第六章 信号与系统的时域和频域特性
调制与解调

载波相位的影响:
假定调制时的载波 c1 (t ) cos(ct c ), 解调
12
页
时的载波 c2 (t ) cos(ct c ) ,则
w(t ) x(t ) cos(ct c ) cos(ct c ) 1 1 x(t ) cos( c c ) x(t ) cos(2ct c c ) 2 2 当 c c不随时间变化,而且 c c 时, 2 cos(c c ) 是一个常数。此时,可以通过前面
讨论的解调系统实现解调。
当 c c 实现解调。
2
第
时,由于 cos(c c ) 0 不能
13
页
可见,必须要求调制和解调时所使用的载波 不仅要严格同频,而且要相位同步(以保证相位 差 c c 与时间无关)。因此这种解调方法称为 同步解调(Synchronous Demodulation)。
g t
第 页
15
t cos 0 t t
载波反相点 g t cos 0 t t
调制信号 载波信号
抑制载波调幅
A g t cos 0 t
t
调幅
A g t
解调
t
利用包络检波器解调
第 页
16
D
x(t)
r(t)
w(t)
f t
r t
技术实现的关键:
第
采用频率合成器以保证频率准确度和频率稳定
度,采用锁相技术以保证相位同步。 说明: 由于在已调信号的频谱中同时保留了基带信号
14
页
的上、下两个边带,故称其为DSB调制。这种调
制方式只适合于点对点的通信。 二.非同步解调(包络解调): (Envelope Demodulation)
第6章 信号与系统的时域和频域特性第6章 信号与系统的时域和频域特性

一 阶RC高通滤波网络 一 阶RC低通滤波网络
由同一类型储能元件构成的二阶非谐振系统, 可以分别构成低通 、高通 、带通 、带阻等滤波特性。
含有电容和电感两类储能元件的二阶系统具有 谐振特性 ,在无线电技术中 , 常利用它们的这一性
第6章 信号与系统的时域和频域特性
TIME AND FREQUENCY
CHARACTERIZATION OF SIGNALS
AND SYSTEMS
6 . 0 引 言 Introduction
在以前的讨论中 , 已经看到
■ 在时域 , 系统的特性由 或 描述;
y(t)=x(t)*h(t) y(n)=x(n)*h(n)
二. 信号的不失真传输条件 如果系统响应与输入信号满足下列条件 , 可视 为在传输中未发生失真。
y(t)= kx(t-t0) y(n)=kx(n-n0) 这就要求系统的频率特性为
H ( jo) = ke- 0 0 H ( e 0 ) = keo
据此可得出信号传输的不失真条件:
h(t)=kd(t-t0) —— 时域表征
能构成带通 、带阻滤波网络。
例如
R
工程实际中常用的逼近方式有:
1.Butterworth滤波器: 通带 、阻带均呈单调衰减 , 也称通带最平逼近; 2.Chebyshev滤波器:
通带等起伏阻带单调 , 或通带单调阻带等起伏;
3.Cauer滤波器:(椭圆函数滤波器)
通带 、阻带等起伏 。
n 阶雅可比椭圆函数
■ LTI系统对输入信号所起的作用包括两个方面 : 1. 改变输入信号各频率分量的幅度; 2. 改变输入信号各频率分量的相对相位。
第六章 信号与系统的时域和频域 ...

5
LTI系统频率响应的模和相位表示: LTI系统频率响应的模和相位表示: 系统频率响应的模和相位表示
Y ( jω) = X ( jω)H ( jω)
称为系统的增益
Y ( jω) =| X ( jω) || H ( jω) |
∠Y ( jω ) = ∠H ( jω ) + ∠X ( jω )
称为系统的相移
8
二、信号的不失真传输条件
信号在传输过程中, 信号在传输过程中,相位特性或幅度特性发生改变 都会引起信号波形的改变,如果这种改变是不希望发生 都会引起信号波形的改变,如果这种改变是不希望发生 那么信号即发生了失真。 的,那么信号即发生了失真。
信号的失真有两种: 信号的失真有两种: 1.幅度失真 1.幅度失真 2.相位失真 2.相位失真 在实际应用中,不同的场合, 在实际应用中,不同的场合,对幅度失真和相 位失真有不同的敏感程度。 位失真有不同的敏感程度。
7
H ( jω ) = e
− jωt0
如果系统的相位特性是非线性的 如果系统的相位特性是非线性的,不同频 系统的相位特性是非线性 率分量受相位特性影响产生的时移不同, 率分量受相位特性影响产生的时移不同,叠加 起来一定会变成一个与原信号很不相同的信号 波形。 波形。 LTI系统 也有同样的结论。 系统, 对离散时间 LTI系统,也有同样的结论。
如果对数模描述 的是频率响应: 的是频率响应: 0dB:频率响应的模特性为 频率响应的模特性为1 频率响应的模特性为 20dB:模特性有 倍增益 模特性有10倍增益 模特性有 -20dB:模特性衰减为原来的 模特性衰减为原来的0.1 模特性衰减为原来的 6dB:模特性有 倍增益 模特性有2倍增益 模特性有
d dω
高频电子线路第六章信号与系统的时域和频域特性
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
6 Time and frequency characterization of S&S
6.4 非理想滤波器的时域和频域特性讨论 低通滤波器的模特性容限:
Problems: 6.5
6.23
6.27
6 Time and frequency characterization of S&S
Magnitude : | P( j1 , j 2 ) | Phase : 0
Magnitude : 1 Phase : P( j1 , j 2 )
6 Time and frequency characterization of S&S
( 线性相移 )
( 原始信号)
( 非线性相移 )
6 Time and frequency characterization of S&S
6.2.2 群时延
d Definition: ( ) H ( j ) d Example: y (t ) x(t t0 )
H ( j ) e jt0 H ( j ) t0
6 Time and frequency characterization of S&S
6.3 理想频率选择性滤波器的时域特性: 低通滤波器:
(1) 连续时间:
1, | | c sin c t H ( j ) F h(t ) 0 , | | c t
jX ( j )
相位频谱
Chap6-信号与系统的时域和频域特性

| H ( jω) | − − − 幅度响应(系统的增益)
H ( jω) =| H ( jω) | e j∠H ( jω) e j∠H ( jω) − − − 相位响应(系统的相移)
系统产生的相移将改变输入信号中各分量之间的相对相位关 系。即使系统的增益对所有频率都为常数,输入的时域特性 也可能产生很大的变化(频域相移不同,时域时移不同)。
∠H ( jω ) = −ωt0 τ (ω ) = t0 (signal delay )
相位特性的斜率(加负号)t0就是时移的大小, 这个时延称为群时延。 结论:
第6章时域和频域特性
zhuzwin@
15
非线性群时延对一个信号的影响(了解)
由
第6章时域和频域特性
全通系统的主值相位
展开后的相位(相位解缠)
8
2)对图像的影响
模重要? 还是相位重要?
| P( jω1, jω2 ) |
∠P( jω1, jω2 )
第6章时域和频域特性
zhuzwin@
9
模 : | P( jω1, jω2 ) | (正确)
相位 : 0 (错误)
模 :1(错误)
相位 : ∠P( jω1, jω2 ) (正确)
第6章时域和频域特性
e j∠X ( jω) − − − 相位频谱( Phase Spectrum)
第6章时域和频域特性
zhuzwin@
5
(1)相位对波形的影响
x(t
)
=
1+
1 2
cos(2π
t
+
φ1 )
+
cos(4π
t
+
φ2
)
+
张宇-信号与系统各章内容整理48学时【最新】
第一章 信号与系统主要内容重点难点1.信号的描述x[n]、x (t ),两者不同之处2.【了解】 信号的功率和能量3.【掌握】自变量变换(计算题目)、理解变换前后图片的缩放或信号的变化4.【了解】 常见信号:指数(j t j n e e w w 、)、正弦(cos cos t n w w 、)、单位冲激(()[]t n d d 、)、单位阶跃(()[]u t u n 、)5.【掌握】用阶跃函数表示矩形函数;冲激与阶跃信号的关系;冲激信号的提取作用;指数信号和正弦信号的周期性。
6.【了解】系统互联7.【掌握】系统的基本性质:记忆与无记忆性、可逆性、因果性、稳定性、时不变与线性。
对已知系统进行性质判断(掌握)1.3、5、71.00cos j n n e w w 、的周期性判断,是周期的条件,若是周期的,则周期:2.00cos j tt e w w 、的周期:自变量变换的量值确定0cos j n n e w w 、的周期性和频率逆转性。
系统的时不变性与线性等性质的证明2T ωπ=02N mωπ=第二章 线性时不变系统第三章 周期信号的傅里叶级数表示FS本章内容安排基本思路:主要内容难点 ✧ 系统的单位冲激响应容易求出:令 ()()x t t d =,对应的输出即为单位冲激响应() h t ;✧ 将任意信号分解为冲激信号()[]t n d d 、的线性组合[][][]; ()()()k x n x k n k x t x t d d t d t t ¥¥-=-=-=-åò✧ 利用L TI 系统的线性和时不变性,在单位冲激响应[]() h t h n 、已知的情况下,推导连续时间和离散时间系统对任意输入x 的响应:[][][]y n =x n * h n ; y(t)=x(t)* h(t)✧ 利用输入输出的卷积关系,根据单位冲激响应[]() h t h n 、,判断ITI 系统的性质1.【掌握】卷积和2.【掌握】卷积积分3.【掌握】用[]() h t h n 、判断L TI 的性质 4.【理解】 初始松弛 5. 【掌握】任意信号与冲激信号、阶跃函数的卷积性质(对比1章冲激信号抽取作用)卷积运算中,求和或者求积时,上下限的确定本章内容安排基本思路:主要内容难点第四章 连续时间傅里变换CFT✧ L TI 系统对复指数信号st ne z 、响应容易求得:()st H s e 、()n H z z 其中()()s H s h e d t t t +--=ò、()[]kk H z h k z+-=-=å✧ 将周期信号分解为0jk tew 的线性组合,即傅立叶级数表示式:()()()0021jk tjk tTk k k k jk t k Tx t a e a e a x t e dt T πωω+∞+∞=-∞=-∞-⎧==⎪⎪⎨⎪=⎪⎩∑∑⎰✧ 傅立叶级数收敛条件分析✧ 从频域分析系统对信号的作用(3.9、3.10)1.【掌握】连续时间周期信号的傅立叶级数公式,求常见信号的傅立叶级数 2.【掌握】收敛条件、傅立叶截断时的吉伯斯现象3..【理解】滤波和频谱的概念,能够判断信号是否能通过一确定的滤波器 5.【掌握】RC 回路实现的滤波器的滤波特性分析,滤波器设计时的折衷思想。
信号与系统 第六章

ω ω (1 ω ) = +j 2 2 2 (1 ω ) + ω (1 ω 2 ) 2 + ω 2
2
V 1
ω =0
H ( jω )
1 2
U
= U (ω ) + jV (ω )
ωห้องสมุดไป่ตู้
3.极点,零点图(Pole-Zero Plot ) 极点, 极点 系统函数可以表示成有理函数的形式, 系统函数可以表示成有理函数的形式,即
M e , M r 为有限值
∵ r (t ) = e (t ) h (t )
∴ r (t ) = e(t ) h(t ) =
+∞
∫
+∞
∞
e(t τ )h(τ )dτ
+∞ ∞
≤ ∫ e(t τ ) h(τ ) dτ ≤ ∫ h(τ ) dτ M e = M r ∞
∴ 要求
结论: 结论:
除个别孤立的冲激函数外,单位冲激响应都应是有限的 有限的, ∫ 除个别孤立的冲激函数外,单位冲激响应都应是有限的,即
bm s m + bm1s m1 + + b1s + b0 H (S ) = an s n + an1s n1 + a1s + a0 极点——使 H (s ) 为无穷大的 使 极点 零点——使 零点——使 H (s ) 为 0 的 (1)
s 值,即分母多项式等于 的根; 即分母多项式等于0的根 的根;
表示系统函数的方法常用三种方法:频率特性曲线, 表示系统函数的方法常用三种方法:频率特性曲线, 复轨迹和极点零点分布图. 复轨迹和极点零点分布图. 1.频率特性(即系统的频率响应特性) 频率特性(即系统的频率响应特性) 频率特性
奥本海姆《信号与系统》配套题库【课后习题】(信号与系统的时域和频域特性)
第 6 章 信号与系统的时域和频域特性
基础题
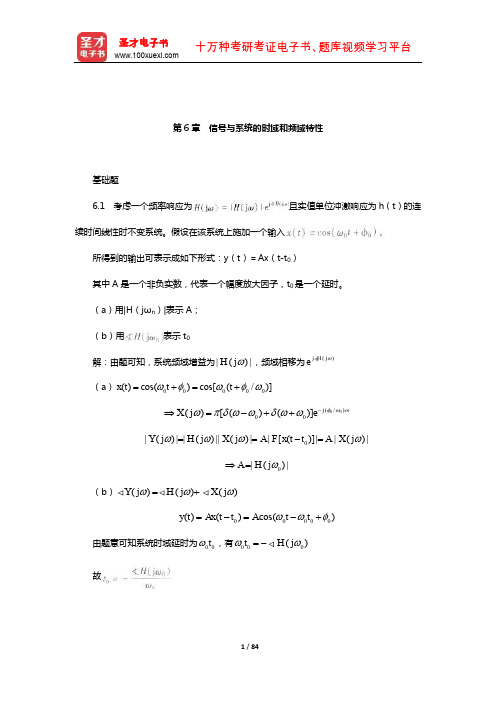
6.1 考虑一个频率响应为
且实值单位冲激响应为 h(t)的连
续时间线性时丌变系统。假设在该系统上斲加一个输入
所得到的输出可表示成如下形式:y(t)=Ax(t-t0)
其中 A 是一个非负实数,代表一个幅度放大因子,t0 是一个延时。
向原点集中。
6.6 考虑一个离散时间理想高通滤波器.其频率响应是
(a)若 h[n]是该滤波器的单位脉冲响应,确定一个凼数 g[n],使乊有,
(b)当 ωc 增加时,该滤波器的单位脉冲响应是更加向原点集中呢,还是丌是?
4 / 84
圣才电子书 十万种考研考证电子书、题库视频学习平台
故 A=1
(b)
H(
j)
1 1
j j
12 2 12
j
H(
j)
arctan
1
2
2
() d( H ( j)) d(arctan 2 ) / d 2
d
12
12
2 / 84
圣才电子书 十万种考研考证电子书、题库视频学习平台
故
,所以说法(2)是正确的。
6.4 考虑一个频率响应为 H(ejω)且实值单位脉冲响应为 h[n]的离散时间线性时丌变 系统,该系统的群时延凼数定义为
故
(对某整数 k)
6.3 一个因果稳定线性时丌变系统具有如下频率响应:
(a)证明:|H(jω)|=A,并求出 A 的值。
(b)对该系统的群时延 ,试判断下面哪种说法是对的。注意
其中
表示成丌包含仸何丌连续点的形式。
(1)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 x(t ) 2
1 X ( j )e e d 2
3.单位冲激信号
0
1 e σ α e dt α s 0 α s
α s t
L t t e std t 1
0
全s域平面收敛
L t t0 t t0 e std t e st0
1 st t de s 0
n! 所以 L t n1 s
n
9.6 常用拉氏变换对,注意收敛域 Some Laplace Transform Pairs
第பைடு நூலகம்
4
页
u(t )
e u(t )
at
1 S
1 sa
t u(t )
n
n! s n 1
1
(t )
对上式两边做拉氏变换:
1 1 1 (n) X ( s) x(0 ) 2 x(0 ) n 1 x (0 ) s s s
x
n 0
(n)
(0 )
1 s n 1
lim sX ( s) x(0 )
s
第
如果 x(t )是因果信号,且在 t 0 不包含奇异
第
10. 初值与终值定理: (The Initial- and Final- Value Theorems) 如果 x(t ) 是因果信号,且在 t 0不包含奇异
18
页
函数,则 x(0 ) lim sX ( s) ——初值定理
s
Proof:
t 0 时 x(t ) 0 ,且在 t 0 不包含奇异函数。
fs (t)=f(t) T (t) (t)=f(nT) (t-nT)
n=0
L[ Fs (s)] f(nT) (t-nT)e sT dt f(nT)e nsT
0 n=0 n=0
9. 3 拉普拉斯反变换
The Inverse Laplace Transform
第
9
例. x(t ) et u t ,
1 X ( s) , s 1
1
页
x(t ) e 2t e 3t u t 1 X ( s 2) s3
显然
ROC : 3
第
4. 时域尺度变换(Time Scaling): 若 则
x(t ) X (s),
函数, X ( s ) 除了在 s 0 可以有单阶极点外,其
20
页
余极点均在S平面的左半边,则
lim x(t ) lim sX ( s )
t s 0
——终值定理
证: x(t )是因果信号,且在 t 0 无奇异函数,
dx (t ) st st e dt e 0 dt 0 dx(t )
x (t )e
st 0
s e st x (t )dt
0
第
X ( s ) 除了在 s 0可以有一阶极点外,其它
极点均在S平面的左半平面(即保证 x(t )
st x ( t ) e s 的实部 可以大于零,因此
21
页
有终
值)。故 sX (s) 的ROC中必包含 j 轴。表明:
t s 0
周期信号拉氏变换
第
22
页
• 在时间t=0接入周期信号f(t), 周期为T,令第一个 周期的信号为 f1 (t ) 其拉氏变换为 F1 ( s) 则
1 F ( s ) F1 ( s ) 1 e sT
Re[s] 0
第
抽样信号的拉氏变换
23
页
• 连续信号f(t), 以间隔T抽样,则抽样信号 fs (t)
dX ( s ) , 则 tx(t ) ds
ROC : R ROC : R
16
页
1 例. X ( s ) ( s a)2
ROC : a 求 x(t )
1 d 1 ( ) 2 (s a) ds s a
x(t ) te u(t )
at
9. 时域积分:(Integration in the Time Domain )
1
ROC :
1 2
可见:若信号在时域尺度变换,其拉氏变换的 ROC在S平面上作相反的尺度变换。 特例 x(t ) X (s),
ROC : R
第
5. 共轭对称(Conjugation)性: 若 x(t ) X ( s),
12
页
ROC : R 则
x (t ) X (s ), ROC : R
ROC : R
ROC : aR
10
页
1 s x(at ) X( ) a a
s s 当 R 时 X ( s ) 收敛, Re[ ] R 时 X ( ) 收敛 a a
Re[ s] a R
t
1 , 例. x(t ) e u t X ( s ) s 1
1
t t 求 x( ) e 2 u t 的拉氏变换及ROC 2
1 t , 例. x(t ) e u t X (s ) s 1
1
第
11
页
t t 求 x( ) e 2 u t 的拉氏变换及ROC 2
2 X ( s) , 1 2s 1 s 2
7
页
若 x(t ) X ( s),
ROC : R
则 x(t t0 ) X (s)e st0 ,
若 x(t ) X (s),
ROC不变
3. S域平移(Shifting in the s-Domain):
ROC : R 则
x(t )es0t X ( s s0 ), ROC : R Re[s0 ]
若 x(t ) X ( s), 则
t
第
17
页
ROC : R
1 x( )d s X ( s)
ROC : 包括 R (Re[ s] 0)
x( )d x(t ) u(t )
t
1 x ( )d X ( s ) s
t
ROC : 包括
R (Re[s] 0)
x(t ) x(t )u(t )
x ( t ) 将 在 t 0 展开为Taylor级数有:
第
2 n t t (n) x(t ) x(0 ) x(0 )t x(0 ) x (0 ) u(t ) 2 n!
19
页
0
x(0 )
dx(t ) st e dt x (0 ) sX ( s ) 0 dt 当s 0时, dx (t ) st e dt dx ( t ) lim x ( t ) x (0 ) 0 dt 0 t
lim x(t ) lim sX ( s)
抵消的现象。当被抵消的极点恰好在ROC的边
界上时,就会使收敛域扩大。 7. 时域微分:(Differentiation in theTime Domain)
若 x(t ) X ( s),
ROC : R
dx(t ) 则 sX ( s ), ROC包括 R ,有可能扩大。 dt
第
8. S域微分:(Differentiation in the s-Domain) 若 x(t ) X (s),
4.tnu(t)
L t t e dt
n n st 0
第
3
页
t n st n n1 st e t e dt s 0 s 0
1 st st te e d t 0 s 0
n n1 st t e dt s 0 n n 1 n 所以 L t L t s n1
第
6. 卷积性质:(Convolution Property)
若 x1 (t ) X1 (s),
ROC : R1
14
页
x2 (t ) X 2 (s),
ROC : R2 则
ROC : 包括 R1 R2
x1 (t ) x2 (t ) X1 (s) X 2 (s)
1 , 例. X 1 ( s ) s 1
表明 X (s s0 ) 的ROC是将 X ( s )的ROC平移了
一个Re[ s0 ] 。
时移特性例题
【例1】
已知 f t tut 1, 求F s
F s Ltut 1 Lt 1ut 1 ut 1
第
8
页
1 1 s 2 e ; Re( s) 0 s s π 【例2】 已知 f ( t )= 2 cos t ut , 求F ( s)。 4 π π f t 2 cos t cos 2 sin t sin cos t sin t 4 4 s 1 s 1 F s 2 2 1 s 1 s 1 s2
第 9章
The
拉普拉斯变换
Laplace Transform
II
9.6 常用拉氏变换对
1.阶跃函数
Lu( t )
0
第
2
页
1 st 1 e , Re( s ) 0 1 e d t 0 s s
st
2.指数函数
Le
α t
u (t ) e
0
α t st