ADAMS多体系统建模与动力学方程迭代求解
基于ADAMS的悬架系统动力学仿真分析与优化设计
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
msc adams多体动力学仿真基础与实例解析

MSC Adams是一种常用的多体动力学仿真软件,它可以用于研究和分析机械系统、运动学和动力学特性。
下面简要介绍MSC Adams的基础知识和实例解析:
1. 多体动力学基础:
-刚体和连接:MSC Adams使用刚体模型来表示物体,可以定义物体的质量、惯性矩阵和几何形状。
通过连接件(约束)将多个物体连接在一起,可以模拟各种机构系统。
-动力学模型:通过定义物体的受力和力矩,可以建立动力学模型。
这些力可以包括重力、摩擦力、弹簧力等,可以根据需要进行自定义。
-运动学分析:可以分析物体的位置、速度、加速度以及各个连接件之间的相对运动关系。
2. 实例解析:
-车辆悬挂系统:通过建立车辆悬挂系统的多体动力学模型,可以分析车轮与地面的接触力、悬挂系统的行程和动态响应等。
这有助于改善车辆的悬挂性能和乘坐舒适性。
-机械臂运动学和动力学分析:通过建立机械臂的多体动力学模型,可以分析机械臂在不同工作状态下的位姿、速度和加速度。
这有助于优化机械臂的设计和运动控制算法。
-飞机起落架系统:通过建立飞机起落架系统的多体动力学模型,
可以分析起落架在着陆和起飞时的动态响应和受力情况。
这有助于改进起落架的设计和耐久性。
-振动系统:通过建立振动系统的多体动力学模型,可以分析系统的固有频率、振动模态和受力情况。
这有助于评估结构的稳定性和设计适当的减振措施。
以上是MSC Adams多体动力学仿真的基础知识和一些实例解析。
通过使用MSC Adams,工程师和研究人员可以更好地理解和优化复杂机械系统的动力学特性。
adams动力学仿真原理
adams动力学仿真原理
Adams是一种基于动力学原理进行仿真的软件,它使用多体
动力学理论和计算力学算法,对系统中的物体进行建模和仿真,以模拟真实的物体运动和相互作用。
Adams的仿真原理主要基于以下几个方面:
1. 多体动力学:Adams使用多体动力学理论来描述系统中的
物体运动。
多体动力学是物体受力和受力作用导致的加速度之间的关系。
通过建立质点、刚体或弹性体等物体的动力学模型,并考虑物体之间的相互作用,可以求解物体的运动轨迹、速度和加速度等。
2. 约束条件:Adams支持对系统中物体之间的各种约束条件
进行建模和仿真。
约束条件可以是几何约束,如固定连接、旋转关节、滑动关节等,也可以是物理约束,如弹簧、阻尼器等。
Adams利用这些约束条件来限制物体的运动范围,并求解约
束条件下的系统运动。
3. 接触和碰撞:Adams还考虑了系统中物体之间的接触和碰撞。
通过建立接触模型和碰撞模型,Adams可以模拟物体之
间的接触力和碰撞力,并根据物体的质量、形状和速度等参数计算物体的反应。
4. 动力学求解:Adams使用高效的动力学求解算法,通过求
解物体运动的微分方程组,得到物体的运动轨迹、速度和加速度等。
求解过程中,Adams考虑了物体之间的相互作用和约
束条件,并根据物体的质量、惯性、摩擦力等参数计算物体的运动状态。
总的来说,Adams的仿真原理基于多体动力学理论和计算力学算法,并考虑了物体之间的约束、接触和碰撞等相互作用,以模拟系统中物体的真实运动和行为。
ADAMS动力学求解算法特性比较分析_吴冰
2 求解器的特点比较
(1)Gstiff求解器。Gstiff求解器为刚性稳定算法,采用多步、 变阶(最高阶为6)、变步长、固定系数算法。可直接求解DAE方 程,有I3、SI2、SI1三种积分格式。在预估中采用泰勒级数,而且 其系数是假设步长不变而得到的固定系数,因而当步长改变时会产 生误差。其奇特点是计算速度快,位移精度高,I3格式时速度、尤 其加速度会产生误差,可以通过控制最大步长来控制求解中步长的
学术研讨
2011年第9期 24
ADAMS动力学求解算法特性比较分析
吴 冰 ①② 陈 波 ②
(①河南理工大学 ②新乡学院)
摘 要 本文简要介绍了美国MDI(Mechnical Dynamics Inc.)虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems),总结了ADAMS中的动力学求解算法,对不同的算法特性进行了对比分析。给出了不同算法的适用范围。
关键词 DAE方程 积分格式 求解器
虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的 商用软件,由美国MDI(Mechnical Dynamics Inc.)开发,在经历了 12个版本后,被美国MSC公司收购。ADAMS集建模、计算和后处 理 于 一 体 , A DAMS有许 多 个 模 块 组 成 , 基 本 模 块 是 View模 块 和 Postprocess模块,通常的机械系统都可以用这两个模块来完成。另 外,在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌 入 模 块 , 例 如 专 业 模 块 包 括 汽 车 模 块 ADAMS/Car、 发 动 机 模 块 ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft 等 ; 嵌 入 模 块 如 振 动 模 块 ADAMS/Vibration、 耐 久 性 模 块 ADAMS/Durability、 液 压 模 块 ADAMS/Hydraulic、 控 制 模 块 ADAMS/Control和柔性体模块ADAMS/AutoFlex等。本文对ADAMS 中的动力学求解算法进行了介绍,然后对不同的算法特性进行了对 比分析。
ADAMS 2023动力学分析与仿真从入门到精通

ADAMS 2023动力学分析与仿真从入门到精通简介ADAMS(Advanced Dynamic Analysis of Mechanical Systems)是一种用于进行动力学分析和仿真的强大工具。
它可以帮助工程师和设计师在产品开发过程中预测和优化机械系统的性能。
无论是汽车、飞机还是机械设备,ADAMS都可以用来模拟其在不同工况下的动态行为。
本文档将介绍ADAMS 2023的基本概念和操作指南,从入门到精通,帮助读者快速上手并掌握ADAMS的使用方法。
1. ADAMS简介1.1 ADAMS的定义ADAMS是一种基于多体动力学理论的仿真软件,它能够对复杂的机械系统进行动力学分析和仿真,并提供详细的结果和可视化的模拟效果。
它主要用于评估系统的运动性能、力学特性和振动响应,是工程师进行设计优化和故障排查的重要工具。
1.2 ADAMS的应用领域ADAMS广泛应用于汽车、航空航天、机械设备等领域,用于模拟和分析复杂机械系统的动态行为。
例如,汽车制造商可以使用ADAMS来评估车辆的悬挂系统、转向动力学和车身振动特性;航空航天公司可以使用ADAMS来模拟飞机的飞行动力学和振动响应。
2. ADAMS基本概念2.1 多体系统ADAMS将机械系统建模为多个刚体之间的约束系统。
每个刚体包含了几何特征、质量和惯性属性。
通过在刚体之间添加约束和运动条件,可以建立复杂的多体系统模型。
2.2 约束约束用于描述刚体之间的相对运动关系。
ADAMS提供了各种类型的约束,如平面、关节、铰链等。
通过正确定义约束条件,可以模拟系统的运动和力学特性。
2.3 运动条件运动条件用于描述系统的运动。
ADAMS提供了多种运动模式,如位移、速度、加速度和力矩等。
通过在刚体上施加运动条件,可以模拟系统的各种运动情况。
3. ADAMS操作指南3.1 ADAMS界面ADAMS的用户界面由多个工具栏、菜单和窗口组成。
主要包括模型浏览器、属性编辑器、运动学模块、仿真控制和结果查看器等。
多体动力学仿真软件 ADAMS 理论及应用研讨

∑a y
i i= 1
n - i+ 1
]
( 6)
将式 ( 2) 在 t= tn+ 1 时刻展开, 得:
© 1995-2003 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
第5期
张越今等: 多体动力学仿真软件 ADAM S 理论及应用研讨
{q i } c , c 表示校正值。 ( 4) 确立相关坐标。 确定独立坐标的校5) 积分误差控制。 与上面预估2校正算法积分误差控制过程相同。
© 1995-2003 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
第16卷 第5期 1997年 9月
机械科学与技术 M ECHAN ICAL SC IEN CE AND T ECHNOLO GY
Vol . 16 N o. 5 Sep 1997
Ξ
理论研究
多体动力学仿真软件 ADAM S 理论 及应用研讨3
张越今
张越今 宋 健
( 清华大学 北京 100084)
摘 要 系统地阐述了机械系统自动动力仿真软件 ADAM S 的理论基础和求解 方法。 并结合建模工作, 探讨了其应用方法和规律。 关键词 多体动力学 机械系统仿真 ADAM S 软件 中图号 T P391. 9
( 3)
在进行动力学分析时, ADAM S 采用下列两种算法: ( 1) 提供三种功能强大的变阶、 变步长积分求解程序: GST IFF 积分器, D ST IFF 积分器 和 BD F 积分器来求解稀疏耦合的非线性微分代数方程, 这种方法适于模拟刚性系统 ( 特征值 变化范围大的系统) 。 ( 2) 提供 ABAM (A dam s2 B a shfo rth and A dam s2 M ou lton ) 积分求解程序, 采用坐标分离 算法, 来求解独立坐标的微分方程。 这种方法适于模拟特征值经历突变的系统或高频系统。 1. 3. 1 微分2代数方程的求解算法 用 Gea r 预估2校正算法可以有效地求解式 ( 2) 所示的微分2代数方程。 首先, 根据当前时刻 的系统状态矢量值, 用 T ay lo r 级数预估下一个时刻系统的状态矢量值。 2 2 2 y n + 1 = y n + ( 5y n 5t) h + ( 1 2! ) ( 5 y n 5t ) h + …
基于ADAMS的连杆机构多体动力学仿真研究

·34 6·
工 程 设 计 学 报
第 12 卷
表 2 连杆质心位置的极限变形( X= 50 r/ s) T able 2 L imit defo rmat ion o f po sitio n of mass po int
( X= 50 r / s)
质心
X
Y
Z
位置 min
max m in max
随着现代机械系统朝着高速、重载、高精度方向 发展, 设计者越来越重视构件的动应力和产品的寿 命预估[ 1] , 使得系统刚性运动与其自身变形之间相 耦合而产生的弹性动力学问题已成为该领域急需解 决的普遍问题和关键技术.
在研究连杆机构系统动力学时, 高速运转的连 杆的柔性对于系统动力学特性的影响不能被忽略. 本文在对多体动力学理论研究的基础上, 将连杆视 为柔性体, 利用动力学软件 ADAM S 和有限元软件 ANSYS 间数据双向接 口 F LEX, 先在 ADAM S 中 对曲柄-滑块多体系统进行动力学仿真, 分析柔性体 对多体系统特性的影响, 然后将计算结果以载荷步 文件返回到 ANSYS 中, 对连杆运动过程中的动态
模型:
¨
·
M N+ K N+ CqK= Q + F( N, N, K)
( 5)
C( q, t) = 0
式( 5) 中 M , K 表示机械质量和刚度矩阵; Q 表示外
力; F 表 示速 度 二次 项; Cq 表 示系 统约 束方 程 的
J acob i矩 阵 ;
K表示
L ag
rang
e
乘子;
N,
·
N,
x
y
x
z
N= 7 = 7
adams动力学方程
adams动力学方程Adams动力学方程是一种用于描述物体运动的数学模型。
它是以约翰·克劳福德·亚当斯(John Crawford Adams)的名字命名的,他是一位英国工程师和数学家。
Adams动力学方程在多个领域,包括机械工程、物理学和航天航空等领域中得到了广泛应用。
Adams动力学方程是通过对物体的运动进行建模,以预测物体的位置、速度和加速度随时间的变化。
它基于牛顿的第二定律,即力等于质量乘以加速度。
根据这个定律,可以得到物体的运动方程。
Adams动力学方程的一般形式为:F = ma在这个方程中,F代表物体所受的合力,m代表物体的质量,a代表物体的加速度。
根据这个方程,可以计算物体在任意时刻的加速度。
Adams动力学方程可以用于解决多种不同类型的问题。
例如,在机械工程中,可以使用Adams动力学方程来分析机械系统的运动。
通过对系统中每个部件的质量、惯性和受力进行建模,可以预测系统在不同工况下的运动状态。
在物理学中,Adams动力学方程也有广泛的应用。
例如,可以使用它来研究天体运动、分析粒子在电磁场中的行为等。
通过对不同力的作用进行建模,可以推导出物体在不同条件下的运动规律。
航天航空领域也是Adams动力学方程的重要应用领域之一。
在航天器的设计和控制中,Adams动力学方程可以用来预测航天器在不同姿态和推力条件下的运动轨迹。
这对于保证航天器的运行稳定性和精确性非常重要。
除了上述领域,Adams动力学方程还可以应用于其他许多领域。
例如,可以用它来研究机器人的运动控制、分析汽车的悬挂系统、优化工业流程等。
Adams动力学方程是一种强大的数学工具,可以用于描述物体的运动。
它在多个领域中得到了广泛应用,能够帮助工程师和科学家解决各种实际问题。
通过对物体的质量、力和加速度进行建模,Adams 动力学方程可以提供详细的运动预测和分析,为实际应用提供了重要的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文 章 编 号 : 1006 - 1576 ( 2004 ) 02 - 0049 - 03
辅 子 系 统 协调条件 主子系统由 ADAMS 建 模并求解 协调条件 辅 子 系 统
图2
一个简单刚柔耦合系统
图 1
复杂多体系统的主辅子系统
求解过程为:在每一个动力学仿真的积分时 刻 , 由 ADAMS 计 算 出 各 分 割 面 上 的 位 移 、 速 度 和 加速度,将这些位移、速度和加速度代入辅子系统
1 a/m.s- 2 0.9 0.8 0.7
j= 1
&j = − ω 2 && τ ∑ d ij& i τ i − c ix
N
力 Fx 由 一 个 用 户 子 程 序 计 算 , 在 该 子 程 序 中 , & & 通 过 调 用 ADAMS 的 状 态 变 量 获 取 子 程 序 给 出 , x & j ( j = 1L N ) , 代 入 (3) 式 得 到 F x 。 Fx 代 入 (4) 式 得 到 & τ
・ 49・
兵工自动化 测控技术 O. I. Automation 2004 年第 23 卷第 2 期 Measurement and Control Technique 2004, Vol. 23, No.2
辅子系统。两子系统在分割面处的 协调条件是:位 移、速度、加速度相等,作用力(矩)等大反向, 由 此 可 得 到 两 子 系 统 的 动 力 学 方 程 [1] 。
&,再 作 用 在 刚 体 A 上 , ADAMS 又 给 出 一 个 新 的 & x 按 上 述 步 骤 迭 代 , 直 到 ADAMS 求 解 器 的 校 正 算 法 收敛。
0
0.1 t/ s
0.2
图 4
1
ADAMS 迭 代 算 出 的 刚 体 A 的 加 速 度
a/m.s- 2
3.3 迭 代 求 解 要 注 意 的 问 题 (1) 由 于 迭 代 法 是 在 同 一 积 分 时 刻 进 行 的 , 因 此 应 确 保 ADAMS 的 积 分 仿 真 时 刻 与 外 界 程 序 的 积 分 时 刻 必 须 保 持 一 致 , 即 ADAMS 求 解 器 从 t i 时 刻 到 t i+ 1 时 刻 预 估 一 次 , 外 界 程 序 从 t i 到 t i+ 1 积 分 一 次 , 当 ADAMS 校 正 器 从 t i 到 t i+ 1 校 正 时 , 外 界 程 序 必 须 从 ADAMS 的 状 态 变 量 获 取 子 程 序 取 出 所 用 的 变 量 后 , 从 t i 到 t i+ 1 重 新 积 分 。 当 ADAMS 预 估 校 正 结束,开始下一时刻的预估校正过程时,外界程序 保留下上面最后一次校正的结果,进入下一时刻的 积分。 (2) 当 ADAMS 校 正 器 失 效 时 , ADAMS 求 解 器放弃该步积分结果,倒退到上一积分时刻,缩小
Modeling of Multi- System and Iteration Solving of Dynamic Equations Basing on ADAMS
MA Ji-sheng (No.1 Department, Ordnance Engineering College, Shijiazhuang 050003, China)
3
应用示例
2
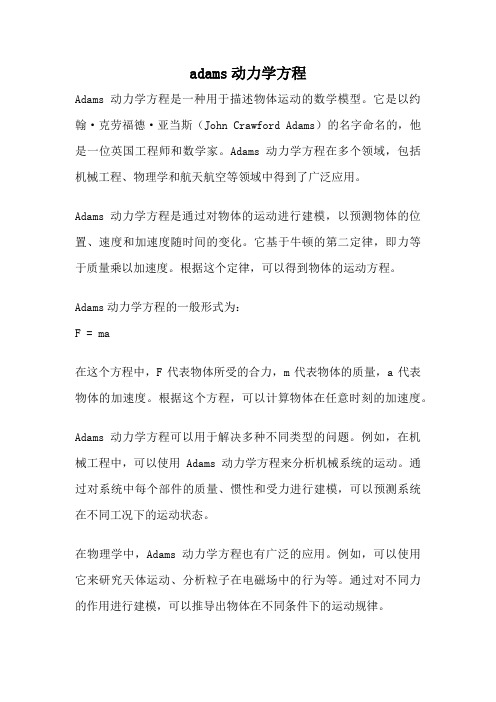
复杂多体系统的建模与求解思路
3.1 示 例 模 型
B F A
对于复杂的多体系统,可根据结构特征人为分 割成一个主子系统和若干辅子系统,主子系统用 ADAMS 建 模 并 求 解 , 辅 子 系 统 由 用 户 自 编 程 序 建 模并求解,通过分割面上的位移、速度、加速度相 等,力(力矩)的大小相等方向相反的协调条件使 各辅子系统与主子系统发生联系,如图 1 所示。
ADAMS 多 体 系 统 建 模 与 动 力 学 方 程 迭 代 求 解
马吉胜 (军械工程学院 一系,河北 石家庄 0 5 0 0 0 3 ) 摘 要 : 基 于 ADAMS 的 复 杂 多 体 系 统 建 模 与 动 力 学 方 程 的 迭 代 求 解 , 是 将 复 杂 多 体 系 统 分 割 为 一 个 主 子 系 统 和 若 干 辅 子 系 统 。 主 子 系 统 用 ADAMS 建 模 并 求 解 。 辅 子 系 统 由 用 户 自 编 外 部 程 序 建 模 并 求 解 。 依 据 位 移 、 速 度 、 加 速 度 的 协 调 条 件 , 使 主 、 辅 子 系 统 发 生 联 系 , 利 用 ADAMS 求 解 器 嵌 含 的 迭 代 过 程 , 实 施 整 个 系 统 的 迭 代 求 解 。 关 键 词 : 多 体 系 统 建 模 ; 动 力 学 方 程 ; 迭 代 法 ; ADAMS 中 图 分 类 号 : TP391.9; O39; TB122 文献标识码:A
动力学子程序,计算出分割面上的作用力和作用力 矩,然后将这些作用力和作用力矩做为反作用施加 到主子系统上,计算主子系统在同一积分时刻的各 分割面上的位移、速度和加速度,如此反复迭代, 直到满足收敛条件。此辅子系统的动力学分析子程 序 是 做 为 ADAMS 主 模 型 中 用 于 计 算 作 用 力 的 子 程 序出现的,因此辅子系统的动力学模型就被嵌入到 ADAMS 主 模 型 中 , 体 现 了 系 统 的 整 体 求 解 。
1
引言
美 国 MDI 公 司 ADAMS 机 械 系 统 动 力 学 仿 真 软件,可方便快速建立机械系统地动力学模型,直 观清晰展示机械系统的动力学分析结果。但在处理 弹性变形的多柔体系统动力学等问题时,存在数值 求解的困难,其中运动生成器设计的运动学控制函 数只能是时间的函数,螺旋副约束的间距只能是均 匀 的 。 基 于 此 , 提 出 了 一 种 基 于 ADAMS 软 件 的 复 杂多体系统的建模与动力学问题的迭代求解思想。
收 稿 日 期 : 2003 - 10 - 22 ; 修 回 日 期 : 2004 - 01 - 15 作 者 简 介 : 马 吉 胜 ( 1967- ) , 男 ,河 北 人 , 博 士 ,军 械 工 程 学 院 教 授 ,1994 年 毕 业 于 南 京 理 工 大 学 ,从 事 多 体 系 统 动 力 学 、 振 动 信 号 处 理 、 模式识别与神经网络研究。
积分步长,再行预估校正,这时外界积分程序也必 须倒退到上一积分时刻,重新进行积分。 (3) 外 界 程 序 的 积 分 步 长 必 须 与 ADAMS 的 积 分步长完全一致。为了避免在外界程序中计算 ADAMS 的 积 分 步 长 的 麻 烦 , 可 在 ADAMS 的 求 解 器设置中,将初始积分步长、最大积分步长和外界 程 序 的 积 分 步 长 设 成 一 样 , ADAMS 的 最 小 积 分 步 长 可 稍 小 , 这 样 ADAMS 基 本 上 是 按 定 步 长 积 分 。 要注意的是,取相同值的三个积分步长要足够小, 以 保 证 外 界 程 序 和 ADAMS 的 求 解 器 均 能 收 敛 。 3.4 计 算 结 果
z Fx F x F
&& = F − Fx Mx && Fx M 0 c1 L cN x && 2 τ 1 − ω1 τ1 c 1 d 11 L d1N = M M O M M M 2 &N τ c N d N1 Ld NN − ω τ & N N
(2)
L L 其 中 M 0 = ∫0 ρ dz 是 梁 的 质 量 , c i = ∫0 ρTi dz , L d ij = ∫0 ρ Ti Tjdz , i,j= 1 … N, Ti 是 悬 臂 梁 的 第 i 阶 正
则 模 态 在 x 方 向 的 分 量 ,ω i 是 悬 臂 梁 的 第 i 阶 固 有 圆频率,N 是所截取的模态数。 3.2 迭 代 求 解 过 程 在 ADAMS 中 建 立 刚 体 A 的 动 力 学 模 型 , A受 已 知 力 F 和 未 知 力 F x 作 用 , 由 式 (2) 可 得
Abstract: The modeling of multi-system and iteration solving of dynamic equation is that a complicated multi-system is divided into one host subsystem and some secondary subsystems. Host subsystem is modeled and solved with ADAMS, and secondary subsystem is modeled and solved by user subroutine. According to some conditions of displacement, velocity and acceleration, forces are used to link host and seconda ry subsystems. Whole iteration solving of system is realized with involved iteration process in ADAMS solver. Key words: Multi-system modeling; Dynamic equation; Iteration method; ADAMS
图 2 为一个简单刚柔耦合系统,A 为一刚体, 置于光滑的水平面上, 其上固接的体 B 是一悬臂梁, 其 轴 线 在 梁 未 变 形 时 与 光 滑 平 面 垂 直 。刚 体 A 的 质 量 为 M, 悬 臂 梁 B 的 各 参 数 如 下 : 梁 长 L , 横 截 面 积 为 S, 截 面 惯 性 矩 为 I , 弹 性 模 量 为 E , 线 密 度 为 ρ ,刚体 A 受 到 水 平 推 力 F 作 用 , 可 沿 光 滑 平 面 做 直线运动。将系统在连接处切开,得到图 3 所示的 两个子系统,其中刚体 A 是主子系统,悬臂梁 B 是