第七章 飞行程序
飞行程序设计9(ILS精密进近)
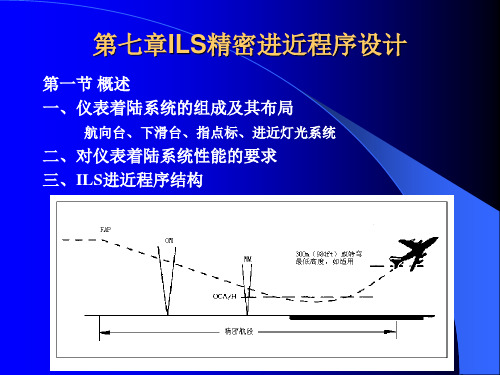
第七章ILS精密进近程序设计
2. OAS面的组成及其表达式 :Z=AX+BY+C 3. OAS常数及修正 修正航空器尺寸 修正ILS基准高 Ⅰ类航向台航道波束在入口的宽度大于 210 米时,必 须使用碰撞危险模式(CRM)来评价障碍物。
第七章ILS精密进近程序设计
第三节 确定精密航段的最低超障高(OCHPS) 一、计算精密航段的OCHPS 1. 评价障碍物,找出穿透障碍物 2. 区分进近障碍物和复飞障碍物 3. 计算复飞障碍物当量高
hmactgZ X 900 ha ctgZ ctg
4. 计算OCHPS值 OCHPS=(hO+HL)1m
第七章ILS精密进近程序设计
高度损失/高度表余度(HL)
航空器分类(Vat)
A— 169km/h(90kt) B—223km/h(120kt) C—260km/h(140kt) D—306km/h(165kt) 用于无线电高度表的余度 用于气压高度表的余度 m 13 18 22 26 ft 42 59 71 85 m 40 43 46 49 ft 130 142 150 161
第七章ILS精密进近程序设计
三、使用OAS面评价障碍物
1. OAS面的标准条件 a)航空机的尺寸:最大半翼展(S)30米;着陆轮 和GP天线飞行路线之间的垂直距离(t)为6米。 b)Ⅱ类ILS进近的飞行使用飞行指引仪。 c)复飞上升梯度2.5%。 d)ILS航道波束在入口的宽度为210米。 e)ILS基准高(RDH)为15米(49英尺〕。 f)下滑角:最小2.5°;最佳3.0°;最大3.5°。 g)所有障碍物的高以跑道入口标高为基准。 h)Ⅱ类和Ⅲ类飞行时,附件14的内进近面、内过渡面 和复飞面没有穿透。
第七章ILS精密进近程序设计
飞行程序设计大纲

《飞行程序设计》课程考试大纲课程名称:《飞行程序设计》课程代码:0800第一部分课程性质与目标一、课程性质与特点《飞行程序设计》是高等教育自学考试交通运输专业独立本科段的一门专业课,是本专业学生学习和掌握空域规划和设计基本理论和方法的课程。
设置本课程的目的是使学生从理论和实践上掌握以NDB、VOR、ILS等设备作为航迹引导设备时,离场程序、进场程序、进近程序、复飞程序和等待程序,以及航路的设计原理和方法。
通过对本课程的学习,使学生熟练掌握目视与仪表飞行程序设计的有关知识,使之能独立完成有关机场的飞行程序设计和优化调整。
二、课程设置目的与基本要求了解飞行程序的总体结构、设计方法;了解飞行程序的分类原则;掌握飞行程序设计的基本准则;能够独立完成有关机场的飞行程序设计和优化调整。
本课程的基本要求如下:1.了解飞行程序的基本结构和基本概念。
2.了解终端区内定位点的定位方法、定位容差和定位的有关限制。
3.了解离场程序的基本概念,掌握直线离场、指定高度转弯离场、指定点转弯离场和全向离场的航迹设计准则、保护区的确定方法、超障余度和最小净爬升梯度的计算方法,以及相应的调整方法;4.掌握航路设计的国际民航组织标准和我国的标准;5.掌握进近程序各个航段的航迹设置准则;6.掌握各种情况下,进近程序各个航段保护区的确定原则;7.掌握进近程序各个航段超障余度和超障高度的计算方法;8.掌握进近各个航段下降梯度的规定,以及梯度超过标准时的调整方法。
9.掌握基线转弯程序的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;10.掌握直角航线的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;11.掌握ILS进近的基本概念,精密航段障碍物评价方法,以及超障高度的计算方法;12.了解等待程序的基本概念,掌握保护区的确定方法,以及超障余度和超障高度的计算方法;13.了解区域导航程序设计的基本概念。
飞行程序设计-第7章-转弯离场

H max = ( d r + d 0 ) PDG + H − MOC
d0 = 障碍物到K-K线的最小距离 dr = 从DER到K-K线的水平距离(最早TP) PDG = 公布的程序设计梯度 H = OIS面在DER的高(5m) 超障余度:
MOC = max {90 m, 0.008 ( d r + d 0 )}
中国民航大学空中交通管理学院
转弯点由DME弧确定的指定点转弯离场
中国民航大学空中交通管理学院
2.保护区的画法
转弯点之前(同直线离场) 转弯点之后 转弯内侧: 起始于转弯点定位容差的最早位置,K-K线 转弯外侧: 起始于转弯点定位容差最晚位置+C容差,C=(TAS+W) ×6, S-S线
中国民航大学空中交通管理学院
中国民航大学空中交通管理学院
航空 器分 类
速度 单位
vat ﹤169 ﹤91 169/223 91/120 224/260 121/140 261/306 141/165 307/390 166/210
起始进近 速度范围
最后进近 速度范围
目视机动 (盘旋) 最大速度
复飞最大速度
中间
最后
A B C
km/h kt km/h kt km/h kt km/h kt km/h kt
中国民航大学空中交通管理学院
3.超障余度
(1)转弯起始区内障碍物高度要求: 转弯起始区内最小超障余度用从DER沿标称航迹量取的水 平距离,按设计的PDG进行计算。 按正常的性能,在转弯起始区结束时,航空器能够达到转 弯高度(TNA)。因此,在转弯起始区内所有障碍物之上 也必须满足转弯最小超障余度的要求。 转弯起始区内最高障碍物的标高应≤ TNA-90m。
2.8_等待航空器的管制

四、等待的指示
1、应在航空器到达管制界限点或定位点前 5分钟发出:
(1)等待定位点; (2)等待航线与等待点的方位关系; (3)飞往等待定位点的航路或航线及所使用的 导航设施的径向线、航向、方位; (4)出航界限; (5)等待航线的转弯方向;
2、用语:请在〔定位点〕的〔方向〕,沿 〔径向线、航向、方位、航路或航线〕 出航〔数值〕分钟/公里(海里)左转弯 /(右转弯)进行等待。
6、飞行员应根据风的情况对航向和时间进 行修正,应充分利用DME弧和径向方位线 掌握距离和位置; 7、得到脱离等指示,应在规定的等待程序 内调整航线,按规定脱离 8、当航路飞行的航空器距离等待区的保护 区应有5′以上的间隔; 9、等待的航空器,必须严格保持规定的高 度层,按照规定的等待航线飞行。 10、一个等待高度层,只允许有一架飞机进 行等待。
第七章 等待航空器的管制
一、等待飞行程序
1、等待和进入等待航线必须按照有关空中 交通服务当局的规定并在《航行资料汇 编》中公布的程序执行。 2、进入和等待程序尚未公布或机长不知道 该程序,管制单位必须说明。 3、必须在指定的位置点等待,且必须按照 规定为与其他航空器之间的安全间隔。
4、右等待为标准等待, 等待定位点是电台 (NDB/VOR)或VOR/DME定位点、VOR交叉定位点。
5、400m以下,每隔300m为一个等待高度层; 8400m以上,每隔600m为一个等待高度层。 6、模拟武汉机场在QU、XG、WG及四个走廊 上空设有等待程序。其中,WG与XG上空 不允许同时两架飞机在同一高度进行等 待。
三、等待飞行的有关规定
1、指示空速应等于或小于表中所列数值。 等待过程中,不允许调速; 2、25°或3°/s对应的坡度,以小者为准; 3、标准为右等待,除非有特殊规定; 4、飞机出航航段的静风飞行时间,4250m 或以下1′;以上为1.5′; 5、出航计时是从正切等待点开始
51、民用机场飞行程序和运行最低标准管理规定

民用机场飞行程序和运行最低标准管理规定目 录第一章 总则第二章 飞行程序设计和运行最低标准拟定第三章 飞行程序和运行最低标准的批准、校验、试飞和公布第四章 飞行程序和运行最低标准的使用和维护第五章 飞行程序设计人员和单位的管理第六章 监督检查第七章 法律责任第八章 附则第一章 总 则第一条 为了保障民用航空器的飞行运行安全,规范民用机场飞行程序和运行最低标准的管理工作,根据《中华人民共和国民用航空法》、《中华人民共和国飞行基本规则》和《民用机场管理条例》,制定本规定。
第二条 本规定适用于中华人民共和国境内民用机场(含军民合用机场的民用部分)飞行程序设计和运行最低标准拟定、批准、使用、维护,以及与飞行程序和运行最低标准相关的航行服务研究活动。
第三条 本规定中的飞行程序,是指为航空器在机场区域运行所规定的、按顺序进行的一系列机动飞行的要求,如飞行区域、航迹、高度、速度的规定和限制等,一般包括起飞离场程序、进场程序、进近程序、复飞程序和等待程序等,分为仪表飞行程序和目视飞行程序两类。
仪表飞行程序包括传统导航飞行程序和基于性能导航(PBN)飞行程序。
机场运行最低标准,是指机场可用于起飞和进近着陆的运行限制,包括能见度(VIS)、跑道视程(RVR)、最低下降高度/高(MDA/H)、决断高度/高(DA/H)、云底高等。
第四条 运输机场应当建立仪表飞行程序,根据需要建立目视飞行程序。
通用机场可以建立仪表或者目视飞行程序。
第五条 中国民用航空局(以下简称民航局)负责全国民用机场飞行程序和运行最低标准的监督管理,制定相关政策和技术标准,对飞行程序设计人员和单位实施管理。
第六条 中国民用航空地区管理局(以下简称地区管理局)负责本辖区内民用机场飞行程序和运行最低标准的批准和管理,组织机场试飞,监督检查实施情况,具体负责飞行程序设计人员和单位的日常监管。
第七条 机场管理机构负责机场飞行程序设计和运行最低标准拟定、修改、优化、维护及报批工作。
飞行程序设计7(基线转弯)

f)平均转弯坡度(α):25°。 g)平均转弯率(R):根据平均转弯坡度计算而得,但
不得超过3°/秒。 h)定位容差:根据导航设备类型及程序起始高度(H)
确定。 i)飞行技术容差:包括
驾驶员反映时间:0至6秒; 建立坡度时间:5秒; 出航计时容差:±10秒; 导航设备航迹引导容差
c)转弯半径(r) r = 180V(m/s)/(πR)= 180×79.78/(3.1416×3) = 1524m
第五章 非精密反向程序设计
d)计算出航边标称长度(L) L = V×t =79.78×1.5×60 = 7180m
e)出航边与入航边得夹角ψ ψ= 2arctg(r/L)= 2arctg(1524/7180)= 24°
a
28Km 28Km
第五章 非精密反向程序设计
基线转弯程序中,中间进近航段超障余度的规定以及超障 高度的计算与直线进近程序中中间进近航段相同。
3.计算出航时间
a)确定程序起始点、入航边的航向和程序起始高(HIAF) b)根据入航边的航向,画出中间进近保护区
c)利用中间进近保护区,根据障碍物的数据或地形图, 计算出中间进近超障高(OCH中) d)通过下列公式,初步计算出航时间:
四、最后进近航段 1.当基线转弯所用导航台在机场外,跑道中线延长线上时 2.当基线转弯所用导航台在机场,入航边为最后进近航段 a)保护区
b)超障余度
这时,最后进近航段主区的超障余度为90m
c)下降梯度
航空器类型
下降率
最小
最大
A、B 120m/min(394ft/min) 200m/min(655ft/min) C、D、E 180m/min(590ft/min) 305m/min(1000ft/min)
《民用机场飞行程序管理规定》(送审稿)
民用机场飞行程序管理规定(送审稿)目 录第一章 总 则 (1)第二章 飞行程序设计 (3)第一节 基本要求 (3)第二节 新建、改建和扩建机场飞行程序设计 (4)第三节 飞行程序的修改和优化 (7)第三章 飞行程序的审核、批准和公布 (9)第四章 飞行程序的飞行校验 (12)第五章 飞行程序的使用和维护 (13)第六章 飞行程序设计人员的资质和培训 (15)第七章 法律责任 (17)第八章 附则 (18)第一章总则第一条为了保障民用航空器的运行安全,规范民用机场的飞行程序管理工作,根据《中华人民共和国民用航空法》和《中华人民共和国飞行基本规则》,制定本规定。
第二条本规定适用于我国民用机场(含军民合用机场的民用部分)飞行程序的设计、审核、批准、使用及相关活动。
从事民用机场飞行程序相关活动的单位及个人应当遵守本规定。
第三条本规定所称民用机场飞行程序(以下简称飞行程序)是为航空器在机场起飞和着陆所规定的按顺序进行的一系列飞行过程,包括起飞离场程序、进场程序、进近程序,必要时还可以包括复飞程序和等待程序。
飞行程序分为目视飞行程序和仪表飞行程序。
第四条飞行程序是机场运行的基本条件之一,是组织实施飞行、提供空中交通服务、建设导航设施的重要依据,是航空器飞行安全和提高运行效率的重要保障。
第五条民用运输机场应当建立仪表飞行程序,并且根据需要建立目视飞行程序。
通用机场(含临时机场和临时起降点)可以根据需要建立仪表或者目视飞行程序。
第六条中国民用航空总局(以下简称民航总局)负责对民用机场飞行程序及其相关活动进行统一管理,制定飞行程序设计规范;负责飞行程序设计人员的资质管理;对飞行程序的实施情况进行监督检查。
民航总局空中交通管理局(以下简称总局空管局)具体承办民用机场飞行程序的管理工作,拟制飞行程序技术规范和管理规定,批准飞行程序、办理飞行程序资格证管理和人员培训的具体事宜。
第七条民航地区管理局(以下简称地区管理局)负责本辖区内民用机场的飞行程序管理,审核、上报民用运输机场的飞行程序;审核、批准通用机场飞行程序;组织飞行程序的飞行校验组织本地区飞行程序相关培训;对本地区飞行程序的实施情况进行监督检查。
飞行程序的设计9(ILS精密进近)课件
4. 计算OCHPS值 OCHPS=( hO+HL)↑1m
第七章ILS精密进近程序设计
高度损失/高度表余度(HL)
航空器分类(Vat)
A— 169km/h(90kt) B—223km/h(120kt) C—260km/h(140kt) D—306km/h(165kt)
75m
第七章ILS精密进近程序设计
三、使用OAS面评价障碍物
1. OAS面的标准条件 a)航空机的尺寸:最大半翼展(S)30米;着陆轮
和GP天线飞行路线之间的垂直距离(t)为6米。 b)Ⅱ类ILS进近的飞行使用飞行指引仪。 c)复飞上升梯度2.5%。 d)ILS航道波束在入口的宽度为210米。 e. ILS基准高(RDH)为15米(49英尺〕。 f)下滑角:最小2.5°;最佳3.0°;最大3.5°。 g. 所有障碍物的高以跑道入口标高为基准。 h.Ⅱ类和Ⅲ 类飞行时,附件14的内进近面、内过渡面和 复飞面没有穿透。
第七章ILS精密进近程序设计
遇下列情况时,表列的数值应予以修正: a)机场标高大于900 米( 2953 英尺)时,每300 米应增 加无线电高度表余度的2%; b)下滑角大于3.2°时,每大出0.1°应增加无线电高度表余 度的5%。
第七章ILS精密进近程序设计
第四节 起始进近航段
与非精密直线进近的区别: 起始进近航迹与中间航迹的交角不应超过90° 第五节 中间进近航段
C/D类航空器
2.8km(1.5NM) 3.7km(2.0NM) 4.6km(2.5NM) 5.6km(3.0NM)
第七章ILSILS精密进近程序 设计精密进近程序设计
07章-机场空域规划
第七章机场空域规划第七章机场空域规划7.1 空域规划7.1.1 空域现状一、深圳机场所属空域的范围深圳机场空域位于广州飞行情报区/珠海终端管制区内,进出港飞机由珠海进近管制中心负责在该区域内统一调配和指挥。
管制高度:标准海平面气压3600m或以下。
二、空域特点深圳宝安机场位于珠海终端区内,其进离场由珠海进近管制中心负责在该区域内统一调配和指挥。
珠江三角洲地区空域狭窄,南北长约40-60km,东西宽180km,机动空域有限。
机场跑道南端距香港情报区边界23km,北端距珠海终端区现行北侧边界仅22km(广州新机场启用后,距边界距离扩大至29km)。
机场南、北两端受香港国际机场、白云国际机场和军航岑村机场飞行活动的制约,南北方向上的飞行活动受到限制,进、离场飞行主要集中在东、西狭长的空域内。
区内各机场进离场航线密集,上升、下降地带重叠,飞行冲突大,飞行活动因受军方和相邻机场的限制又主要集中在平洲至连胜围以东和石龙至BEKOL以西的狭小空域范围内,给飞行调配带来相当大的难度,同时也给空域规划和飞行程序设计带来相当大的困难。
因此,合理地规划香港、深圳、广州三大国际机场的飞行空域将是今后我们面临的一个重大课题。
深圳机场与各机场飞行关系具体分析如下:1、深圳宝安机场与广州白云机场飞行关系分析广州白云机场位于深圳宝安机场325度方位、距离82km。
广州白云机场和深圳宝安机场是珠江三角洲内最繁忙的机场,它们对空域的需求构成了两大机场的进离场航线相互渗透和制约的矛盾。
首先,在航班的走向上,两个机场飞往西南、中南(北部)、华北、华东的离场航班共用相同的出口,飞越广州白云机场侧方时与白云机场的进离场航线交叉重叠,随着飞行流量的增加,调配难度加大;在飞行繁忙时段,由于航路和扇区容量限制,需要控制飞行流量,导致广州白云、深圳宝安等机场航班地面等待放行的情况时常发生。
其次,飞往深圳宝安机场的进场航班65%要飞经广州白云机场侧方,与广州白云机场的进离场航线交叉、重叠,随着飞行流量的增加,因广州进近容量和飞行调配的需要,进港航班空中延误的可能性在增加;同时,由于空域狭小,由深圳机场北面进港的航班只有一个入口进入珠海终端管制区(临时航路关闭时),在进场流量大时,对进场航班构成制约。
飞行程序设计
飞行程序设计概述飞行程序设计是指为飞行器编写程序,控制其飞行行为和执行任务。
飞行程序设计涉及到飞行器的导航、自动驾驶、飞行模式切换等功能,是飞行器能够完成各种任务的重要组成部分。
飞行程序设计原则在进行飞行程序设计时,需要遵循一些基本原则,以确保飞行器的安全和性能。
1. 模块化设计:将飞行程序分解为多个模块,每个模块负责完成特定的功能。
这样做可以提高程序的可维护性和可扩展性。
2. 容错设计:在程序中引入适当的容错机制,以应对可能出现的意外情况,如传感器故障、通信中断等。
容错设计可以增加飞行器的鲁棒性。
3. 优化算法:使用高效的算法来处理飞行器的导航和控制问题,以提高飞行器的性能和响应速度。
4. 人机交互设计:考虑到飞行程序的操作性和可用性,设计人机界面,使操作员可以方便地进行程序的设置和调整。
飞行程序设计流程飞行程序设计通常包括以下几个步骤:1. 需求分析:明确飞行器的任务和功能需求,确定需要实现的飞行程序功能。
2. 界面设计:设计人机界面,使操作员可以方便地进行程序的设置和调整。
3. 算法设计:设计飞行控制算法和导航算法,用于控制飞行器的姿态和路径。
4. 模块设计:将飞行程序分解为多个模块,并对每个模块进行详细设计。
5. 编码实现:根据设计完成对应的编码工作,实现飞行程序。
6. 调试优化:进行系统调试和优化工作,确保飞行程序的正确性和稳定性。
7. 测试验证:对飞行程序进行全面的测试验证,确保程序能够按照预期完成飞行任务。
飞行程序设计工具进行飞行程序设计时,可以使用一些专门的工具来辅助开发工作。
1. 集成开发环境(IDE):使用IDE可以提供代码编辑、调试、编译和运行等一体化的开发环境,提高开发效率。
2. 仿真工具:仿真工具可以模拟飞行器的运行环境,帮助进行飞行程序的调试和测试。
3. 数据分析工具:使用数据分析工具对飞行器的传感器数据和飞行记录进行分析,以评估飞行程序的性能和稳定性。
飞行程序设计的挑战飞行程序设计面临一些挑战,需要解决一些问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ⅰ扇区的加入--平行加入
MC出
MC入
飞机到达定位点后,转至出航航向飞行适当时
间,然后左转(右程序)或右转(左程序)切 入入航航迹 向台飞行,二次过台后作正常转弯 加入直角程序。
Ⅱ扇区的加入--偏置加入
MC出
30°
飞机到达定位点后,向程序一侧转弯,与入航
航迹成30°偏置飞行一定时间,然后转弯切入 入航航迹向台飞行,二次飞跃定位点后,作正 常转弯加入直角程序。
直角航线的实施程序
进场航段 分解风
加入 直角程序
对风的修正
对无线电方位及RD的修正
• 对于无线电方位的修正主要是RB切和RB入,因
为在出航边修正了偏流,因此, RB切和RB入在 有风条件下应相应的增大或减小一个偏流角。
• 由于在出航边用时间修正了WS1的影响,因此,
RD修正为:RD应=(HIAF-H入)/t应
仪表进近程序概述
仪表进近程序是航空器根据飞行仪表和对障 碍物保持规定的超障余度所进行的一系列预定的 机动飞行。
仪表进近程序的分类--根据最后进近航段划分
• 精密进近--ILS和PAR; • 非精密进近--NDB、VOR、NDB/VOR结合DME、
ILS下滑台不工作
仪表进近程序的结构---五个航段
进场航段
注:副区的超障余度逐渐递减为零。
下降梯度或下降率
• 下降梯度(Gr):指飞机在下降时的高距
比,用百分比表示。
• 仪表进近各航段的下降梯度:起始航段,
最佳4%,最大8%;中间航段,最佳0%, 最大5%;最后航段,最佳5%,最大6.5%。
• 对于反向和直角程序,不同类别的飞机出
航和入航的实际航迹长度不同,因此用最 大下降率进行限制。
• 实际使用:
TAS≥170Kt(315Km/h), α取25 °; TAS<170Kt(315Km/h),用ω3°/s对应的坡 度转弯。
最小超障余度(MOC)
• 起始进近航段,主区300m; • 中间进近航段,主区150m; • 最后进近航段,非精密进近有FAF为75m,
无FAF为90m;精密进近用高度表余度或 高度损失代替。
TAS
α 用红色坡度
例:进近转弯中空速为180kt,坡度为25°,计 算出的转弯半径为
1.02NM
直角航线程序的构成
MC入
出航 转弯
IAF
MC出
入航 转弯
开始点是一个导航台或定位点,由出航转弯、出航航段(MC 出)、入航转弯、入航航段(MC入)构成。
t出规定:1~3分钟,以0.5分钟为增量;中国民航按A/B类和C/D 类飞机予以公布。
Ⅲ扇区的加入--直接加入
MC入
飞机到达定位点后,直接转至出航航迹方向, 加入直角航线程序。对于这种加入方法,应注 意根据飞机的实际进入方位控制进入时可能造 成的偏差。
等待程序的特点
• 直角程序在大、中型机场用作等待程序,
右等待为标准等待,左等待为非标准等 待。
• 等待程序的t出规定为:14000英尺以下1
(修正角程序)
程序转弯
IAF MC入
S型程序 U型程序
VOR/NDB IF
VOR/NDB IF
类别 A B C D E
仪表进近飞机分类表
Vat(Kt)
机
型
<91 双水獭、TB20、运5、运12等
91~120 夏延ⅢA、运7、空中国王、安24 等
121~140 A310-200(300)、B737、B757、MD82、伊尔76等
出航计时的规定:开始点为电台时,从转至出航航向或正切电台 时开始,以晚到为准;开始点为定位点时,从转至出航航向开始 计时。
直角航线程序的无风数据
--仪表进近图公布的数据
360° IAF
(900)
(340)
180°
(550)
一个时间:t出,根据所飞 机型读取;
两个航迹:MC入和MC出;
三个高度:起始进近高度、 入航转弯高度、第二次 过台的高度。
仪表进近图公布的无风数据
290°
(900) (200)
(500)
一个时间——出航时间t出; 两个航迹——出航航迹MC出、入航航迹MC入; 三个高度——起始进近高度、入航转弯高度、
第二次过台高度。
修正角航线的加入方法
航线加入:扇区划分
Ⅰ扇区平行加入、Ⅱ扇区偏置加入、Ⅲ扇区直接加入
Ⅰ扇区
110° MC入 Ⅱ扇区
MC出 Ⅲ扇区
用RMI和HSI进行直观判断
Ⅰ扇区
E 12
Ⅲ扇右)手法则直观判断
左(右)手法则为仪表法的间接使 用,左程序用左手,右程序用右手, 两手的拇指、食指和中指分别对应 仪表扇区的三个边界构成三个扇区, 食指代表飞机的航向,根据MC出所 在的扇区加入。
分钟,以上1.5分钟。
• 等待程序对风的修正基本原理和直角程
序相同,只是在出航边上将出航转弯、 出航和入航转弯时WS2的影响一起修正, 对于WS1的影响,也是采用多飞或少飞 一定时间的方法进行修正。
修正角航线的构成
MC入
MC出
φ IAF
入航转弯
• 出航时间的规定:计时从IAF点(必须是
一个导航台)开始,1到3分钟,以0.5分 钟为增量,根据飞机分类(A/B、C/D) 分别予以公布。
141~165 B747-200(400)、B767-300、MD11等
166~210 暂无
•着陆入口速度Vat :某型飞机在着陆形态
下以最大允许着陆重量着陆时失速速度的1.3倍, 即Vat=1.3Vs。
转弯坡度或转弯率
• 飞机转弯要求:用标准转弯率ω3°/s对应的坡度
转弯,但是一般等待和起始进近平均坡度α≤25 °,目视盘旋α≤20°, 复飞α≤15 °。
转弯诸元计算:速度为Km/h的计算尺型
转弯角度
10 ω
第一组
ω
转弯半径用米作单
θ
位,尺上的数据应
乘以10。
TAS
TAS R/10 tθ
α
例:进近转弯中用标准转弯率,空速为250KM/h, 转弯半径为
1320米
转弯诸元计算:速度为Kt时的计算尺型
转弯角度
10 ω
第一组
ω
θ TAS 100R
tθ
转弯半径用Nm作单 位,尺上的数据应 除以100。
起始进 近航段
VOR/NDB IAF
中间进 近航段
最后进 近航段
复飞航段
IF
FAF
MAPt
跑道
仪表进近程序的四种基本型式 --根据起始进近航段划分
•直线或DME弧程序 •直角程序 •反向程序 •推测航迹程序
直线
IF IAF
DME弧
IAF
IF
MC出
右程序
IAF
MC入
IAF
MC入
左程序
MC出
基线转弯