控制系统状态空间设计
控制系统状态空间法
控制系统状态空间法控制系统状态空间法是现代控制理论中常用的一种方法,它描述了控制系统的动态行为,并通过状态变量来表示系统的内部状态。
在这篇文章中,我们将详细介绍控制系统状态空间法的基本概念、理论原理以及应用。
一、控制系统状态空间法的基本概念状态空间法是一种描述动态系统的方法,通过一组一阶微分方程来表示系统的动态行为。
在这个方法中,我们将控制系统看作是一个黑盒子,输入和输出之间的关系可以用状态方程和输出方程来描述。
1. 状态方程状态方程描述了系统的内部状态随时间的演化规律。
它是一个一阶微分方程组,通常用向量形式表示:ẋ(t) = Ax(t) + Bu(t)其中,x(t)表示系统的状态向量,A是状态转移矩阵,B是输入矩阵,u(t)是输入向量。
2. 输出方程输出方程描述了系统的输出与内部状态之间的关系。
它通常用线性方程表示:y(t) = Cx(t) + Du(t)其中,y(t)表示系统的输出向量,C是输出矩阵,D是直接传递矩阵。
3. 状态空间表示将状态方程和输出方程合并,可以得到系统的状态空间表示:ẋ(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)在状态空间表示中,状态向量x(t)包含了系统的所有内部状态信息,它决定了系统的行为和性能。
二、控制系统状态空间法的理论原理控制系统状态空间法基于线性时不变系统理论,通过分析系统的状态方程和输出方程,可以得到系统的稳定性、可控性和可观测性等性质。
1. 系统稳定性系统稳定性是判断系统是否能够在有限时间内达到稳定状态的重要指标。
对于线性时不变系统,当且仅当系统的所有状态变量都是稳定的,系统才是稳定的。
通过分析状态方程的特征值,可以判断系统的稳定性。
2. 系统可控性系统可控性表示是否可以通过选择合适的输入来控制系统的状态。
一个系统是可控的,当且仅当存在一组输入矩阵B的列向量线性组合可以使得系统的状态从任意初始条件变为目标状态。
通过分析状态转移矩阵的秩,可以判断系统的可控性。
状态空间设计pid控制器原理
状态空间设计pid控制器原理PID控制器是一种常见的控制系统,用于调节系统的输出以使其接近预期的参考输入。
PID代表比例(Proportional)、积分(Integral)和微分(Derivative),这三个部分组合起来形成了PID控制器。
首先,让我们来看看状态空间设计。
状态空间模型是用一组一阶微分方程描述动态系统的数学模型。
在状态空间设计中,系统的动态行为被表示为状态变量的一组一阶微分方程。
这些状态变量通常是系统的最小集合,可以完全描述系统的动态行为。
状态空间模型可以方便地用于多变量系统和非线性系统的分析与设计。
现在,让我们来谈谈PID控制器的原理。
PID控制器的基本原理是通过比例、积分和微分三个部分来调节系统的输出。
比例部分产生一个控制量,与系统的误差成比例。
积分部分对系统历史上的误差进行累积,并产生一个控制量。
微分部分预测系统未来的误差变化率,并产生一个控制量。
这三个部分的输出通过加权求和得到最终的控制量,用于调节系统的输出。
在状态空间设计中,可以将PID控制器与系统的状态空间模型相结合,从而实现对系统的控制。
通过将PID控制器的输出作为系统的输入,可以设计状态空间反馈控制器,从而实现对系统状态的稳定和跟踪。
总的来说,PID控制器的原理是基于比例、积分和微分三个部分来调节系统的输出,而状态空间设计则是一种描述动态系统的数学模型。
将PID控制器与状态空间模型相结合,可以实现对系统的控制和稳定。
这种方法在工业控制和自动化领域得到了广泛的应用。
希望这个回答能够帮助你理解PID控制器原理和状态空间设计的相关概念。
控制系统的状态空间分析与设计
控制系统的状态空间分析与设计控制系统的状态空间分析与设计是现代控制理论的重要内容之一,它提供了一种描述和分析控制系统动态行为的数学模型。
状态空间方法是一种广泛应用于系统建模和控制设计的理论工具,其基本思想是通过描述系统内部状态的变化来揭示系统的特性。
一、状态空间模型的基本概念状态空间模型描述了系统在不同时间点的状态,包括系统的状态变量和输入输出关系。
在控制系统中,状态变量是指影响系统行为的内部变量,如电压、速度、位置等。
通过状态空间模型,可以将系统行为转化为线性代数方程组,从而进行分析和设计。
1. 状态方程控制系统的状态方程是描述系统状态演化的数学表达式。
一般形式的状态方程可以表示为:x(t) = Ax(t-1) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)是系统在时刻t的状态向量,A是系统的状态转移矩阵,B是控制输入矩阵,u(t)是系统的控制输入,y(t)是系统的输出,C是输出矩阵,D是直接传递矩阵。
2. 状态空间矩阵状态空间矩阵包括系统的状态转移矩阵A、控制输入矩阵B、输出矩阵C和直接传递矩阵D。
通过这些矩阵,可以准确描述系统的状态变化与输入输出之间的关系。
3. 系统的可控性和可观性在状态空间分析中,可控性和可观性是评估系统控制性能和观测性能的重要指标。
可控性是指通过调节控制输入u(t),系统的状态可以在有限时间内从任意初始状态x(0)到达任意预期状态x(t)。
可控性可以通过系统的状态转移矩阵A和控制输入矩阵B来判定。
可观性是指通过系统的输出y(t)可以完全确定系统的状态。
可观性可以通过系统的状态转移矩阵A和输出矩阵C来判定。
二、状态空间分析方法状态空间分析方法包括了系统响应分析、系统稳定性分析和系统性能指标分析。
1. 系统响应分析系统的响应分析可以通过状态方程进行。
主要分析包括零输入响应和零状态响应。
零输入响应是指当控制输入u(t)为零时,系统的输出y(t)变化情况。
2019-§2控制系统的状态空间模型-文档资料
(3)定义状态向量、控制向量和输出向量
x1 y
d2y dy m d2tfd tk yF i
x2 y x1
uFi ,
yy,
整理(2-2-2)式
mdd dxd2t 2yt2 f dxd2 ytkxy1 F u i (2-2-2)
(4)可将2阶微分方程表示的系统写成2个一阶微分
(2)状态变量可以测量或不可测量。
2.2 状态空间方程的建立
例2-2-1 力学系统 弹簧-质量-阻尼器系统如图示。 列出以拉力Fi为输入,以质量单元的位移y为输出的 状态方程。
k
M
y Fi
Ff Fk
M
y Fi
图 2-5 弹簧-质量-阻尼器系统
(1)确定输入变量:
系统入: Fi, 出:y
(2)基本定理:
§2 控制系统的状态空间模型
微分方程 → 单输入、单输出线性定常系统 状态空间方程 → 多变量系统,现代控制理 论的数学描述方法
两种表示方法可以互相转换。
2.1 状态空间的基本概念
被控对象的变量可以分为三类:
n 输入变量(控制变量和干扰变量)
u[u1,u2 ur]T
n 输出变量(被控变量)
y[y1,y2,ym]T
0
1
m
u
和
y1
0
x1 x2
得到
0 xm k
1m f xx1 2m 1 0u
y 1
0
x1 x2
状态方程 xAxBu 输出方程
y Cx
系数矩阵
0 1
A
1.控制系统的状态空间模型
Chapter1控制系统的状态空间模型1.1 状态空间模型在经典控制理论中,采用n 阶微分方程作为对控制系统输入量)(t u 和输出量)(t y 之间的时域描述,或者在零初始条件下,对n 阶微分方程进行Laplace 变换,得到传递函数作为对控制系统的频域描述,“传递函数”建立了系统输入量)]([)(t u L s U =和输出量)]([)(t y L s Y =之间的关系。
传递函数只能描述系统的外部特性,不能完全反映系统内部的动态特征,并且由于只考虑零初始条件,难以反映系统非零初始条件对系统的影响。
现代控制理论是建立在“状态空间”基础上的控制系统分析和设计理论,它用“状态变量”来刻画系统的内部特征,用“一阶微分方程组”来描述系统的动态特性。
系统的状态空间模型描述了系统输入、输出与内部状态之间的关系,揭示了系统内部状态的运动规律,反映了控制系统动态特性的全部信息。
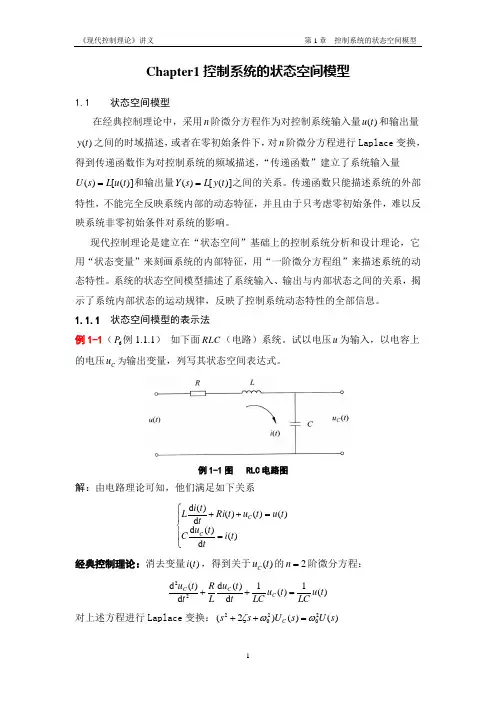
1.1.1 状态空间模型的表示法例1-1(6P 例1.1.1) 如下面RLC (电路)系统。
试以电压u 为输入,以电容上的电压C u 为输出变量,列写其状态空间表达式。
例1-1图 RLC 电路图解:由电路理论可知,他们满足如下关系⎪⎩⎪⎨⎧==++)(d )(d )()()(d )(d t i t t u C t u t u t Ri t t i L C C 经典控制理论:消去变量)(t i ,得到关于)(t u C 的2=n 阶微分方程:)(1)(1d )(d d )(d 22t u LCt u LC t t u L R t t u C C C =++ 对上述方程进行Laplace 变换:)()()2(20202s U s U s s C ωωζ=++得到传递函数:202202)(ωζω++=s s s G ,LC10=ω,L R 2=ζ 现代控制理论:选择⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛)()(21t u t i x x C 流过电容的电流)(t i 和电容上的电压)(t u C 作为2个状态变量,2=n (2个储能元件);1个输入为)(t u ,1=m ;1个输出C u y =,1=r 。
控制系统的状态空间描述
03
方法二、根据传递函数求解
状态方程的标准形式
状态方程的定义 状态方程 所谓状态方程,就是描述系统的状态之间以及输入和状态之间动态关系的一阶微分方程组。
3.2.2 状态空间表达式
向量矩阵形式为
状态向量
输入向量
维的函数向量
3、线性定常系统的状态方程
向量矩阵形式为
维的系数矩阵
维的系数矩阵
输出方程
输出方程的标准形式
解:列写回路的电压方程和节点的电流方程
选取 为状态变量,输出 ,得系统的状态空间表达式为
消去 并整理得
设初始条件为零,对上式两端进行拉普拉斯变换,得
写成向量矩阵形式为
其中
输入变量的Laplace变换象函数
2)数目最小的含义:是指这个变量组中的每个变量都是相互独立的。
二、状态向量
若一个系统有n个状态变量: ,用这n个状态变量作为分量所构成的向量 ,就称为该系统的状态向量,用 表示。
例 试建立下图所示电路网络的状态方程和输出方程。
01
考虑标量的一阶微分方程
02
用拉氏变换解有:
3.2.2 状态微分方程的解
定义矩阵指数函数为:
上式也经常写做状态转移矩阵的形式
系统的零输入响应为:
1.3 传递函数矩阵
例:系统如下图所示,输入为 和 ,输出为 。
较之传递函数,状态空间描述的优点有:
3、状态空间分析是一种时域分析方法,可用计算机直接在时域中进行数值计算。
2、由前面的分析可以看出,对于不同维数的系统,可以采用同一表达方式来进行描述,由此可见从低维系统得到的结论可以方便地推广到高维系统,只是计算复杂一些而已。
第9章 控制系统的状态空间描述
第9章 控制系统的状态空间描述
2.状态变量 能够完全表征系统运动状态的最小变量组中的每个变量 xi(t)(i=1,2,…,n)称为状态变量。 3.状态向量 系统有n 个状态变量x1(t),…,xn(t),用这n 个状态变量作为 分量所构成的向量(通常以列向量表示)称为系统的状态向 量:x(t)=(x1(t)…xn(t))T。
第9章 控制系统的状态空间描述 和
第9章 控制系统的状态空间描述
将上两式用矩 阵方程的形式表示, 可得出线性时变系 统的状态空间表达 式为
第9章 控制系统的状态空间描述 或者,状态空间表达式也可以表示为
式中,A(t)为n×n 系统矩阵,即
第9章 控制系统的状态空间描述 B(t)为n×r 输入矩阵,即
第9章 控制系统的状态空间描述
图9-3 系统结构图
第9章 控制系统的状态空间描述 (1)输入引起系统内部状态发生变化,其变化方程式称为
状态方程,其一般形式为
(2)系统内部状态及输入变化引起系统输出的变化,其变 化方程式称为输出方程,其一般形式为
第9章 控制系统的状态空间描述
பைடு நூலகம்
第9章 控制系统的状态空间描述
第9章 控制系统的状态空间描述
第9章 控制系统的状态空间描述
9.1 控制系统中状态的基本概念 9.2控制系统的状态空间表达式 9.3根据系统的物理机理建立状态空间表达式 9.4根据系统的微分方程建立状态空间表达式 9.5根据系统的方框图或传递函数建立状态空 间表达式 9.6从状态空间表达式求取传递函数矩阵 9.7系统状态空间表达式的特征标准型
状态方程和输出方程组合起来,构成对系统动态行为的 完整描述,称为系统的状态空间表达式,又称动态方程,其一般 形式为
现代控制理论-第二章 控制系统的状态空间描述
DgXu
2.2.1.由物理机理直接建立状态空间表达式: 例2.2.1 系统如图所示
L
R2
u
iL
R1
uc
选择状态变量:
x1 iL , x2 uC ,
13 中南大C diL 1 iL (u L ) C dt R1 dt duC diL L uC C R2 u dt dt
y(s) [C(sI A) B D]U (s)
1
1
得
9
G(s) C (sI A) B D
命题得证
中南大学信息学院自动化系
1
DgXu
例2.1.3
已知系统的状态空间描述为
x1 0 1 0 x1 0 x 0 1 1 x 1 u 2 2 x3 0 0 3 x3 1
28 中南大学信息学院自动化系
DgXu
故有(n-1) 个状态方程:
对xl求导数且考虑式 (2.3.12),经整理有:
则式 (2.3.12) bn=0 时的动态方程为:
(2.3.16)
式中:
29 中南大学信息学院自动化系
DgXu
30 中南大学信息学院自动化系
DgXu
3)
化输入-输出描述为状态空间描述
11 中南大学信息学院自动化系
DgXu
2.3. 线性定常连续系统状态空间表达式的建立
建立状态空间表达式的方法主要有两种: 一是直接根据系统的机理建立相应的微分方程或差分方 程,继而选择有关的物理量作为状态变量,从而导出其状态 空间表达式; 二是由已知的系统其它数学模型经过转化而得到状态达 式。由于微分方程和传递函数是描述线性定常连续系统常用 的数学模型,故我们将介绍已知 n 阶系统微分方程或传递函 数时导出状态空间表达式的一般方法,以便建立统一的研究 理论,揭示系统内部固有的重要结构特性。
现代控制理论基础-第2章-控制系统的状态空间描述精选全文完整版
(2-18)
解之,得向量-矩阵形式的状态方程
(2-19)
输出方程为
(2-20)
(5) 列写状态空间表达式
将式(2-19)和式(2-20)合起来即为状态空间表达式,若令
则可得状态空间表达式的一般式,即
(2-21)
例2.2 系统如图
取状态变量:
得:
系统输出方程为:
写成矩阵形式的状态空间表达式为:
1.非线性系统
用状态空间表达式描述非线性系统的动态特性,其状态方程是一组一阶非线性微分方程,输出方程是一组非线性代数方程,即
(2-7)
2. 线性系统的状态空间描述
若向量方程中 和 的所有组成元都是变量 和 的线性函数,则称相应的系统为线性系统。而线性系统的状态空间描述可表示为如下形式: (2-8) 式中,各个系数矩阵分别为 (2-9)
4.线性定常系统的状态空间描述
式中的各个系数矩阵为常数矩阵
当系统的输出与输入无直接关系(即 )时,称为惯性系统;相反,系统的输出与输入有直接关系(即 )时,称为非惯性系统。大多数控制系统为惯性系统,所以,它们的动态方程为
(2-11)
1.系统的基本概念 2. 动态系统的两类数学描述 3. 状态的基本概念
2.2 状态空间模型
2.2.1状态空间的基本概念
1.系统的基本概念
■系统:是由相互制约的各个部分有机结合,且具有一定功能的整体。 ■静态系统:对于任意时刻t,系统的输出惟一地取决于同一时刻的输入,这类系统称为静态系统。静态系统亦称为无记忆系统。静态系统的输入、输出关系为代数方程。 ■动态系统:对任意时刻,系统的输出不仅与t时刻的输入有关,而且与t时刻以前的累积有关(这种累积在t0(t0<t)时刻以初值体现出来),这类系统称为动态系统。由于t0时刻的初值含有过去运动的累积,故动态系统亦称为有记忆系统。动态系统的输入、输出关系为微分方程。
状态空间分析与控制系统设计
状态空间分析与控制系统设计状态空间分析和控制系统设计是现代控制理论中重要的基础概念和方法。
通过对系统的状态和状态方程进行建模和分析,可以实现对系统行为的全面理解和控制。
本文将介绍状态空间分析和控制系统设计的基本原理,并分析其在实际应用中的重要性和价值。
一、状态空间分析状态空间分析是一种将系统的动态行为表示为一组线性常微分方程或差分方程的方法。
在状态空间模型中,系统的行为被描述为一系列状态变量的演化过程,而不是传统的输入-输出模型。
通过状态空间模型,我们可以更加全面地了解系统的内部结构和动态性能。
在状态空间分析中,系统的行为由一组一阶微分方程或差分方程表示:x(t+1) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)是系统的状态向量,表示系统的内部状态,u(t)是输入控制向量,y(t)是输出向量,A、B、C和D是系统的系数矩阵。
通过对状态空间方程进行求解和分析,可以得到系统的模态特性、状态转移矩阵、特征值和特征向量等重要信息。
这些信息能够帮助我们了解系统的稳定性、可控性和可观测性等特性,从而为系统的控制设计提供重要依据。
二、控制系统设计基于状态空间分析的控制系统设计是将系统的状态空间模型与控制算法相结合,实现对系统动态行为的控制和调节。
通过对状态空间方程的设计和调整,可以实现对系统的稳定性、响应速度、精度和鲁棒性等方面的要求。
常用的状态空间控制方法包括状态反馈控制、输出反馈控制和观测器设计等。
状态反馈控制是通过测量系统状态并构造一个状态反馈控制器来实现对系统的控制。
输出反馈控制是通过测量系统输出并构造一个输出反馈控制器来实现控制目标。
观测器设计是通过测量系统输出并估计系统状态来实现对系统的控制。
在控制系统设计过程中,我们需要考虑系统的稳定性、响应时间、鲁棒性和控制精度等方面的要求。
通过合理选择控制算法和调节参数,可以使系统在各种工作条件下保持良好的动态性能和稳定性,提高系统的控制质量和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Y(s)
1
s2 2s 2
x
k2
由图可见,在校正控制器中,除包含有 状态变量反馈外,还包含了参考阶跃输入的 内模(图中积分器环节),故称为内模控制 器。
下例为一个具体系统的单位阶跃输入内 模控制器的设计过程。
2020年7月29日
11
要求系统输出能以零稳态误差跟踪单位阶跃参考输入信号。
设有
x (t)
令上述两个特征方程式的对应项系数相等,
解得
k1=-5,k2=7.83,k3=1.09
或者 k1=-5,k2=2.17,k3=3.91
则由式(9-419)得到内模控制律为
t
u(t) 5 0 e( )d 7.83x1(t) 1.09x2 (t)
相应的单位阶跃输入内模控制系统的结构图
如图9-44所示。
2020年7月29日
17
要求系统输出能以零稳态误差跟踪单位阶跃参考输入信号。
1.09
控制系统状态空间设计
设计实例
内模控制器 自动检测系统
2020年7月29日
2
例9-43 内模控制器 在许多实际场合,状态变量反馈方法并
不是一种改善系统性能的实用方法。其主要 原因为:
其一,状态变量反馈往往要求用具有无 限带宽的PD控制器或PID控制器来实现,但 实际部件和控制器都只有有限的带宽;
其二,实际应用中通常无法测量和反馈 所有的状态变量,除了设置状态观测器以外, 实用的状态反馈综合装置只能依赖于系统的 输出、输入和少量的可测量的状态变量,从 而影响系统综合的效果。
(s 1 j)(s 1 j)(s 10)
s3 12s2 22s 20
0
2020年7月29日
15
要求系统输出能以零稳态误差跟踪单位阶跃参考输入信号。
e 0 1 0 0
e
z1
0
0
1
1k1
k2
k3
z1
z2 0 2 2 2
z2
而实际特征方程为
s det k1
2k1
1 s k2 2(1 k2 )
0
k3 1
s 2 2k3
s3 (k2 2k3 2)s2 (k1 2k2k3)s 4k1
0
2020年7月29日
16
要求系统输出能以零稳态误差跟踪单位阶跃参考输入信号。
s3 12s2 22s 20 0
s3 (k2 2k3 2)s2 (k1 2k2k3)s 4k1 0
2020年7月29日
4
设单输入-单输出系统的状态空间表达式为
x (t) Ax(t) bu(t)
y(t) cx(t)
其中,x∈Rn为状态向量,u为标量输入,y 为标量输出,A、b和c维数适当。
生成参考输入信号r(t)的线性系统为
xr (t) Ar xr (t)
r(t) dr xr (t)
其中,初始条件未知。
2020年7月29日
7
e(t) y(t) cx(t) z(t) Az(t) bw(t)
则式(9-414)与式(9-415)构成如下增广系统方程
e z
0 0
c
A
e z
b0w
当增广系统可控时,即
0 cb cAb cAn2b
rank b Ab
A2b
An1b
n1
2020年7月29日
2020年7月29日
3
内模控制器是另一类校正控制器,能以 零稳态误差渐近跟踪各类参考输入信号,如 阶跃信号、斜坡信号及正弦信号等。众所周 知,在经典控制理论中,对于阶跃输入信号, Ⅰ型系统可以实现零稳态误差跟踪。如果在 校正控制器中引入参考输入的内模,则可以 在状态空间设计法中推广这一结论。采用类 似的内模控制器方法,可以在更多的情况下 实现零稳态误差跟踪。
0 2
1
1
2 x(t) 2u(t)
y(t) 1 0x(t)
要求系统输出能以零稳态误差跟踪单位 阶跃参考输入信号。
2020年7月29日
12
要求系统输出能以零稳态误差跟踪单位阶跃参考输入信号。
由式(9-416)
e z
0 0
c
A
e z
b0w
知增广系统方程为
e z
0 0 0
1 0 2
0
0
1
2
对式(9-418)求积分,可得系统内部的反馈
控制信号为
t
u(t)
k1
e( )d
0
k2 x(t)
与此对应的框图模型如图9-43所示。
R(s) +
-
e
k1
1s-
u 对象G(s)
Y(s)
1
s2 2s 2
x
k2
图9-43 阶跃输入的内模设计
2020年7月29日
10
R(s) +
-
e
k1
1-
s-
u 对象G(s)
8
当增广系统可控时,即
0 cb cAb cAn2b
rank b Ab
A2b
An1b
n1
总可以找到反馈信号
w(t) k1e(t) k2z(t)
使该系统渐近稳定。这表明跟踪误差e(t)是 渐近稳定的,因此系统输出能以零稳态误 差跟踪参考输入信号。
2020年7月29日
9
w(t) k1e(t) k2z(t)
或等价为
r(t) 0
2020年7月29日
6
定义跟踪误差
e(t) r(t) y(t)
于是有
e(t) y(t) cx(t)
现在,引入两个中间变量z(t)和w(t),其 定义为:
z(t) x(t),w(t) u(t) 故有 z(t) x(t) Ax(t) bu(t)
Az(t) bw(t)
e 0 1 0 0
e
z1
0
0
1
1k1
k2
k3
z1
z2 0 2 2 2
z2
2020年7月29日
14
要求系统输出能以零稳态误差跟踪单位阶跃参考输入信号。
e 0 1 0 0
e
z1
0
0
1
1k1
k2
k3
z1
z2 0 2 2 2
z2
如果要求闭环极点为s1,2=-1±j,s3=-10,则希 望特征方程为
2020年7月29日
5
此外,参考输入r(t)的生成系统也可以等 效为
r (n) (t) n1r (n1) (t) n2r (n2) (t)
1r(t) 0r(t)
首先考虑参考输入r(t)为单位阶跃信号时
的内模控制器设计。此时,r(t)可由下列方程
生成:
xr (t) 0,r(t) xr (t)
e z
1w 2
由于可控性矩阵
0 1 2
0 cb cAb
rank b Ab
A2b
满秩,增广系统可控,
rank
1 2
2 6
6 3 8
2020年7月29日
13
要求系统输出能以零稳态误差跟踪单位阶跃参考输入信号。
故通过状态反馈
e
w
k
z
k1e
Байду номын сангаас
k2
z1
k3
z2
式中k=[k1 k2 k3],可任意配置闭环增广系统 的极点。