嵌入式实验3
CVT6410定时器制作精确延时来控制LED
一、实验目的
1. 熟悉RVDS
2.2开发环境。
2. 掌握S3C6410内部相关寄存器的操作方法,最终实现对外部设备的控制。
3. 熟悉在ARM裸机环境下的C语言编程。
4. 熟悉ARMv6的VIC控制以及S3C6410的timer控制器。
二、实验内容
建立RVDS开发环境。
利用定时器实现对开发板上发光二极管LED的跑马灯控制。
三、实验设备
1. 硬件:CVT6410教学实验箱、PC机;
2. 软件:PC机操作系统Windows 98(2000、XP) +RVDS开发环境。
3. JLINK仿真器。
四、基础知识
从电路图上我们可以看到,发光二极管LED的一端连接到了ARM 的GPIO,另一端经过一个限流电阻接电源VCC3。当GPIO口为低电平时,LED两端产生电压降,这时LED有电流通过并发光。反之当GPIO为高电平时,LED将熄灭。注意亮灭之间要有一定的延时,以
便人眼能够区分出来。
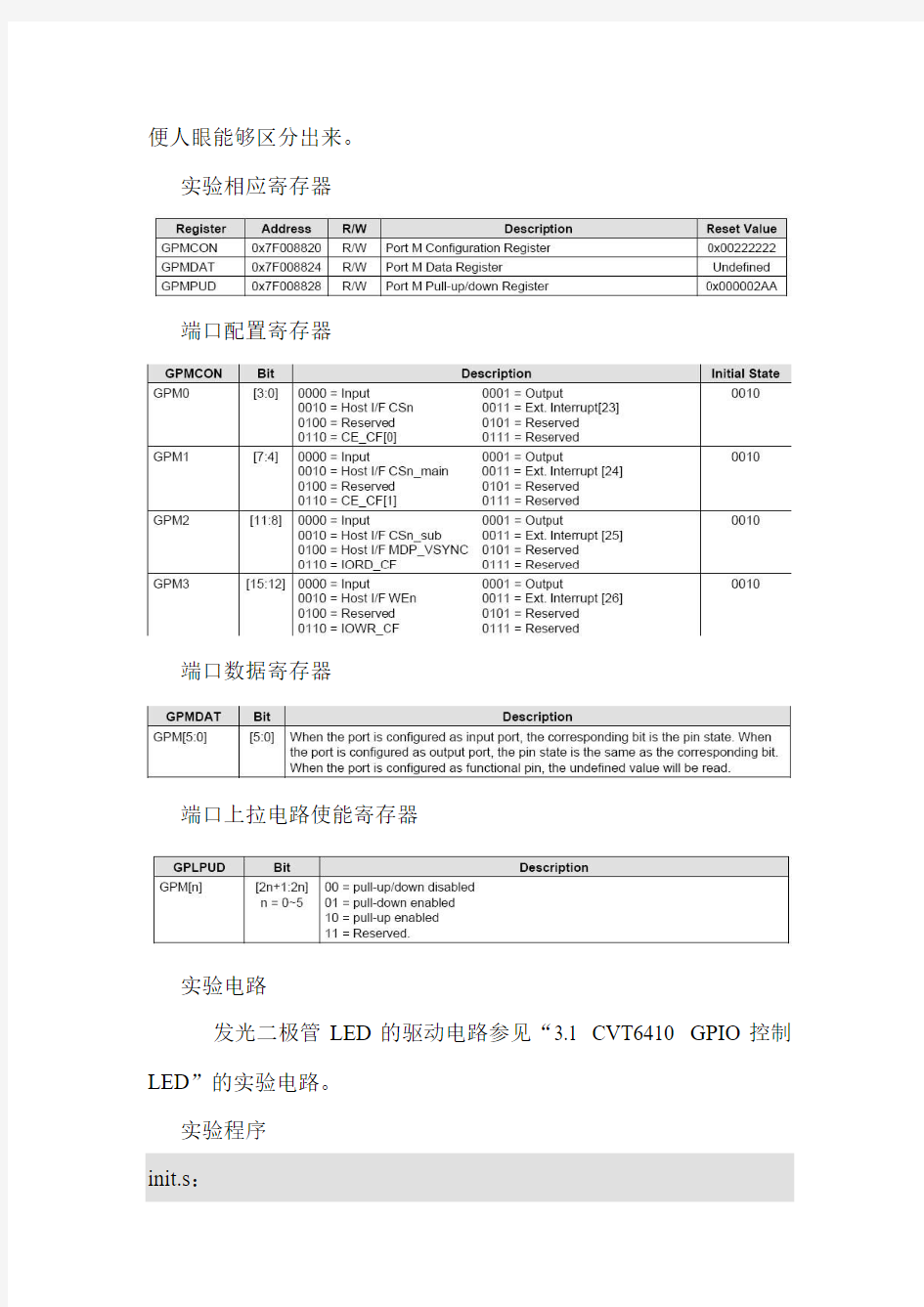
实验相应寄存器
端口配置寄存器
端口数据寄存器
端口上拉电路使能寄存器
实验电路
发光二极管LED的驱动电路参见“3.1 CVT6410 GPIO控制LED”的实验电路。
实验程序
init.s:
IMPORT Main
AREA |C$$code|, CODE, READONLY
global start
start
bl Main
END
Main.c
//程序初始化
#define PCLK 66000000 //for S3C6410 66MHZ
#define HCLK 133000000 //for S3C6410 133MHZ
#define rTCFG0 (*(volatile unsigned *)(0x7F006000)) #define rTCFG1 (*(volatile unsigned *)(0x7F006004)) #define rTCON (*(volatile unsigned *)(0x7F006008))
#define rTCNTB0 (*(volatile unsigned *)(0x7F00600C)) #define rTCMPB0 (*(volatile unsigned *)(0x7F006010)) #define rTCNTO0 (*(volatile unsigned *)(0x7F006014)) #define rTCNTB1 (*(volatile unsigned *)(0x7F006018)) #define rTCMPB1 (*(volatile unsigned *)(0x7F00601c))
#define rTCNTO1 (*(volatile unsigned *)(0x7F006020))
#define rTCNTB2 (*(volatile unsigned *)(0x7F006024))
#define rTCNTO2 (*(volatile unsigned *)(0x7F00602c))
#define rTCNTB3 (*(volatile unsigned *)(0x7F006030))
#define rTCNTO3 (*(volatile unsigned *)(0x7F006038))
#define rTCNTB4 (*(volatile unsigned *)(0x7F00603c))
#define rTCNTO4 (*(volatile unsigned *)(0x7F006040))
#define rTINT_CSTA T (*(volatile unsigned *)(0x7F006044))
#define U8 unsigned char
//Timer2做的一个us延时
void uDelay(int usec)
{
//初始化LED的IO设置
unsigned int val = (PCLK)/1000000-1;
rTCFG0 &= ~(0xff<<8);
rTCFG0 |= 0<<8;
rTCFG1 &= ~(0xf<<8);
rTCFG1 |= 0<<8;
rTCNTB2 = val;
rTCON &= ~(0xf<<12);
rTCON |= 0xb<<12;
rTCON &= ~(2<<12);
while(usec--)
{
while(rTCNTO2>=val>>1);
while(rTCNTO2
};
}
//循环延时
void msDelay(int time)
{
volatile unsigned int i,j;
for(i = 0; i < 2000000; i++)
for(j=0; j } void LedTest(void) { volatile unsigned int i; *((U8*) 0x3800B000) = 0xff; uDelay(1000000); *((U8*) 0x3800B000) = 0x0; uDelay(1000000); //进入循环操作,LED灯轮流闪烁 while (1) { for(i=1; i<9; i++) { *((U8*) 0x3800B000) = 1<<(i-1); uDelay(1000000); } } } void Main(void) { LedTest(); } 五、实验步骤 1. 准备好实验环境,将JLINK连接好。给开发板上电,使Bootloader 停在菜单处。 2. 打开软件…Code Warrior forRVDS?,新建工程…timerLed.mcp?,并添加 两个程序文件…main.c?和…init.s?(汇编文件)。 3. 对工程文件进行相应设置 4. 编译该工程,成功后将生成映像文件…timerLed.axf?。打开AXD,装载映像文件…timerLed.axf?。 5. 运行程序,观察结果。 六、实验结果 四个LED轮流闪烁,实现流水灯控制。 七、总结 这次的实验是用定时器来控制流水灯的,通过定时器的定时时间来决定LED亮的时间,时间可快可慢。首先知道实验的电路知道定时器是怎么控制LED的,在看懂程序后运行,就会得出实验结果,改变程序中的时间可以改变LED亮的频率。 CVT6410串口UART0实验 一、实验目的 1. 熟悉RVDS 2.2开发环境。 2. 掌握S3C6410内部相关寄存器的操作方法,最终实现对外部设备的控制。 3. 熟悉在ARM裸机环境下的C语言编程。 4. 熟悉S3C6410的串口编程。 二、实验内容 建立RVDS开发环境。 学习并编程实现ARM的UART通讯。 三、实验设备 1. 硬件:CVT6410教学实验箱、PC机; 2. 软件:PC机操作系统Windows 98(2000、XP) +RVDS开发环境。 3. JLINK仿真器。 四、基础知识 串行通信接口电路一般由可编程的串行接口芯片、波特率发生器、EIA与TTL电平转换器以及地址译码电路组成。采用的通信协议有两类:异步协议和同步协议。随着大规模集成电路技术的发展,通用的同步(USRT)和异步(UART)接口芯片种类越来越多,它们的基本功 能是类似的。采用这些芯片作为串行通信接口电路的核心芯片,会使电路结构比较简单。下面介绍了异步串行通信的基本原理、串行接口的物理层标准以及S3C6410串行口控制器。 1. 异步串行通信 异步串行方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。数据的各不同位可以分时使用同一传输通道,因此串行I/O可以减少信号连线,最少用一对线即可进行。接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。为了恢复发送的信息,双方必须协调工作。在微型计算机中大量使用异步串行I/O方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。 图3-1给出异步串行通信中一个字符的传送格式。开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0”作为起始位,然后出现在通信线上的是字符的二进制编码数据。每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。最后是表示停止位的“1”信号,这个停止位可以约定持续1位、1.5位或2位的时间宽度。至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。 每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特率为110,150,300,600,1200,2400,4800,9600等。 图3-1 串行通信字符格式 2. 串行接口的物理层标准 通用的串行I/O接口有许多种,现就最常见的两种标准作简单介绍。 1) EIA RS-232C 这是美国电子工业协会推荐的一种标准(Electronic industries Association Recoil-mendedStandard)。它在一种25针接插件(DB-25)上定义了串行通信的有关信号。这个标准后来被世界各国所接受并使用到计算机的I/O接口中。 在实际异步串行通信中,并不要求用全部的RS-232C信号,许多PC/XT兼容机仅用15针接插件(DB-15)来引出其异步串行I/O信号,而PC中更是大量采用9针接插件(DB-9)来担当此任。图3-2分别给出了DB-25和DB-9的引脚定义,表3-3列出了引脚的名称以及简要说明。 图3-2 DB-25和DB-9引脚定义 表3-3 引脚说明: 全称说明 引脚名 称 FG Frame Ground 连到机器的接地线 TXD Transmitted Data 数据输出线 RXD Received Data 数据输入线 RTS Request to Send 要求发送数据 回应对方发送的RTS的发送许可,CTS Clear to Send 告诉对方可以发送 DSR Data Set Ready 告知本机在待命状态 Data Terminal DTR 告知数据终端处于待命状态 Ready 载波检出,用以确认是否收到CD Carrier Detect Modem的载波 信号线的接地线(严格的说是信号SG Signal Ground 线的零标准线) 图3-4给出了两台微机利用RS-232C接口通信的两种基本连接方式。 简单连 接 完全连 接 图5-5 RS-232连线图 2) 信号电平规定 RS-232C规定了双极性的信号逻辑电平, 它是一套负逻辑定义:-3V到-25V之间的电平表示逻辑“1”。 +3V到+25V之间的电平表示逻辑“0”。 以上标准称为EIA电平。PC/XT系列使用的信号电平是-12V和+12V,符合EIA标准,但在计算机内部流动的信号都是TTL电平,因此这中间需要用电平转换电路。常用专门的RS-232接口芯片,如SP3232、SP3220等,在TTL电平和EIA电平之间实现相互转换。PC/XT 系列以这种方式进行串行通信时,在波特率不高于9600的情况下,理论上通信线的长度限制为15米。 实验相应寄存器 实验电路 实验程序 /********************************************************** *********/ //程序名:UART.C //功能:串口接收和打印字符信息 /********************************************************** *********/ #include "6410addr.h" #include "typdef.h" #include #include #include #include #include #define PCLK 66000000 U16 UDIVSLOT_DATA[16]= { 0x0000,0x0080,0x0808,0x0888,0x2222,0x4924,0x4A52,0x54AA, 0x5555,0xD555,0xD5D5,0xDDD5,0xDDDD,0xDFDD,0xDFDF,0xFFDF }; /********************************************************** ********/ //程序名:GPIO_Config() //功能: 配置GPIO为串口模式 //参数:无 //返回值:无 //备注: /********************************************************** ********/ void GPIO_Config() { //PORT A GROUP //BIT [31:28] [27:24] [23:20] [19:16] [15:12] [11:8] [7:4] [3:0] //CONFIG 0010 0010 0010 0010 0010 0010 0010 0010 //Function RTSn1 CTSn1 RTXD1 RXD1 RTSn0 CTSn0 TXD0 RXD0 rGPACON=0x22222222; rGPAPUD=0x00; //上下拉电阻禁止 } /********************************************************** *******/ //程序名: UartInit() //功能:串口初始化 //参数:无 //返回值:无 //备注:这里只对串口0进行初始化 /********************************************************** *******/ /*void UartInit(int ch,int baud) { int a; U8 temp; float x; if(!ch) { if(!ch) { rULCON0=0x03; //正常模式无奇偶校验,一个停止位,8个数据位 rUCON0 =0x885; //时钟源采用PCLK,中断为脉冲方式,不产生接收错误状态中断,发射接收均为正常模式 rUFCON0=0x0; //FIFO禁止 rUMCON0=0x0; //FIFO禁止, nRTS无效 rUBRDIV0=(PCLK/(baud*16)-1); //DIV_V AL=(PCLK/(bpsx16))-1;UBRDIV0是DIV_V AL的整数部分,PCLK初始化为66MHz x=(float)((PCLK/(baud*16)-1)%1); a=(int)(x*16); rUDIVSLOT0=UDIVSLOT_DATA[a]; temp=rURXH0; } else { rULCON1=0x03; //正常模式无奇偶校验,一个停止位,8个数据位 rUCON1 =0x885; //时钟源采用PCLK,中断为脉冲方式,不产生接收错误状态中断,发射接收均为正常模式 rUFCON1=0x0; //FIFO禁止 rUMCON1=0x0; //FIFO禁止,nRTS无效 rUBRDIV1=(PCLK/(baud*16)-1); //DIV_V AL=(PCLK/(bpsx16))-1;UBRDIV0是DIV_V AL的整数部分,PCLK初始化为66MHz x=(float)((PCLK/(baud*16)-1)%1); a=(int)(x*16); rUDIVSLOT1=UDIVSLOT_DATA[a]; temp=rURXH1; } } }*/ void UartInit(void) { U8 temp; rULCON0=0x03; //正常模式无奇偶校验,一个停止位,8个数据位 rUCON0 =0x885; //时钟源采用PCLK,中断为脉冲方式,不产生接收错误状态中断,发射接收均为正常模式rUFCON0=0x0; //FIFO禁止 rUMCON0=0x0; //FIFO禁止,nRTS无效 rUBRDIV0=0x22; rUDIVSLOT0=0xDFDD; temp=rURXH0; //将接收到的数据赋给temp } void Delay(int t) //延时一小段时间 { while(t--); } /********************************************************** *******/ //程序名:void UartSend() //功能 串口0发送数据 //参数 data //返回值:无 /********************************************************** *******/ void UartSend(char data) //串口0发射数据,开发板只用到串口0 { if(data=='\r') //判断是否为回车键 { while(!(rUTRSTAT0 & 0x2)); Delay(100); rUTXH0='\n'; //如果是回车则换行 } while(!(rUTRSTAT0 & 0x2)); Delay(100); rUTXH0=data; } /********************************************************** *******/ //程序名:char getch() //功能 串口0接收数据 //参数 无 //返回值:rURXH0 /********************************************************** *******/ char getch(void) { while(!(rUTRSTAT0&0x1)); //等待直到接受到一个数据return rURXH0; } /********************************************************** *******/ //程序名:Uart_SendString() //功能 串口发送字符 //参数 无 //返回值:无 /********************************************************** 嵌入式系统综合实验一 学号: 装 订 线 实验报告 课程名称: 嵌入式系统设计 指导老师:马永昌 成绩:________________ 实验名称:综合实验一dht11和人体感应传感器 实验类型:验证型 同组学生姓名:孙凡原 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握字符设备驱动程序的基本结构和开发方法 2.掌握用户空间调用设备驱动的方法 3.掌握用户和内核的交互 二、实验内容和原理 专业:测控技术与仪器 姓名:颜睿 装订 线1.编写温湿度传感器DHT11驱动,传输打印温湿度信息 2.编写人体感应传感器驱动,控制LED灯亮灭 原理: 温湿度传感器DHT11: 1.引脚图 实际使用传感器没有NC引脚 2.数据采集 a.数据总时序 用户主机发送一次开始信号后,DHT11 从低功耗模式转换到高速模式,待主机开始信号结束后,DHT11 发送响应信号,送出40bit 的数据,幵触发一次信采集。 b.主机发送起始信号 连接DHT11的DATA引脚的I/O口输出低电平,且低 电平保持时间不能小于18ms,然后等待DHT11 作出 应答信号。 装 线 订 c.检测从机应答信号 DHT11 的DATA 引脚检测到外部信号有低电平时, 等待外部信号低电平结束,延迟后DHT11 的DATA 引脚处于输出状态,输出80 微秒的低电平作为应答信 号,紧接着输出80 微秒的高电平通知外设准备接收数 据。 装 订线 d.接收数据 (1)数据判定规则 位数据“0”的格式为:50 微秒的低电平和26-28 微秒的高电平,位数据“1”的格式为:50 微秒的低电平加70微秒的高电平。 接收数据时可以先等待低电平过去,即等待数据线拉高,再延时60us,因为60us大于28us且小于70us,再检测此时数据线是否为高,如果为高,则数据判定为1,否则为0。 (2)数据格式 一次传送40 位数据,高位先出 8bit 湿度整数数据+ 8bit 湿度小数数据+8bit 温度整 实验一linux基本操作实验的实验报告 一实验目的 1、熟悉嵌入式开发平台部件,了解宿主机/目标机开发模式; 2、熟悉和掌握常用Linux的命令和工具。 二实验步骤 1、连接主机和目标板;(三根线,网线直接连接实验箱和PC机,实验箱UART2连接主机的UART口)。 2、Linux命令的熟悉与操作 PC端:在PC机的桌面上打开虚拟机,并启动Linux系统,打开命令终端,操作Linux基本命令,如:查看:ls,进入目录:cd,创建文件:mkdir,删除文件:rmdir,配置网络:ifconfig,挂载:mount,设置权限:chmod,编辑器:vi,拷贝:cp等命令,要求能熟练操作。 使用方法: 1.查看:ls Ls列出文件和目录 Ls–a 显示隐藏文件 Ls–l 显示长列格式ls–al 其中:蓝:目录;绿:可执行文件;红:压缩文件;浅蓝:链接文件;灰:其他文件;红底白字:错误的链接文件 2.进入目录:cd 改变当前目录:cd 目录名(进入用户home目录:cd ~;进入上一级目录:cd -) 3.创建文件:mkdir 建立文件/目录:touch 文件名/mkdir目录名 4.删除文件:rmdir 删除空目录:rmdir目录名 5.配置网络:ifconfig 网络- (以太网和WIFI无线) ifconfig eth0 显示一个以太网卡的配置 6.挂载:mount mount /dev/hda2 /mnt/hda2 挂载一个叫做hda2的盘- 确定目录'/ mnt/hda2' 已经存在 umount /dev/hda2 卸载一个叫做hda2的盘- 先从挂载点'/ mnt/hda2' 退出fuser -km /mnt/hda2 当设备繁忙时强制卸载 umount -n /mnt/hda2 运行卸载操作而不写入/etc/mtab文件- 当文件为只读或当磁盘写满时非常有用 mount /dev/fd0 /mnt/floppy 挂载一个软盘 mount /dev/cdrom /mnt/cdrom挂载一个cdrom或dvdrom mount /dev/hdc /mnt/cdrecorder挂载一个cdrw或dvdrom mount /dev/hdb /mnt/cdrecorder挂载一个cdrw或dvdrom mount -o loop file.iso /mnt/cdrom挂载一个文件或ISO镜像文件 实验报告 课程名称:嵌入式系统 学院:信息工程 专业:电子信息工程 班级: 学生姓名: 学号: 指导教师: 开课时间:学年第一学期 实验名称:IO接口(跑马灯) 实验时间:11.16 实验成绩: 一、实验目的 1.掌握 STM32F4 基本IO口的使用。 2.使用STM32F4 IO口的推挽输出功能,利用GPIO_Set函数来设置完成对 IO 口的配置。 3.控制STM32F4的IO口输出,实现控制ALIENTEK 探索者STM32F4开发板上的两个LED实现一个类似跑马灯的效果。 二、实验原理 本次实验的关键在于如何控制STM32F4的IO口输出。IO主要由:MODER、OTYPER、OSPEEDR、PUPDR、ODR、IDR、AFRH和AFRL等8个寄存器的控制,并且本次实验主要用到IO口的推挽输出功能,利用GPIO_Set函数来设置,即可完成对IO口的配置。所以可以通过了开发板上的两个LED灯来实现一个类似跑马灯的效果。 三、实验资源 实验器材: 探索者STM32F4开发板 硬件资源: 1.DS0(连接在PF9) 2.DS1(连接在PF10) 四、实验内容及步骤 1.硬件设计 2.软件设计 (1)新建TEST工程,在该工程文件夹下面新建一个 HARDWARE文件夹,用来存储以后与硬件相关的代码。然后在 HARDWARE 文件夹下新建一个LED文件夹,用来存放与LED相关的代码。 (2)打开USER文件夹下的test.uvproj工程,新建一个文件,然后保存在 LED 文件夹下面,保存为 led.c,在led.c中输入相应的代码。 (3)采用 GPIO_Set 函数实现IO配置。LED_Init 调用 GPIO_Set 函数完成对 PF9 和 PF10 ALIENTEK 探索者 STM32F407 开发板教程 119 STM32F4 开发指南(寄存器版) 的模式配置,控制 LED0 和 LED1 输出 1(LED 灭),使两个 LED 的初始化。 (4)新建一个led.h文件,保存在 LED 文件夹下,在led.h中输入相应的代码。 3.下载验证 使用 flymcu 下载(也可以通过JLINK等仿真器下载),如图 1.2所示: 图1.2 运行结果如图1.3所示: 课题:按键控制流水灯 专业:物联网工程 班级:01 学号:14154951 姓名:李政 指导教师:何建军 设计日期:2016.12.21—2016.12.30 成绩: 重庆大学城市科技学院电气学院 嵌入式设计报告 一、设计目的作用 通过编程实现对LED灯项目的改变,加深对stm32芯片的理解,对keil软件的熟悉掌握,工程的搭建以及头文件的使用。掌握外部设备的接入以及外部中断的实现。 二、设计要求 用四个按键控制8个流水灯的流水显示 (1).按键A按下时候流水灯按从左往右的流水显示。 (2).按键B按下时候流水灯按从右往左的流水显示。 (3).按键C按下时候流水灯按中心开花的方式流水显示:从中间向两边流水显示 (4).按键D按下时候流水灯按从两边到中心移动的方式流水显示。(5).(选做)引入时针中断: 默认的流水方式: (1)对时钟中断的次数进行计数 (2)当时钟中断的次数除以4的余数为0时:按从左到右的顺序流水显示(3)当时钟中断的次数除以4的余数为1时:按从右到左的顺序流水显示(4)当时钟中断的次数除以4的余数为2时:按中心开花的方式流水显示(5)当时钟中断的次数除以4的余数为3时:从两边到中心移动的方式流水显示。 系统启动时按默认的流水方式显示,当按下A、B、C、D四个按键时,按指定的方式流水显示,当按下按键E时恢复按默认的流水方式。 三、设计的具体实现 1、设计原理 这次使用的是stm32f103系列芯片,芯片引脚如下图 Stm32内部资源 GPIO原理及应用: 有7个16位并行I/O口:PA、PB、PC、PD、 PE、PF、PG 都是复用的,最少有2种 功能,最多有6种功能 实验三:文件、目录及其操作命令 1实验目的 通过实验掌握如Linux操作系统的基本操作 2实验设备 硬件:PC机一台 软件:Windows98/XP/2000系统,VMware Workstation6.0,Red Hat Linux 3实验内容 (1)文件的复制、删除和移动命令:cp, rm, mv (2)Linux文件与目录 (3)目录命令:mkdir, rmdir, cd, pwd, ls (4)链接文件与ln (5)文件与目录的权限 4实验预习要求 仔细阅读参考书: 【1】鸟哥的Linux私房菜基础学习篇第三版,人民邮电出版社,鸟哥 【2】嵌入式Linux系统开发标准教程,人民邮电出版社,华清远见嵌入式培训中心 【3】嵌入式Linux应用程序开发标准教程,人民邮电出版社,华清远见嵌入式培训中心关于Linux文件与目录的部分。 5实验步骤 (1)熟悉Red Hat Enterprise Linux系统。 (2)根据实验重点内容测试。 6实验重点: (1)文件的复制、删除与移动:cp, rm, mv 要复制文件,请使用cp (copy) 这个命令即可。不过,cp 这个命令的用途不仅仅于此。除了单纯的复制之外,还可以建立连结文件(就是快捷方式),比对两文件的新旧而予以更新,以及复制整个目录等等的功能。至于移动目录与文件,则使用mv (move),这个命令也可以直接拿来作重命名(rename) 的操作!至于(移除)删除文件,使用rm (remove) 这个命令。 cp (复制文件或目录) [root@localhost ~]# cp [-adfilprsu] 源文件(source) 目标文件(destination) [root@localhost ~]# cp [options] source1 source2 source3 .... directory 选项与参数: -a:相当于-pdr 的意思,至于pdr 请参考下列说明;(常用) -d:若源文件为链接文件的属性(link file),则复制链接文件属性而非文件本身; -f :为强制(force)的意思,若目标文件已经存在则无法开启,则移除后再尝试一次; -i :若目标文件(destination)已经存在时,在覆盖时会先询问操作的进行(常用) -l :进行硬式连结(hard link)的连结文件建立,而非复制文件本身; -p:连同文件的属性一起复制过去,而非使用默认属性(备份常用); -r :递归持续复制,用于目录的复制行为;(常用) -s :复制成为符号链接文件(symbolic link),亦即快捷方式文件; -u :若destination 比source 旧,才更新destination ! 最后需要注意的,如果源文件有两个以上,则最后一个目标文件一定要是目录才行! 范例一:用root身份,将主目录下的.bashrc 复制到/temp 下,并更名为bashrc (~代表目前用户身份所在的主文件夹) [root@localhost ~]# cp ~/.bashrc /temp/bashrc [root@localhost ~]# cp -i ~/.bashrc /temp/bashrc cp: overwrite `/temp/bashrc'? n <==n不覆盖,y为覆盖 说明:重复作两次操作,由于/temp 下已经存在bashrc 了,加上-i 选项后,则在覆盖前会询问使用者是否确定!可以按下n 或者y 来二次确认。 范例二:将主目录下的.bashrc和.bash_history 复制到/temp下。 [root@localhost ~]cp ~/.bashrc ~/.bash_history /temp 可以将多个数据一次复制到同一目录中去,最后面一定是目录。 范例三:复制/etc/ 这个目录下的所有内容到/tmp 下 [root@www tmp]# cp /etc/ /tmp cp: omitting directory `/etc' <== 如果是目录则不能直接复制,要加上-r 的选项 [root@www tmp]# cp -r /etc/ /tmp -r 是可以复制目录,但是,文件与目录的权限可能会被改变。所以,也可以利用cp –a /etc /tmp 来下执行!尤其是在备份的情况下! rm (移除文件或目录) [root@localhost ~]# rm [-fir] 文件或目录 选项与参数: 嵌入式技术 实验报告 系别:计算机与科学技术系 班级:计12-1班 姓名:刘杰 学号:12101020128 总成绩: 评语: 日期: 2.在弹出的对话框中依次选择“cedevice emulator emulator kdstub”。 3.选择“Build OS”菜单的“sysgen”开始构建平台。 1.1.4连接,下载和运行平台 1.选择“Target”菜单下的“Connection option”菜单项。 2.在新的对话框中,配置连接关系 3.选择“Target”菜单下的“attach”菜单项,开始下载。 ?实验结果 操作系统定制成功,能正常运行。 ?结果截图 ?问题总结 由于对实验平台了解不够,致使操作过程中添加和删除组件时不知道该如何下手,影响整个实验进度。 实验1.2: 1.打开Platform Builder,并且打开实验1的工程,在实验1的工程基础上做本实验。 进程显示 IE信息查看 报文监测 实验1.3使用Platform Builder开发应用程序 简单实验步骤 1.打开Platform Builder。 2.选择“File”菜单下的“Open Workspace…”,然后打开实验1中创建的平台,本实验要基于 上面的实验的基础上做。 3.选择“File”菜单下的“New Project or File…”,打开“New Project or File”对话框。 4.在“Projects”选项页中选择“WCE Application”;在“Project Name”中输入项目的名字,例 如“MyApp”。 5.在“New Project Wizard – step 1 of 1”中选择“A typical Hello World Application”,点击“Finish” 按钮。 6.选择“Build”菜单中的“Build MyApp.exe”来编译应用程序。 实验名称: 姓名: 学号: 装 订 线 P.1 实验报告 课程名称: 嵌入式系统设计 指导老师:马永昌 成绩:________________ 实验名称:综合实验一dht11和人体感应传感器 实验类型:验证型 同组学生姓名:孙凡原 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握字符设备驱动程序的基本结构和开发方法 2.掌握用户空间调用设备驱动的方法 3.掌握用户和内核的交互 二、实验内容和原理 1.编写温湿度传感器DHT11驱动,传输打印温湿度信息 2.编写人体感应传感器驱动,控制LED 灯亮灭 原理: 温湿度传感器DHT11: 1.引脚图 实际使用传感器没有NC 引脚 2.数据采集 a.数据总时序 用户主机发送一次开始信号后,DHT11 从低功耗模式转换到高速模式,待主机开始信号结束后,DHT11 发 专业:测控技术与仪器 姓名:颜睿 学号:3130103850 日期:2018.4.28 地点:创客空间 装订线送响应信号,送出40bit 的数据,幵触发一次信采集。 b.主机发送起始信号 连接DHT11的DATA引脚的I/O口输出低电平,且低电平保持时间不能小于18ms,然后等待DHT11 作出应答信号。 c.检测从机应答信号 DHT11 的DATA 引脚检测到外部信号有低电平时,等待外部信号低电平结束,延迟后DHT11 的DATA引脚处于输出状态,输出80 微秒的低电平作为应答信号,紧接着输出80 微秒的高电平通知外设准备接收数据。 d.接收数据 (1)数据判定规则 位数据“0”的格式为:50 微秒的低电平和26-28 微秒的高电平,位数据“1”的格式为:50 微秒的低电平加70微秒的高电平。 接收数据时可以先等待低电平过去,即等待数据线拉高,再延时60us,因为60us大于28us且小于70us,再检测此时数据线是否为高,如果为高,则数据判定为1,否则为0。 嵌入式linux开发环境的建立 一、创建文件:vi hello.c如下: 二、安装交叉编译器: arm-linux-gcc-3.4.6-glibc-2.3.6.tar 步骤1、把交叉编译链考贝到任意目录下,并解压:tar zxvf arm-linux-gcc-3.4.6-glibc-2.3.6.tar –C / 2、把以上路径添加到/etc/profile文件的最后:export PATH=$PATH:/gcc-3.4.6-glibc-2.3.6/arm-linux/bin 3、输入命令使环境变量立即生效:source /tec/profile 4、测试是否安装成功:arm-linux-gcc–v 如果显示版本号,则安装成功。 5、编译C文件:arm-linux-gcc hello.c–o hello 三、配置tftp服务步骤 1、检查系统有无安装包:用命令:rpm –aq | grep tftp,如有安装包的版本号,说明系统已有相应的安装包; 2、配置服务器,打开文件:vi /etc/xinetd.d/tftp,显示如下桌面service tftp { socket_type = dgram protocol = udp wait = yes user = root server = /usr/sbin/in.tftpd server_args = -s /tftpboot disable = yes } 然后编辑将disable改为no,其他不变 3、重启xinetd服务:service xinetd restart, 停止 xinetd: [ 确定 ] 启动 xinetd: [ 确定 ] 4、输入如下命令:netstat –a | grep tftp,如果出现如下画面 嵌入式系统实验实验报告 一、实验目的 1.基本实验 . Word 资料搭建PXA270嵌入式LINUX开发软硬件环境;安装LINUX操 作系统;安装与配置建立宿主机端交叉编译调试开发环境;配置宿主机 PC 机端的minicom(或超级终端)、TFTP服务、NFS服务,使宿主PC机与PXA270开发板可以通过串口通讯,并开通TFTP 和NFS服务。 2.人机接口 键盘驱动;LCD控制;触摸屏数据采集与控制实验; 3.应用实验 完成VGA显示;Web服务器实验;网络文件传输实验;多线程应用实验。 4.扩展应用实验 完成USB摄像头驱动与视频采集;GPS实验;GSM/GPRS通讯;视频播放移植;USB蓝牙设备无线通讯;NFS文件服务器;蓝牙视频文件服务器。 5.QT实验 完成基本嵌入式图形开发环境搭建;“Hello world!”QT初探;创建一个窗口并添加按钮;对象通信:Signal和Slot;菜单和快捷键;工具条和状态栏;鼠标和键盘事件;对话框;QT的绘图;俄罗斯方块;基于QT的GSM手机在嵌入式LINUX下的设计与实现。 二、实验内容 1.人机接口实验 实验十九键盘驱动实验 ?实验目的:矩阵键盘驱动的编写 ?实验内容:矩阵键盘驱动的编写 ?作业要求:完成键盘加减乘除运算 ?实验作业源码及注释: #INCLUDE 《嵌入式数据库sqlite移植及使用》 实验报告 学生姓名:陈彤 学号:13004405 专业班级:130044 指导教师:孙国梓 完成时间:2016.5.31 实验3 嵌入式数据库sqlite移植及使用 一.实验目的 理解嵌入式软件移植的基本方法,掌握sqlite数据库软件移植的步骤,掌握sqlite开发的两种方式—命令模式和C代码开发模式的使用方法,并编程实现简单通讯录查询实验。 二.实验内容 实验3.1 移植嵌入式数据库sqlite 实验3.2 简单通讯录查询实例设计和测试 三.预备知识 Linux使用、数据库相关知识等 四.实验设备及工具(包括软件调试工具) 硬件:ARM 嵌入式开发平台、PC 机Pentium100 以上、串口线。 软件:WinXP或UBUNTU开发环境。 五.实验步骤 5.1 移植嵌入式数据库sqlite 步骤【参看教材103页】: 第一步,解压缩sqlite源码,命令tar zxvf sqlite-autoconf-3080900.tar.gz,在解压后的文件夹下,可以看到源码文件有shell.c 和sqlite3.c文件,生成Makefile的配置脚本文件configure.ac ,并检查当前文件夹下__A__(A.存在 B.不存在)Makefile文件。 第二步利用configure脚本文件生成基于ARM实验台的Makefile,具体命令为./configure CC=arm-linux-gcc –prefix=/opt/sqlite –host=arm-linux(假设安装目录为/opt/sqlite),并检查当前文件夹下___A__(A.存在 B.不存在)Makefile文件。 第三步,编译sqlite,命令为_make_,编译过程中使用的编译器为_ arm-linux-gcc _。 第四步,安装sqlit,命令为_make install_。安装完成后到_/opt/sqlite_文件夹下去查看相关文件,可以看到该文件夹下有_bin_、_include_、__lib__和share文件夹,其中可执行文件sqlite3位于_./bin_文件夹,库位于_./lib_文件夹。 第五步,将sqlite3拷贝到开发板bin目录下,将库下的文件拷贝到开发板的lib目录下【注意链接文件的创建】 第六步,数据库的使用 方式1:命令操纵数据库 在超级终端环境下创建数据库stucomm.db,命令为_sqlite3 stucomm.db_; 创建数据表stutable,字段包括id 整型,name 字符型,phoneNum 字符型,具体命令为_sqlite> create table stutable (id int(20),name char(20),phoneNum char(20));_; 插入2条记录,记录信息如下 001,zhangsan,10086 002,lisi,10000 河南机电高等专科学校《嵌入式系统开发》课程实验报告 系部:电子通信工程系 班级:电信1## 姓名: ###### 学号: 120###### 实验三按键实验(中断方式) 一.实验简介 在实验一的基础上,使用按键控制流水灯。 二.实验目的 熟练使用库函数操作GPIO,掌握中断配置和中断服务程序编写方法,掌握通过全局变量在中断服务程序和主程序间通信的方法。 三.实验内容 实现初始化GPIO,并配置中断,在中断服务程序中通过修改全局变量,达到控制流水灯速度及方向。 下载代码到目标板,查看运行结果。 四.实验设备 硬件部分:PC计算机(宿主机)、STM32实验板。 软件部分:PC机WINDOWS系统、MDK KEIL软件、ISP软件。 五.实验步骤 1在实验一代码的基础上,编写中断初始化代码 2在主程序中声明全局变量,用于和中断服务程序通信,编写完成主程序 3编写中断服务程序 4编译代码,下载到实验板 5.单步调试 6记录实验过程,撰写实验报告 六.实验结果及测试 中断方式的按键式实验,是通过配置外部中断寄存器和中断嵌套(NVIC)控制器来实现按键按下控制LED灯亮灭。通过按键中断打断主函数,执行LED1取反一次。 主函数初始化中断配置和LED配置,点亮LED1后一直等待中断,每中断一次,LED1取反一次。 int main(void) { LED_GPIO_Config(); LED1_ON; CLI(); SEI(); EXTI_PA0_Config(); while(1) { } } 中断嵌套控制寄存器的配置为中断嵌套分组1;抢占优先级0;响应优先级0 代码如下: void NVIC_Configuration(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } 外部中断按键的配置源码如下:配置PA0位中断线,并使能AFIO时钟void EXTI_PA0_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; EXTI_InitTypeDef EXTI_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO,ENABLE); NVIC_Configuration(); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); EXTI_InitStructure.EXTI_Line = EXTI_Line0; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure); } 目录 实验一跑马灯实验 (1) 实验二按键输入实验 (3) 实验三串口实验 (5) 实验四外部中断实验 (8) 实验五独立看门狗实验 (11) 实验七定时器中断实验 (13) 实验十三ADC实验 (15) 实验十五DMA实验 (17) 实验十六I2C实验 (21) 实验十七SPI实验 (24) 实验二十一红外遥控实验 (27) 实验二十二DS18B20实验 (30) 实验一跑马灯实验 一.实验简介 我的第一个实验,跑马灯实验。 二.实验目的 掌握STM32开发环境,掌握从无到有的构建工程。 三.实验内容 熟悉MDK KEIL开发环境,构建基于固件库的工程,编写代码实现跑马灯工程。通过ISP 下载代码到实验板,查看运行结果。使用JLINK下载代码到目标板,查看运行结果,使用JLINK在线调试。 四.实验设备 硬件部分:PC计算机(宿主机)、亮点STM32实验板、JLINK。 软件部分:PC机WINDOWS系统、MDK KEIL软件、ISP软件。 五.实验步骤 1.熟悉MDK KEIL开发环境 2.熟悉串口编程软件ISP 3.查看固件库结构和文件 4.建立工程目录,复制库文件 5.建立和配置工程 6.编写代码 7.编译代码 8.使用ISP下载到实验板 9.测试运行结果 10.使用JLINK下载到实验板 11.单步调试 12.记录实验过程,撰写实验报告 六.实验结果及测试 源代码: 两个灯LED0与LED1实现交替闪烁的类跑马灯效果,每300ms闪烁一次。七.实验总结 通过本次次实验我了解了STM32开发板的基本使用,初次接触这个开发板和MDK KEILC 软件,对软件操作不太了解,通过这次实验了解并熟练地使用MDK KEIL软件,用这个软件来编程和完成一些功能的实现。作为STM32 的入门第一个例子,详细介绍了STM32 的IO口操作,同时巩固了前面的学习,并进一步介绍了MDK的软件仿真功能。 实验一基本接口实验(一) [实验设备] 1.JXARM9-2410教学实验箱 2.ADT1000仿真器和ADT IDE集成开发环境 3.串口、并口连接线 [实验目的] 1.掌握ARM的串行口工作原理,编程实现ARM的UART通讯; 2.掌握嵌入式系统中断的处理流程和ARM中断编程; 3.在ADT环境下如何建立工程,对工程进行正确的设置。添加相应文件(汇编、脚本、.c 源文件等) [实验内容一] 实现查询方式串口的收发功能。接收来自串口(通过超级终端)的字符并将接收到的字符发送到超级终端。 [预备知识] 1.了解ADT集成开发环境的基本功能 2.学习串口通讯的基本知识 3. 熟悉S3C2410串口有关的寄存器 [基础知识] 串行通信接口电路组成 1.可编程的串行接口芯片 2.波特率发生器 3.EIA与TTL电平转换器 4.地址译码电路 通信协议: 1.异步协议 2.同步协议 异步串行通讯 异步串行方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。 数据的各不同位可以分时使用同一传输通道,因此串行I/O 可以减少信号连线,最少用一对线即可进行。 接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。为了恢复发送的信息,双方必须协调工作。 在微型计算机中大量使用异步串行I/O 方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。 异步串行通信中的字符传送格式 开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0” 作为起始位,然后出现在通信线上的是字符的二进制编码数据。 每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。 最后是表示停止位的“1”信号,这个停止位可以约定持续1 位、1.5 位或2 位的时间宽度。 至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。 每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特率为110,150,300,600,1200,2400,4800,9600 等。 DB-25 DB-9引脚定义 DB-25 DB-9引脚说明 嵌入式linux实验指导书 实验一:arm裸机实验 实验条件: pc ADS开发环境FL2440开发套件SecureCRT串口超级终端 实验目的: 熟悉arm裸机开发基本步骤,掌握ADS集成开发环境的使用,能够编写简单的裸机程序并下载到开发板运行测试。 实验原理: ADS 全称为ARM Developer Suite ,是ARM 公司推出的新一代ARM 集成开发工具。ADS 由命令行开发工具、ARM 实时库、GUI 开发环境(Code Warrior 和AXD) 、实用程序和支持软件组成。有了这些部件,用户就可以为ARM 系列的RISC 处理器编写和调试自己开发的应用程序了。本次实验利用ADS集成开发环境建立基于arm9 S3C2440的实验工程,完成工程搭建、代码编写和编译,生成可执行文件并下载到开发板进行运行测试。 实验步骤: 1、首先打开ADS软件CodeWarrior,点击File 菜单下的New 来创建新工程。Project 对话框中选择ARM Executable Image 。在Project name 中输入工程名,例:2440_led,点击“Location:”文本框的“Set...”按钮,选择要将工程保存的路径,然后点击确定即可建立一个新的工程。工程建立之后会出现一个24 40_led.mcp 窗口。 2、创建源文件,点击File 菜单下的New,选择标签页File,在File name 中输入要建立的文件名,如:Init.s (.s 文件为arm 中的汇编文件),若此时选上了Add to Project,创建的文件会自动添加到工程中,选择target方式为DebugRel,点击确定关闭窗口,文件创建完成后编写代码。(可将arm_linux文件夹下的裸机例程代码复制到工程中进行修改,如:复制裸机程序中的led程序init.s led.c 到建立的工程文件目录中,点击Project 菜单下的Add Fils 将源文件添加到工程中) 嵌入式系统实验报告文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208] 大连理工大学 本科实验报告 课程名称:嵌入式系统实验 学院(系):电子信息与电气工程学部 专业:自动化 班级: 0804 学号: 学生姓名:何韬 2011年 11月 18日 大连理工大学实验报告 学院(系):电信专业:自动化班级: 0804 姓名:何韬学号:组: ___ 实验时间: 2011-11-12 实验室: d108 实验台: 指导教师签字:成绩: 实验二ARM的串行口实验 一、实验目的和要求 见预习报告 二、实验原理和内容 见预习报告 三、主要仪器设备 硬件:ARM嵌入式开发平台、用于ARM7TDMI 的JTAG 仿真器、PC机Pentium100 以上、串口线。 软件:PC 机操作系统win98、Win2000 或WinXP 、ARM SDT 或集成开发环境、仿真器驱动程序、超级终端通讯程序。 四、实验步骤 见预习报告 五、核心代码 在主函数中实现将从串口0接收到的数据发送到串口0() int main(void) { char c1[1]; char err; ARMTargetInit(); 通过调用OSTaskCreate()或OSTaskCreateExt()创建至少一个任务; . OSStart(); /ucos-ii/" /* uC/OS interface */ #include "../ucos-ii/add/" #include "../inc/" #include "../inc/sys/" #include "../src/gui/" #include <> #include <> 《嵌入式系统综合实验》报告 学号: 姓名: Shanghai University of Engineering Science School of Electronic and Electrical Engineering 基于STM32的GPS信息显示系统 ——嵌入式系统综合实验报告 班级:0211112 姓名:褚建勤学号:021111228 班级:0211112 姓名:于心忆学号:021111216 班级:0211112 姓名:乐浩奎学号:021111232 一、产品设计要求(产品规格描述) 1 、嵌入式产品名称 GPS信息显示系统 2 、嵌入式产品目的 在学校的生活中,你经常可能需要联系不是同一间宿舍的同学,但是你不能确定他现在在什么地方,这时候全球定位系统(GPS)就可以发挥作用了,但是传统的GPS系统只能提供经纬度信息,不能直观的显示你想要找到人在何处,我们的系统就在传统的GPS的基础上添加了对应位置显示的功能,方便你更方便更快捷的找到你想找的同学 3 、嵌入式产品功能 使用GPS输入用户位置信息 GPS将相关经纬度信息反馈给主处理器 主处理器处理相关位置信息并将信息转换为对应位置在LCD上显示出来 在LCD上输出用户状态信息 4 、嵌入式产品的输入和输出 输入设备:GPS系统 输出设备:LCD 二、产品方案设计(产品设计方案) 1 2 1 )处理器选择 本系统选用基于ARMCortex-M3内核的STM32F103RB嵌入式微控制器作为处理器。 ①选用原因 A 技术因素 工作频率: 最高72MHz。 内部和外部存储器: 128K字节的闪存程序存储器,用于存放程序及数据;多达20K字节的内置SRAM,CPU能以0等待周期访问(读/写)。 Part1------安装arm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz 1、通过Vmware的共享文件加载压缩文件 arm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz ①首先配置Vmware加载文件所在位置。 ②点击下方的Add按钮,添加文件所在文件夹,一路点击,直至完成,如图所示 2. ①进入linux系统,进入到挂载目录下 ●cd /mnt ②查看挂载目录mnt文件夹下所有目录,看是否有hgfs目录 ●ls ③进入到hgfs下查看,看是否有共享的的D盘 ●cd hgfs ④查看hgfs下文件夹的下的目录 ●Ls /*******************************************************************/ 进入到hgfs下查看,若能查看到对应目录则表示成功,如查看不到请运行下面命令 输入命令 ●cd /usr/bin ●./vmware-config-tools.pl 先后输入Y和N安装虚拟机工具即可 /****************************************************************************/ ⑤进入到挂载目录下的目标文件位置 (即一直进入到arm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz所在的目录) ●cd D/omap3530Linux/tools ⑥查看:ls ⑦然后输入命令:安装 /********************************************************* 郑州航空工业管理学院 嵌入式系统实验报告 (修订版) 20 – 20第学期 赵成,张克新编著 院系: 姓名: 专业: 学号: 电子通信工程系 2014年3月制 实验一ARM体系结构与编程方法 一、实验目的 了解ARM9 S3C2410A嵌入式微处理器芯片的体系结构,熟悉ARM微处理器的工作模式、指令状态、寄存器组及异常中断的概念,掌握ARM指令系统,能在ADS1.2 IDE中进行ARM汇编语言程序设计。 二、实验内容 1.ADS1.2 IDE的安装、环境配置及工程项目的建立; 2.ARM汇编语言程序设计(参考附录A): (1)两个寄存器值相加; (2)LDR、STR指令操作; (3)使用多寄存器传送指令进行数据复制; (4)使用查表法实现程序跳转; (5)使用BX指令切换处理器状态; (6)微处理器工作模式切换; 三、预备知识 了解ARM嵌入式微处理器芯片的体系结构及指令体系;熟悉汇编语言及可编程微处理器的程序设计方法。 四、实验设备 1. 硬件环境配置 计算机:Intel(R) Pentium(R) 及以上; 内存:1GB及以上; 实验设备:UP-NETARM2410-S嵌入式开发平台,J-Link V8仿真器; 2. 软件环境配置 操作系统:Microsoft Windows XP Professional Service Pack 2; 集成开发环境:ARM Developer Suite (ADS) 1.2。 五、实验分析 1.安装的ADS1.2 IDE中包括和两个软件组件。在ADS1.2中建立类型的工程,工程目标配置为;接着,还需要对工程进行、及链接器设置;最后,配置仿真环境为仿真方式。 2.写出ARM汇编语言的最简程序结构,然后在代码段中实现两个寄存器值的加法运算,给出运算部分相应指令的注释。 ; 文件名: 竭诚为您提供优质文档/双击可除 嵌入式实验报告心得 篇一:嵌入式系统各实验实验报告 嵌入式系统设计实验报告 班级:学号:姓名:成绩:指导教师: xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx 1.实验一 1.1实验名称 博创up-net3000实验台基本结构及使用方法 1.2实验目的 熟悉up-net3000实验平台的核心硬件电路和外设 通过操作系统自带的通讯软件超级终端,检验各个外设的工作状态 1.3实验环境 硬件:ARm嵌入式开发平台、用于ARm7TDmI的JTAg仿真器、pc机 pentium100以上。 软件:pc机操作系统windows、ADs1.2集成开发环境、 仿真器驱动程序、 超级终端通讯程序。 1.4实验内容及要求 一、内容 ①嵌入式系统开发流程概述 ②熟悉up-net3000实验平台的核心硬件电路和外设 ③ARmJTAg的安装与使用 ④通过操作系统自带的通讯软件超级终端,检验各个外设的工作状态 二、要求 通过本次课程对各个外设的了解,为今后各个接口实验打下基础。 1.5实验设计与实验步骤 一、JTAg的驱动程序的安装: 执行armJtag目录下armJtagsetup.exe程序,选择安装目录,安装JTAg软件。 二、通过通讯软件超级终端来检验外设的工作状态: ①运行windows系统下的超级终端(hyperTerminal)应用程序,新建一个通信终端。为所建超级终端取名为arm,可以为其选择第一个图标。单击“确定”按钮。 ②在接下来的对话框中选择ARm开发平台实际连接的pc 机串口(如com1),按确定按钮后出现属性对话框,设置通嵌入式系统综合实验一
嵌入式linux基本操作实验一的实验报告
嵌入式系统实验报告
嵌入式实验报告
嵌入式Linux实验三
嵌入式实验报告
嵌入式系统综合实验一
建立嵌入式linux开发环境实验
嵌入式系统实验实验报告
《嵌入式系统与开发》构建嵌入式Linux系统-实验报告
嵌入式实验3按键实验(中断方式)
嵌入式实验报告
嵌入式应用开发实验指导书 (1)
嵌入式linux实验指导书
嵌入式系统实验报告
嵌入式综合实验报告
嵌入式实验
(完整版)2014完整ARM嵌入式系统实验报告
嵌入式实验报告心得