汽车前轮转向机构说明书
前桥转向结构及原理
g、方向摇晃或跑偏
方向跑偏的故障首先应检查机械部分和外界因素。 汽车行驶在拱形路面 的一侧上本身就有偏跑的倾向,当拱形较大时跑偏就较为明显是外界的因素 造成的。 前轮两边轮胎气压不同、一边是新轮胎另一边是旧轮胎或左右胎磨损差 异较大、前钢板错位(例如钢板中心螺栓)、前轮定位偏差较大等都会造成方 向跑偏。如果排除上述机械和外部因素,方向仍然严重跑偏,那就可能是转 向机内控制转向螺母偏摆杆初始位臵调整不当,使汽车直线行驶时,转向螺 母在偏臵位臵,偏臵的滑阀总使活塞某一侧产生高压助力,造成汽车自动跑 偏。 如果汽车行驶时无规律地两边摇晃,方向不好掌握,说明转向系统机械传 动各机构较松旷。例如前轮轮鼓轴承松旷、转向轴扇齿与活塞直齿间隙过大、 横直拉杆球头松旷、转向机固定螺丝松旷、前轮定位有较大的偏差等等。前 轮钢圈变形当然也会引起方向的抖动,如果排除上述的机械原因,则很可能 是转向机内定位转向螺母的偏摆杆折断或松旷所致。
b、单边转向沉重
在实际中往往发生向一个方向转向轻快,而向另一个 方向转向沉重的故障,这一般是由于负责密封一侧高压 腔的密封件漏损所至。倒如转向螺杆密封圈、活塞圆周 上油道密封圈等。 还有一种情况应当注意,那就是转向沉重,一侧的限 位阀封闭不严。封闭不严可能是调整不当,使该限位阀 大部分在常开位臵,或是阀与阀座封闭不严,更多的情 况是限位阀上两个“0”型密封圈失效所致。 有的时候会发生向某一方面转向时从头至尾都很轻, 而向另外一个方面打方向时,开始很轻,每打到某一个 位臵,方向就突然沉重。这种故障一般来讲是由于该方 向的限位阀调整不当,使车轮还没有到极限位臵时,限 位阀就打开卸荷,此后方向立刻沉重。遇有此故障只要 按上节所述进行限位阀的重新调整就行了。
转向系统常见故障以及排除
一般来讲引起方向重的原因有如下几种: 1)助力泵故障 通过试验判断助力泵的泵压达不到标准值时,显然方向 沉重与此有关。首先应检查流量控制阀与阀座的啮合面、安 全阀钢球是否封闭不严。如果是流量阀或安全阀泄漏,可通 过研磨的方法修复。其次再检查安全阀的弹簧是否失效。这 点可通过在弹簧后面加垫片的方法检查,如果在弹簧后面增 加一垫片后,最大泵压有明显增加,说明弹簧失效。如果这 两个部位都无问题,则应拆卸解体助力泵,观察叶片泵的腔 壁是否磨损和拉伤。因腔壁拉伤会使高、低压腔相通,从而 造成压力建立不起来。一般拉伤的原因都是油脏所至。如果 方向突然沉重,则应检查是否是泵轴断
汽车前轮转向机构说明书.doc
机械原理与设计训练I ——汽车前轮转向机构说明书目录设计题目 (2)设计要求 (2)设计内容(原始数据) (3)第一题 (3)第二题 (3)思考题 (7)第三题 (9)第四题 (10)参考资料 (12)机构简介汽车的前轮转向,是通过等腰梯形机构ABCD 驱使前轮转动来实现。
其中,两前轮分别与两摇杆AB 、CD 相连,如下图所示。
当汽车沿直线行驶时(转弯半径R =∞),左右两轮轴线与机架AD 成一条直线;当汽车转弯时,要求左右两轮(或摇杆AB 与CD )转过不同的角度αβ、。
理论上希望前轮两轴延长线的交点P 始终能落在后轮轴的延长线上。
这样,整个车身就能绕P 点转动,使四个轮子都能与地面形成纯滚动,以减少轮胎的磨损。
因此,根据不同的转弯半径R (汽车转向行驶时,各车轮运行轨迹中最外侧车轮滚出的圆周半径),就要求左右两轮轴线(AB 、CD )分别转过不同的角度α和β,其关系如下:如图所示为汽车右拐时: tan /()L R d B β=-- , tan /()L R d α=- 所以α和β的函数关系为: cot cot /B L αβ-=同理,当汽车左拐时,由于对称性,有cot cot /B L βα-=,故转向机构ABCD 的设计应尽量满足以上转角要求。
二、设计要求设计数据见下表。
要求汽车沿直线行驶时,铰链四杆机构左右对称,以保证左右转弯时具有相同的特性。
该转向机构为等腰梯形双摇杆机构,设计此铰链四杆机构。
参数 轴距 轮距 最小转弯半径 销轴到车轮中心的距离符号 L B min R d单位 mm mm mm mm 型号 涂乐GRX 2900 1605 6100 400涂乐GL 2900 1555 6100 400尼桑公爵 2800 1500 5500 500现选择第二组数据进行解答1)根据转弯半径min R 和max R =∞(直线行驶),求出理论上要求的转角α和β的对应值。
要求最少2组对应值。
解: 当L=2900,B=1555,R min =6100,d=400时, 根据公式 tan /()L R d B β=-- tan /()L R d α=-解得:⎩⎨⎧=︒==︒=0.61rad34.9847rad.097.26min min βα当L=2900,B=1555,R ∞=9000,d=400时, 根据公式 tan /()L R d B β=-- tan /()L R d α=- 解得:⎩⎨⎧=︒==︒=0.39rad 37.2233rad.063.1890009000βα2)用解析法设计铰链四杆机构ABCD ,满足以下条件:①最小转弯半径min R 所对应的α和 β满足P 点落在后轴延长线上的要求;②其他各组α和β尽可是能使P 点落在后轴延 长线上;③尽可能满足直线行驶时机构左右对称的附加要求。
汽车结构原理转向系详解
21.2.2 与独立悬架配用的机械转向系
1、转向操纵机构: 转向盘、安全转向柱、转向柱转换器、转
角限制器
2、转向器
4.摩擦离合器所能传递的最大转矩取决于摩擦面间的____________。
5.在设计离合器时,除需保证传递发动机最大转矩外,还应满足________、 ________、_________及_________等性能要求。
6.摩擦离合器基本上是由_________、__________、__________和_________等 四个部分构成的。
转向节臂
转向节 梯形臂
横拉杆
转向梯形
转向操纵机构:从转向盘到传动轴的一系列零部件。
转向传动机构:转向摇臂、转向主拉杆、转向节臂、 梯形臂、转向横拉杆。
转向器:起减速增扭作用的减速传动机构。
转向梯形:由左右梯形臂、转向横拉杆、前轴构成转 向梯形。其作用是保证左、右转向轮按一定规律进 行偏转。
机械式转向系的工作过程
(3)传动副的传动特点
正传动效率很高,操纵轻便,使用寿命 长。但逆效率也高,容易将路面冲击力传到 转向盘上,易出现转向盘“打手”现象。
3、转向传动机构
功用:将转向器输出的力传给转向轮,且使二转向 轮偏转角按一定的关系变化,实现汽车顺利转向。 要求:较大的刚度和强度
吸收振动、缓冲 分类:非独立悬架配用转向传动机构
21.3 助力转向系
功用:在转向阻力较大时,可以减轻驾驶员的 疲劳强度,改善转向系统的技术性能。 分类: 1、按工作介质分 液压式: 以液压为ห้องสมุดไป่ตู้力源。工作时无噪声,工 作滞后时间短,且能吸收来自不平路面的冲击, 应用广泛。 气压式: 以压缩空气为动力源。 前轴最大轴载 质量为3~7吨并采用气压制动的货车。
汽车前轮转向原理
汽车前轮转向原理
汽车前轮转向原理是指汽车在行驶过程中,通过转向系统使车辆前轮产生转向运动,从而改变车辆行驶方向的原理。
汽车前轮转向原理的实现,是通过转向系统和悬挂系统共同完成的。
下面将从转向系统和悬挂系统两个方面来详细介绍汽车前轮转向原理。
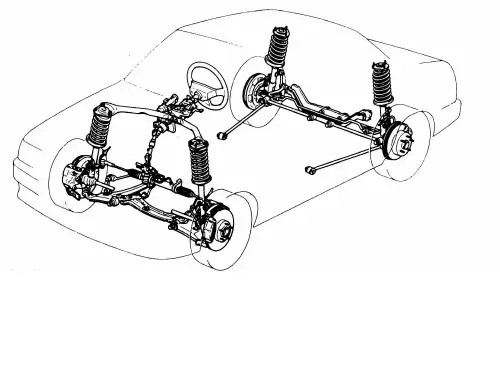
转向系统是汽车前轮转向的关键部件,它由方向盘、转向齿轮、传动杆、转向节、转向臂、转向销等组成。
当驾驶员通过方向盘施加转向力时,转向齿轮通过传动杆将转向力传递给转向节,再通过转向臂和转向销使车辆前轮产生转向运动。
转向系统通过这样的工作原理,实现了对车辆前轮的控制,从而改变了车辆的行驶方向。
悬挂系统是汽车前轮转向的支撑系统,它由弹簧、减震器、悬挂臂、横拉杆等组成。
在车辆行驶过程中,悬挂系统能够有效地减少路面颠簸对车辆的影响,保证车辆稳定性和行驶舒适性。
同时,悬挂系统还能够根据路面情况对车辆前轮进行调节,使车辆前轮保持与地面的良好接触,从而保证转向系统的正常工作。
汽车前轮转向原理的实现,需要转向系统和悬挂系统的协同配合。
当驾驶员通过方向盘施加转向力时,转向系统将转向力传递给车辆前轮,同时悬挂系统保证车辆前轮与地面的良好接触,从而使车辆前轮产生转向运动,改变车辆的行驶方向。
这样,汽车前轮转向原理就得以实现。
总的来说,汽车前轮转向原理是通过转向系统和悬挂系统的协同配合,使车辆前轮产生转向运动,从而改变车辆行驶方向的原理。
转向系统通过方向盘施加转向力,悬挂系统保证车辆前轮与地面的良好接触,两者共同完成了汽车前轮转向的任务。
汽车前轮转向原理的实现,不仅是汽车行驶的基础,也是驾驶员操控车辆的关键。
汽车转向桥桥设计说明书
汽车转向桥设计说明书任务书要求:(1)了解汽车转向桥的结构,功能(2)进行汽车转向桥的受力分析(3)总体方案设计(4)画出转向节的零件图(5)画出转向桥的总装图一、概述转向桥是利用转向节使车轮偏转一定的角度以实现汽车的转向,同时还承受和传递汽车与车架及车架之间的垂直载荷、纵向力和侧向力以及这些力形成的力矩。
转向桥通常位于汽车的前部,因此也常称为前桥。
各类汽车的转向桥结构基本相同,主要有前轴(梁)、转向节、主销和轮毂(1)前轴:由中碳钢锻造,采用抗弯性较好的工字形断面。
为了提高抗扭强度,接近两端略呈方形。
前轴中部下凹使发动机的位置得以降低,进而降低汽车质心,扩展驾驶员视野,减小传动轴与变速器输出轴之间的夹角。
下凹部分的两端制有带通孔的加宽平面,用以安装钢板弹簧。
前轴两端向上翘起,各有一个呈拳形的加粗部分,并制有通孔。
(2)主销:即插入前轴的主销孔内。
为防止主销在孔内转动,用带有螺纹的楔形销将其固定。
(3)转向节:转向节上的两耳制有销孔,销孔套装在主销伸出的两端头,使转向节连同前轮可以绕主销偏转,实现汽车转向。
为了限制前轮最大偏转角,在前轴两端还制有最大转向角限位凸块(或安装限位螺钉)。
转向节的两个销孔,要求有较高的同心度,以保证主销的安装精度和转向灵活。
为了减少磨损,在销孔内压入青铜或尼龙衬套。
衬套上开有润滑油槽,由安装在转向节上的油嘴注入润滑脂润滑。
为使转向灵活轻便,还在转向节下耳的上方与前轴之间装有推力轴承11;在转向节上耳与前轴之间,装有调整垫片8,用以调整轴向间隙。
左转向节的上耳装有与转向节臂9制成一体的凸缘,在下耳上装有与转向节下臂制成一体的凸缘。
两凸缘上均制有一矩形键与左转向节上、下耳处的键槽相配合,转向节即通过矩形键及带有键形套的双头螺栓与转向节上下臂连接。
(4)轮毂:轮毂通过内外两个滚锥轴承套装在转向节轴颈上。
轴承的松紧度可以由调整螺母调整,调好后的轮毂应能正、反方向自由转动而无明显的摆动。
轿车前轮悬挂及转向机构--页PPT文档
动力转向系统是在机械 转向系统的基础上加设 一套转向加力装置而形 成的。
二、转向操纵机构
1、转向操纵机构的组成及布置
组成:转向盘、转 向柱管、转向轴、 上万向节、下万向 节和转向传动轴等。
2、转向操纵机构的部件及安全装置 ⑴.转向盘
悬架系统的概述
一、功 用
汽车悬架是车架(或承载式车身)与车桥(或车轮)之间一切传力装置 的总称。它具有以下功用:
(1)对不平整路面所造成的汽车行驶中的各种摇摆和振动等,与轮 胎一起,予以吸收和减缓,从而保障乘客和货物的安全,并提高驾 驶稳定性。
(2)将路面与车轮之间的摩擦所产生的驱动力和制动力,传输至车 架和车身。
转向盘的构造
(2).转向轴和转向柱管及其吸能装置
对于轿车要求转向柱管必须装备能够缓和冲击的吸能装置。其基本结构 原理是:当转向轴受到巨大冲击而产生轴向位移时,使支架或某些支承件 产生塑性变形,从而吸收冲击能量。
汽车装用网格状转向柱管或波纹管式转向柱管的吸能装置,当发生猛 烈撞车导致人体冲撞到转向盘上的力超过允许值时,则网格部分或波纹 管部分将被压缩,产生塑性变形,吸收冲击能量,以减轻对人体的伤害。
转向系统的功用是:保证
汽车能够按照驾驶员的意图沿给 定方向行驶。
一、转向系统类型和组成
1.机械转向系统 组成:转向操纵机 构、转向器、转向传 动机构。
从转向盘到转向器 之间的零部件,均属 于转向操纵机构。由 转向器至转向节之间 的零部件(不含转向 节),均属于转向传 动机构。
2.动力转向系统
空气式可调悬挂 调整原理:
类型
液压式可调悬挂 电磁式可调悬挂
机械原理课程设计-----汽车前轮转向机构
最优方案设计
3.传动连接杆
传动连接杆为直角构件,连接传动主杆和这轮系统,将主杆动力传输至车轮转向系统同时约束车轮转动的方向和角度
最优方案设计
4.车轮系统
车轮系统由车轮和转向连杆两部分组成,转轴固定于底板之上,同时与传动连接杆相组合,通过配合连接杆的运动实现两侧车轮系统绕底板固定轴平行转动,保证了转向的精确
方案三:基本结构是一对相互啮合的小齿轮和齿条。 转向轴带动小齿轮旋转时齿条便做直线运动。齿条作为传动主杆,其两端与传动连接杆组合将动力传输给车轮转向系统,并通过连接杆件间的配合协作来控制车轮转向的方向和不同的角度。
方案四:通过转动方向盘,带动方向盘直连的杆件转动,通过直连的末端电控单元检测转动角度和车速等数据,通过蜗轮蜗杆辅助转向。再通过两段万向节的杆件机构传动到底盘上的蜗轮蜗杆,带动四杆机构(双摇杆机构)使车辆转向
感谢观看
延时符
四、最优设计方案
最优方案设计
三维建模
最优方案设计
1.动力齿轮
动力齿轮按照方向盘的不同转动方向而转动,同时与动力主杆上的齿键相咬合推动主杆平行移动
最优方案设计
2.传动主杆
传动主杆为带有齿的平直杆件,通过与齿轮的咬合接收传动齿轮传输的动力平行移动,并根据齿轮转动方向不同改变移动方向,两端与传动连接杆组合,将动力传输至后续结构
三、设计方案展示
方案一:利用螺纹咬合的传动原理,将方向盘的旋转传动为杆件的横向移动,从而带动转向梯形结构转动,使得两侧车轮得以向相同角度,相同方向转动带动车体转向
方案二:汽车前轮转向机构运用平面四杆机构,该转向机构为等腰梯形双摇杆机构,铰链四杆机构左右对称,保证左右轮转弯时有相同特性,通过摇杆的转动带动车轮的等角度转动。
汽车构造第十二章汽车转向系
逆效率很低的转向器,称为不可逆式转向器。不平道路 对转向轮的冲击载荷输入到这种器,即由其中各传动零件(主要是传 动副)承受,而不会传到转向盘上。路面作用于转向轮上的回正力矩 同样也不能传到转向盘。这就使得转向轮自动回正成为不可能。此外, 道路的转向阻力距也不能反馈到转向盘,使得驾驶员不能得到路面反 馈信息(所谓丧失“路感”),无法据以调节转向力矩。
1.转向车轮的运动规律
转向中心:为避免在汽 车转向产生的路面对汽车行 驶的附加阻力和轮胎的快速 磨损,要求转向系能保证汽 车行驶时,所有车轮作纯滚 动,这时,只有所有车轮的 轴线交于一点才能实现,此 交点称为转向中心。 转弯半径:转向中心到 外转向轮与地面接触点的距 离称为转弯半径。
梯形转向机构 内侧车轮偏转角 大于外侧车轮偏 转角
12.1.1 转向系的类型
• 汽车转向机构分为机械转向和动力转向两种形式 。机械转向主要是由转向盘、转向器和转向传动机 构等组成,动力转向还包括动力系统。
• 机械转向是依靠驾驶员的手力转动转向盘,经转向器和 转向传动机构使转向轮偏转。 • 动力转向是在机械转向的基础上,加装动力系统,并借 助此系统来减轻驾驶员的手力。 • 动力转向包括液压式动力转向和电控式动力转向。 • 液压式动力转向已在汽车上广泛应用。近年来,电控动 力转向已得到较快发展。
为了减少转向螺杆和转向螺母之间的摩擦,两者之间的 螺纹以沿螺旋槽滚动的许多钢球5代之,以实现滑动摩擦变为 滚动摩擦。
转向螺杆转动时,通过钢球将力传给螺母, 螺母即沿轴 线移动。同时,在螺杆与螺母两者和钢球间的摩擦力偶作用 下,所有钢球便在螺旋管状通道内滚动,形成“球流”。 循环球式转向器的正传动效率很高(可达90%—95%), 故操纵轻便,使用寿命长,工作平稳、可靠。但其逆效率也 很高,容易将路面冲击力传到转向盘。不过,对于前轴轴载 质量不大而又经常在平坦路面上行驶的轻、中型载货汽车而 言,这一缺点影响不大。因此,循环球式转向器已广泛应用 于各类各级汽车。
汽车设计转向系设计说明书
课程______________ 汽车设计题目电动助力转向系设计说明书姓名 ___________________________________ 学号_______________________________班级____________________________指导教师 _______________________________ 日期2016年6月15日一、轿车转向系设计方案得选择.................................. -1 -1、轿车参数得确定............................................ -1 -2、对转向系得要求 (2)3、转向系结构设计............................................ -2 -1)转向操纵机构............................................ -2 -2)转向传动机构............................................ -3 -3)机械转向器.............................................. -3 -二、转向系统得主要性能参数.................................... -4 -1、转向系得效率 (4)11转向系得正效率........................................... -4 -2)............................................................................................. _转向系得逆效率-5 -2、转向系传动比得确定........................................ -5 -11转向系统传动比得组成..................................... -5 -2)_转向系统得力传动比与角传动比得关系....................... -5 -31传动系传动比得计算....................................... -6 -3、转向系传动副得啮合间隙 (7)11转向器得啮合特征......................................... -7 -2)_转向盘得自由行程 ........................................ - 8-4、齿轮齿条式转向器得设计与计算 (8)11转向轮侧偏角得计算....................................... -8 -2)_转向器参数得选取 ........................................ -9 -31选择齿轮齿条材料........................................ -10 -41轴承得选择.............................................. -10 -5、转向盘得转动得总圏数 (10)三、电动助力转向系统设计..................................... -10 -勺、转矩传感器................................................ -10 -2、减速机构.................................................... -10 -3、电饌离合器.................................................. -11 -4、电动机...................................................... -11 -iT车速传感器................................................. -11 -6、电子控制单元................................................ -11 -四、转向梯形机构得设计....................................... - 12 -1、转向梯形理论特性............................................ -12 -2、转向梯形得布置.............................................. -13 -3、转向梯形机构尺寸得初步确定.................................. -13 -4、梯形校核 (14)一. 轿车转向系设计方案得选择1.轿车参数得确定本次轿车转向系设计得整车相关参数如下:表1整车相关参数2.对转向系得要求1)汽车转弯行驶时,全部车轮应绕瞬时转向中心旋转;2)操纵轻便,作用于转向盘上得转向力小于200N;3)转向系得角传动比在15^20之间,正效率在60%以上,逆效率在50%以上;4)转向灵敏;5)转向器与转向传动机构中应有间隙调整机构;6)转向系应有能使鸳驶员免遭或减轻伤害得防伤装置3.转向系结构设计1)转向操纵机构转向操纵机构包括转向盘,转向轴,转向管柱。
汽车前轮转向原理
汽车前轮转向原理汽车前轮转向原理是指汽车在行驶过程中,通过转向系统使前轮产生转向运动,从而改变车辆的行驶方向。
汽车前轮转向原理是汽车操纵性能的重要组成部分,它直接影响着车辆的行驶稳定性和操控性。
下面将从转向系统的构成、工作原理和常见故障等方面对汽车前轮转向原理进行详细介绍。
一、转向系统的构成。
汽车转向系统主要由转向机构、转向传动机构和转向控制机构三部分组成。
1. 转向机构,转向机构是汽车前轮转向的关键部件,主要包括转向节、转向销、转向杆等。
转向机构通过操纵转向盘,使转向销转动,从而改变前轮的转向角度。
2. 转向传动机构,转向传动机构是将转向盘的转动传递给转向机构的重要组成部分,主要包括转向柱、传动齿轮等。
转向传动机构通过传动装置将转向盘的转动传递给转向机构,实现前轮的转向。
3. 转向控制机构,转向控制机构是控制转向系统工作的关键部件,主要包括转向阻尼器、转向助力器等。
转向控制机构通过阻尼和助力装置,提供转向系统的操纵性能和舒适性。
二、转向系统的工作原理。
汽车前轮转向的工作原理是通过转向机构、转向传动机构和转向控制机构协同作用实现的。
当驾驶员操纵转向盘时,转向盘的转动通过转向传动机构传递给转向机构,使转向机构产生转动,从而改变前轮的转向角度。
同时,转向控制机构通过阻尼和助力装置,提供操纵性能和舒适性,使驾驶员可以轻松操纵车辆的转向。
三、常见故障及解决方法。
1. 转向盘出现死区,当转向盘出现死区时,会导致车辆转向不灵活,甚至影响行车安全。
解决方法是检查转向机构和转向传动机构是否存在磨损或松动,及时进行维修和更换。
2. 转向助力失效,转向助力失效会导致驾驶员操纵转向盘时感到异常沉重,影响操控性能。
解决方法是检查转向助力器是否正常工作,如有故障及时进行维修和更换。
3. 转向系统异响,转向系统出现异响会影响驾驶舒适性,严重时会影响行车安全。
解决方法是检查转向机构和转向传动机构是否存在异物或磨损,及时进行清理和维修。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理与设计训练I ——汽车前轮转向机构说明书目录设计题目 (2)设计要求 (2)设计内容(原始数据) (3)第一题 (3)第二题 (3)思考题 (7)第三题 (9)第四题 (10)参考资料 (12)机构简介汽车的前轮转向,是通过等腰梯形机构ABCD 驱使前轮转动来实现。
其中,两前轮分别与两摇杆AB 、CD 相连,如下图所示。
当汽车沿直线行驶时(转弯半径R =∞),左右两轮轴线与机架AD 成一条直线;当汽车转弯时,要求左右两轮(或摇杆AB 与CD )转过不同的角度αβ、。
理论上希望前轮两轴延长线的交点P 始终能落在后轮轴的延长线上。
这样,整个车身就能绕P 点转动,使四个轮子都能与地面形成纯滚动,以减少轮胎的磨损。
因此,根据不同的转弯半径R (汽车转向行驶时,各车轮运行轨迹中最外侧车轮滚出的圆周半径),就要求左右两轮轴线(AB 、CD )分别转过不同的角度α和β,其关系如下:如图所示为汽车右拐时: tan /()L R d B β=-- , tan /()L R d α=- 所以α和β的函数关系为: cot cot /B L αβ-=同理,当汽车左拐时,由于对称性,有cot cot /B L βα-=,故转向机构ABCD 的设计应尽量满足以上转角要求。
二、设计要求设计数据见下表。
要求汽车沿直线行驶时,铰链四杆机构左右对称,以保证左右转弯时具有相同的特性。
该转向机构为等腰梯形双摇杆机构,设计此铰链四杆机构。
设计数据参数 轴距 轮距 最小转弯半径 销轴到车轮中心的距离符号 L B min R d单位 mm mm mm mm 型号 涂乐GRX 2900 1605 6100 400涂乐GL 2900 1555 6100 400尼桑公爵 2800 1500 5500 500现选择第二组数据进行解答1)根据转弯半径min R 和max R =∞(直线行驶),求出理论上要求的转角α和β的对应值。
要求最少2组对应值。
解: 当L=2900,B=1555,R min =6100,d=400时, 根据公式 tan /()L R d B β=-- tan /()L R d α=-解得:⎩⎨⎧=︒==︒=0.61rad34.9847rad.097.26min min βα当L=2900,B=1555,R ∞=9000,d=400时, 根据公式 tan /()L R d B β=-- tan /()L R d α=-解得:⎩⎨⎧=︒==︒=0.39rad 37.2233rad.063.1890009000βα2)用解析法设计铰链四杆机构ABCD ,满足以下条件:①最小转弯半径min R 所对应的α和 β满足P 点落在后轴延长线上的要求;②其他各组α和β尽可是能使P 点落在后轴延 长线上;③尽可能满足直线行驶时机构左右对称的附加要求。
解:1.利用公式求出当R 在[6100,9000]变化时的α与β值将R 区间平分成200份,求出200组α与β值数据表格:2.根据机构画图:得到公式:用已知的αmin 与βmin 值求出θ将杆长L 从100到500平分成200份,求出200组θ和θ2,根据此时的θ与L , 代入α9000,求出200组β,计算此时的β值与β9000的差值,找出最小差值,则该 值下的L 和θ构成的机构为最优机构。
α与β值随着R 的变化分组 R/m α/度β/度 分组 R/m α/度β/度 1 6.10 26.97 34.98 110 7.69 21.70 26.83 10 6.23 26.44 34.14 120 7.83 21.31 26.26 20 6.38 25.88 33.26 130 7.98 20.94 25.70 30 6.52 25.34 32.41 140 8.13 20.57 25.17 40 6.67 24.83 31.60 150 8.27 20.23 24.66 50 6.81 24.33 30.83 160 8.42 19.89 24.17 60 6.96 23.85 30.09 170 8.56 19.56 23.70 70 7.11 23.39 29.38 180 8.71 19.24 23.24 80 7.25 22.94 28.70 190 8.94 18.75 22.54 90 7.40 22.51 28.05 200 9.00 18.63 22.37 1007.5422.1027.43⎩⎨⎧+=+-=-+++)sin(sin )cos 2-B ()sin()cos()cos 2-(B cos )(cos 22αθθθβθβθθθαθl l l B l l l由图可清楚看出当L=0.1m 时有最优解,θ=68.63º=1.2rad利用最优解的条件,根据刚开始时α的200组取值,求出200组β‘ 角θ、β和Δβ随着L 值的变化分组 L/m θ/度 β/度 Δβ/rad分组L/m θ/度 β/度 Δβ/rad 1 0.1 68.63 22.13 0.0038 110 0.32 70.97 22.06 0.0050 10 0.12 68.85 22.12 0.0039 120 0.34 71.16 22.05 0.0052 20 0.14 69.07 22.12 0.0040 130 0.36 71.35 22.04 0.0053 30 0.16 69.30 22.11 0.0041 140 0.38 71.54 22.04 0.0054 40 0.18 69.52 22.10 0.0042 150 0.40 71.72 22.03 0.0055 50 0.20 69.73 22.10 0.0043 160 0.42 71.91 22.02 0.0057 60 0.22 69.95 22.09 0.0045 170 0.44 72.09 22.01 0.0058 70 0.24 70.16 22.08 0.0046 180 0.46 72.26 22.01 0.0059 80 0.26 70.36 22.08 0.0047 190 0.48 72.44 22.00 0.0060 90 0.28 70.57 22.07 0.0048 200 0.5 72.61 21.99 0.0062 1000.3070.77 22.06 0.0049作出β与β’角的比较曲线:βαβ’与Δβ’值随着α的变化分组 α/度 β/度 β’/度 Δβ’/度分组α/度 β/度β’/度 Δβ’/度1 26.97 34.98 34.94 0.03 110 21.70 26.83 26.16 0.67 10 26.44 34.14 33.98 0.16 120 21.31 26.26 25.58 0.68 20 25.88 33.26 32.98 0.28 130 20.94 25.70 25.02 0.68 30 25.34 32.41 32.04 0.37 140 20.57 25.17 24.49 0.68 40 24.83 31.60 31.15 0.45 150 20.23 24.66 23.98 0.68 50 24.33 30.83 30.32 0.51 160 19.89 24.17 23.49 0.68 60 23.85 30.09 29.53 0.56 170 19.56 23.70 23.02 0.67 70 23.39 29.38 28.79 0.60 180 19.24 23.24 22.57 0.67 80 22.94 28.70 28.08 0.62 190 18.75 22.54 22.14 0.66 90 22.51 28.05 27.41 0.65 200 18.63 22.37 21.72 0.65 100 22.10 27.43 26.77 0.66附:思考题:如果使机构精确满足R=Ri (≠Rmin )时的转角关系,该机构在其他转弯半径时的转角误差为多少?解:和第二题完全一样,假设Ri=7000,则经计算得⎩⎨⎧=︒==︒=0.52rad29.8941rad.072.2370007000βα在中,代入R=9000时的α值,得到200组β值,找出最优机构,计算β‘与Δβ’⎩⎨⎧+=+-=-+++)sin(sin )cos 2-B ()sin()cos()cos 2-(B cos )(cos 22αθθθβθβθθθαθl l l B l l l αβ当R=7000时β’与Δβ’值随着α的变化分组α/度β/度β’/度Δβ’/rad分组α/度β/度β’/度Δβ’/rad1 26.97 34.98 36.74 -0.0308 110 21.70 26.83 26.75 0.0014 10 26.44 34.14 35.57 -0.0248 120 21.31 26.26 26.13 0.0022 20 25.88 33.26 34.37 -0.0194 130 20.94 25.70 25.54 0.0029 30 25.34 32.41 33.27 -0.0151 140 20.57 25.17 24.97 0.0035 40 24.83 31.60 33.27 -0.0151 150 20.23 24.66 24.43 0.0040 50 24.33 30.83 31.32 -0.0085 160 19.89 24.17 23.91 0.0045 60 23.85 30.09 30.44 -0.0061 170 19.56 23.70 23.42 0.0048 70 23.39 29.38 29.61 -0.0040 180 19.24 23.24 22.95 0.0051 80 22.94 28.70 28.84 -0.0023 190 18.93 22.80 22.49 0.0053 90 22.51 28.05 28.10 -0.0009 200 18.63 22.37 22.06 0.0055 100 22.10 27.43 27.41 0.0003将β的两个实际值与理论值进行比较绘制曲线:由图易看出,并不是当Rmin 时所选出的机构为最优机构,当R=7000时,所得的 误差就比Rmin 的误差小3)用解析法检验这两种机构在常用转角范围30α≤时的最小传动角min γ。
解: 由图可知可推出γ=θ-β-θ2利用算出的最优机构l=0.1,θ=1.2rad ,α变化的200组数据算出200组γ值γ随着α值的变化分组 α/度γ/度 分组 α/度γ/度 1 26.97 32.75 110 21.70 39.25 10 26.44 33.53 120 21.31 39.63 20 25.88 34.32 130 20.94 39.98 30 25.34 35.05 140 20.57 40.30 40 24.83 35.72 150 20.23 40.61 50 24.33 36.34 160 19.89 40.89 6023.85 36.9217019.5641.1670 23.39 37.46 180 19.2441.41 80 22.94 37.95 190 18.93 41.64 90 22.51 38.42 200 18.63 41.85 100 22.10 38.85最小传动角γ=32.75º4)试设计一梯形机构使转角范围1030α≤≤时P 点尽可能落在后轴的延长线上。