基于印刷机滚筒的模态分析
基于ANSYS的滚筒模态分析
δ W =
∫
v
{δ d} { F} v dv +
T
∫
s
{δ d} { F} s ds + {δ q} { p} v{δ d} ∫
v T
T
T
印刷机三滚筒的工作性能与其动态性能密切相关 。在印 刷过程中 ,三滚筒两两接触 ,产生振动激励 , 辐射出噪声 ,其情 况非常复杂 。其中橡皮滚筒悬浮在 3 个支撑点上 ,与另外 2 个 滚筒相比 ,抗振性能最差 。因此对三点悬浮式橡皮滚筒进行动
v T
¨
节点坐标变换矩阵 : γco s β co s
[λ ] =
γ sin
0
γsin β co s γco s β - sin β co s
γco s β co s γ - sin β sin
3 ) 单元矩阵组集成整体矩阵 获得各单元在总体坐标系中的质量矩阵 、 刚度矩阵 、 阻尼 矩阵 、 节点力列阵 、 激扰力列阵后 ,便可按照一定原则将其进行 组集 ,得到整体结构的总质量矩阵 、 刚度矩阵 、 阻尼矩阵 、 节点 力列阵和激扰力列阵 ,从而得到整体结构的运动方程 。
{ d} = [N ] { q} {ε} = [B ] { q} { d} = [N ] { q}
ε} = [B ] {δ {δ d} = [N ] {δ q} {δ q} { d } = [N ] { q} 带入式 ( 3 ) ,并整理得 :
[B ] ∫
v T
¨
¨
析结构体进行规划 ,即对结构体上与分析目标关系不大的部分 进行简化 ,以缩小求解规模 [ 5 ] 。在建立实体模型时 , 进行了以 下简化 :
[M { q} + [ C ] { q} + [ K ] { q} = { p}
滚筒洗衣机箱体计算模态与试验模态分析
滚筒洗衣机箱体计算模态与试验模态分析苏高峰【摘要】以某型号滚筒洗衣机箱体为研究对象,采用有限元数值计算和试验研究相结合的方法,获得箱体的固有频率和固有振型,并以试验模态分析的结果修正有限元模型,在此基础上初步探讨了箱体减振降噪的可行性措施。
% This paper focuses on the calculating modal & testing modal analysis on the cabinet of front-loading washing machine. Calculating modal obtained from FEA analysis is corrected by testing modal. At last,some measures for reducing the vibration & acoustics on cabinet of washing machine are put on.【期刊名称】《机电工程技术》【年(卷),期】2012(000)012【总页数】3页(P59-61)【关键词】计算模态;试验模态;滚筒洗衣机【作者】苏高峰【作者单位】无锡小天鹅股份有限公司, 江苏无锡 214028【正文语种】中文【中图分类】TP3910 引言模态分析是分析结构振动特性的一种有效方法,在各种大小型工程结构中得到广泛的应用。
根据研究手段和方法不同,模态分析可分为计算模态分析和试验模态分析两类[1]。
分析过程如果是通过有限元分析的方法取得的,则称为计算模态分析;通过试验采集系统的输入与输出信号,经过参数识别获得模态参数,称为试验模态分析。
滚筒洗衣机在工作时,箱体受到来自筒部撞击及电机的振动载荷激励,其动态特性直接影响洗衣机的整体性能,对洗衣机箱体进行模态分析有助于识别箱体的动态性能,得到的相关数据对机箱结构的改进、减振降噪以及洗衣机整机多体动力学分析与仿真都具有一定的指导意义[2]。
基于Nastran的拉丝机卷筒模态分析
收 稿日期:2 1 - 7 7 0 1 0 -1 基 金项目:江苏省教育厅产业化推进项 目 (H0 —4 J 83 );科技部科技人 员服务企业项 目 (0 9 T 10 9 20 G C 0 2 )
作者简介:潘洋 字 (9 9 1 6 一),男 ,副教授 ,主要从事C D/ A C E等方面的研究。 A C M/ A 第3 卷 第 1期 3 1 2 1 —1 ( ) [ 1 1 0 1 1 下 1 3
l
22 单 元特征 尺 寸的确 定 .
. 似 8
在进行卷筒模态的有限元计算中 , 选用高次单 元划 分有 限元 网格 ,难 度及 工作 量较 大 , 以往通 常
的做 法是 进行 结构 的大 量 简化 , 是简 化 的方式 及 但
程 度 对计 算结 果 的影 响很大 , 很难保 证 所得 结果 的
摘
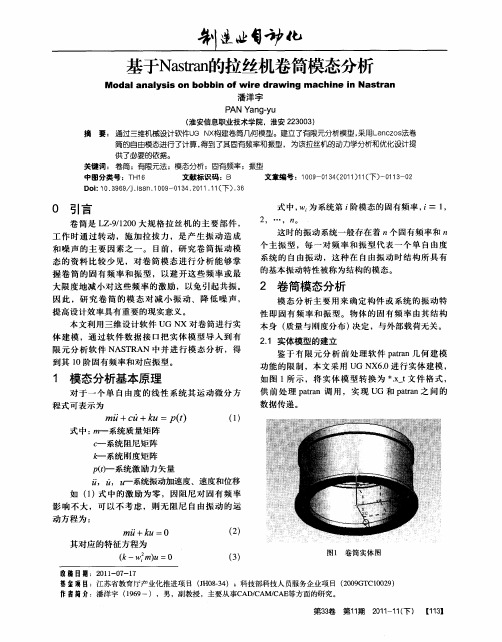
( 安信 息职 业技术学院 ,淮安 2 3 0 ) 淮 2 0 3 要 : 通过三维机械设计软件u X G N 构建卷筒几何模型 。建立了有限元分析模型 , 采用L nz s ac o 法卷
筒的自由模态进行 了计算 , 得到 了其 固有频率和振型 ,为该拉丝机的动力学分析和优化设计提
供了必要的依据。 关键词 : 卷筒 ;有限元法 ;模态分析 ;固有频率 ;振型
一
5 2 17 74 19 3 4 8
69 . 9 29 75. 0 91
3 334 0 6 15 l 6 6
6 8 93 76. 0 01
2 5 52 44 3 13 14
67. 9 88 74 0O
阶 频 率( ) Hz
二阶频率( ) Hz
三阶频 率( ) Hz 计算时 间 () s
滚筒洗衣机箱体振动特性及模态分析_胡效东

模态之外的前3阶模态,箱体模态振型和模态固有 频率如图6所示。
图4 表1 阶数 固有频率/Hz
稳态识别图 试验模态固有频率 2阶 3阶 4阶 5阶 图5 箱体有限元模型
1阶
31.130 53.772 67.590 73.039 80.788
前5阶模态固有频率如表1所示。由实验得到的 模态振型图看出随着模态阶次增大,两侧面的振动 幅度增大,在第3阶时达到最大,且这一阶的箱体 发生扭转变形,在侧板、后盖与上盖连接处变形较 明显。在第4阶变形最小,其他阶箱体振型几乎集中 在中部,说明箱体壁中部是易发生共振的地方,设计 箱体时应注重这部分的刚度和结构的设计。
∑
由上式可知,若知道箱体的传递函数,则可 以识别 ϕ lr, ϕ pr ,从而得出箱体的模态参数。
2 箱体实验模态分析
2.1 洗衣机箱体介绍 滚筒洗衣机箱体长600mm、宽480mm、高 800mm,箱体实体模型如图1所示。箱体各部件通 过焊接组成整体,且表面经过涂装处理。本箱体 的材料为Q235-A钢板,厚度为0.8mm,其材料属性 为:弹性模量E=2.07×1011Pa,密度ρ=7800kg/m3, 泊松比V=0.3。
滚筒洗衣机箱体振动特性及模态分析
Vibration characteristic and modal analysis of the cabinet of drum washing machine 胡效东1,闵迎亚1,刘学亮2,刘宪福1 HU Xiao-dong1,MIN Ying-ya1,LIU Xue-liang2,LIU Xian-fu1
㑇⪙ ゴ㯺Ⱙ ⪌ⶱ㡘
图2
〛 㼅
⮈尢⳦⫔㡘 ⮈尢⳦⫔㡘
测试原理图
基于有限元的滚筒洗衣机零部件改进设计

基于有限元的滚筒洗衣机零部件改进设计摘要:将试验模态和有限元模型的模态相结合,对自动滚筒洗衣机零部件进行了动力学分析。
首先,利用 Eingeer软件对机身进行了3D立体建模。
在此基础上,将其输入到 ANSYS软件中,对其进行了网格分析,并建立了其有限元模型。
将理论模型和试验模型进行了对比,得到了很好的结果。
在此基础上,通过对其零部件的固有性能进行了分析,为进一步改进滚筒式洗衣机的零部件振动性能奠定了基础。
关键词:滚筒洗衣机零部件;机箱;模态试验;模态分析;有限元;引言:当前,模态分析主要采用试验与有限元数值模拟的手段,通常通过试验模态分析的结果来修改有限元模型,从而获得更准确地包含结构参数的有限元模型。
本论文采用有限元理论和试验模态相结合的方法,对滚筒式洗衣机零部件进行了全面的模态分析,并根据试验结果,对此种洗衣机机箱的振动模式特征进行了研究,为其结构的改善提供了一定的参考。
1洗衣机机箱的有限元模态分析本论文将有限元方法应用于理论模态分析,其基本思路为:先在Pro/Engineer中构建全自动滚筒洗衣机零件机箱的三维实体模型,然后将其输入到有限元软件 ANSYS中,对其进行单元划分、边界条件设定,最后进行模态计算。
1.1有限元模型的建立在此基础上,利用 Pro/E软件对滚筒式洗衣机零件进行了三维建模。
因为洗衣机的机箱是一种箱式的构件,它的构造中存在着许多的加强筋、凸台和孔洞等,所以在进行机身的3D建模时,既不可能,也不需要将每一个细节都考虑进去。
为此,在建立模型时,对其作了适当的简化,省略了进、排水管道孔和螺栓孔,并将其输入到 ANSYS中进行了数值模拟。
由于在实际工作中,箱体各表面多为弯扭变形,所以使用结点Shell63板-壳单元能较好地模拟箱体各表面的受力与变形情况。
因为在洗衣机机箱的实体模型中,含有大量的圆形孔洞和直角形,所以要在运算速度与运算精度之间取得平衡,需要对网格的数目与单元的形状加以控制:在 Meshtool中,使用sizecontrol命令,来确定机箱的各个不同表面上的单元数目;在 Mesh areas中,采用了自由网格划分,因为自由网格对于单元形状没有限制,而且不需要有特定规则的面或线,这样可以有效地减少了单元数目,最终得到机箱的单元总数为44757个。
基于有限元对印刷机滚筒的仿真分析

Value Engineering1印刷滚筒刚度理论分析为了减少回转中运动惯性和变形,应尽量减小印刷滚筒的质量,因此,在进行印刷装置的设计时候,在保证印刷装置强度和刚度的条件下,应尽量减小滚筒的壁厚,使金属材料用量最小。
可见,滚筒的刚度计算实质上就是确定滚筒的挠度不超过允许的最小壁厚。
在进行扰度计算时候,首先要对滚筒进行受力分析,即确定滚筒所受的外力及滚筒轴承的支反力。
滚筒所受外力包括印刷压力和滚筒齿轮传动所产生的力,但是后者所产生的滚筒扰度比前者所引起的滚筒变形要小得多。
因此,在计算滚筒扰度时,可以忽略滚筒齿轮传动所产生的力,近似认为滚筒只受印刷压力作用,支反力也仅按印刷压力来确定,为了简化计算,假设印刷压力是沿着滚筒轴向(接触区长度方向)均匀分布载荷。
近似计算滚筒刚度时认为,滚筒在支撑之间的全长是一个等截面的圆筒,根据材料力学中均布载荷等截面简支梁的计算公式,计算每个滚筒的最大挠度值y=5pl 4384EJ,J-滚筒中间界面的惯性矩(cm 4),E-滚筒材料的弹性模数(kg/cm ),L-支点间距离(cm )。
本模型的压印滚筒不是采用一体浇铸方法制造,而是通过滚筒体和滚筒轴装配成为滚筒部件的,通常根据经验公式进行求解。
针对本装配型无筋板结构印刷滚筒,滚筒体的扰度计算经验式为:y=0.032p E (D δ-1)3(1)式中:D-滚筒外径,σ-滚筒壁厚。
滚筒轴可以认为是等截面梁,受均匀载荷,其扰度计算经验式为:y 0=pl 4384E O J O ×5ψ3+40ψ2+96ψ+64(η-L )ψ3(2)式中ψ-系数,ψ=1a(1为滚筒体长度,a 为支撑点到滚筒体边缘的距离);η—系数,η=EJ E O J O (EJ 为滚筒与轴的总刚度,E O J O 为滚筒轴的刚度)。
根据上面两个公式,装配型无筋板结构印刷滚筒的总扰度为[2,3]:y 总=2(y o +y 1)(3)查阅《机械设计手册》:材料为HT300,弹性模量为E=2×1011Pa ,泊松比γ=0.27,密度ρ=7250kg/m 3。
中心压印滚筒模态分析

中心压印滚筒模态分析姚建平【摘要】The three-dimensional model of center impression cylinder was established through 3d modeling software Pro/ E. Modal analysis was carried out on center impression cylinder using ANSYS Workbench software to get dynamic features and natural frequency;the purpose was to verify the feasibility of center impression cylinder design, a theoretical basis is provided for the optimization of impression cylinder design.%通过三维建模软件 Pro/ E 建立中心压印滚筒的三维模型,运用 ANSYS Workbench 分析软件对中心压印辊筒进行模态分析,得到动态特性和固有频率;验证了中心压印滚筒方案设计的可行性,对压印滚筒的优化设计提供了理论依据。
【期刊名称】《机械研究与应用》【年(卷),期】2014(000)004【总页数】3页(P115-117)【关键词】ANSYS Workbench;中心压印滚筒;模态分析【作者】姚建平【作者单位】兰州交通大学机电工程学院,甘肃兰州 730070【正文语种】中文【中图分类】TS816;TH12Abstract: The three-dimensional model of center impression cylinder was established through 3d modeling software Pro/E. Modal analysis was carried out on center impression cylinder using ANSYS Workbench software to get dynamic features and natural frequency;the purpose wasto verify the feasibility of center impression cylinder design, a theoretical basis is provided for the optimization of impression cylinder design.Key words: ANSYS Workbench; center impression cylinder; modal analysis 纸纱复合包装袋是由纸纱复合制袋机生产的经纬纱连续环绕的无中缝的新型包装袋。
印铁机压印滚筒参数优化分析

印铁机压印滚筒参数优化分析李凡;丁武学;王纯;张宝【摘要】压印滚筒是印铁机关键部件,其工作性能直接影响印品最终的品质,传统的设计方法不能平衡滚筒的变形、应力和动态特性之间的关系。
运用 ansys workbench对压印滚筒进行参数优化设计,在保证滚筒的受力和动态性能得到改善的同时,减小滚筒的最大变形。
优化结果表明:通过截面尺寸的改进,在保证变形最小的前提下,应力得到了减小,固有频率得到了提高。
优化结果提升了压印滚筒的综合工作性能,为生产实践提供了理论支持。
%the impression cylinders are the key part of iron printing machine. Its working properties has a direct influence on the final products. The relationship among deformation, stress and dynamical properties can ont be balanced in the traditional de-sign. ANSYS workbench is applied to the parameter optimization of the impression cylinder and improvement of the stress and dynamical properties, so that its max deformation is decreased. The optimization results shows: under the condition of keeping cylinder minimal deformation value, through improving the cross dimension, its stress is greatly lowered, the inherent frequen-cy is raised and the synthesis properties of the impression cylinder is improved greatly. The theorefical support is provided for the practice.【期刊名称】《机械制造与自动化》【年(卷),期】2014(000)006【总页数】4页(P29-32)【关键词】workbench;印铁机;压印滚筒;优化设计【作者】李凡;丁武学;王纯;张宝【作者单位】南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094【正文语种】中文【中图分类】TH120 前言随着金属制罐行业的飞速发展,印铁机的需求日益增多,其性能也越来越受到行业内人士的广泛关注。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有限元方法与分析课程结业论文论文题目基于印刷机滚筒的模态分析专业机械设计及理论姓名学号联系方式任课老师印刷机滚筒的模态分析摘要:随着科技的进步,印刷技术也在日益提高,人们也在追逐高质量,高效益,品种多样化的印刷服务。
印刷机的核心部件印刷机滚筒,其结构和动态性能对印刷工作特性有很大影响。
运行中的振动问题直接影响到印刷的产品质量。
本论文基于ANSYS软件对某型印刷机滚筒优化前后的模态分析。
通过在PRO/E软件下建立压印滚筒的实体模型,将实体模型导入有限元分析软件ANSYS中,用ANSYS对其进行模态分析,得到固有频率和振型。
从动态特性上为静态优化结果提供了支持。
根据不同尺寸的滚筒都做出模态分析的结果得出了一些结论,为后续印刷机滚筒的改装提供了坚实理论依据。
关键词:印刷机滚筒;ANSYS;模态分析1 工作背景和工作原理滚筒是印刷机的核心部件,朝着轻量化的方向发展,其运动是旋转运动,印刷机高速运转时,其运动平稳性在很大程度上影响着印刷品质量,印刷时产生的重影、墨杆、网点扩大、墨色不均等故障都与滚筒的动态性能有关。
造成印刷滚筒不平衡的原因很多,如滚筒质量分布不均匀、滚筒在长度方向上发生挠曲变形、压印力沿滚筒轴向分布不均匀,滚筒两端压印力大,中间部位压印力小所产生的振动等,因此对滚筒进行动态特性分析对提高印刷品质量有着重要的意义。
2 理论分析并建立力学模型本实列以某四开胶印机压印滚筒为研究对象,建立有限元分析模型,运用有限元软件ANSYS对其进行模态分析,研究其振动特性。
由于滚筒受外力包括重力、齿轮扭矩、印刷压力等。
齿轮扭矩对滚筒挠曲变形产生的影响很小,可忽略不计,只考虑滚筒自身重力的作用。
压印滚筒通过滑动轴承安装在墙板孔中,因此可以将滚筒看成两端约束的简支梁进行完全约束。
2.1 模型的几何尺寸如下图给出了印刷机的结构简图,由图可以知道印刷机滚筒主要由滚筒和中心轴组成。
表1给出了各部件的几何尺寸。
表2 几何尺寸图1 印刷机滚筒的三视图图2 印刷机滚筒的三维图2.2 单元的选择及材料常数本实例采用三维的八节点SOLID185单元来模拟整个印刷机滚筒。
滚筒的材料为45号刚,其弹性模量为2.1E11Pa,泊松比为0.3,密度为7850kg/m3.3 有限元程序开发和参数优化3.1 建立模型用PRO/E软件按照如表1的尺寸以及图1的三视图模型建立印刷机滚筒模型。
将文件保存为IGES文件。
如图2所示。
打开ANSYS软件,通过File文件Import到入用PRO/E建立的IGES文件,即完成模型的建立。
3.2 定义单元和属性模型生成以后,接着在前处理的下拉菜单中进行定义单元类型和材料类型,进行任何有限元分析都必须选择合适的单元类型,单元类型决定附加的自由度,对于印刷机滚筒,主要是研究其模态分析,在整个过程中更关心的是其振动特性,因此选用实体单元SOLID185进行结构离散。
并且设置弹性模量(2.1E11Pa)、泊松比(0.3)和密度(7850kg/m3)。
3.3 网络划分网格划分的过程就是结构离散化的过程,通常划分的单元越多越密集,就越能反映实际结构状况,计算精度越高,计算工作量越大,计算时间增长。
为兼顾计算精度和计算效率,采用自动划分的方法进行网格划分。
利用软件智能自动给滚筒进行划分网格,网格精度取Smart Size 5。
网格划分结果如图3所示:图3 印刷机滚筒的网络划分后模型3.4 进行静力求解由于压印滚筒所受外力有多钟。
其中齿轮扭矩对滚筒挠度变形产生的影响很小,可以忽略不计,因而只考虑滚筒自身重力的作用。
压印滚筒通过滑动轴承安装在墙板孔中,因而可以将滚筒看出两端约束的简支梁进行完全约束。
因而将求解类型设置成静态求解,给连接轴的两端施加约束,并对滚筒施加重力载荷进而求解。
3.5 进行模态求解通过设置求解类型为模态分析,并设置模态分析的一些参数,如设置模态提取数为5等并进行求解。
3.6 后处理查看滚筒的固有频率,如图4所示,并提取第每阶固有频率的振型如图5、图6、图7、图8、图9所示。
图4 印刷机滚筒固有频率图4 印刷机滚筒第1阶模态振 图5 印刷机滚筒第2阶模态振型图6 印刷机滚筒第3阶模态振型 图7 印刷机滚筒第4阶模态振型图8 印刷机滚筒第5阶模态振型修改印刷机滚筒的参数:B2=0.013m;B1=0.05m;D2=0.12m。
按上述方法重新做一遍便可得出印刷机滚筒的固有频率和5阶振型。
如图10、图11、图12、图13、图14、图15所示。
图10 印刷机滚筒固有频率图11 印刷机滚筒第1阶模态振型 图12 印刷机滚筒第2阶模态振型图13 印刷机滚筒第3阶模态振型 图14 印刷机滚筒第4阶模态振型图15 印刷机滚筒第5阶模态振型3.7 结果分析综上分析,滚筒的尺寸不一样时,其固有频率也有差异。
但两种不同尺寸的滚筒的振型没有明显变化。
从上述模态振型图可以看出,滚筒在前3阶固有频率下,振型主要是以中间梁的弯曲变形为主。
而在后边两阶是以中间梁和外筒的弯曲变形。
从上述两种不同尺寸的模态振型图的结果对比可以得出,在修改滚筒的一些参数时,共振影响不大。
但是从二者对比可以看出适当减小滚筒厚度和内梁直径并增加侧壁厚度的厚度是可行的。
4 结语1)使用ANSYS有限元分析软件解决了传统的模态分析问题,作为一种新的设计手段,从动态特性上为静态优化结果提供了支持。
2)验证了适当减小滚筒厚度和内梁直径并增加侧壁的质量是可行的。
参考文献:[1] 张洪才,有限元分析——ANSYS13.0从入门到实战,机械工业出版社,2012年4月,517页。
[2]张立新,ANSYS7.0基础教程,机械工业出版社,2004年3月,244页。
[3]祝磊,ANSYS7.0入门与提高,清华大学出版社,2004年7月,379页[4]杜亚男,印刷机的模态分析,包装工程,510006,2011年8月,4页[5]杨家华,印刷机振动测试与分析,北京工业大学学报,第30卷第1期,2004年5月,4页。
附件1(命令流)/NOPR ! Suppress printing of UNDO process/PMACRO ! Echo following commands to logFINISH ! Make sure we are at BEGIN level/CLEAR,NOSTART ! Clear model since no SAVE found! WE SUGGEST YOU REMOVE THIS LINE AND THE FOLLOWING STARTUP LINES /input,menust,tmp,'',,,,,,,,,,,,,,,,1/GRA,POWER/GST,ON/PLO,INFO,3/GRO,CURL,ON/CPLANE,1/REPLOT,RESIZEWPSTYLE,,,,,,,,0/FILNAME,5,0/TITLE,5/AUX15!*IOPTN,IGES,SMOOTHIOPTN,MERGE,YESIOPTN,SOLID,YESIOPTN,SMALL,YESIOPTN,GTOLER, DEFAIGESIN,'123456','igs','..\..\proe\youxianyuanzuoye\'VPLOT!*FINISH/PREP7!*ET,1,SOLID185!*!*MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,EX,1,,2.1e11MPDATA,PRXY,1,,0.288MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,DENS,1,,7850SMRT,6SMRT,5MSHAPE,1,3DMSHKEY,0!*CM,_Y,VOLUVSEL, , , , 1CM,_Y1,VOLUCHKMSH,'VOLU'CMSEL,S,_Y!*VMESH,_Y1!*CMDELE,_YCMDELE,_Y1CMDELE,_Y2!*FINISH/SOL!*ANTYPE,0/USER, 1/VIEW, 1, 0.692111943844 , 0.321103168199 , 0.646431599290 /ANG, 1, 12.1606464575/REPLO/VIEW, 1, 0.470567854088 , 0.427919802871 , 0.771654415531 /ANG, 1, 6.04288451640/REPLO/VIEW, 1, 0.654364861158 , -0.392970517756 , 0.646050153360 /ANG, 1, -4.27717159610/REPLO/VIEW, 1, 0.550758399173 , -0.653513216609 , 0.519216391747 /ANG, 1, -4.95954011275/REPLOFLST,2,1,5,ORDE,1FITEM,2,68!*/GODA,P51X,UX,FLST,2,1,5,ORDE,1FITEM,2,68!*/GODA,P51X,UY,FLST,2,1,5,ORDE,1FITEM,2,68!*/GODA,P51X,UZ,/VIEW, 1, -0.544697275514 , -0.616435687599 , 0.568605241887 /ANG, 1, 60.6247141398/REPLO/VIEW, 1, -0.893495573342 , -0.412684834613 , 0.177078761285 /ANG, 1, 79.8375474749/REPLO/VIEW, 1, -0.776181112388 , -0.579310317946 , -0.248882374413 /ANG, 1, 97.1839152481/REPLO/VIEW, 1, -0.534268681398 , -0.767699054022 , -0.353829250530 /ANG, 1, 107.950137149/REPLO/VIEW, 1, -0.730821237300 , -0.585440629261 , -0.350941004618 /ANG, 1, 102.572268236/REPLOFLST,2,1,5,ORDE,1FITEM,2,76!*/GODA,P51X,UX,/VIEW, 1, -0.512612053737 , -0.754351719334 , -0.410100433920 /ANG, 1, 111.257524777/REPLOFLST,2,1,5,ORDE,1FITEM,2,76!*/GODA,P51X,UY,FLST,2,1,5,ORDE,1FITEM,2,76!*/GODA,P51X,UZ,ACEL,0,9.8,0,/REPLOT,RESIZE/STATUS,SOLUSOLVE!*!*!*FINISH/SOLUTIONANTYPE,2!*!*!*MODOPT,LANB,5EQSLV,SPARMXPAND,5, , ,0LUMPM,0PSTRES,1!*MODOPT,LANB,5,0,0, ,OFF/STATUS,SOLUSOLVEFINISH/POST1SET,LISTSET,LIST,999SET,,, ,,, ,1!*/EFACET,1PLNSOL, U,SUM, 0,1.0/FOC, 1, 1152.62859868 , -32.2869891375 , 103.602516273 /REPLO/FOC, 1, 1146.75540831 , -47.4183320124 , 138.776882101 /REPLOSET,LIST,999SET,,, ,,, ,2!*PLNSOL, U,SUM, 0,1.0/VIEW, 1, -0.399957818762 , -0.811826181496 , -0.425408032657 /ANG, 1, 117.493652255/REPLO/DIST, 1, 1076.68499474/ANG, 1, 120.493652255/REPLO/DIST, 1, 1026.82819366/ANG, 1, 124.393652255/REPLO/DIST, 1, 965.449686582/ANG, 1, 117.793652255/REPLO/FOC, 1, 1143.39311671 , -89.7764810587 , 222.772073695 /REPLO/FOC, 1, 1079.25854689 , -24.7562953506 , 158.988683754 /REPLO/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/VIEW, 1, -0.418757615035 , -0.905158968076 , 0.730020709476E-01/ANG, 1, 66.5702386287/REPLO/ZOOM,1,RECT,-0.452713,-0.356679 ,-0.440687303907 ,-0.276526704999 /ZOOM,1,RECT,-0.388575,-0.164313 ,-0.376549130391 ,-0.184351136666 /ZOOM,1,SCRN,-0.580990,-0.064122,-0.432670,-0.060115/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,1.37174211248,1/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/ZOOM,1,SCRN,0.373066,-0.056107,0.248798,-0.072137 /DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,0.924021086472,1 /REP,FAST/DIST,1,0.924021086472,1 /REP,FAST/DIST,1,0.924021086472,1 /REP,FAST/DIST,1,0.924021086472,1 /REP,FAST/DIST,1,0.924021086472,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/DIST,1,1.08222638492,1 /REP,FAST/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/VIEW, 1, -0.303974895465 , -0.934999895344 , 0.182686777393 /ANG, 1, 47.022*******/REPLO/FOC, 1, -2993.07785030 , -6935.96177116 , 158.986428544 /REPLO/FOC, 1, -2993.07902092 , -6935.96165429 , 158.985078868 /REPLO/VIEW, 1, -0.499202949220 , -0.862854521793 , -0.792369213859E-01/ANG, 1, 83.7599485712/REPLO/VIEW, 1, -0.671136689583 , -0.567473681060 , -0.477021137058 /ANG, 1, 104.728499750/REPLO/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST, 1, 0.547889640061E-02/ANG, 1, 133.528499750/REPLO/VIEW, 1, -0.846814285741 , -0.194392840420 , -0.495092909521 /ANG, 1, 131.506813114/REPLO/ANG,1,-30,YS,1/REP,FAST/ANG,1,30,YS,1/REP,FAST/ANG,1,-30,ZS,1/REP,FAST/ANG,1,30,ZS,1/REP,FAST/AUTO,1/REP,FAST/USER, 1/VIEW, 1, -0.725005893189 , -0.562974100963 , -0.396770231349 /ANG, 1, 129.859269893/REPLO/VIEW, 1, -0.546763694962 , -0.732440476302 , -0.405685112552 /ANG, 1, 134.842329241/REPLO/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/VIEW, 1, -0.339831015383 , -0.795054611276 , -0.502397299030 /ANG, 1, 149.422222637/REPLOSET,LIST,999SET,,, ,,, ,3!*/EFACET,1PLNSOL, U,SUM, 0,1.0/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/DIST,1,0.729,1/REP,FAST/AUTO,1/REP,FAST/ZOOM,1,RECT,0.597549,-0.128244 ,1.00643023606 ,-0.108206101956/AUTO,1/REP,FAST/USER, 1/VIEW, 1, -0.895309168630 , -0.355273186869 , -0.268705145576 /ANG, 1, 124.386127380/REPLO/VIEW, 1, -0.823349010166 , 0.488252689613 , 0.289319405751 /ANG, 1, 127.185337877/REPLO/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FASTSET,LIST,999SET,,, ,,, ,4!*/EFACET,1PLNSOL, U,SUM, 0,1.0/ZOOM,1,RECT,0.533411,-0.284542 ,-0.324436864408 ,-0.0200381670289 /AUTO,1/REP,FAST/USER, 1/VIEW, 1, -0.345900936836 , -0.839273387561 , -0.419491028305 /ANG, 1, 128.854215406/REPLO/VIEW, 1, -0.369195661989 , -0.913121218386 , -0.172928319549 /ANG, 1, 106.438347345/REPLO/ZOOM,1,RECT,0.216729,-0.396756 ,0.184659887881 ,-0.480916008694/VIEW, 1, -0.370985246955 , -0.914279270672 , -0.162675633582 /ANG, 1, 105.140195013/REPLO/AUTO,1/REP,FAST/USER, 1/VIEW, 1, -0.174594752148 , -0.953904628332 , 0.244095539840 /ANG, 1, 30.3510943299/REPLO/VIEW, 1, -0.111308972024 , -0.815663720400 , 0.567717366276 /ANG, 1, 8.12945732606/REPLO/ZOOM,1,RECT,0.252807,-0.380725 ,0.224746246329 ,-0.60916027768/AUTO,1/REP,FAST/USER, 1/VIEW, 1, 0.892777808621E-01, -0.690107440169 , 0.718179085513 /ANG, 1, -6.20271418698/REPLO/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/FOC, 1, 1140.15836729 , 82.5399219788 , 20.7837828703 /REPLO/DIST, 1, 1041.82895488/ANG, 1, -1.40271418698/REPLO/DIST, 1, 1041.82895488/ANG, 1, -1.40271418698/LIG, 1,1, 1.000, 0.00000000000 , 0.00000000000 , 0.00000000000 , 0.00000000000/REPLO/ZOOM,1,RECT,0.385092,0.428817 ,0.521385298844 ,0.364694639927/AUTO,1/REP,FAST/USER, 1/DIST, 1, 1205.80674147/ANG, 1, 4.89728581302/REPLO/ZOOM,1,RECT,0.256815,0.460878 ,0.332979414138 ,0.428816774419/AUTO,1/REP,FAST/USER, 1/VIEW, 1, 0.570707897491E-01, 0.929958051205 , 0.363209234405/ANG, 1, -140.167003993/REPLO/DIST, 1, 1144.08184619/ANG, 1, -159.667003993/REPLO/DIST, 1, 1016.20167081/ANG, 1, -167.467003993/REPLO/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST, 1, 1043.87392729/ANG, 1, -169.267003993/REPLO/DIST, 1, 955.458324640/ANG, 1, -170.167003993/REPLO/DIST, 1, 1277.91643155/ANG, 1, -163.867003993/REPLO/DIST, 1, 1506.20525192/ANG, 1, -151.267003993/REPLO/DIST, 1, 1645.58552799/ANG, 1, -21.9670039930/REPLO/VIEW, 1, -0.491408888816E-01, 0.695819468809 , 0.716533627868 /ANG, 1, -32.2511861613/REPLO/DIST, 1, 1494.35005857/ANG, 1, -5.85118616130/REPLO/DIST, 1, 1703.80714444/ANG, 1, -32.2511861613/REPLO/DIST,1,1.08222638492,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/VIEW, 1, -0.180802016774 , 0.376828330687 , 0.908466311936 /ANG, 1, -35.9656955071/REPLO/VIEW, 1, -0.345864090521 , -0.121796779243 , 0.930345943966 /ANG, 1, -36.7744425564/REPLO/VIEW, 1, -0.323905437111 , -0.408219124805 , 0.853********* /ANG, 1, -36.4670236713/REPLO/DIST,1,0.924021086472,1/REP,FAST/VIEW, 1, -0.297045468730 , -0.284462352091 , 0.911507081569/ANG, 1, -37.5057161791/REPLOSET,LIST,999SET,,, ,,, ,5!*/EFACET,1PLNSOL, U,SUM, 0,1.0/VIEW, 1, -0.433986630556 , -0.810664783986 , 0.393037164278 /ANG, 1, -17.1999218344/REPLO/VIEW, 1, 0.174241070646 , 0.776760430952 , -0.605213418727 /ANG, 1, 29.1623586916/REPLO/VIEW, 1, 0.256029986462 , 0.840102756574 , -0.478200799277 /ANG, 1, 19.3032907387/REPLO)/GOP ! Resume printing after UNDO process)! We suggest a save at this point/NOPR ! Suppress printing of UNDO process/PMACRO ! Echo following commands to logFINISH ! Make sure we are at BEGIN level/CLEAR,NOSTART ! Clear model since no SAVE found! WE SUGGEST YOU REMOVE THIS LINE AND THE FOLLOWING STARTUP LINES /input,menust,tmp,'',,,,,,,,,,,,,,,,1/GRA,POWER/GST,ON/PLO,INFO,3/GRO,CURL,ON/CPLANE,1/REPLOT,RESIZEWPSTYLE,,,,,,,,0/REPLOT,RESIZE/FILNAME,6,0/TITLE,6/FILNAME,7,0/TITLE,7/AUX15!*IOPTN,IGES,SMOOTHIOPTN,MERGE,YESIOPTN,SOLID,YESIOPTN,SMALL,YESIOPTN,GTOLER, DEFAIGESIN,'xinmoxing','igs','..\..\proe\youxianyuanzuoye\'VPLOT!*FINISH/PREP7!*ET,1,SOLID185!*!*MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,EX,1,,2.1e11MPDATA,PRXY,1,,0.288MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,DENS,1,,7850SMRT,6SMRT,5MSHAPE,1,3DMSHKEY,0!*CM,_Y,VOLUVSEL, , , , 1CM,_Y1,VOLUCHKMSH,'VOLU'CMSEL,S,_Y!*VMESH,_Y1!*CMDELE,_YCMDELE,_Y1CMDELE,_Y2!*FINISH/SOL!*ANTYPE,0/USER, 1/VIEW, 1, -0.422466028597 , 0.775588962245E-02, 0.906345574744 /ANG, 1, -13.4566960390/REPLO/VIEW, 1, -0.550830938885 , -0.156902990237 , 0.819735767441 /ANG, 1, -12.6393844723/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/FOC, 1, 190.440433657 , 58.1106908593 , 1339.09138739 /REPLO/VIEW, 1, -0.358323937473 , -0.179072592010 , 0.916262496572 /ANG, 1, -14.9896562243/REPLOFLST,2,1,5,ORDE,1FITEM,2,76!*/GODA,P51X,UX,FLST,2,1,5,ORDE,1FITEM,2,76!*/GODA,P51X,UY,FLST,2,1,5,ORDE,1FITEM,2,76!*/GODA,P51X,UZ,/DIST, 1, 469.422648514/ANG, 1, 3.31034377570/REPLO/VIEW, 1, -0.975330527155 , -0.120392330132 , 0.185029861493 /ANG, 1, 14.0663558267/VIEW, 1, -0.386277352033 , -0.878474347255E-02, -0.922340845668 /ANG, 1, 26.4596496252/REPLO/VIEW, 1, -0.223693818268 , -0.164038510551 , -0.960756182767 /ANG, 1, 27.4989911788/REPLOFLST,2,1,5,ORDE,1FITEM,2,70!*/GODA,P51X,UX,FLST,2,1,5,ORDE,1FITEM,2,70!*/GODA,P51X,UY,FLST,2,1,5,ORDE,1FITEM,2,70!*/GODA,P51X,UZ,ACEL,0,9.8,0,/STATUS,SOLUSOLVE!*!*!*FINISH/SOLUTIONANTYPE,2!*!*!*MODOPT,LANB,5EQSLV,SPARMXPAND,5, , ,0LUMPM,0PSTRES,1!*MODOPT,LANB,5,0,0, ,OFF/STATUS,SOLUSOLVEFINISHSET,LISTSET,LIST,999SET,,, ,,, ,1!*/EFACET,1PLNSOL, U,SUM, 0,1.0/VIEW, 1, -0.223693818268 , -0.164038510551 , -0.960756182767 /DIST, 1, 435.817836548/ANG, 1, 25.3989911788/REPLO/VIEW, 1, -0.410286128619 , -0.922598874320E-01, -0.907278020143 /ANG, 1, 23.8418933640/REPLO/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/VIEW, 1, -0.557637319803 , -0.105010526077E-01, -0.830018281399 /ANG, 1, 23.1019922282/REPLO/VIEW, 1, -0.608995889787 , -0.899360149772E-02, -0.793122387375 /ANG, 1, 23.0548715251/REPLO/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FASTSET,LIST,999SET,,, ,,, ,2!*/EFACET,1PLNSOL, U,SUM, 0,1.0/VIEW, 1, -0.608995889787 , -0.899360149772E-02, -0.793122387375 /DIST, 1, 787.053993159/ANG, 1, 26.0548715251/REPLO/ZOOM,1,RECT,-0.188143,0.076145 ,-0.256290055047 ,0.108206101956/AUTO,1/REP,FAST/USER, 1/VIEW, 1, -0.799794118172 , -0.132494469731 , -0.585469541503 /ANG, 1, 24.7295594056/REPLOSET,LIST,999SET,,, ,,, ,3!*/EFACET,1PLNSOL, U,SUM, 0,1.0/VIEW, 1, -0.876368962331 , -0.147086417202 , -0.458631690725 /ANG, 1, 23.4766426880/REPLOSET,LIST,999SET,,, ,,, ,4!*/EFACET,1PLNSOL, U,SUM, 0,1.0SET,LIST,999SET,,, ,,, ,5!*/EFACET,1PLNSOL, U,SUM, 0,1.0/DIST, 1, 1127.64408754/ANG, 1, 30.9766426880/REPLO/VIEW, 1, -0.757450965559 , -0.480443543458 , -0.442088267570 /ANG, 1, 31.8031862240/REPLO/DIST, 1, 1087.39093687/ANG, 1, 29.1031862240/REPLO/FOC, 1, 84.8834081720 , -97.3423171559 , 1179.69854269/REPLO/VIEW, 1, -0.881135692436 , 0.593038226039E-01, -0.469129990663/ANG, 1, 27.1039882993/REPLO/VIEW, 1, -0.798544761745 , 0.285169945144 , -0.530098449230/ANG, 1, 26.2158607209/REPLO/VIEW, 1, -0.234468345419 , 0.741555880737 , -0.628585293131/ANG, 1, 5.96190563194/REPLO/DIST, 1, 839.116486326/ANG, 1, -26.7380943681/REPLO/DIST,1,1.08222638492,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/DIST,1,1.08222638492,1/REP,FAST/VIEW, 1, 0.413913220566 , 0.499194797673 , -0.761236099917/ANG, 1, -58.7093811374/REPLO/VIEW, 1, 0.413913220566 , 0.499194797673 , -0.761236099917/ANG, 1, -58.7093811374/LIG, 1,1, 1.000, 0.00000000000 , 0.00000000000 , 0.00000000000 , 0.00000000000/REPLO/DIST, 1, 1429.30984025/ANG, 1, -110.609381137/REPLO/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST/DIST,1,0.924021086472,1/REP,FAST)/GOP ! Resume printing after UNDO process )! We suggest a save at this point31。