电动葫芦门式起重机动力学结构优化设计
门式起重机结构优化设计
门式起重机结构优化设计发表时间:2018-10-25T16:51:42.843Z 来源:《防护工程》2018年第15期作者:叶恭宇[导读] 在工作过程中能够承受和传递各种载荷,其整体性能决定着起重机的使用寿命。
为了提高起重机的设计质量,对结构形式进行一定的优化设计,在确保其整体性能符合要求的前提下,尽可能减轻重量,节省材料,提高企业的经济效益。
叶恭宇浙江省特种设备检验研究院浙江省杭州市 310020摘要:门式起重机是一种常用的物料搬运机械,广泛应用于工业生产中,具有货场利用率高、运行成本低以及装卸效率高等优点。
金属结构是门式起重机的骨架,在工作过程中能够承受和传递各种载荷,其整体性能决定着起重机的使用寿命。
为了提高起重机的设计质量,对结构形式进行一定的优化设计,在确保其整体性能符合要求的前提下,尽可能减轻重量,节省材料,提高企业的经济效益。
关键词:门式起重机;结构设计;设计要点 1结构优化的基本概念1.1 设计变量每项设计方案需要通过一组基本的参数表示,这些基本参数主要包括:构件长度、截面尺寸、某些位置的坐标值、重量、惯性矩、应力、变形、固有频率以及效率等。
在对某个结构进行优化设计过程中,工艺和结构布置等方面的参数可以根据设计经验进行取值,其他参数可以在优化过程中进行调整,这些一直处于变化状态中的参数,被称为设计变量。
设计变量主要有连续和离散两种不同的类型,在机械优化设计中涉及到的变量大多数都是连续变量,可以通过常规的优化方法进行求解。
1.2 目标函数判定不同机械设计方案的优劣主要通过对设计指标进行系统全面的分析,设计指标通过一定的转化能够转变为相应的设计变量函数,该函数即为目标函数。
不同的优化方案具有不同的目标函数,目标函数的范围非常广泛,可以是重量、体积,可以是功耗、产量等。
建立目标函数是优化设计中的关键过程,目标函数根据目标数量的不同可以分为单目标函数和多目标函数,其中单目标函数是指在优化设计过程中,只对某一问题进行优化;多目标函数是指在优化设计过程中,同时对多个目标进行优化。
门式起重机结构优化设计
优化前
范围
mm 2000. 0 1200. 0 1000. 0 700. 0 1200. 0 800. 0 2000. 0
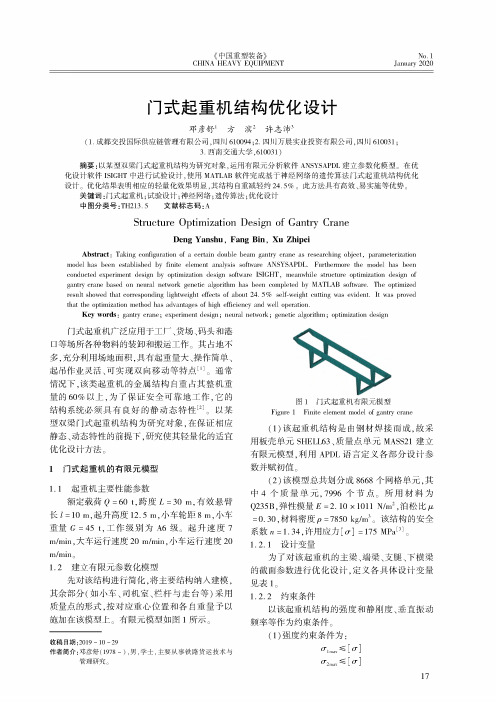
Figure 1 Finite element model of gantry crane
(1) 该起重机结构是由钢材焊接而成,故采 用板壳单元SHELL63、质量点单元MASS21建立 有限元模型,利用APDL语言定义各部分设计参 数并赋初值。
(2) 该模型总共划分成8668个网格单元,其 中4个质量单元,7996个节点。所用材料为 Q235B,弹性模量 E=2. 10 x 1011 N/n?,泊松比“ = 0.30,材料密度p=7850 kg/m3。该结构的安全 系数n = 1.34,许用应力[b] =175 MPa⑶。 1.2.1设计变量
为了对该起重机的主梁、端梁、支腿、下横梁 的截面参数进行优化设计,定义各具体设计变量 见表1。 1.2.2约束条件
以该起重机结构的强度和静刚度、垂直振动 频率等作为约束条件。
(1)强度约束条件为:
bT”[b] 叽SB]
17
No! January 2020
《中国重型装备》 CHINAHEAVYEQUIPMENT
that the optimization method has advantaaes of high efficiency and well operation.
Key words: gantry crane ; experirnent design ; neural network ; genetic algoVthm ; optimization design
门式起重机广泛应用于工厂、货场、码头和港 口等场所各种物料的装卸和搬运工作。其占地不 多,充分利用场地面积,具有起重量大、操作简单、 起吊作业灵活、可实现双向移动等特点⑴。通常 情况下,该类起重机的金属结构自重占其整机重 量的60%以上,为了保证安全可靠地工作,它的 结构系统必须具有良好的静动态特性⑵。以某 型双梁门式起重机结构为研究对象,在保证相应 静态、动态特性的前提下,研究使其轻量化的适宜 优化设计方法。
电动式手拉葫芦的液压系统原理与优化设计
电动式手拉葫芦的液压系统原理与优化设计一、引言电动式手拉葫芦作为一种常见的起重设备,具有体积小、重量轻、操作简单的优点,广泛应用于工业生产和仓储领域。
其中,液压系统是电动式手拉葫芦的核心部分,起到传输能量、控制起升速度和起升高度的关键作用。
本文将深入探讨电动式手拉葫芦液压系统的原理与优化设计。
二、液压系统原理1. 液压系统组成电动式手拉葫芦的液压系统由以下主要组成部分构成:(1)液压站:包括电机、泵、油箱和相关的控制元件等。
(2)液压缸:将液压能转化为机械能,实现手拉葫芦的起升和下降。
(3)控制阀:负责控制液压系统的工作流程,如流量控制阀、压力控制阀等。
(4)液压油:作为传递能量和润滑剂的介质,具有压力稳定、温度适应性好等特点。
2. 液压系统工作原理电动式手拉葫芦的液压系统工作原理如下:(1)电机驱动泵:电机通过传动装置驱动泵的旋转运动,泵将液压油从油箱吸入,并通过压力能将液压油送入液压系统。
(2)液压油进入液压缸:经过一系列的控制阀的调节,液压油进入液压缸,使活塞在液压力的作用下进行往复运动。
(3)液压油回流油箱:在液压缸活塞所需的工作过程中,经过控制阀调节,液压油经过回流阀回流至油箱。
(4)液压系统控制:通过控制阀的调节,控制液压系统的工作流程,实现手拉葫芦的起升和下降。
三、优化设计液压系统的优化设计可以提高电动式手拉葫芦的性能和工作效率,具体优化方法如下:1. 选用适当的液压油液压油是液压系统的传动介质,直接影响到手拉葫芦的工作效能和使用寿命。
因此,在优化设计液压系统时,需要选用适当的液压油。
液压油应具有良好的润滑性能、抗磨性能和稳定的黏度特性,以保证系统的顺畅运转和长期稳定的工作。
2. 优化泵的选型和配合泵是液压系统的核心,影响着系统的工作效率和起升能力。
在优化设计中,应根据起升负载、起升高度等因素,合理选择泵的型号和流量,保证其能够满足系统的工作需求。
此外,还应注意泵与电机的配合,确保其能够有效地输出液压能量。
探究龙门起重机结构动态优化设计

探究龙门起重机结构动态优化设计针对龙门起重机应用中存在的问题,比如结构振动剧烈问题、吊载运行稳定性差问题,进行动态分析,探索龙门起重机作业过程中出现运行问题的原因,并且针对不同类型的起重机提出了相应的优化改进方案。
对龙门起重机结构动态设计进行优化,以满足整机重量最小需求,以及满足模态固有频率条件等,作为优化目标,对其结构参数进行优化设计。
标签:龙门起重机;结构参数;结构动态;优化设计起重机属于大型运输机械,能够在复杂情况作业。
其龙门起重机自身的结构特性以及动态特性等,对龙门起重机的使用性能,有着较大的影响。
传统的起重机结构设计,主要依靠人工设计,结合传统经验等方法,具有较大的局限性。
随着起重机设计技术的发展,使得动态工作情况被人们重视与思考,并且对龙门起重机结构进行动态优化设计。
1 龙门起重机结构概述龙门起重机结构较为简单,例如图1,其为JQ50型号的龙门起重机结构示意图。
主要包括下横梁与端梁、柔性支腿与刚性支腿、主梁与门框等。
现代龙门起重机,多采取静态设计+动态补偿设计的方法,除了考虑静态时的工作载荷外,还考虑动态载荷,采取添加安全系数的方式进行补偿,以此简化结构动态设计,以此确保龙门起重机结构设计,能够满足静强度与静刚度的需求,但是因为缺乏动态特性分析,难以估计龙门起重机动态作业时的稳定性,进而极易引发作业问题,包括整机结构振动强烈以及运行不稳定等问题。
龙门起重机的稳定性与刚度,与其金属结构的承受能力,有着直接的关系,进而使得动应力与动刚度等问题更加严重。
当弯曲动刚度超出标准,则极易造成整机结构振动问题,而动应力超出标准,极易造成结构变形或者损伤问题。
当跨中动移位超标时,则会造成整机结构失稳。
2 龙门起重机结构动态分析2.1 基于Ansys动态分析理论基础龙门起重机作业时的动态问题,其属于有限个自由度弹性系统运动范畴。
龙门起重机的模态分析,主要目的是明确龙门起重机结构的振动特性,包括固有频率与振形,该数据信息可以在龙门起重机结构无阻尼自由振动条件下获取。
电动葫芦门式起重机动力学结构优化设计讲解
PH= Ψ5ma
(1)
式中:a为启动、制动加速度; Ψ5为系数,通常取值1≤ Ψ5≤2, 本文取值为1.5。
1.2.4 附加载荷
门式起重机主要是露天作业,考虑到起重机在露天 环境下可能会受到风作用等,所以,还将考虑一定作 用的风载荷,本文将风载荷分为工作状态风载荷和非 工作状态风载荷两种。
1.2.5 约束条件
为正确地反应起重机的工作性能,本次建
模决定采用shell63和soild45两种单元, shell63是一种平面单元,该单元每个节点 有6个自由度,既有弯曲能力,又有膜力, 可承受平面载荷和法向载荷。Soild45是一 种实体单元,每个单元由8个节点组成,每 个节点有xyz三个方向自由度,能够承受塑 性,大变形和大应变的特征。起重机的主 梁和支架部分采用的是shell63单元,起重 机地梁决定采用soild45单元。对有限元模 型进行网格划分,已划分为16 562个单元 16635个节点。构建的起重机有限元模型如 图2所示。
平位移。
3.2.3 动位移约束条件
限制龙门起重机动位移的最大值与起重机静 位移的最大值相同,故应提取瞬态动力学分 析.厅中跨中节点的最大位移δd 进行约束,即:
δd≤L/800பைடு நூலகம்
(8)
3.2.4 动刚度约束条件
根据《起重机设计手册》,电动葫芦门位于
起重机跨中位置时,起重机的上下自震频率 fs立 该大于2Hz,但是起重机的模态频率应该在满足 要求的情况下越小越好。
约束条件、静刚度约束条件、动位移约束条件、
动刚度约束条件和约束条件上下式。
3.2.1 静强度约束条件 静强度约束条件是指静强度的设计准则为结构中产生的
最大应力不大于结构材料的许用应力[σ],故提取电动葫芦位 于中间位置处的最大应力σLmax 和左右悬臂梁处的最大应力 σlmax ,分别给予约束:
门式起重机大车运行机构分析及优化
门式起重机大车运行机构分析及优化摘要:门式起重机应用广泛,其大车运行机构形式多种多样。
由于门式起重机使用工况的不同,大车运行机构在使用中往往出现一些故障,导致起重机不能正常使用,严重影响生产。
随着经济的飞速发展,新兴行业不断涌现,对门机的需求量越来越大,但是行业内部斗争日趋白热化,对大车的使用要求越来越高,作为可持续发展的企业,设计师应在保证大车运行性能的前提下严格控制成本,这样才能增加企业的市场竞争力。
关键词:启动、制动、打滑、防风装置一.大车运行机构的典型结构(1)底座式立式减速器结构的减速器的输入轴与电动机高速轴采用全齿联轴器连接,输出轴与车轮轴同样采用全齿联轴器连接,减速器固定在与下横梁(台车架)焊为一体的底座上,结构简单,受力明确,安装、检修易于调整。
由于输入轴和输出轴采用全齿联轴器,使机构具有良好的补偿性能,缓减了运行机构起、制动时的冲击,保证了运行机构的使用寿命,该结构适用于各种吨位、跨度、工作级别的门机大车运行机构。
不足之处是下横梁(台车)单侧宽度较大,需留足够的安全距离。
(2)套装式立式减速器结构减速器直接套装在车轮轴上,采用销轴联接固定在与下横梁(台车架)焊为一体的销轴座上。
减速器的输入轴与电动机高速轴采用全齿联轴器连接,省去了低速轴联轴器,机构更加紧凑,且便于安装。
然而,该结构在实际使用中故障率比较高,主要有:销轴座焊缝或母材经常被拉裂;套装减速器轴套易损坏。
究其原因主要为设计阶段对大车运行机构的工况估计不足导致设计选型失误。
销轴座一般为调整好后焊在下横梁(台车)上,有较大的焊接应力,且承受由减速器传来的扭矩,在运行机构频繁地起动或制动及正、反向运动的作用下,加速了销轴座疲劳破坏;由此可见,该结构宜使用在大车运行机构使用不太频繁,工作级别为M3、M4的机构上,工作级别在M5以上的机构应慎用。
(3)底座式卧式减速器结构电动机与卧式减速器的高速轴通过全齿联轴器联接,经过减速器的末级开式齿轮传动减速后,带动固定在车轮上的开式传动齿轮,从而使运行机构车轮转动,车轮轴不传递扭矩。
门式起重机的优化设计
门式起重机的优化设计摘要:随着现代工业的发展,人们对于起重机械的可靠性提出了更高的要求,因此在产品设计中,要通过完善的设计提高起重机械的可靠性。
通过提升起重机械的可靠性有助于提升起重机械工作过程中的安全性。
关键词:起重机设计;可靠性分析;起重机械设计的可靠性会影响其使用效果,所谓保证起重机械的可靠性就是保证其在规定时间内及使用条件下,其使用功能不能发生改变。
起重机械在设计制造过程中会受到诸多因素的影响,例如材料的特性,制造过程中的测量和加工,零部件的组装,这些因素都是设计中需要考虑的问题,因此起重机的各类参数存在制约因素,特别是门式起重机,由于结构件较多,增加了不确定性。
所以在设计中要将影响可靠性的不确定因素加以识别并优化,从而提升起重机的整体可靠性。
1.起重机设计内在特点分析1.1 可靠性涉及到的领域多由于门式起重机应用于多个领域,因此产品的可靠性会影响到不同的领域,可靠性会体现出不同的作用。
在起重机设计中,要结合不同领域不同起重机的结构特点和运行原理上的差异,采取有针对性地设计,实现起重机的使用功能。
起重机设计要结合不同产品的使用特性采取不同的设计方法,保证起重机的可靠性符合相关的要求。
1.2 起重机械使用环境的复杂性由于不同的行业存在较大差异,因此起重机械的使用环境存在很大的差异。
门式起重机的工作环境,有些是在室外,避免不了日晒雨淋;有些在高温环境中,比如锻压车间;有一些则是在潮湿伴随腐蚀性的车间,比如电镀车间。
在一些恶劣的使用环境中,起重机的使用寿命是要大打折扣的,比如金属结构的锈蚀,可以使起重机的强度在短时间内急速减弱,大大影响其安全性。
又比如个别露天料场,由于吊装货物重量高体积大,不可避免会对起重机本体造成碰撞,一旦出现局部变形,便会出现应力集中等问题,影响其使用寿命。
起重机的可靠性设计要结合其在其使用环境中的性能,设计时要分析产品的使用环境情况,做到防患于未然。
1.3 起重机械的可靠性受外部因素的影响起重机的可靠性受两方面因素的影响,一方面是起重机设计时的可靠性,另一方面是起重机使用环境的影响。
门式起重机主梁优化设计论文
门式起重机主梁优化设计论文1外点法外点法求解约束优化问题:对于不等式约束:gu(X)≤0,u=1,2,…,m。
(1)取复合函数(惩罚项)为G[gu(X)]=mu=1{max[gu(X),0]}2。
(2)其中,max[gu(X),0]表示将约束函数gu(X)的值和零比较,取其中较大的一个。
对于等式约束hv(X)=0,v=1,2,…,p。
(3)取复合函数(惩罚项)为H[hv(X)]=pv=1[hv(X)]2。
(4)对于一般的约束优化问题,外点罚函数的形式为:准(X,rk)=(fX)+rkmu=1{max[gu(X),0]}2+rkpv=1[hv(X)]2。
(5)式中,rk为惩罚因子,rk>0。
惩罚项与惩罚函数随惩罚因子的变化而变化,当惩罚因子按一个递增的正数序列0<r0<r1<…<rk<rk+1<…变化时,依次求解各个rk所对应的惩罚函数的极小化函数,得到的极小点序列X(0),X (1),…,X(k),X(k+1),…将逐步逼近于约束函数的最优解,而且一般情况下该极小序列是由可行域外向可行域边界逼近。
综上所述,外点法是通过对非可行点上的函数值加以惩罚,促使迭代点向可行域和最优点逼近的算法。
因此初始点可以是可行域的内点,也可以是可行域的外点,这种方法既可以处理不等式的约束,又可以处理等式的约束,可见外点法是一种适应性较好的惩罚函数法。
外点法的计算步骤:1)给定初始点X(0)、收敛精度ε、初始罚因子r0和惩罚因子递增系数c,置k=0;2)构造惩罚函数准(X,rk)=f(X)+rkmu=1{max[gu (X),0]}2+rkpv=1[hv(X)]2;3)求解无约束优化问题min准(X,rk),得X*,令X(k+1)=X*;4)收敛判断。
若满足条件‖X(k+1)-X(k)‖≤ε,(6)和(fX(k+1))-(fX)(k)(fX(k))≤ε。
(7)则令X*=X(k+1),(fX*)=(fX(k+1)),结束计算;否则,令rk+1=crk,k=k+1,转至步骤2)继续迭代。
毕业设计(论文)-电动葫芦的改进设计
郑州大学毕业设计计算说明书(论文) 题目:电动葫芦的改进设计院系机械工程学院专业机械设计制造及自动化年级04级2班学生姓名指导教师2008年6月6日摘要作为一种轻小型起重设备,钢丝绳电动葫芦已经在工厂,仓库,港口,车站等多个领域和部门中得到了广泛的应用。
它是集电动机,减速器和钢丝绳卷筒(或环链)为一体的小型起重设备,配合单梁桥式或门式起重机,组成一个完整的起重机械。
然而,在我国电动葫芦的发展却不容乐观。
国内电动葫芦不仅减速器结构单一,而且产品的体积和质量比较大,性能不高。
和国外同类产品相比,存在很大的差距。
为此,我们进行了针对电动葫芦结构的改进设计。
本设计首先分析了国内外电动葫芦的发展状况,比较其差别,从而最终确定了对传统圆柱齿轮减速器的改进。
为了使改进的电动葫芦达到体积小,质量轻的目的,通过综合比较分析各种传动装置,最终选定了渐开线行星齿轮少齿差型传动装置,并且选定钢丝绳,计算和校核卷筒,选择和校核电动机,从而达到了减小电动葫芦体积和质量的目的。
关键词:电动葫芦行星齿轮减速器渐开线少齿差行星齿轮传动N型ABSTRCATAs one kind of light small lifting equipment, the steel wire electric hoist is widely used in factories, warehouses, ports, railway stations and other fields and departments.It is the collection electric motor, and wire rope reel machine slowdown (or link chain) for the integration of small hoisting equipment, most also carry trolleys walk with bridge or doors Cranes form a complete lifting appliances. However the development of the electric hoist in our country is not optimistic. In our country, there is not only single kind of the decelerator’s structure of the electric hoist, moreover the product volume and the quality quite are big, the performance is poor. Compared to similar foreign products, there is a big gap. To this end, we carried out a structure of the electric hoist improved design.This design has first analyzed the domestic and foreign electric hoist's development condition, compared with its difference, thus finally has determined to the tradition cylindrical gears reduction gear improvement. In order to improve electric hoist to the small size, light weight of purpose through comprehensive comparative analysis of various transmission device, ultimately selected N planetary gear-type transmission device, and selected rope, calculated and checked drum, Selected and examined electric motor, thus had achieved reduces the electric hoist volume and the quality goal. Finally, I carried on the assembly simulation through three-dimensional software to the reduction gear, in order to discover some insufficiency, so as to be improved.Key words: Electric hoist Decelerator planetary involute gear drive with small teeth difference N目录摘要 (I)ABSTRCAT (I)1绪论 (1)起重机论述 (1)起重机简介 (1)起重机的主要发展趋势 (2)国外起重机的现状和发展趋势 (3)起重机的技术现状及发展趋势 (4)型钢丝绳电动葫芦存在的不足 (4)国内钢丝绳电动葫芦发展方向 (5)1.4 本课题的主要研究内容 (6)2.传动方案的拟定 (7)引言 (7)传动方案的选择 (7)2.2.1 定轴轮系传动 (7)行星轮系传动 (7)2.3 拟订传动方案 (9)3.电动葫芦的设计计算 (10)钢丝绳的选择 (10)滑轮组的选择 (11)卷筒的设计 (12)电动机功率的选择 (14)电动机的初选 (14)电动机的过载校验 (15)减速器的选择 (15)减速器传动比的计算: (15)传动形式的选取 (16)3.6 初步计算齿轮的主要参数 (16)类型选择及齿轮齿数确定 (16)主要零件的材质和齿轮精度 (16)啮合角及变位系数 (17)啮合角及变位系数确定 (18)几何尺寸计算限制条件检查 (19)切削内齿轮插齿刀的选择 (19)切齿内齿轮的其他限制条件检查 (21)切削外齿轮的限制条件检查 (21)内啮合其他限制条件检查 (21)转臂轴承受力 (23)强度计算 (25)轴的设计计算及校核 (26)3.7.1.初步确定轴的最小直径 (26)3.7.2.轴的结构设计 (26)4结论和展望 (31)结论 (31)4.2 展望 (31)致谢 (33)参考文献 (34)1绪论起重机简介起重机是在一定范围内垂直提升和水平搬运重物的多动作起重机械,又称吊车。
新型门式起重机的设计及优化的开题报告
新型门式起重机的设计及优化的开题报告一、开题背景及研究意义门式起重机是一种重要的工业设备,广泛应用于港口、码头、工厂等领域。
传统的门式起重机存在一些缺点,例如结构复杂、工作效率低下、能耗较高等问题。
因此,如何设计一种新型门式起重机,克服现有门式起重机的缺点,提高其工作效率和安全性,减少能耗,具有重要的研究意义和实际应用价值。
二、研究内容和目标本研究旨在设计一种新型门式起重机,优化其结构和控制系统,提高其工作效率和安全性。
具体研究内容包括:1. 门式起重机的结构设计:根据门式起重机的工作原理和载荷要求,设计一种新型的门式起重机结构,并结合数值仿真等工具对其进行优化。
2. 门式起重机的控制系统设计:设计一种高效可靠的门式起重机控制系统,实现对起重机的精确控制和安全保障,减小对操作员的依赖。
3. 门式起重机的改进和优化:通过实际应用和测试,不断调整和优化门式起重机的结构和控制系统,提高其工作效率和安全性。
本研究的目标是:1. 设计出一种结构简单、性能可靠的新型门式起重机。
2. 实现门式起重机的精确控制和安全保障,并减小对操作员的依赖。
3. 提高门式起重机的工作效率和安全性。
三、研究方法和技术路线1. 文献调研:对门式起重机的工作原理、结构设计、控制系统等方面的相关文献进行综合分析。
2. 结构设计:根据门式起重机的工作原理和载荷要求,设计一种新型的门式起重机结构,并结合数值仿真等工具对其进行优化。
3. 控制系统设计:设计一种高效可靠的门式起重机控制系统,实现对起重机的精确控制和安全保障。
4. 门式起重机的改进和优化:通过实际应用和测试,不断调整和优化门式起重机的结构和控制系统,提高其工作效率和安全性。
四、预期成果和创新点本研究的预期成果:1. 设计出一种结构简单、性能可靠的新型门式起重机。
2. 提出一种高效可靠的门式起重机控制系统,并实现门式起重机的精确控制和安全保障。
3. 在实际应用中不断调整和优化门式起重机的结构和控制系统,提高其工作效率和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为正确地反应起重机的工作性能,本次建 模决定采用shell63和soild45两种单元, shell63是一种平面单元,该单元每个节点 有6个自由度,既有弯曲能力,又有膜力, 可承受平面载荷和法向载荷。Soild45是一 种实体单元,每个单元由8个节点组成,每 个节点有xyz三个方向自由度,能够承受塑 性,大变形和大应变的特征。起重机的主 梁和支架部分采用的是shell63单元,起重 机地梁决定采用soild45单元。对有限元模 型进行网格划分,已划分为16 562个单元 16635个节点。构建的起重机有限元模型如 图2所示。
.2.2 谐响应分析
谐响应分析主要用于确定起重机结构在承受随时问按正弦规律 变化的载荷时的稳态响应。谐相应分析可计算出结构在几种频率 作用下的响应值对频率的曲线,从而,预测结构的持续动力的特 性,验证是否能克服共振,疲劳等由振动引起的有害结果。偕相 应的分析结果如图5所示。 通过模态分析和谐响应分析图,可得出起重机的上下共振频 率主要出现在4~6 Hz和12 Hz左右,由于高阶频率对起重机的 影响较小,故这里只考虑低阶频率。由模态分析得知第五阶频率 主要是上下震动的固有频率,也处于4~6 Hz之间,故将第五阶 频率作为本次优化设计的目标之一。
1.2 起重机载荷分析
起重机的工作环境复杂,受到的载荷种类较多,且变化很大。 故在对起重进行载荷分析时只对起重机受到的几种较典型的载荷 进行分析。通过分析,主要考虑以下几种基本载荷(自重载荷、起 重载荷,水平运动惯性力)和附加载荷(风载荷)等 1.2.1 自重载荷 起重机的自重载荷主要包括起重机主梁自重、电动葫芦自重、支 架自重、地梁自重、操作室自重及起重机上其他设备的自重。考 虑到起重机工作时受到的冲击,在计算自重载荷时要将自重载荷 乘以一定的冲击系数,此处的冲击系数取值为1.25。
3 起重机优化设计
3.1 设计变量 设计变量的确定实质上是结构参数化的过程本次优化 设计的主要参数:上翼缘板厚度T1 ,中间翼缘板厚度 T2, 加强筋厚度T3 ,下斜翼缘板厚度 T4,下翼缘板厚度 T5, 工字型钢端板厚度T6 ,工字型钢中间板厚度T7,中间翼 缘板宽度H11,加强筋板宽度W4。
3.2 约束条件 约束条件即状态变量,本次的约束条件主要包括静强度 约束条件、静刚度约束条件、动位移约束条件、 动刚度约束条件和约束条件上下式。 3.2.1 静强度约束条件 静强度约束条件是指静强度的设计准则为结构中产生的 最大应力不大于结构材料的许用应力[σ],故提取电动葫芦位 于中间位置处的最大应力σLmax 和左右悬臂梁处的最大应力 σlmax ,分别给予约束:
以电动葫芦门式起重机结构为例,基于 ANSYS软件建立起重机的整机模型,对起重机进行 结构分析和优化设计,同时考虑起重机的静态、 模态和谐相应等工作性能,从而全面的反应起重 的整机性能。同时,使用 APDL 语言进行起重机参 数化建模,加载,结构分析和优化设计。通过这 套程序,将大大的缩短同类型不同尺寸的起重机 的开发周期,为起重机的结构设计分析提供了一 种新的设汁方法。
电动葫芦门式起重机动力学 结构优化设计
摘要
采用ANSYS软件的二次开发语言,建立了门式起重 机的有限元模型,对其模型进行静态和动态分析,导到 起重机的变形、应力强度和模态固有频率。以起重机整 体结构为研究对象,以起重机整体质量最小和起重机的 漠态固有频率在满足条件的情况下最大为优化目标,对 起重机的结构参数进行优化设计。优化结果表明,在满 足约氧条件的情况下,起重机的整体质量可以降低21.6 % ,模态固有频率也能够满足起重机要求,降低了起重 机的制造 l;5 本,改善了起重机工作性能。 关键词:起重机;有限元模型;模态;优化设计
图1
1.1.2 基本参数
本次起重机的主要材料决定采用Q345钢,通过参阅 相关文献得到Q345材料主要参数为弹性模量Ex =206 GMP,泊松比 Vxy=0.3,密度DENS=7.85 g/cm^3。 起重机起重主要额定重量Q=12 t,电动葫芦重量200 kg。 起重机尺寸主要参数如表1所列
0 引言
起重机是在复杂情况下的一种大型运输机械,其 本身的结构特性和动态特性都对使用性能有很大 的影响。长期以来,起重机的设计依靠人工设计 和传统经验等方法。这种方法具有很大的局限性。 人们往往只考虑了起重机静态时的工作载荷,而 动态工作载荷常常将其转化为静态工作载荷来考 虑 近些年来,人们开始考虑使用计算机软件对起 重机进行优化设计,但还没有充分地考虑起重机 的动态工作载荷。
2.2 起重机动态分析
2.2.1 模态分析
通过对起重机模态分析,现得到起重机的前6阶振动频 率如表2所列。
第1阶频率主要反映起重机在横向方向的振动,此振 动可能有起重机的启动,制动等引起,第2阶频率主要 反映起重机的纵向方向的振动,此振动可能由电动葫 芦的启动和制动时引起,第3阶,第4阶主要反映了横 向振动的固有频率,第5阶反映了起重机的上下振动的 固有频率,第6阶频率反映了起重机的横向振动的固有 频率。
现将以起重机的整体质量为目标函数的优化结果数据带人 程序重新进行计算,计算后得到的起重机的最大变形和最大 应力分别如图6、7所示。
结果表明,以起重机的整体质量为目标函数对起重机进 行结构优化设计后,起重机的最大变形为0.013 m,最大应 力为156 MPa,均能够满足起重机的强度和刚度要求,但起重 机的整体质量减少了21.6%。现将以起重机的第5阶频率为 目标函数的优化结果数据带入程序重新计算,计算后得到的起 重机的第5阶频率如图8所示。 结果表明,以起重机的第5阶频率为目标函数对起重机进 行结构优化设计后,起重机的第5阶频率由原来的4.856 Hz 变为了4.577 Hz,比原来减小了0.279 Hz。
1、模型建立与加载分析
1.1模型结构与基本参数 1.1.1 模型结构 本次起重机模型采用的是某起重机有限责任公 司的MH型电动葫芦门式起重机。整个起重机部分 包括主梁,支架和地梁三大部分。其中,起重机的 主梁部分采用的是箱型主梁结构,起重机支架部又 分为左、右两部分支架,左支架为分叉结构, 支架 要承受起重机操作室的重量。其重要结构图如图1。
fs≥2
( 9)
3.2.5 约束条件上下式 设定设计变量胡上下式约束为:
3.3 目标函数 优化目标函数分别采用起重机的整体质量最小为目 标和电动葫芦位于跨中位置时的起 宦机上下自震频率最 低为目标。所以目标函数分别为:
3.4 优化结果
根据上述模型,利用ANSYS有限元软件的优化模块进行 优化。优化后的结果是一组离散的数据。其优化前后的各设计 变量如表4、5所列。
1.2.2 起升载荷 起升载荷主要是指起升质量的重力,其包括起重量,吊具和 钢丝绳等的重量。在计算起重载荷时,要考虑由于起升和制动 等对起重机工作性能的影响,所以也要将起升载荷乘以一定的 动载荷系数,此处的动载荷系数取值为1.2。 1.2.3 水平运动惯性力 起重机在水平方向运动时,考虑到水平方向的加速,制动 等对起重机工作性能造成的影响,所以,还需要考虑水平运动 惯性力,即: PH= Ψ5ma (1) 式中:a为启动、制动加速度; Ψ5为系数,通常取值1≤ Ψ5≤2, 本文取值为1.5。
σLmax≤ [σ]
(2)
σlmax ≤ [σ]
(3)
3.2.2 静刚度约束条件
根据《起重机设计规范》中的规定,提取起重机中的 状态变量给予以下约束,约束:
YL ≤ L/800 Yl≤ l/350
(4)
(5)
(6) (7)
uL≤6 mm ul≤6 mm
式中: YL 为跨中垂直静挠度; Yl 为有效悬臂端垂直 静挠度; uL为跨中节点水平位移; ul 为有效悬臂出节点水 平位移。
1.2.4 附加载荷 门式起重机主要是露天作业,考虑到起重机在露天 环境下可能会受到风作用等,所以,还将考虑一定作 用的风载荷,本文将风载荷分为工作状态风载荷和非 工作状态风载荷两种。 1.2.5 约束条件 考虑起重机运行机构的约束条件,对起重机地梁下 端进行自由度约束,得到龙门起重机的受力模型。
4. 结语
通过有限元软件优化方法,以电动葫芦门式起重机为 研究对象,以起重机的整机质量和固有频率为优化目标,以 起重机的强度,刚度和动位移等为约束条件,建立了起重机 的优化设计模型,对起重机进行了优化设计。结果表明,该 方法能够有效地减轻起重机的质量和改变起重机的模态固有 频率,为起重机的优化设计提供了一个较好的优化设计方法。
2 起重机受力分析
2.1 起重机静态受力分析 对起重机进行静态受力计算,分析结果进行后处理,分别得 到起重机受力后的最大变形和最大应力如图3、4所示。
通过分析可知,最大变形出现在起重机的中间 位置,最大变形值为0.023 m,最大应力值出现 在分叉支架有效悬臂梁处,最大应力值为123 MPa。其最大变形和最大变形应力均小于许用挠 度和许用应力,且有一定的富余,所以有很大的 优化设计空间。
3.2.3 动位移约束条件
限制龙门起重机动位移的最大值与起重机静 位移的最大值相同,故应提取瞬态动力学分 析.厅中跨中节点的最大位移δd 进行约束,即: δd≤L/800 (8)
3.2.4 动刚度约束条件
根据《起重机设计手册》,电动葫芦门位于 起重机跨中位置时,起重机的上下自震频率 fs立 该大于2Hz,但是起重机的模态频率应该在满足 要求的情况下越小越好。