嵌入式 西北农林科技大学 实验三
实验三:多线程应用程序设计
1.实验内容:
1.准备好交叉编译环境
2.编写并运行程序
2. 多线程应用程序设计
多线程程序作为一种多任务、并发的工作方式,有以下的优点:
1) 提高应用程序响应。这对图形界面的程序尤其有意义,当一个操作耗时很长时,整个系统都会等待这个操作,此时程序不会响应键盘、鼠标、菜单的操作,而使用多线程技术,将耗时长的操作(time consuming)置于一个新的线程,可以避免这种尴尬的情况。
2) 使多 CPU 系统更加有效。操作系统会保证当线程数不大于 CPU 数目时,不同的线程运行于不同的 CPU 上。
3) 改善程序结构。一个既长又复杂的进程可以考虑分为多个线程,成为几个独立或半独立的运行部分,这样的程序会利于理解和修改。
LIBC 中的 pthread 库提供了大量的 API 函数,为用户编写应用程序提供支持。
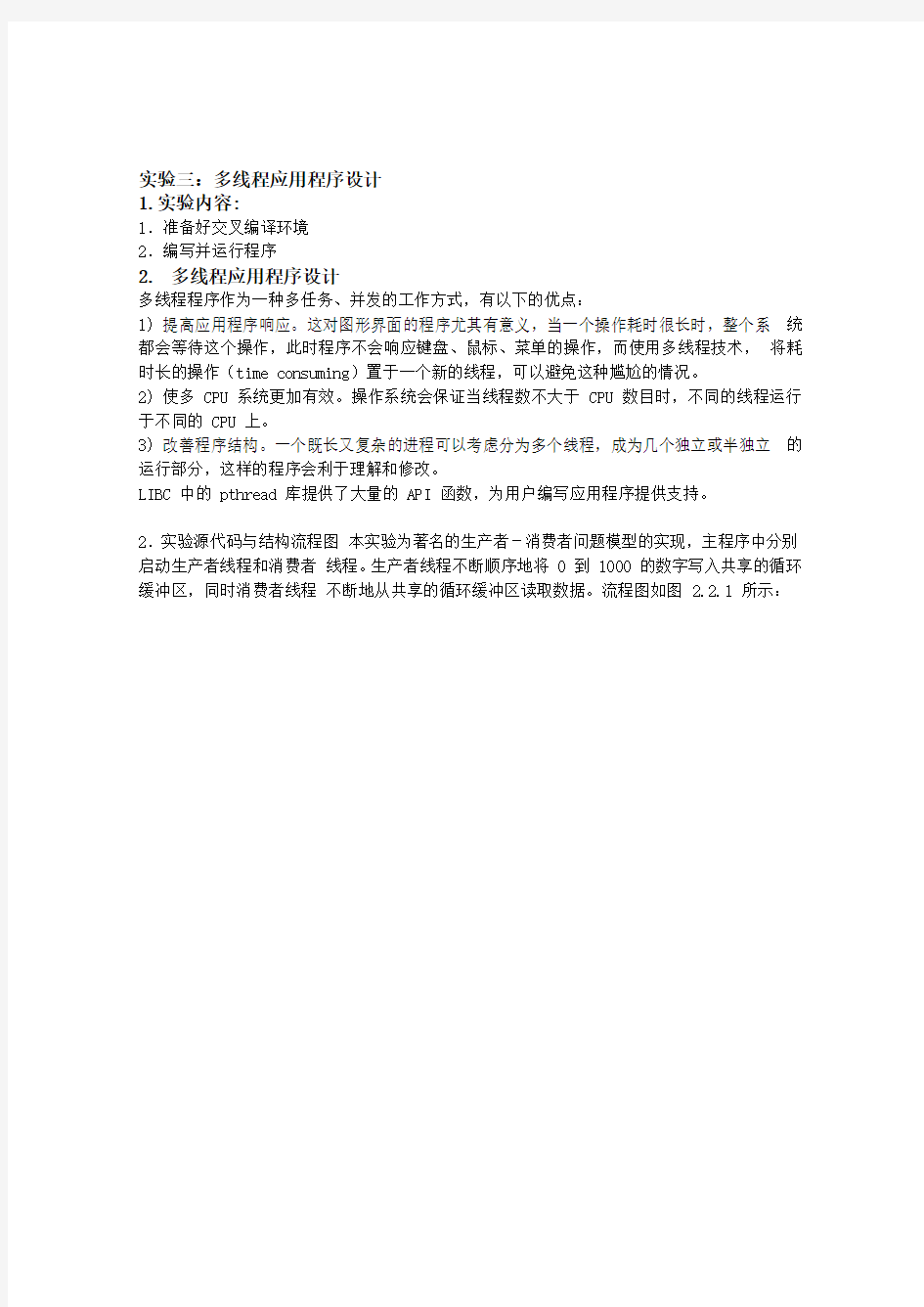
2.实验源代码与结构流程图本实验为著名的生产者-消费者问题模型的实现,主程序中分别启动生产者线程和消费者线程。生产者线程不断顺序地将 0 到 1000 的数字写入共享的循环缓冲区,同时消费者线程不断地从共享的循环缓冲区读取数据。流程图如图 2.2.1 所示:
本实验具体代码如下:
/************************************************ * The classic producer-consumer example.
* Illustrates mutexes and conditions.
* by Zou jian guo
* 2003-12-22
*************************************************/ #include
#include
#include
#include "pthread.h"
#define BUFFER_SIZE 16
/* 设置一个整数的圆形缓冲区 */
struct prodcons {
int buffer[BUFFER_SIZE]; /* 缓冲区数组 */ pthread_mutex_t lock; /* 互斥锁 */
int readpos, writepos; /* 读写的位置*/
pthread_cond_t notempty; /* 缓冲区非空信号 */
pthread_cond_t notfull; /*缓冲区非满信号 */
};
/*--------------------------------------------------------*/
/*初始化缓冲区*/
void init(struct prodcons * b)
{
pthread_mutex_init(&b->lock, NULL); pthread_cond_init(&b->notempty, NULL); pthread_cond_init(&b->notfull, NULL);
b->readpos = 0;
b->writepos = 0;
}
/*--------------------------------------------------------*/
/* 向缓冲区中写入一个整数*/
void put(struct prodcons * b, int data)
{
pthread_mutex_lock(&b->lock);
/*等待缓冲区非满*/
while ((b->writepos + 1) % BUFFER_SIZE == b->readpos) {
printf("wait for not full\n");
pthread_cond_wait(&b->notfull, &b->lock);
}
/*写数据并且指针前移*/
b->buffer[b->writepos] = data;
b->writepos++;
if (b->writepos >= BUFFER_SIZE) b->writepos = 0;
/*设置缓冲区非空信号*/
pthread_cond_signal(&b->notempty);
pthread_mutex_unlock(&b->lock);
}
/*--------------------------------------------------------*/ /*从缓冲区中读出一个整数 */
int get(struct prodcons * b)
{
int data;
pthread_mutex_lock(&b->lock);
/* 等待缓冲区非空*/
while (b->writepos == b->readpos) { printf("wait for not empty\n"); pthread_cond_wait(&b->notempty, &b->lock);
}
/* 读数据并且指针前移 */ data = b->buffer[b->readpos]; b->readpos++;
if (b->readpos >= BUFFER_SIZE) b->readpos = 0;
/* 设置缓冲区非满信号*/
pthread_cond_signal(&b->notfull);
pthread_mutex_unlock(&b->lock);
return data;
}
/*--------------------------------------------------------*/
#define OVER (-1)
struct prodcons buffer;
/*--------------------------------------------------------*/
void * producer(void * data)
{
int n;
for (n = 0; n < 1000; n++) { printf(" put-->%d\n", n); put(&buffer, n);
}
put(&buffer, OVER); printf("producer stopped!\n"); return NULL;
}
/*--------------------------------------------------------*/
void * consumer(void * data)
{
int d;
while (1) {
d = get(&buffer);
if (d == OVER ) break;
printf(" %d-->get\n", d);
}
printf("consumer stopped!\n");
return NULL;
}
/*--------------------------------------------------------*/
int main(void)
{
pthread_t th_a, th_b; void * retval; init(&buffer);
pthread_create(&th_a, NULL, producer, 0);
pthread_create(&th_b, NULL, consumer, 0);
/* 等待生产者和消费者结束*/ pthread_join(th_a, &retval); pthread_join(th_b, &retval); return 0;
}
3.主要函数分析:
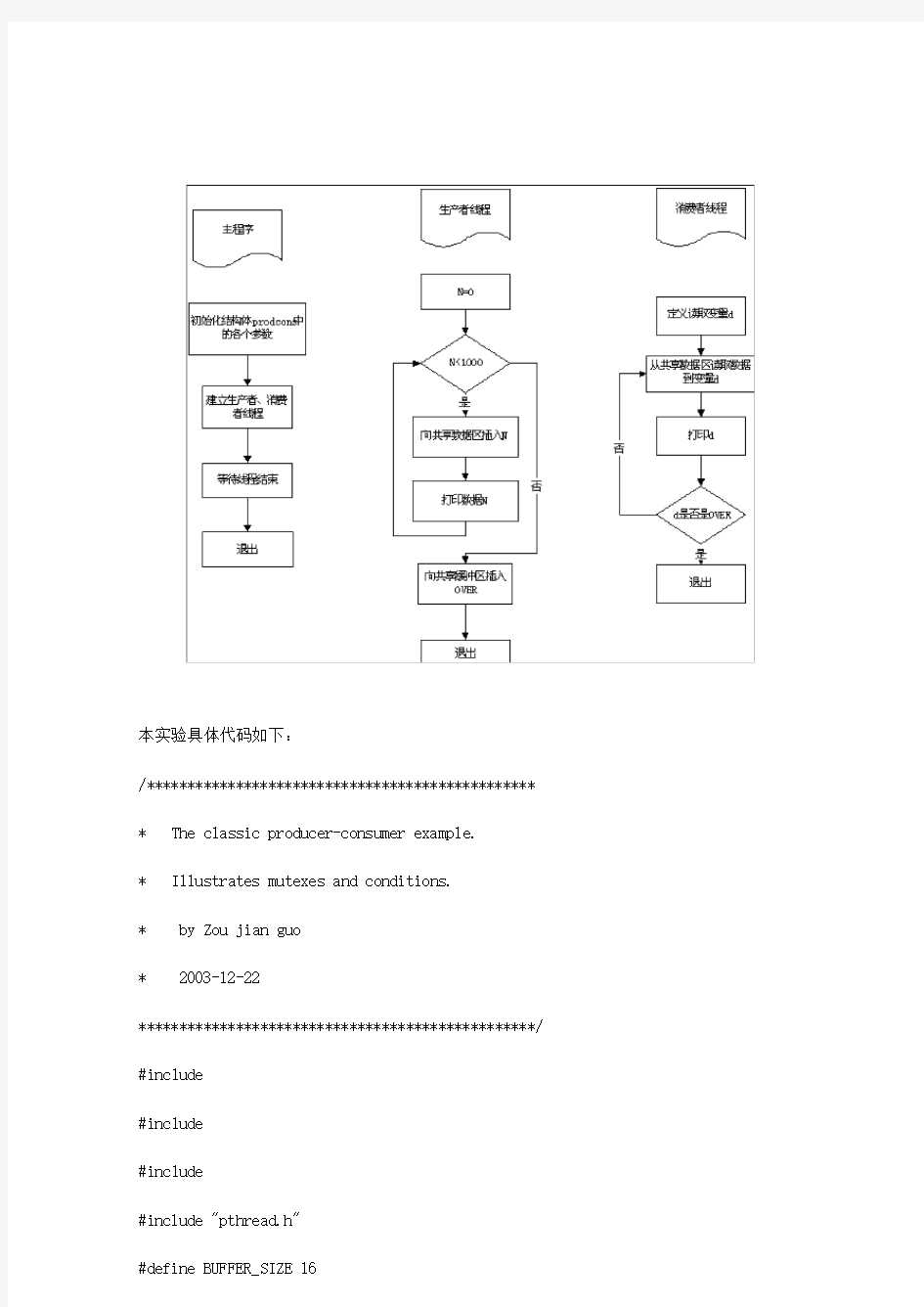
下面我们来看一下,生产者写入缓冲区和消费者从缓冲区读数的具体流程,生产者首先要获得互斥锁,并且判断写指针+1 后是否等于读指针,如果相等则进入等待状态,等候条件变量notfull;如果不等则向缓冲区中写一个整数,并且设置条件变量为 notempty,最后释放互斥锁。消费者线程与生产者线程类似,这里就不再过多介绍了。流程图如下:
s
图 2.2.2 生产消费流程图
?生产者写入共享的循环缓冲区函数 PUT
void put(struct prodcons * b, int data)
{
pthread_mutex_lock(&b->lock); //获取互斥锁
while ((b->writepos + 1) % BUFFER_SIZE == b->readpos) { //如果读写位置相同
pthread_cond_wait(&b->notfull, &b->lock);
//等待状态变量 b->notfull,不满则跳出阻塞
}
b->buffer[b->writepos] = data; //写入数据
b->writepos++;
if (b->writepos >= BUFFER_SIZE) b->writepos = 0; pthread_cond_signal(&b->notempty); //设置状态变量pthread_mutex_unlock(&b->lock); //释放互斥锁
}
?消费者读取共享的循环缓冲区函数 GET
int get(struct prodcons * b)
{
int data;
pthread_mutex_lock(&b->lock); //获取互斥锁
while (b->writepos == b->readpos) { //如果读写位置相同
pthread_cond_wait(&b->notempty, &b->lock);
//等待状态变量 b->notempty,不空则跳出阻塞。否则无数据可读。
}
data = b->buffer[b->readpos]; //读取数据
b->readpos++;
if (b->readpos >= BUFFER_SIZE) b->readpos = 0; pthread_cond_signal(&b->notfull);
//设置状态变量 pthread_mutex_unlock(&b->lock); //释放互斥锁
return data;
}
4.主要的多线程 API 在本程序的代码中大量的使用了线程函数,如 pthread_cond_signal、pthread_mutex_init、pthread_mutex_lock 等等,这些函数的作用是什么,在哪里定义的,我们将在下面的内容中为大家做一个简单的介绍,并且为其中比较重要的函数做一些详细的说明。
?线程创建函数:
int pthread_create (pthread_t * thread_id, const pthread_attr_t * attr,
void *(* start_routine) (void *),void * restrict arg)
?获得父进程 ID:
pthread_t pthread_self (void)
?测试两个线程号是否相同:
int pthread_equal (pthread_t thread1, pthread_t thread2)
?线程退出:
void pthread_exit (void * retval)
?等待指定的线程结束:
int pthread_join (pthread_t th, void ** thread_return)
?互斥量初始化:
pthread_mutex_init (pthread_mutex_t *, const pthread_mutexattr_t *) ?销毁互斥量:
int pthread_mutex_destroy
mutex)
(pthread_mutex_t *
?再试一次获得对互斥量的锁定(非阻塞):
int pthread_mutex_trylock (pthread_mutex_t * mutex)
?锁定互斥量(阻塞):
int pthread_mutex_lock (pthread_mutex_t * mutex)
?解锁互斥量:
int pthread_mutex_unlock (pthread_mutex_t * mutex)
?条件变量初始化:
int pthread_cond_init (pthread_cond_t * restrict cond,
const pthread_condattr_t * restrict cond_attr)
?销毁条件变量 COND:
int pthread_cond_destroy (pthread_cond_t * cond)
?唤醒线程等待条件变量:
int pthread_cond_signal (pthread_cond_t * cond)
?等待条件变量(阻塞):
int pthread_cond_wait (pthread_cond_t * restrict cond, pthread_mutex_t * restrict mutex)
?在指定的时间到达前等待条件变量:
int pthread_cond_timedwait (pthread_cond_t * restrict cond,
pthread_mutex_t * restrict mutex, const struct timespec * restrict abstime)
PTHREAD 库中还有大量的 API 函数,用户可以参考其他相关书籍。下面我们对几个比较重要
的函数做一下详细的说明:
pthread_create 线程创建函数
int pthread_create (pthread_t * thread_id, const pthread_attr_t * attr,
void *(* start_routine) (void *),void * restrict arg) 线程创建函数第一个
参数为指向线程标识符的指针,第二个参数用来设置线程属性,第三个参数是线程运行函数的
起始地址,最后一个参数是运行函数的参数。这里,我们的函数 thread 不需要参数,所以最
后一个参数设为空指针。第二个参数我们也设为空指针,这样将生成默认属性的线程。当创建
线程成功时,函数返回 0,若不为 0 则说明创建线程失败,常见的错误返回代码为 EAGAIN 和EINVAL。前者表示系统限制创建新的线程,例如线程数目过多了;后者表示第二个参数代表的
线程属性值非法。创建线程成功后,新创建的线程则运行参数三和参数四确定的函数,原来的
线程则继续运行下一行代码。
pthread_join 函数用来等待一个线程的结束。函数原型为:
int pthread_join (pthread_t th, void ** thread_return)
第一个参数为被等待的线程标识符,第二个参数为一个用户定义的指针,它可以用来存储
被等待线程的返回值。这个函数是一个线程阻塞的函数,调用它的函数将一直等待到被等
待的线程结束为止,当函数返回时,被等待线程的资源被收回。
pthread_exit 函数一个线程的结束有两种途径,一种是象我们上面的例子一样,函数结束了,
调用它的线程
也就结束了;另一种方式是通过函数 pthread_exit 来实现。它的函数原型为:
void pthread_exit (void * retval)
唯一的参数是函数的返回代码,只要 pthread_join 中的第二个参数 thread_return 不是NULL,这个值将被传递给 thread_return。最后要说明的是,一个线程不能被多个线程等待,
否则第一个接收到信号的线程成功返回,其余调用 pthread_join 的线程则返回错误代码ESRCH。下面我们来介绍有关条件变量的内容。使用互斥锁来可实现线程间数据的共享和通信,
互斥锁一个明显的缺点是它只有两种状态:锁定和非锁定。而条件变量通过允许线程阻塞和
等待另一个线程发送信号的方法弥补了互斥锁的不足,它常和互斥锁一起使用。使用时,条
件变量被用来阻塞一个线程,当条件不满足时,线程往往解开相应的互斥锁并等待条件发生
变化。一旦其它的某个线程改变了条件变量,它将通知相应的条件变量唤醒一个或多个正被
此条件变量阻塞的线程。这些线程将重新锁定互斥锁并重新测试条件是否满足。一般说来,
条件变量被用来进行线线程间的同步。
pthread_cond_init 函数
条件变量的结构为 pthread_cond_t,函数 pthread_cond_init()被用来初始化一个条件
变量。它的原型为:
int pthread_cond_init (pthread_cond_t * cond, const pthread_condattr_t * cond_attr)
其中cond 是一个指向结构pthread_cond_t 的指针,cond_attr 是一个指向结构pthread_condattr_t 的指针。结构 pthread_condattr_t 是条件变量的属性结构,和互斥锁
一样我们可以用它来设置条件变量是进程内可用还是进程间可用,默认值是 PTHREAD_ PROCESS_PRIVATE,即此条件变量被同一进程内的各个线程使用。注意初始化条件变量只有未
被使用时才能重新初始化或被释放。释放一个条件变量的函数为 pthread_cond_ destroy (pthread_cond_t cond)。
pthread_cond_wait 函数使线程阻塞在一个条件变量上。它的函数原型为: extern int pthread_cond_wait (pthread_cond_t *__restrict cond, pthread_mutex_t * restrict __mutex) 线程解开 mutex 指向的锁并被条件变量 cond 阻塞。线程可以被函数pthread_cond_signal
和函数 pthread_cond_broadcast 唤醒,但是要注意的是,条件变量只是起阻塞和唤醒线程的
作用,具体的判断条件还需用户给出,例如一个变量是否为 0 等等,这一点我们从后面的
例子中可以看到。线程被唤醒后,它将重新检查判断条件是否满足,如果还不满足,一般
说来线程应该仍阻塞在这里,被等待被下一次唤醒。这个过程一般用 while 语句实现。pthread_cond_timedwait 函数
另一个用来阻塞线程的函数是 pthread_cond_timedwait(),它的原型为:
extern int pthread_cond_timedwait P ((pthread_cond_t * cond,
pthread_mutex_t * mutex, __const struct timespec * abstime))
它比函数 pthread_cond_wait()多了一个时间参数,经历 abstime 段时间后,即使条件变量不满足,阻塞也被解除。
pthread_cond_signal 函数它的函数原型为:
extern int pthread_cond_signal (pthread_cond_t * cond)
它用来释放被阻塞在条件变量 cond 上的一个线程。多个线程阻塞在此条件变量上时,哪一个线程被唤醒是由线程的调度策略所决定的。要注意的是,必须用保护条件变量的互斥锁来保护这个函数,否则条件满足信号又可能在测试条件和调用 pthread_cond_wait 函数之间被发出,从而造成无限制的等待。
六、实验步骤
1、阅读源代及编译应用程序
进入 exp/basic/02_pthread 目录,使用 vi 编辑器或其他编辑器阅读理解源代码。运行 make 产生 pthread 可执行文件。
2、下载和调试
切换到 minicom 终端窗口,使用 NFS mount 开发主机的/arm2410cl 到/host 目录。
进入/host/exp/basic/pthread 目录,运行 pthread,观察运行结果的正确性。运行程序最后一部分结果如下:
wait for not empty put-->994
put-->995 put-->996 put-->997 put-->998 put-->999
producer stopped!
993-->get
994-->get
995-->get
996-->get
997-->get
998-->get
999-->get
嵌入式系统综合实验一
嵌入式系统综合实验一
学号: 装 订 线 实验报告 课程名称: 嵌入式系统设计 指导老师:马永昌 成绩:________________ 实验名称:综合实验一dht11和人体感应传感器 实验类型:验证型 同组学生姓名:孙凡原 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握字符设备驱动程序的基本结构和开发方法 2.掌握用户空间调用设备驱动的方法 3.掌握用户和内核的交互 二、实验内容和原理 专业:测控技术与仪器 姓名:颜睿
装订 线1.编写温湿度传感器DHT11驱动,传输打印温湿度信息 2.编写人体感应传感器驱动,控制LED灯亮灭 原理: 温湿度传感器DHT11: 1.引脚图 实际使用传感器没有NC引脚 2.数据采集 a.数据总时序 用户主机发送一次开始信号后,DHT11 从低功耗模式转换到高速模式,待主机开始信号结束后,DHT11 发送响应信号,送出40bit 的数据,幵触发一次信采集。
b.主机发送起始信号 连接DHT11的DATA引脚的I/O口输出低电平,且低 电平保持时间不能小于18ms,然后等待DHT11 作出 应答信号。 装 线 订 c.检测从机应答信号 DHT11 的DATA 引脚检测到外部信号有低电平时, 等待外部信号低电平结束,延迟后DHT11 的DATA 引脚处于输出状态,输出80 微秒的低电平作为应答信 号,紧接着输出80 微秒的高电平通知外设准备接收数 据。
装 订线 d.接收数据 (1)数据判定规则 位数据“0”的格式为:50 微秒的低电平和26-28 微秒的高电平,位数据“1”的格式为:50 微秒的低电平加70微秒的高电平。 接收数据时可以先等待低电平过去,即等待数据线拉高,再延时60us,因为60us大于28us且小于70us,再检测此时数据线是否为高,如果为高,则数据判定为1,否则为0。 (2)数据格式 一次传送40 位数据,高位先出 8bit 湿度整数数据+ 8bit 湿度小数数据+8bit 温度整
嵌入式系统及应用 实验大纲
《嵌入式系统及应用》课程实验 一、实验课程的性质、目的和任务 性质:《嵌入式系统及应用》课程是自动化专业的专业基础课程,本实验课是该课程教学大纲中规定必修的实验教学内容。 目的和任务:通过实验环节来巩固和加深学生对嵌入式系统的理解,使学生掌握MCS51单片机和ARM的基本原理和应用技术。通过熟悉MCS51开发环境和ARM集成开发环境,使学生掌握嵌入式系统开发的一般规律和方法。在集成开发环境下,进行系统功能程序的编写和调试的训练,掌握嵌入式系统软硬件调试的一般方法和系统设计的能力。 二、实验内容、学时分配及基本要求
三、考核及实验报告 (一)考核 本课程实验为非独立设课,实验成绩占课程总成绩的15%,综合评定实验成绩。(二)实验报告 实验报告应包括: 实验名称 实验目的 实验内容与要求 设计思路(如:分析、程序流程图等) 实验步骤 实验代码(含必要注释) 实验结果分析 实验小结(本题调试过程中遇到的问题和解决方法、注意事项、心得体会等)注:综合型实验需写出系统功能、设计过程 实验报告的要求: 实验报告以文本形式递交,实验报告要书写规范、文字简练、语句通顺、图表清晰。 四、主要仪器设备 硬件:微型计算机;嵌入式系统开发平台。 软件:Keil C51;ADT 五、教材及参考书 教材
[1] 高锋.单片微型计算机原理与接口技术(第二版).北京:科学出版社,2007 [2] 自编.嵌入式系统及应用 参考书 [1] 王田苗.嵌入式系统设计与实例开发.北京:清华大学出版社,2003 [2] 陈赜.ARM9 嵌入式技术及Linux高级实践教程.北京:北京航空航天大学出版社,2005 [3] 李忠民等.ARM嵌入式VxWorks实践教程.北京:北京航空航天大学出版社,2006
嵌入式系统实验报告
实验报告 课程名称:嵌入式系统 学院:信息工程 专业:电子信息工程 班级: 学生姓名: 学号: 指导教师: 开课时间:学年第一学期
实验名称:IO接口(跑马灯) 实验时间:11.16 实验成绩: 一、实验目的 1.掌握 STM32F4 基本IO口的使用。 2.使用STM32F4 IO口的推挽输出功能,利用GPIO_Set函数来设置完成对 IO 口的配置。 3.控制STM32F4的IO口输出,实现控制ALIENTEK 探索者STM32F4开发板上的两个LED实现一个类似跑马灯的效果。 二、实验原理 本次实验的关键在于如何控制STM32F4的IO口输出。IO主要由:MODER、OTYPER、OSPEEDR、PUPDR、ODR、IDR、AFRH和AFRL等8个寄存器的控制,并且本次实验主要用到IO口的推挽输出功能,利用GPIO_Set函数来设置,即可完成对IO口的配置。所以可以通过了开发板上的两个LED灯来实现一个类似跑马灯的效果。 三、实验资源 实验器材: 探索者STM32F4开发板 硬件资源: 1.DS0(连接在PF9) 2.DS1(连接在PF10) 四、实验内容及步骤 1.硬件设计 2.软件设计 (1)新建TEST工程,在该工程文件夹下面新建一个 HARDWARE文件夹,用来存储以后与硬件相关的代码。然后在 HARDWARE 文件夹下新建一个LED文件夹,用来存放与LED相关的代码。 (2)打开USER文件夹下的test.uvproj工程,新建一个文件,然后保存在 LED 文件夹下面,保存为 led.c,在led.c中输入相应的代码。
(3)采用 GPIO_Set 函数实现IO配置。LED_Init 调用 GPIO_Set 函数完成对 PF9 和 PF10 ALIENTEK 探索者 STM32F407 开发板教程 119 STM32F4 开发指南(寄存器版) 的模式配置,控制 LED0 和 LED1 输出 1(LED 灭),使两个 LED 的初始化。 (4)新建一个led.h文件,保存在 LED 文件夹下,在led.h中输入相应的代码。 3.下载验证 使用 flymcu 下载(也可以通过JLINK等仿真器下载),如图 1.2所示: 图1.2 运行结果如图1.3所示:
嵌入式Linux实验三
实验三:文件、目录及其操作命令 1实验目的 通过实验掌握如Linux操作系统的基本操作 2实验设备 硬件:PC机一台 软件:Windows98/XP/2000系统,VMware Workstation6.0,Red Hat Linux 3实验内容 (1)文件的复制、删除和移动命令:cp, rm, mv (2)Linux文件与目录 (3)目录命令:mkdir, rmdir, cd, pwd, ls (4)链接文件与ln (5)文件与目录的权限 4实验预习要求 仔细阅读参考书: 【1】鸟哥的Linux私房菜基础学习篇第三版,人民邮电出版社,鸟哥 【2】嵌入式Linux系统开发标准教程,人民邮电出版社,华清远见嵌入式培训中心 【3】嵌入式Linux应用程序开发标准教程,人民邮电出版社,华清远见嵌入式培训中心关于Linux文件与目录的部分。 5实验步骤 (1)熟悉Red Hat Enterprise Linux系统。 (2)根据实验重点内容测试。 6实验重点: (1)文件的复制、删除与移动:cp, rm, mv 要复制文件,请使用cp (copy) 这个命令即可。不过,cp 这个命令的用途不仅仅于此。除了单纯的复制之外,还可以建立连结文件(就是快捷方式),比对两文件的新旧而予以更新,以及复制整个目录等等的功能。至于移动目录与文件,则使用mv (move),这个命令也可以直接拿来作重命名(rename) 的操作!至于(移除)删除文件,使用rm (remove) 这个命令。
cp (复制文件或目录) [root@localhost ~]# cp [-adfilprsu] 源文件(source) 目标文件(destination) [root@localhost ~]# cp [options] source1 source2 source3 .... directory 选项与参数: -a:相当于-pdr 的意思,至于pdr 请参考下列说明;(常用) -d:若源文件为链接文件的属性(link file),则复制链接文件属性而非文件本身; -f :为强制(force)的意思,若目标文件已经存在则无法开启,则移除后再尝试一次; -i :若目标文件(destination)已经存在时,在覆盖时会先询问操作的进行(常用) -l :进行硬式连结(hard link)的连结文件建立,而非复制文件本身; -p:连同文件的属性一起复制过去,而非使用默认属性(备份常用); -r :递归持续复制,用于目录的复制行为;(常用) -s :复制成为符号链接文件(symbolic link),亦即快捷方式文件; -u :若destination 比source 旧,才更新destination ! 最后需要注意的,如果源文件有两个以上,则最后一个目标文件一定要是目录才行! 范例一:用root身份,将主目录下的.bashrc 复制到/temp 下,并更名为bashrc (~代表目前用户身份所在的主文件夹) [root@localhost ~]# cp ~/.bashrc /temp/bashrc [root@localhost ~]# cp -i ~/.bashrc /temp/bashrc cp: overwrite `/temp/bashrc'? n <==n不覆盖,y为覆盖 说明:重复作两次操作,由于/temp 下已经存在bashrc 了,加上-i 选项后,则在覆盖前会询问使用者是否确定!可以按下n 或者y 来二次确认。 范例二:将主目录下的.bashrc和.bash_history 复制到/temp下。 [root@localhost ~]cp ~/.bashrc ~/.bash_history /temp 可以将多个数据一次复制到同一目录中去,最后面一定是目录。 范例三:复制/etc/ 这个目录下的所有内容到/tmp 下 [root@www tmp]# cp /etc/ /tmp cp: omitting directory `/etc' <== 如果是目录则不能直接复制,要加上-r 的选项 [root@www tmp]# cp -r /etc/ /tmp -r 是可以复制目录,但是,文件与目录的权限可能会被改变。所以,也可以利用cp –a /etc /tmp 来下执行!尤其是在备份的情况下! rm (移除文件或目录) [root@localhost ~]# rm [-fir] 文件或目录 选项与参数:
嵌入式系统综合实验一
实验名称: 姓名: 学号: 装 订 线 P.1 实验报告 课程名称: 嵌入式系统设计 指导老师:马永昌 成绩:________________ 实验名称:综合实验一dht11和人体感应传感器 实验类型:验证型 同组学生姓名:孙凡原 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握字符设备驱动程序的基本结构和开发方法 2.掌握用户空间调用设备驱动的方法 3.掌握用户和内核的交互 二、实验内容和原理 1.编写温湿度传感器DHT11驱动,传输打印温湿度信息 2.编写人体感应传感器驱动,控制LED 灯亮灭 原理: 温湿度传感器DHT11: 1.引脚图 实际使用传感器没有NC 引脚 2.数据采集 a.数据总时序 用户主机发送一次开始信号后,DHT11 从低功耗模式转换到高速模式,待主机开始信号结束后,DHT11 发 专业:测控技术与仪器 姓名:颜睿 学号:3130103850 日期:2018.4.28 地点:创客空间
装订线送响应信号,送出40bit 的数据,幵触发一次信采集。 b.主机发送起始信号 连接DHT11的DATA引脚的I/O口输出低电平,且低电平保持时间不能小于18ms,然后等待DHT11 作出应答信号。 c.检测从机应答信号 DHT11 的DATA 引脚检测到外部信号有低电平时,等待外部信号低电平结束,延迟后DHT11 的DATA引脚处于输出状态,输出80 微秒的低电平作为应答信号,紧接着输出80 微秒的高电平通知外设准备接收数据。 d.接收数据 (1)数据判定规则 位数据“0”的格式为:50 微秒的低电平和26-28 微秒的高电平,位数据“1”的格式为:50 微秒的低电平加70微秒的高电平。 接收数据时可以先等待低电平过去,即等待数据线拉高,再延时60us,因为60us大于28us且小于70us,再检测此时数据线是否为高,如果为高,则数据判定为1,否则为0。
南邮嵌入式系统B实验报告2016年度-2017年度-2
_* 南京邮电大学通信学院 实验报告 实验名称:基于ADS开发环境的程序设计 嵌入式Linux交叉开发环境的建立 嵌入式Linux环境下的程序设计 多线程程序设计 课程名称嵌入式系统B 班级学号 姓名 开课学期2016/2017学年第2学期
实验一基于ADS开发环境的程序设计 一、实验目的 1、学习ADS开发环境的使用; 2、学习和掌握ADS环境下的汇编语言及C语言程序设计; 3、学习和掌握汇编语言及C语言的混合编程方法。 二、实验内容 1、编写和调试汇编语言程序; 2、编写和调试C语言程序; 3、编写和调试汇编语言及C语言的混合程序; 三、实验过程与结果 1、寄存器R0和R1中有两个正整数,求这两个数的最大公约数,结果保存在R3中。 代码1:使用C内嵌汇编 #include
printf("gcdnum:%d\n",a); return 0; } 代码2:使用纯汇编语言 AREA example1,CODE,readonly ENTRY MOV r0, #4 MOV r1, #9 start CMP r0, r1 SUBLT r1, r1, r0 SUBGT r0, r0, r1 BNE start MOV r3, r0 stop B stop END 2、寄存器R0 、R1和R2中有三个正整数,求出其中最大的数,并将其保存在R3中。 代码1:使用纯汇编语言 AREA examp,CODE,READONL Y ENTRY MOV R0,#10 MOV R1,#30 MOV R2,#20 Start CMP R0,R1 BLE lbl_a CMP R0,R2 MOVGT R3,R0 MOVLE R3,R2 B lbl_b lbl_a CMP R1,R2 MOVGT R3,R1 MOVLE R3,R2 lbl_b B . END 代码2:使用C内嵌汇编语言 #include
嵌入式系统实验实验报告
嵌入式系统实验实验报告 一、实验目的 1.基本实验
. Word 资料搭建PXA270嵌入式LINUX开发软硬件环境;安装LINUX操 作系统;安装与配置建立宿主机端交叉编译调试开发环境;配置宿主机 PC 机端的minicom(或超级终端)、TFTP服务、NFS服务,使宿主PC机与PXA270开发板可以通过串口通讯,并开通TFTP 和NFS服务。 2.人机接口 键盘驱动;LCD控制;触摸屏数据采集与控制实验; 3.应用实验 完成VGA显示;Web服务器实验;网络文件传输实验;多线程应用实验。 4.扩展应用实验 完成USB摄像头驱动与视频采集;GPS实验;GSM/GPRS通讯;视频播放移植;USB蓝牙设备无线通讯;NFS文件服务器;蓝牙视频文件服务器。 5.QT实验 完成基本嵌入式图形开发环境搭建;“Hello world!”QT初探;创建一个窗口并添加按钮;对象通信:Signal和Slot;菜单和快捷键;工具条和状态栏;鼠标和键盘事件;对话框;QT的绘图;俄罗斯方块;基于QT的GSM手机在嵌入式LINUX下的设计与实现。 二、实验内容 1.人机接口实验 实验十九键盘驱动实验 ?实验目的:矩阵键盘驱动的编写
?实验内容:矩阵键盘驱动的编写 ?作业要求:完成键盘加减乘除运算 ?实验作业源码及注释: #INCLUDE
嵌入式实验3按键实验(中断方式)
河南机电高等专科学校《嵌入式系统开发》课程实验报告 系部:电子通信工程系 班级:电信1## 姓名: ###### 学号: 120######
实验三按键实验(中断方式) 一.实验简介 在实验一的基础上,使用按键控制流水灯。 二.实验目的 熟练使用库函数操作GPIO,掌握中断配置和中断服务程序编写方法,掌握通过全局变量在中断服务程序和主程序间通信的方法。 三.实验内容 实现初始化GPIO,并配置中断,在中断服务程序中通过修改全局变量,达到控制流水灯速度及方向。 下载代码到目标板,查看运行结果。 四.实验设备 硬件部分:PC计算机(宿主机)、STM32实验板。 软件部分:PC机WINDOWS系统、MDK KEIL软件、ISP软件。 五.实验步骤 1在实验一代码的基础上,编写中断初始化代码 2在主程序中声明全局变量,用于和中断服务程序通信,编写完成主程序 3编写中断服务程序 4编译代码,下载到实验板 5.单步调试 6记录实验过程,撰写实验报告 六.实验结果及测试 中断方式的按键式实验,是通过配置外部中断寄存器和中断嵌套(NVIC)控制器来实现按键按下控制LED灯亮灭。通过按键中断打断主函数,执行LED1取反一次。 主函数初始化中断配置和LED配置,点亮LED1后一直等待中断,每中断一次,LED1取反一次。
int main(void) { LED_GPIO_Config(); LED1_ON; CLI(); SEI(); EXTI_PA0_Config(); while(1) { } } 中断嵌套控制寄存器的配置为中断嵌套分组1;抢占优先级0;响应优先级0 代码如下: void NVIC_Configuration(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } 外部中断按键的配置源码如下:配置PA0位中断线,并使能AFIO时钟void EXTI_PA0_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; EXTI_InitTypeDef EXTI_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO,ENABLE); NVIC_Configuration(); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); EXTI_InitStructure.EXTI_Line = EXTI_Line0; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure); }
嵌入式应用开发实验指导书 (1)
实验一基本接口实验(一) [实验设备] 1.JXARM9-2410教学实验箱 2.ADT1000仿真器和ADT IDE集成开发环境 3.串口、并口连接线 [实验目的] 1.掌握ARM的串行口工作原理,编程实现ARM的UART通讯; 2.掌握嵌入式系统中断的处理流程和ARM中断编程; 3.在ADT环境下如何建立工程,对工程进行正确的设置。添加相应文件(汇编、脚本、.c 源文件等) [实验内容一] 实现查询方式串口的收发功能。接收来自串口(通过超级终端)的字符并将接收到的字符发送到超级终端。 [预备知识] 1.了解ADT集成开发环境的基本功能 2.学习串口通讯的基本知识 3. 熟悉S3C2410串口有关的寄存器 [基础知识] 串行通信接口电路组成 1.可编程的串行接口芯片 2.波特率发生器 3.EIA与TTL电平转换器 4.地址译码电路 通信协议: 1.异步协议 2.同步协议 异步串行通讯 异步串行方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。 数据的各不同位可以分时使用同一传输通道,因此串行I/O 可以减少信号连线,最少用一对线即可进行。 接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。为了恢复发送的信息,双方必须协调工作。 在微型计算机中大量使用异步串行I/O 方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。 异步串行通信中的字符传送格式
开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0” 作为起始位,然后出现在通信线上的是字符的二进制编码数据。 每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。 最后是表示停止位的“1”信号,这个停止位可以约定持续1 位、1.5 位或2 位的时间宽度。 至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。 每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特率为110,150,300,600,1200,2400,4800,9600 等。 DB-25 DB-9引脚定义 DB-25 DB-9引脚说明
嵌入式系统实验报告
嵌入式系统实验报告文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
大连理工大学 本科实验报告 课程名称:嵌入式系统实验 学院(系):电子信息与电气工程学部 专业:自动化 班级: 0804 学号: 学生姓名:何韬 2011年 11月 18日 大连理工大学实验报告 学院(系):电信专业:自动化班级: 0804 姓名:何韬学号:组: ___ 实验时间: 2011-11-12 实验室: d108 实验台: 指导教师签字:成绩: 实验二ARM的串行口实验 一、实验目的和要求 见预习报告 二、实验原理和内容 见预习报告 三、主要仪器设备
硬件:ARM嵌入式开发平台、用于ARM7TDMI 的JTAG 仿真器、PC机Pentium100 以上、串口线。 软件:PC 机操作系统win98、Win2000 或WinXP 、ARM SDT 或集成开发环境、仿真器驱动程序、超级终端通讯程序。 四、实验步骤 见预习报告 五、核心代码 在主函数中实现将从串口0接收到的数据发送到串口0() int main(void) { char c1[1]; char err; ARMTargetInit(); 通过调用OSTaskCreate()或OSTaskCreateExt()创建至少一个任务; . OSStart(); /ucos-ii/" /* uC/OS interface */ #include "../ucos-ii/add/" #include "../inc/" #include "../inc/sys/" #include "../src/gui/" #include <> #include <>
嵌入式系统设计实验四
实验报告 课程名称: 嵌入式系统设计 指导老师:马永昌 成绩:________________ 实验名称:实验四C 语言裸机编程 实验类型:验证型 同组学生姓名:__孙凡原_______ 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 ? 初步了解C 运行库 ? 初步了解gcc arm 常用编译选项 ? 了解ARM 中断处理过程 二、实验内容和原理 ? 编写C 裸机代码实现跑马灯,通过控制Timer 中断实现 ? 通过控制uart 串口进行调试打印 三、主要仪器设备 树莓派、PC 机 四、操作方法和实验步骤 1 通过定时器产生中断,控制gpio ,实现跑马灯 2 控制uart 控制器,产生调试打印。 五、实验数据记录和处理 1.主程序arm.c 注释 //包含头文件 #include
嵌入式实验
Part1------安装arm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz 1、通过Vmware的共享文件加载压缩文件 arm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz ①首先配置Vmware加载文件所在位置。 ②点击下方的Add按钮,添加文件所在文件夹,一路点击,直至完成,如图所示 2.
①进入linux系统,进入到挂载目录下 ●cd /mnt ②查看挂载目录mnt文件夹下所有目录,看是否有hgfs目录 ●ls ③进入到hgfs下查看,看是否有共享的的D盘 ●cd hgfs ④查看hgfs下文件夹的下的目录 ●Ls /*******************************************************************/ 进入到hgfs下查看,若能查看到对应目录则表示成功,如查看不到请运行下面命令 输入命令 ●cd /usr/bin ●./vmware-config-tools.pl 先后输入Y和N安装虚拟机工具即可 /****************************************************************************/ ⑤进入到挂载目录下的目标文件位置 (即一直进入到arm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz所在的目录) ●cd D/omap3530Linux/tools ⑥查看:ls ⑦然后输入命令:安装 /*********************************************************
《单片机系统设计》实验报告
短学期实验报告 (单片机系统设计) 题目: 专业: 指导教师: 学生姓名: 学号: 完成时间: 成绩:
基于单片机的交流电压表设计 目录 1系统的设计要求 (2) 2系统的硬件要求 (2) 2.1真有效值转换电路的分析 (2) 2.2放大电路的设计 (3) 2.3A/D转换电路的设计 (3) 2.4单片机电路的分析 (4) 2.5显示电路 (4) 3 软件设计 (5) 3.1 软件的总流程图 (5) 3.2 初始化定义与定时器初始化流程图 (5) 3.3 A/D转换流程图 (6) 3.4 数据处理流程图 (6) 3.5 数据显示流程图 (7) 4 调试 (7) 4.1 调试准备 (7) 4.2 关键点调试 (7) 4.3 测试结果 (8) 4.4 误差分析 (8) 5结束语 (8) 5.1 总结 (9) 5.2 展望 (9) 附录1 总原理图 (10) 附录2 程序 (10) 附录3 实物图 (14)
基于单片机的交流电压表设计 ****学院 ****专业 姓名 指导老师:******* 1 设计要求 (1)运用单片机实现真有效值的检测和显示。 (2)数据采集使用中断方式,显示内容为有效值与峰值交替进行。 2 硬件设计 本系统是完成一个真有效值的测量和显示,利用AD737将交流电转换成交流电压的有效值,用ADC0804实现模数转换,再通过单片机用数码管来显示。系统原理框图如图2-1所示。系统框图由真有效值转换电路、放大电路、A/D 转换电路、单片机电路、数码管显示电路五部分。 图2-1 原理框图 2.1 真有效值转换电路 真有效值转换电路主要是利用AD737芯片来实现真有效值直流变换的,即将输入的交流信号转换成直流信号的有效值,其原理图如图2-2所示。 图2-2 真有效值转换电路 由于AD737最大输入电压为200mV, 所以需要接两个二极管来限制输入电压,起到限幅的作用。如图中D1、D2,由IN4148构成,电容C6是耦合电容,电阻R1是限流电阻。 2.2 放大电路设计 放大电路主要是利用运放uA741来进行放大,电路原理图如图2-3所示。 A/D 转换 单片机 电路 显示 电路 转换 电路 交流 信号 放大 电路
嵌入式实验报告心得
竭诚为您提供优质文档/双击可除 嵌入式实验报告心得 篇一:嵌入式系统各实验实验报告 嵌入式系统设计实验报告 班级:学号:姓名:成绩:指导教师: xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx 1.实验一 1.1实验名称 博创up-net3000实验台基本结构及使用方法 1.2实验目的 熟悉up-net3000实验平台的核心硬件电路和外设 通过操作系统自带的通讯软件超级终端,检验各个外设的工作状态 1.3实验环境 硬件:ARm嵌入式开发平台、用于ARm7TDmI的JTAg仿真器、pc机 pentium100以上。 软件:pc机操作系统windows、ADs1.2集成开发环境、
仿真器驱动程序、 超级终端通讯程序。 1.4实验内容及要求 一、内容 ①嵌入式系统开发流程概述 ②熟悉up-net3000实验平台的核心硬件电路和外设 ③ARmJTAg的安装与使用 ④通过操作系统自带的通讯软件超级终端,检验各个外设的工作状态 二、要求 通过本次课程对各个外设的了解,为今后各个接口实验打下基础。 1.5实验设计与实验步骤 一、JTAg的驱动程序的安装: 执行armJtag目录下armJtagsetup.exe程序,选择安装目录,安装JTAg软件。 二、通过通讯软件超级终端来检验外设的工作状态: ①运行windows系统下的超级终端(hyperTerminal)应用程序,新建一个通信终端。为所建超级终端取名为arm,可以为其选择第一个图标。单击“确定”按钮。 ②在接下来的对话框中选择ARm开发平台实际连接的pc 机串口(如com1),按确定按钮后出现属性对话框,设置通
嵌入式系统设计性实验报告
嵌入式系统设计性实验报告 水温控制系统 院别:控制工程学院 专业:自动 学号:5090633 姓名:邱飒飒 指导老师:孙文义 2012年6月8日
嵌入式系统设计性实验报告 作者:邱飒飒班级:50906 学号:5090633 摘要:在工业生产中,电流、电压、温度、压力、流量、流速和开关量都是常用的主要被控参数。其中,温度控制也越来越重要。在工业生产的很多领域中,人们都需要对各类加热炉、热处理炉、反应炉和锅炉中的温度进行检测和控制。采用单片机对温度进行控制不仅具有控制方便、简单和灵活性大等优点,而且可以大幅度提高被控温度的技术指标,从而大大的提高产品的质量和数量。因此,单片机对温度的控制问题是工业生产中经常会遇到的控制问题.该实验设计基于飞思卡尔MC9S12DG128开发板平台,根据实验任务要求,完成了基于单片机的水温自动控制系统的设计该实验设计基于飞思卡尔MC9S12DG128开发板平台,根据实验任务要求,完成了水温自动控制系统的设计。 关键字:水温控制单片机MC9S12DG128 一、系统设计的功能 1.1 水温控制系统设计任务和要求 该系统为一实验系统,系统设计任务: 设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿。 水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。同时满足以下要求: (1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。 (2)环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。 (3)用十进制数码管显示水的实际温度保留一位小数。 (4)采用适当的控制方法(如数字PID),当设定温度突变(由40℃提高到60℃)时,减小系统的调节时间和超调量。 (5)温度控制的静态误差≤0.2℃。 (6)从串口输出水温随时间变化的数值。 1.2 水温控制系统部分 水温控制系统是一个过程控制系统,组成框图如下所示,有控制器、执行器、被控对象及其反馈作用的测量变送组成。 图1 控制系统框图 1.3 系统总体功能分析 本系统是一个简单的单回路控制系统,为了实现温度的测量及自动控制,根据任务要求及要求,系统由单片机系统,前向通道,后向通道,及人机通话四个模块构成。总体框图如图2 所示。
嵌入式实验
实验一、dip_switch 按键实验 一、实验目的 1.了解DIP_SWITCH 的用处。 2.了解C6748 连接的控制DIP_SWITCH 方法。 3.熟悉CCS 操作,学会使用工程,学习编译和下载、运行程序。 二、实验设备 1.PC 兼容机一台;操作系统为WindowsXP 或者以上版本。 2.ICETEK-C6748-AE 实验箱一台。如无实验箱则配备ICETEK-XDS100v2+仿真器和ICETEK–C6748-A,+5V 电源一只。 3.USB 连接电缆一条。 三、实验原理 ICETEK-C6748-AE 通过GPIO 来控制拨码开关的,通过对对应的GPIO 引脚的读,可以知道拨码开关的状态,再通过对GPIO 控制led 的显示,把拨码开关的状态显示出来。 2.实验程序流程图:
四、实验步骤 1.实验准备: (1) 连接实验箱: (2) 准备进行硬件仿真: (3) 检查ICETEK- C6748-KB 板上跳线选择器U15 为0000。 2.启动Code Composer Studio v5 3.打开工程文件: 工程文件目录为:C:\ICETEK\ICETEK-C6748-AE\Lab0301-Led_dip 打开源程序LED.c 阅读程序,理解程序内容。 4.点击图标,ccs 会自动连接,编译和下载程序。 5.运行程序,观察结果。 6.退出CCS。 五、实验结果 [C674X_0] ------------------------------------------------------------ C6748-A LED and Dip Switch Test Test Description ---------------- this code will begin by flashing the leds, then it will sit in a forever loop checking the dip switches. when a change in the dip switches is detected, a message will be printed to stdout and an led will be toggled. ------------------------------------------------------------ Initialize the Required BSL Modules ----------------------------------- Execute Test ------------ flash led patterns loop forever printing dips switch status and setting leds based on dips 拨动相应的拨码开关 SW1,对应的 led 灯会跟着亮灭 六、问题与思考 拨码开关用到的gpio 口是与EMIFA 数据线复用的,应用时注意避免硬件间的冲突。七、实验心得 通过这次实验我们了解了dip_switch 按键的使用方法,熟悉了CCS 操作,了解了C6748 连接的控制DIP_SWITCH 方法。 实验二.RTC 实验 一、实验目的 1.了解RTC 的用途。 2.了解C6748 连接的控制的访问RTC 的方法。 3.熟悉CCS 操作,学会使用工程,学习编译和下载、运行程序。 二、实验设备 1.PC 兼容机一台;操作系统为WindowsXP 或者以上版本。 2.ICETEK-C6748-AE 实验箱一台。如无实验箱则配备ICETEK-XDS100v2+仿真器和ICETEK–C6748-A,+5V 电源一只。 3.USB 连接电缆一条。
嵌入式系统实验报告
实验一系统认识实验 一、实验目的 学习Dais软件的操作,熟悉程序编写的操作步骤及调试方法。 二、实验设备 PC计算机一台,Dais-52PRO+或Dais-PRO163C实验系统一套。 三、实验内容 编写程序,将80h~8Fh共16 个数写入单片机内部RAM 的30h~3Fh空间。 四、实验步骤 1.运行Dais软件,进入集成开发环境,软件弹出设置通信端口对话框(如图2-1-1), 请确保实验装置与PC正确连接,并已打开实验装置电源,使其进入在待命状态。 这里选择与实验装置实际相连的通信端口,并单击“确定”。如通信正确则进入Dais 软件主界面,否则弹出“通信出错”的信息框(如图2-1-2),请检查后重试。 图2-1-1设置通信端口对话框图2-1-2通信错误信息框 2.通信成功后,单击菜单栏“设置”→“仿真模式”项打开对话框,选择需要设置型 号、程序/数据空间。这里我们将型号设置为“MCS-51实验系统”,外部数据区 设置为“系统RAM”,用户程序区设置为“片外(EA=0)”,如图2-1-3所示,最 后单击“确定”按钮保存设置。
图2-1-3设置工作方式对话框 3.工作方式设置完毕后,单击菜单栏“文件”→“新建”项或按Ctrl+N组合键(建 议单击工具栏“”按钮)来新建一个文件,软件会出现一个空白的文件编辑窗口。 4.在新窗口中输入程序代码(A51\2_1.ASM): ORG 0000H LJMP MAIN ORG 0100H MAIN: MOV R1,#30H ;片内RAM首地址 MOV A,#80H ;写入数据初值 MOV R7,#16 ;循环变量 LOOP1: MOV @R1,A ;写数据到片内RAM INC R1 ;地址增量 INC A ;数据+1 DJNZ R7,LOOP1 ;循环变量-1,不为0继续 SJMP $ ;结束 END 5.单击菜单栏“文件”→“保存”项(建议单击工具栏“”按钮)保存文件。若 是新建的文件尚未命名,系统会弹出文件保存对话框(如图2-1-4),提示用户选择文件保存的路径和文件名,再单击“保存”按钮。
嵌入式实验3
CVT6410定时器制作精确延时来控制LED 一、实验目的 1. 熟悉RVDS 2.2开发环境。 2. 掌握S3C6410内部相关寄存器的操作方法,最终实现对外部设备的控制。 3. 熟悉在ARM裸机环境下的C语言编程。 4. 熟悉ARMv6的VIC控制以及S3C6410的timer控制器。 二、实验内容 建立RVDS开发环境。 利用定时器实现对开发板上发光二极管LED的跑马灯控制。 三、实验设备 1. 硬件:CVT6410教学实验箱、PC机; 2. 软件:PC机操作系统Windows 98(2000、XP) +RVDS开发环境。 3. JLINK仿真器。 四、基础知识 从电路图上我们可以看到,发光二极管LED的一端连接到了ARM 的GPIO,另一端经过一个限流电阻接电源VCC3。当GPIO口为低电平时,LED两端产生电压降,这时LED有电流通过并发光。反之当GPIO为高电平时,LED将熄灭。注意亮灭之间要有一定的延时,以
便人眼能够区分出来。 实验相应寄存器 端口配置寄存器 端口数据寄存器 端口上拉电路使能寄存器 实验电路 发光二极管LED的驱动电路参见“3.1 CVT6410 GPIO控制LED”的实验电路。 实验程序 init.s:
IMPORT Main AREA |C$$code|, CODE, READONLY global start start bl Main END Main.c //程序初始化 #define PCLK 66000000 //for S3C6410 66MHZ #define HCLK 133000000 //for S3C6410 133MHZ #define rTCFG0 (*(volatile unsigned *)(0x7F006000)) #define rTCFG1 (*(volatile unsigned *)(0x7F006004)) #define rTCON (*(volatile unsigned *)(0x7F006008)) #define rTCNTB0 (*(volatile unsigned *)(0x7F00600C)) #define rTCMPB0 (*(volatile unsigned *)(0x7F006010)) #define rTCNTO0 (*(volatile unsigned *)(0x7F006014)) #define rTCNTB1 (*(volatile unsigned *)(0x7F006018)) #define rTCMPB1 (*(volatile unsigned *)(0x7F00601c))