信号检测与估计课后习题
《信号检测与估计》第九章习题解答

T x 2 (t )dt −2 A
0
Tx(t
0
)sin
(ω
0
t
+θ
)dt
+
A
2
T 0
sin
2
(ω
0
t
+θ
)dt
⎟⎞ ⎠
由于 ∫0Tsin 2 (ω0t
+ θ )dt
=
1 2
∫0T(1 − cos 2(ω0t
+ θ ))dt
=
T 2
,得到
( ) ∫ ∫ f
x A,θ
−1
= Fe N0
T x 2 (t )dt 2 A
ω0
ω0
s(t
)
=
⎪ ⎨
A
⎪
⎪ ⎪⎩
A(1
+
cos
ω0t)
− 2mπ < t ≤ 2mπ
ω0 2mπ
<t
≤
(2ωm0 +1)π
ω0
ω0
试证明时延τ
的无偏估计量的方差为
σ
2 τˆ
≥
3 + 4m
(2E / N0 )ω02
。其中 E 为信号能量。
解:略
9.4 接收信号 x(t) = s(t) + n(t),s(t)的到达有时延τ ,求时延τ 的无偏估计量τˆ 的最小方差。其中 n(t)
⎤ ⎥⎦
∫ ∫ ∫ ∫ [ ] = 4
N
2 0
T / 2 ∂s(t −τ )
−T / 2 ∂τ
T /2
E
−T / 2
n(t )n(u )
∂s(u −τ ) dudt
《信号估值与检测》习题

1. 令观测样本由1(,....)i ix s w i n =+=给出,其中{}i w 是一高斯白噪声,其均值为零,方差为1。
假定s的先验概率密度为22())s f a a =-试用平方和均匀代价函数分别求s 的贝叶斯估计。
解:2()(|))2i i x s p x s -=-,1,...,i n =222111()()1(|)(|))()exp()222n n n ni ii i i i x s x s p s p x s π===--==-=-∑∏x且12221()()exp(2)2p s s s π=-=-(1) 采用平方代价函数,相应贝叶斯估计为最小均方误差估计mse s[|](|)mse sE s sp s ds +∞-∞==⎰x x21222121221222112221112()(|)()111(|)()exp()()exp(2)()()222()11()exp(2)()22(2)11()exp()()22(1)211()exp()exp(()22n ni i n ni i nn ii i nn i i i i x s p s p s p s s p p x s s p xx s s s p x n s x s p πππππ=+=+=+==-==---=---++=-+-=--∑∑∑∑x x x x x x x 221112222211112)2(1)(2)111()exp()exp()()222()(())1111()exp()exp()1()222(1)nnnin ii i nnni i n ii i i x xn s s n p x x x s n n p n ππ+==+===+-+=----++--+∑∑∑∑∑∑x x 分析(|)p s x ,发现其为高斯型的;而mse s为其条件均值,因此可以直接得到 1()1ni mse i x s n ==+∑ (2) 采用均方代价函数,相应贝叶斯估计为最大后验估计map sln((|))|0map p s s ss∂==∂x ,也即满足 ln((|))ln(())[]|0map p s p s ss s∂∂+==∂∂x x 故有1()0nmapmap ii x ss=--=∑ 所以111n map i i s x n ==+∑2. 设观测到的信号为x n =θ+其中n 是方差为2n σ、均值为零的高斯白噪声。
《信号检测与估计》第十章习题解答

《信号检测与估计》第十章习题解答10.1 设线性滤波器的输入信号为()()()t n t s t x +=,其中()[]0E =t s ,()[]0E =t n ,并且已知()ττ-e =S R ,()ττ-2e=N R ,()0=τsn R ,求因果连续维纳滤波器的传递函数。
解:连续维纳滤波器与离散维纳滤波器的形式是相同的,即()()()()+⎦⎤⎢⎣⎡−⋅⋅=s B s P s B s H xs w112opt σ 因此需要求解()t s 的复功率谱和()t x 的时间信号模型。
考虑到信号与噪声不相关,因此观测数据的功率谱就等于信号的复功率谱加上噪声的复功率谱。
对观测数据的复功率谱进行谱分解,就可以得到()t x 的时间信号模型。
()t s 的复功率谱为()()()20s -10s 1-s --121111e e e e s s s d d d s P S −=−++=+==∫∫∫∞−+∞++∞∞−τττττττ ()t n 的复功率谱为()2s -2-44e es d s P N −==∫+∞∞−τττ因此,观测数据的复功率谱为()()()()()()()()()s s s s ss ss s P s P s P N S X −+−++=−+−=+=2211-226441122 取12=w σ()()()()s s ss B +++=2126()()()()()()()()()s s s s s s s s B s P s B s P N xs +=−==1-2-262-2-1-2612--2令()()()s B s P s F xs -=,()τf 是()s F 的拉普拉斯反变换。
要求()τf 是因果的,可将s 平面右半平面的极点扔掉,()()()[]12e 61,e Re e21-s s +=−==∫τττπτs F s ds s F jf C给()τf 取因果,并做拉普拉斯变换,得到()s d s F +⋅+=⋅⋅+=∫∞++11126e e 1260s --τττ()()()()()()())()()122261112626211112opt +++=+×+×+++×=⎦⎤⎢⎣⎡−⋅⋅=+ss ss s s s B s P s B s H xs wσ10.2 设已知()()()n n n s n x +=,以及()()()z z z G S 4.014.0192.01−−=−,()1=z G N ,()0=z G sn ()n s 和()n n 不相关。
信号检测与估计理论第一章习题讲解

1-9 已知随机变量X 的分布函数为20,0(),011,1X x F x kx x x <⎧⎪=≤≤⎨⎪>⎩求:①系数k ; ②X 落在区间(0.3,0.7)内的概率; ③随机变量X 的概率密度。
解:第①问 利用()X F x 右连续的性质 k =1 第②问{}{}{}()()0.30.70.30.70.70.30.7P X P X F P X F =<<=<≤-=-第③问 201()()0X X xx d F x f x elsedx ≤<⎧==⎨⎩1-10已知随机变量X 的概率密度为()()xX f x ke x -=-∞<<+∞(拉普拉斯分布),求:①系数k ②X 落在区间(0,1)内的概率 ③随机变量X 的分布函数 解: 第①问()112f xd x k ∞-∞==⎰ 第②问 {}()()()211221x x P x X xF x F xfx d x<≤=-=⎰ 随机变量X 落在区间12(,]x x 的概率12{}P x X x <≤就是曲线()y f x =下的曲边梯形的面积。
{}{}()()1010101112P X P X f x dxe -<<=<≤==-⎰第③问()102102xx e x f x e x -⎧≤⎪⎪=⎨⎪>⎪⎩()00()110022111010222xx xxx x x x F x f x dxe dx x ex e dx e dxx e x -∞-∞---∞=⎧⎧≤≤⎪⎪⎪⎪==⎨⎨⎪⎪+>->⎪⎪⎩⎩⎰⎰⎰⎰1-11 某繁忙的汽车站,每天有大量的汽车进出。
设每辆汽车在一天内出事故的概率为0.0001,若每天有1000辆汽车进出汽车站,问汽车站出事故的次数不小于2的概率是多少?,(01)p q λ→∞→→∞→−−−−−−−−→−−−−−−−−→−−−−−−−−→n=1n ,p 0,np=n 成立,0不成立-分布二项分布泊松分布高斯分布汽车站出事故的次数不小于2的概率()()P(2)101k P k P k ≥=-=-= 答案0.1P(2)1 1.1k e -≥=-100.1n p ≥≤实际计算中,只需满足,二项分布就趋近于泊松分布()np!k e P X k k λλλ-===1-12 已知随机变量(,)X Y 的概率密度为(34)0,0(,)0x y XY kex y f x y -+⎧>>⎪=⎨⎪⎩,,其它求:①系数k ?②(,)X Y 的分布函数?③{01,02}P X X <≤<≤?第③问 方法一:联合分布函数(,)XY F x y 性质:若任意四个实数1212,,,a a b b ,满足1212,a a b b ≤≤,则121222111221{,}(,)(,)(,)(,)XY XY XY XY P a X a b Y b F a b F a b F a b F a b <≤<≤=+--{01,02}(1,2)(0,0)(1,0)(0,2)XY XY XY XY P X Y F F F F ⇒<≤<≤=+--方法二:利用(){(,)},XY DP x y D f u v dudv∈∈⎰⎰)(210{01,02},XY P X Y f x y dxdy <≤<≤=⎰⎰1-13 已知随机变量(,)X Y 的概率密度为101,(,)0x y xf x y ⎧<<<=⎨⎩,,其它 ①求条件概率密度(|)X f x y 和(|)Y f y x ?②判断X 和Y 是否独立?给出理由。
信号检测与估计第一章课后答案
两边求微分得 =1/2 为判决门限 =
解得 =1/2值时达到极大极小化风险?
(2)根据一次观测的判决区域如何?
解:与上题求解类似得
=
=2/3
,=1/3
1.9 设两种假设为: : :
其中n(t)为零均值和功率为2的高斯白噪声。根据M个独 立样本(1,2,……,M),应用纽曼-皮尔逊准则进行检验。 令=0.05,试求:
(1) 最佳判决门限; (2) 相应的检测概率。 解:由(1-43)得似然比
将,n=M代入得
化简得
服从均值为2(下)和0(下),方差为2/M的高斯分布
从中解得 相应的
= =0.05
= 判为 (其中) 化简得到
判为 (1) 即曲线方程为
似然函数为 (k=1,0)
虚警概率
漏报概率
平均风险 =
其中为(1)式确定 1.3只用一次观测x来对下面两个假设作选择,:样本x为零均值、方差
的高斯变量,:样本x为零均值、方差的高斯变量,且>。 根据观测结果x,确定判决区域和。 画出似然比接收机框图。为真而选择了的概率如何? 解:(1)似然函数
|x|1时似然比为 判为
化简得 = 判为
所以得判决区域为
(2)应用纽曼-皮尔逊准则 所以得判决区域为
1.7 根据一次观测,用极大极小化检验对下面两个假设做判断 : :
设n(t)为零均值和功率为的高斯过程,且。试求: (1) 判决门限 (2) 与相应的各假设先验概率。
解:因为采用极大极小化准则,所以要求
(k=1,0) 似然比
判为 化简得
(>) 判为 得 根据选取准则而定 (2)框图
0 判为
<0 判为
x
信号检测与估计试题——答案(不完整版)
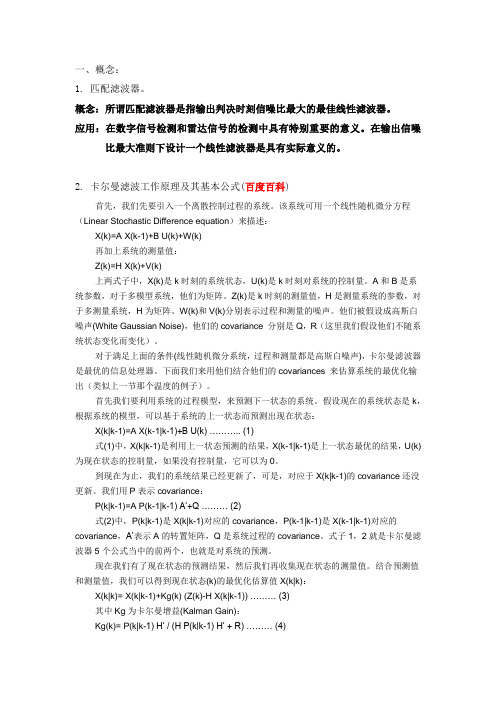
一、概念:1. 匹配滤波器。
概念:所谓匹配滤波器是指输出判决时刻信噪比最大的最佳线性滤波器。
应用:在数字信号检测和雷达信号的检测中具有特别重要的意义。
在输出信噪比最大准则下设计一个线性滤波器是具有实际意义的。
2. 卡尔曼滤波工作原理及其基本公式(百度百科)首先,我们先要引入一个离散控制过程的系统。
该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:X(k)=A X(k-1)+B U(k)+W(k)再加上系统的测量值:Z(k)=H X(k)+V(k)上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。
A和B是系统参数,对于多模型系统,他们为矩阵。
Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。
W(k)和V(k)分别表示过程和测量的噪声。
他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance 分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。
下面我们来用他们结合他们的covariances 来估算系统的最优化输出(类似上一节那个温度的例子)。
首先我们要利用系统的过程模型,来预测下一状态的系统。
假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:X(k|k-1)=A X(k-1|k-1)+B U(k) (1)式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的covariance还没更新。
我们用P表示covariance:P(k|k-1)=A P(k-1|k-1) A’+Q (2)式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。
《信号检测与估计》第十二章习题解答

《信号检测与估计》第十二章习题解答12.1 采用下式给出的有偏自相关函数的定义,并加窗,得到BT 谱估计器:()()()()()()⎪⎩⎪⎨⎧−−−−−=−+=+=∑∗1,,2,11ˆ1,,1,01ˆL L N N m m R N m m n x n x N m R X X ()⎪⎩⎪⎨⎧−≤=其它011N m m W N()()()()∑−−−=−⋅⋅=11e ˆˆN N m m j X N X m R m W G ωω证明该BT 估计器与周期图相同。
解:()()()()()()()()()()()()()()()()()211111111e 1e e 1e e 1e 1e ˆˆωωωωωωωωj N N m n m j nj N N m nj n m j N N m m j N N N m m j X N XX N m n x n x N m n x n x N m n x n x N m W m R m W G =⋅+⋅⋅=⋅⋅+=⋅⎥⎦⎤⎢⎣⎡+⋅=⋅⋅=∑∑∑∑∑∑∑−−−=+−−∗−−−=−+−∗−−−=−∗−−−=− 12.2 设自相关函数()3,2,1,0,==m m R m X ρ。
试用Levinson-Durbin 递推法求解AR (3)模型参量。
解: ()()ρ−=−=0111X X R R a 110=a()()221121101ρσ−=⋅−=X R a ()()012211122=+−=σX X R a R a ρ−=⋅+=11221121a a a a ()2212222211ρσσ−=⋅−=a因此模型为一阶 ()()[]()012322222133=⋅+−=σX X X R a R a R a021332232=⋅+=a a a aρ−=⋅+=22332131a a a a()2222332311ρσσ−=⋅−=a 所以模型为()()()n w n x n x +−=1ρ12.3 设5=N 的数据记录为:10=x ,21=x ,32=x ,43=x ,54=x ,AR 模型的阶数3=p 试用Levinson-Durbin 递推法求模型参量。
信号检测习题

E(l | H0 ) E[ xk sk | H0 ] E[ nk sk ] 0
k 1
k 1
N
N
N
V ar(l | H0 ) E[( (xk sk | H0 ) E(l | H0 ))2] E[( nk sk )2]
s
2
k
2 n
k 1
k 1
k 1
在假设 H1,l(x)的均值和方差为
sk
N
xk sk
k 1
判决器
H1成立 H0成立
N
因为检验统计量 l(x) xk sk 是相关运算,所 k 1
以,检测器是一种相关检测器。
信号检测与估计理论——习题讲解
(3)检测性能分析
在两个假设下,检验统计量l (x)都是高斯随机变量。
在假设 H0下,l(x) 的均值和方差分别为
N
N
1
2
2 n
exp[
x12 x22
2
2 n
]
已知两次观测 统计相互独立
信号检测与估计理论——习题讲解
和 p(x | H1) p(x1, x2 | H1) p(x1 | H1) p(x2 | H1)
1( x1
s1)2 (x2
2
2 n
s2 )2
]
于是似然比检验为
信号检测与估计理论——习题讲解
信号检测与估计理论(习题课) 指导老师:张烨
信号检测与估计理论——习题讲解
3.4 考虑二元确知信号的检测问题。若两个 假设下的观测信号分别为
H0 : xk nk , k 1, 2 H1 : x1 s1 n1
x2 s2 n2
其已测中 知 相, 观 互s测 统1和噪 计s声独2为立n确k;~知设N信似号(然0,,比且门2 )满限足,为且s1两。次0, s观2 0;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、(15分)在二元信号的检测中,若两个假设下的观测信号分别为:
012
2
11
2
::H x r H x r r ==+
其中,1r 和2r 是独立同分布的高斯随机变量,均值为零,方差为1。
若似然比检测门限为η,求贝叶斯判决表示式。
解 假设0H 下,观测信号x 的概率密度函数为
1/2
201(|)exp 22x p x H π⎛⎫⎛⎫
=- ⎪ ⎪⎝⎭⎝⎭
假设1H 下,22
12x r r =+,而1
2
(0,1),(0,1)r N r N ,且相互统计独立。
大家知道,
若(0,1)k r N ,且(1,2,
,)k r k N =之间相互统计独立,则
2
1N
k k x x ==∑
是具有N 个自由度的2
χ分布。
现在2N =,所以假设1H 下,观测信号x 的概率密度函数为
22/21
12/22
1(|)exp()
2(2/2)2
1exp(),022
x p x H x x
x -=-Γ=-≥
当0x <时,1(|)0p x H =。
于是,似然比函数为
1/2210exp ,0
(|)()222(|)0,
0x x x p x H x p x H x πλ⎧⎛⎫
⎛⎫-≥⎪ ⎪ ⎪==⎨⎝⎭⎝⎭⎪
<⎩ 当似然比检测门限为η时,判决表达式为
1
1/22
0exp ,0
222,
0H H
x x x H x πη⎧⎛⎫>⎛⎫⎪-≥⎪ ⎪ ⎪<⎝⎭⎨⎝⎭⎪⎪<⎩成立 对0x ≥的情况,化简整理得判决表达式为
1
1/22
22ln H H
x x ηπ⎡⎤
>
⎛⎫-⎢⎥ ⎪<⎝⎭⎢⎥⎣⎦
四、(15分)已知被估计参量θ的后验概率密度函数为
2(|)()exp[()],0p x x x θλθλθθ=+-+≥
(1)求θ的最小均方误差估计量^
mse θ 。
(2)求θ 的最大后验估计量^
map θ 。
解 (1)参量θ的最小均方误差估计量^
mse θ是θ的条件均值,即
^
0220
221
(|)()[()]1()()2
,mse p x d x exp x d x x x x θθθθ
λθλθθ
λλλλ
∞
∞
+==+-+=++=
≥-+⎰⎰
^
0,mse x θλ=<-
(2)由最大后验方程
^ln (|)
|0map p x θθθθ
=∂=∂ 得
^2[ln()ln ()]1
()|0
map
x x x θθλθλθθ
λθ
=∂
++-+∂=-+=
解得
^
^
1
,0,
map map x x x θλλθλ
=
≥-+=<-
七、(15分)若对未知参量θ进行了六次测量,测量方程和结果如下:
182222202384404384n θ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥
=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦
设初始估计值和估计量的均方误差分别为:^
2
000,θε==∞ 试用递推估计求
θ的线性最小二乘估计量^^
1def s k θθ=和估计量的均方误差
^
12
2(1,2,
,6)s
def
k k θε
ε==;并将最终结果与非递推估计的结果进行比较。
解 我们知道,线性最小二乘估计量的构造公式为
^
1s θ=H H H x T -1T ()
而单参量θ的线性最小二乘递推估计的公式为
22121
12^^
^
11[()]()
k k k k k k
k k k k k k h K h K x h εεεθθθ-----=+==+-
这样,能够算出1,2,,6k =的非递推估计结果和递推估计结果,如下表所示。