automod仿真实验设计
基于AutoMod仿真平台的有色金属立体仓储存放系统仿真分析

关键词 : 立体仓储 ; 粒子群算 法 ; uo d A tMo
;
【 src】 a sd i e n o dr o-eru ea at ainmut l ee oeos ss Abtat H etUs doe w eynnfr sm t u m t l-a rds rhue y一 s r h p o l o o i y t
nn m c o n r igt eac u t i s
(Ke a oaoyo o tmp rr e it a d Itgae n fcu igT c n lg f nsr f d ct n yL b rtr fC ne oayD sgl n ne rtdMa ua t r e h oo yo i yo u ai , n Mi t E o
No twetr oye h ia ies y Xia 1 0 2, h n ) r h sen P ltc nc l v ri , ’n7 0 7 C ia Un t
【 摘
要】 建立了一种粉末状有色金属 自 动化立体仓库 系统, 介绍了 基于粒子群算法, 应用改进的粒
子群算法对堆垛机 作业 系统进行 了优 化 , 用 A tM d 真试验 平 台, 应 uo o 仿 建立 了该 自动化 仓储 系统 的实体
p oe n ri rvme t an s b op (grh oteh ys c e ok,s m, pi h uo ds l in g u g u  ̄ oi m t h a t k r r s t a l steA t r t a w ye p e Mo i a o mut :t t g lf r etbi e h uda t t ae o s gss m' ulsae c u h b ̄ndtee— e i pa om,s l hdso l u ma w rh ui t s l cl mokp,a o t e x sn t a s o e n ye - f s h
AGV系统调度策略在AutoMod仿真模型中的实现

AGV系统调度策略在AutoMod仿真模型中的实现关于《AGV系统调度策略在AutoMod仿真模型中的实现》,是我们特意为大家整理的,希望对大家有所帮助。
摘要:AGV系统在物料柔性搬运中是一个非常重要的环节。
如何准确评估AGV系统的运行效率,特别是在项目前期确定AGV 数量及路径优化,是非常重要的课题。
本文建立了基于AGV实际调度策略的仿真模型,为评估AGV系统运行效率提供了实用的仿真方法。
下载论文网/2/view-547491.htm关键词:仿真、AGV、效率坪估、AutoMod随着自动化物流技术的逐步推广,AGV(自动搬运小车)系统的应用领域越来越广泛。
与此同时,由于商业保密、系统运行不确定等原因,关于AGV效率评估方面的研究到目前为止还是一片空白。
由于缺乏相关的理论研究支持,用于评估AGV效率的手段也比较缺乏。
目前主要有两种评估方法:一是采用计算手段,但得到的结果比较粗放,准确性较差,而且数据太少,不足以全面评估AGV的效率;二是采用仿真手段,目前主流应用于物流领域的仿真软件如AutoMod、FlexSim、EM Plant等均提供了类似的调度策略,但各软件生产商均没有针对AGV的实际应用环境、车辆管理策略、交通管理策略、任务调度策略等进行仿真技术及方法的开发应用,只具备一些基础性的调度策略,因此导致AGV 系统仿真模型在一定程度上存在与实际情况不相吻合的问题,造成仿真结果偏差大,对系统设计和设备配置的指导意义较差,而需要更多地依靠经验数据和计算结果。
针对这一现状,亟需运用仿真软件生产厂商提供的各种内部函数和接口,建立符合AGV实际运行要求的调度策略模型,通过仿真软件的应用者编制相应策略,为实现实际调度仿真提供可能。
本文提出的基于AutoMod仿真软件实现的AGV调度策略仿真模型,就是针对AGV系统效率评估提出的一种有效解决方案。
AGV系统调度策略的仿真建模方法1建模中采用的几个概念以下几个为系统常量,整个系统内所有AGV小车均取同一固定值。
AutoMod系统建模与仿真实验指导书
系统建模与仿真
实验指导书
北京邮电大学 自动化学院 北京亿特克科技有限公司 答案整理
目录
概述 AutoMod 软件简介和仿真试验综述 .............................................................................. 1 实验一 简单流水作业线仿真 ............................................................................................... 8 实验一 简单流水作业线仿真详细解析 ........................................................................... 11 1 新建一个模型 ............................................................................................................. 12 2 定义各种实体单元 ..................................................................................................... 13 3 绘制模型平面布置图 ................................................................................................. 20 4 定义 Source File .......................................................................................................... 21 5 设定 Run Control ......................................................................................................... 22 6 模型运行 ..................................................................................................................... 22 7 查看运行结果 ............................................................................................................. 25 8 模型优化 ..................................................................................................................... 26 附录 Source File 的内容 ................................................................................................ 27 实验二 传送带系统仿真 ..................................................................................................... 30 实验二 传送带系统仿真详细解析 ................................................................................. 33 1 创建一个新的模型 ...................................................................................................... 33 2 定义各种实体单元 ...................................................................................................... 38 3 绘制模型平面布置图 ................................................................................................. 41 4 定义 Source File .......................................................................................................... 41 5 设定 Run Control ......................................................................................................... 42 6 定义 Business Graphics ............................................................................................... 42 7 模型运行 ..................................................................................................................... 44 8 查看运行结果 ............................................................................................................. 45 9 模型优化 ..................................................................................................................... 46 附录 Source File 内容 ..................................................................................................... 46 实验三 循经运动系统仿真 ................................................................................................. 49 实验三 循径运动系统仿真详细解析 ............................................................................. 53 1 创建一个新的模型 ..................................................................................................... 53 2 定义 Path Mover 子系统 pm ...................................................................................... 55
基于AutoMod仿真的最短路径选择
基于AutoMod仿真的最短路径选择1提出问题Dijkstra算法是运筹学中常用的求最短路径的方法,很多学者都利用这种算法进行了最短路径的求解研究。
王海晓将Dijkstra算法运用到物流运输路径的选择算例中,通过对每个节点的扫描得出了最短运输路径。
王凌等对最短路径算法进行了优化,并在GIS系统中进行仿真,实现了最短路径的寻求和最短路径的结果分析。
但是仔细分析便可发现,以上算法无论是计算步骤还是编写的程序都比较复杂。
AutoMod软件应用广泛,仿真效果明显,能直观地表现物流各环节运作情况。
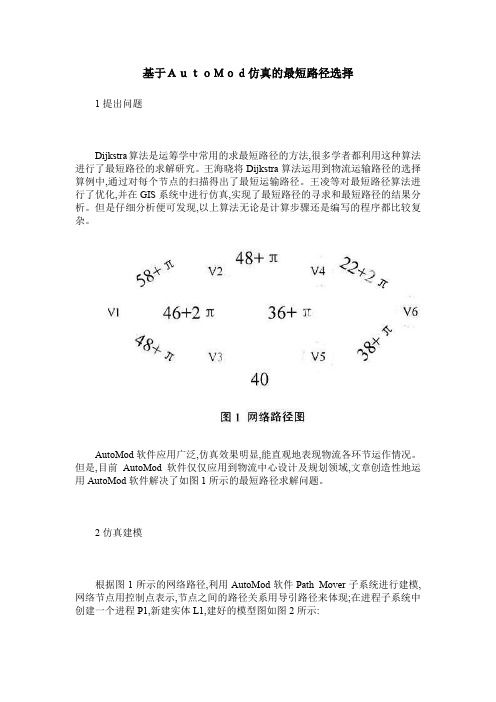
但是,目前AutoMod软件仅仅应用到物流中心设计及规划领域,文章创造性地运用AutoMod软件解决了如图1所示的最短路径求解问题。
2仿真建模根据图1所示的网络路径,利用AutoMod软件Path Mover子系统进行建模,网络节点用控制点表示,节点之间的路径关系用导引路径来体现;在进程子系统中创建一个进程P1,新建实体L1,建好的模型图如图2所示:其source file中的逻辑语法设置为:begin P1 arrivingmove into path1.v1travel to path1.v6end3仿真结果对建好的模型进行运行,小车将会选择最短路径到达目的地。
图3是小车在5分50秒时的运行情况。
此时,小车在选择通往目的地的途中,其路径选择为v1—v3—v5—v6。
4结语文章利用AutoMod软件对如图1所示的网络路径进行了仿真,求出了最短路径。
通过上述研究表明,利用AutoMod软件确实能通过简单的语法及建模操作,实现最短路径的选择,而且最短路径的选择很直观。
今后的研究可充分发掘控制点和导引路径之间的关系,对具有更复杂的节点和路径的网络进行建模求解。
参考文献:[1] 王海晓.Dijkstra算法在求解物流运输最短路径中的应用[J].价值工程,2009,(5):82-84.[2] 王凌,段江涛,王保保.GIS中最短路径的算法研究与仿真[J].计算机仿真,2005,(1):117-120.。
AutoMod仿真软件在回收仓库分拣系统设计中的应用

果加 以分析 ,得 出的 结论 在 实际操作 过程 中有 重要 的参考 价值 。
[ 关键 词 ]废 旧机 电产品 ;回收仓 库 ;分拣 系统 ;A u t o Mo d ;仿真 模型 [ 中图分 类号 ]T P 3 9 1 [ 文献标 识码 ] A [ 文章 编号 ] 1 0 0 5—6 4 3 2( 2 0 1 3 )1 8— 0 0 1 8—0 3 否 符合 直接 可利 用 的条 件 ,符 合 就 被 运 往 A地 ,不 符 合 就 运往 B检 测处 ;B类 产品从 B货 区被 送往 B检测 处 ,检
2 回收 仓库 分拣 系统描 述 与仿 真程序 框 架
我们 以废 旧机 电产 品为例 ,对其 回收仓库 的分拣 系 统
进行 设计 。废 旧机 电产 品 分拆 后 零 部 件 的处 理 方 式有 四
种 :再 利用 Leabharlann 再制 造 、再循 环 、掩 埋 。
( 5 ) A、 B、 c 三 种 零 部 件 的 合 格 率 分 别 9 5 %、
[ 摘 要 ]随 着可持 续发展 和 环境 保 护 的观 念 不 断 深入 人 心 ,回收 物 流越 来 越 受到 重 视 ,其 经 济价 值 也 越 来 越 明
显 。本 文 以废 旧机 电产品 为例 ,用 A u t o Mo d仿 真软件 对其 回收仓 库分 拣 系统进 行 了设 计 ,建立仿 真模 型 ,对模 型运 行 结
合 为止 ;C类产 品从 c货 区被送 往 c检测处 ,检 测是 否不 符合再 制造 的 条件 ,不 能 进 行 再 制 造 就 被 运往 c地 ,能
进行 再制 造就 运往 B检测 处 。
科 技含 量 的 自动 化处 理 模 式 成 为 现 代 分 拣 的 主要 实 现方
AutoMod仿真软件在回收仓库分拣系统设计中的应用

AutoMod仿真软件在回收仓库分拣系统设计中的应用摘要:随着可持续发展和环境保护的观念不断深入人心,回收物流越来越受到重视,其经济价值也越来越明显。
本文以废旧机电产品为例,用AutoMod仿真软件对其回收仓库分拣系统进行了设计,建立仿真模型,对模型运行结果加以分析,得出的结论在实际操作过程中有重要的参考价值。
关键词:废旧机电产品;回收仓库;分拣系统;AutoMod;仿真模型20世纪90年代以来,废弃产品引发的环境污染和空间占用问题引起了全球的广泛关注,据中国统计局资料,依据产品销售量和产品平均寿命期进行估算,自2006年起,每年将会有大约1000万台电脑、2000万台电视、500万台电冰箱、1000万台洗衣机及600万台空调需要报废;而在汽车领域,根据“The Society of Motor Manufacturers and Traders Limited”(SMMT)2003年调查,全球汽车保有量当年已达8148900万辆,发达国家通常将本国的汽车保有量乘以7%得出当年汽车应报废辆,如此算来,全球每年的应报废汽车数量已达到570423万辆。
[1]面对日益严重的环境污染和资源过度消耗问题,回收物流的作用显得尤为重要,其经济价值也越来越明显。
1 回收仓库的分拣系统分拣是把不同的物品按照一定的原则分类,实现物品有序的空间位置搬移。
随着现代科技的高速发展,具有高科技含量的自动化处理模式成为现代分拣的主要实现方式,它通过各种设备可以高效、准确地判别物品的体积、重量或者颜色等物理属性,也可以自动识别各种载体信息,依照不同的管理要求而设定不同的处理逻辑关系达到分拣的目的。
随着商品经济的发展,用户需求向小批量、多品种方向的发展,仓库中货品的种类和数量增多,分拣环节成为核心工序,分拣作业所占的成本也越来越高。
回收物流与正向物流有很大不同,回收物流中的产品种类繁多,回收产品的性质差距大,有些不同的回收产品不可以放在一起,所以,回收仓库中分拣工作起着非常重要的作用。
基于AutoMod的自动分拣系统建模与仿真

G ij I u k n, — i HA GZ e gmig AOL-i , UY — u 。 Yu x Z N h n— n  ̄ eL HU n (.c olf uo t nB in nvri P s &T l o 1Sho A tmao , e ig iesy f ot ee mmu i tn, ej g10 7 o i j U to s c nc i sB in 8 6 ao i 0
[ 要】 摘 首先分 析了 自动分拣 系统 的控制信息流 、 真需求 以及仿 真建模功能要求 , 仿 然后 结合 A t o u M d三维仿 真软件 , 出 o 提 了 自动分拣 系统 的三维建模思路 和方法 ,并结 合基于 A t o 仿真软件建立 的交叉带式 和翻盘式 自动分拣 系统 的仿真模型 , u Md o 说 明 了具体的实现方法 , 提高 了物流 自动分拣 系统 三维建模的效率 。 [ 关键  ̄] t d 自动分拣系统 ; Auo ; Mo 仿真建模 ; 精确度 [ 中图分类-12 39  ̄ F 7 . - 【 文献标识码】 A 【 文章编号】0 5 1 2 2 1 )8 0 3 — 3 10 — 5X( 0 0 0 — 13 0
不 同功 能模 块的建模方法 。结 合 A tM d仿 真软件分别建立 uo o
了交叉 带式 翻盘式 自 动分拣 系统的仿真模 型 , 明 了具体_ 说 的
实现方法 。
2 I 自动分拣 系统仿真建模分析
21 自动分 拣 系统 的控 制信 息流 分析 .
常 见 的 物 流 自动 分 拣 系 统 主 要 有 交 叉 带 式 分 拣 系 统 、 滑
基于AutoMod的堆场作业的仿真研究

Vb.1 No2 1 . . 3
Ap . 0 1 r2 1
本 刊 核心 层 次论 文
基 于 Auo d的堆 场 作 业 的仿 真 研 究 tMo
王殿 超 ,魏 丹 , 石 晶 , 金 辉
( 辽宁 工 业大 学 汽 车与 交通 工 程学 院 ,辽 宁 锦州 1 10 ) 2 0 1
摘
要 : 利 用 Auo o 仿 真软 件 , 模 拟 集 装 箱 码 头集 疏 运 的静 态 运 行 模 式 ,通 过 计 算 , 比较 分 析 专 用 泊 位 tM d
A bsr c : U sn Aut M o sm u ai s fwa e t sa i o r ton m o o c l ci , ta t ig o d i lton o t r , he t tc pe a i de f ol t e ng d srb tn iti u i g,ta p rai n o on ane e m i a ,t e pr c s i tm e o o lc i g,d srb tn a d r ns o to f c t i r tr n l h o e sng i f c le tn t iti u i g n
与 公用 泊位集疏运的处理 时间,从而辅助 管理者做 出决策 ,满足集装箱码 头运 输快速有效的需求 ,缩短船舶在港
停 泊 时 问 , 有 效 利 用 人 力 、 泊位 、 堆 场 和 装 卸 设 备 资源 等 。
关键 词 :Auo d tMo :静 态 运 行 模 式 ; 专用 泊 位 ; 公用 泊 位 中 图 分 类 号 : U 5 63 文 献 标 识码 :B 文 章 编 号 : 17 —2 12 1)20 2 —3 6 43 6 (0 10 —150
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 实验设计
对于库存系统,管理者往往比较关心供应链的成本和产品满足率的问题。
因此将年总成本和产品满足率作为该系统的响应。
其中:
产品满足率= 出库总量/订单总量
供应链总成本= 总库存成本+总订货成本
= 年平均库存*单位库存持有成本+单次订货成本*年订货次数
上式中,产品满足率是指以库存来满足的那部分市场需求所占的比率。
供应链总成本的计算中,认为供应链不存在缺货损失,因而不考虑缺货成本。
根据上述目标绩效,对模型的输入进行分析可知,参数K,H可能会对绩效指标产生影响。
Q
从上式可以看出,K,H会对最优订货量Q产生影响,则选取K/H来分析。
类型
因子K/H
响应供应链总成本,产品满足率
(正交实验设计)
2. 输出数据分析
该库存系统仿真为非终止型仿真,则选取批均值法进行分析。
仿真运行2500天,删除前730天的数据,将剩下的数据分成4批,每批长度为365天。
统计数据
统计项批次粮食销售点企业储备库销区储备库产区储备库
库存均值1 137.5 321.1350.8393.4
2 131.8 312.0 345.7 389.1
3 136.7 320.6 355.8 398.0
4 133.9 308.6 345.4 394.1
订货次数1 58 51 43 35
2 61 5
3 46 39
3 60 52 4
4 36
4 62 5
5 48 40
区间估计
估计项
95%置信区间
均值下限上限
库存均值
销售点135.0 130.8 139.1 企业储备库315.6 305.6 325.5 销区储备库349.4 341.6 357.3 产区储备库393.7 387.8 399.5
订货次数
销售点60 58 63 企业储备库53 50 55 销区储备库45 42 49 产区储备库38 34 41
供应链总成本= 总库存成本+总订货成本=159265
估计项
95%置信区间
均值下限上限
出库量16295 15856 16734
需求16420 15914 16926 产品满足率=99.2%。