第4章根轨迹分析法参考答案
第四章 习题及参考答案.doc

解⑴G(s)= 第四章线性系统的根轨迹法4-3单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ G3)= s(0.2s + l)(0.5s +1)K 10Ks(0.2s + l)(0.5s +1) = s(s + 5)(s + 2)系统有三个开环极点:0 =0,P2 =-2,,3 =-5 实轴上的根轨迹:[—2,0]炊、己心0-2-5 7 (2k +1)71;■勿①渐近线:——= 一牙仁= -------;-- =±^,石%1分离点:j + £? + £ = °解得:%= 一°・88,d2 - 3.7863 (舍)%1与虚轴的交点:特征方程为D(s)= s 3 + 7s 2 + 10s + 10K = 0 J Re[D(jd))] = -7a)2 + 10K = 0 \(o = V10令[Im[D(ja))] = -a)3 + 10fi? = 0 解得[K = 7与虚轴的交点(0, +710j)o根轨迹如图解4-3 (1)所示。
图4-3 (1)K*(s + 2)⑴ G(s) =⑴(s + i + 〃)(s + l 一以)解:①实轴上的根轨迹:(-00-2]1 1 1②分离点:d + 1 + j2+ d + l-j2 = d + 2解之得:=-4.23③起始角:° PI = 180。
+ 63.435 -90 =153.43°,另一起始角由对称性得:-153.43°。
图4-4 (1)4-5已知单位反馈系统的开环传递函数G(s),要求:(2)确定G(s)= “EK::、、产生纯虚根为±顶1的z值和K*值S十_LV八S 十)解(2)闭环特征方程:D(s) = $2 (s + 10)(s + 20) + K* (s + z)=s4 + 30s3 + 200s2 + K*s + K*Z = 0有:D(j(o) = 3 一200妒 + K*Z)+ - 30切3)=0刃4 -200妒+矿々=0令实、虚部分别等于零即:如•勿-30妒=0把刃=1 代入得:K*=30, z = 199/30。
第四章 根轨迹法 习题
第四章 根轨迹法4-1试粗略画出对应反馈控制系统具有以下前向和反馈传递函数的根轨迹图: ()()()()s s H s s s K s G 6.01,01.01.02+=++=4-2 试粗略地画出反馈系统函数 ()()()()2411+-+=s s s Ks G 的根轨迹。
4-3 对应负反馈控制系统,其前向和反馈传递函数为 ()()()()1,42)1(2=+++=s H s s s s K s G 试粗略地画出系统的根轨迹。
4-4 对应正反馈重做习题4-3,试问从你的结果中得出什么结论?4-5 试画出具有以下前向和反馈传递函数的,正反馈系统根轨迹的粗略图。
()()()()1,4122=++=s H s s Ks G4-6 试确定反馈系统开环传递函数为 ()()()()()5284)2(2+++++=s s s s s s K s H s G 对应-∞<K<∞的根轨迹。
指明所有根轨迹上的相应特征。
4-7 设一负反馈系统,其开环传递函数 ()()()()()90020040)4(2++++=s s s s s K s H s G a) 画出根轨迹并表明根轨迹上全部特征值。
b) 增益值在一个什么样的范围内,系统才是稳定的? c) 画出系统的伯德图,并使其稳定性和不稳定性区域,与根轨迹图连系起来说明。
4-8 对应负反馈情况,重做习题4-7.4-9 对应如下的负反馈控制系统,粗略地作出根轨迹,并确定系统稳定下K 的范围。
()()()()1,41)6(=+++=s H s s s s K s G4-10 对应习题4-10图所示系统,根据以下条件,试确定导致系统稳定的正实数增益K 的范围:a) 具有负反馈的系统。
b) 具有正反馈的系统。
习题4-10图4-11 已知反馈系统的开环传递函数*()()(1)(2)K G s H s s s s =++ 试绘制系统的根轨迹图,详细列写根轨迹的计算过程,其中包括零点、极点、渐近线及与实轴交点,根轨迹分离点及与虚轴的交点、渐近线与实轴夹角。
孙炳达版 《自动控制原理》第4章 控制系统的根轨迹分析法-5
R(s)
s 1
k s 2 (s 2)
Y(s)
j
j
σ
-1/τ
σ
4.5 系统性能的根轨迹分析
系统开环传递函数:
Gk ( s) Kg s( s 2)(s 3)
Þ ¿ Î ª » ·Á ã µ ã
j¦ Ø 2 -3 -2 -1 0 ¦ Ò -2
增加零点-z
Gk ( s) K g (s z) s( s 2)(s 3)
4.5 系统性能的根轨迹分析
例 系统的结构图如下,
R(s)
K
s 2 2 s 5 ( s 2 )( s 0.5 )
Y(s)
要求: 1)用根轨迹法确定使系统稳定的K的取值范围; 2)用根轨迹法确定系统的阶跃响应不出现超调 量的K的最大值。
4.5 系统性能的根轨迹分析
解 由已知条件画出根轨迹如图, 其中根轨迹与虚轴的交点 分别为0和1.254j,对应的开环 增益K分别为0.2和0.75。 分离点为d=-0.409。 所以,系统稳定K的取值范围为:0.2<K<0.75 不出现超调量的K最大值出现在分离点处d=-0.409 处。将d代入 D( s ) ( s 2)(s 0.5)
由根轨迹图可测得该对主导极点为:
s1, 2 b jn n j 1 2 n 0.35 j 0.61
由根轨迹方程的幅值条件,可求得A、B两点:
Kg OA CA DA 2.3
根据闭环极点和的关系可求得另一闭环系统极 点s3=-4.3,它将不会使系统超调量增大,故取 Kg=2.3可满足要求。
4.5 系统性能的根轨迹分析
将零点z1<-10,系统根轨迹为 系统根轨迹仍有两条始 终位于S平面右半部, 系统仍无法稳定。
第四章 根轨迹分析法 2

4. 牛顿余数定理
(1)求出表达式 Ps D(s)N(s) N(s)D(s)
(2)分析根轨迹,估计在其分离点(或会合点)可能出现的实轴 坐标附件找一个试探点 s1。
(3)用 s s1 去除 Ps ,得出商多项式 Qs 及余数,该余数记
为 R1 ;
(4)再用 s s1 去除商多项式 Qs,得第二个余数,定义为 R2 ;
s2 3
k gp
s1 6-kgp 3
s0 kgp
令 6-kgp 3
0 kgp
6
由辅助方程求交点坐标:
3s2 Hale Waihona Puke 6 0s1,2 2 j
法则10 闭环极点的和与积
若n-m>=2,则有
n
n
(sj ) ( pj ) const
j1
j1
证明:
开环传递函数:
m
根轨迹的入射角:终止于开环零点的根轨迹在终点出的切线同正 实轴的夹角。
j
[s]
p1 p1 z1
z1
0 z2
z2 p2 p2
m
n
先求出射角: (s zi ) (s pj ) 180o (2k 1)
i 1
j 1
• s1 →-p1则 0, (s1 pa ) a
1802k 1 (180 arctan1) arctan 1 90 71.6
j
2
p4 p3 71.6
7) 根轨迹同虚轴的交点:
-p3
1.1j
p3
j
特征方程 s4 5s3 8s2 6s kg 0
令s j
-p2 s1
-3
第四章 根轨迹分析习题参考答案

-2j
-3j
4-11 绘出多项式方程的根轨迹 ① s3 2s2 3s Ks 2K 0
解: G(s) K (s 2) K (s 2)
K (s 2)
s3 2s 2 3s s(s 2 2s 3) s(s 1 j 2)(s 1 j 2)
①开环极点:P1=0,P2 1 j 2 开环零点:z1=-2 三条根轨迹
②实轴上根轨迹 (-∞,-3.5),[-1,0]
③渐近线交点、夹角
a
1 3.5 3 2 j 5
32j
2.1
a
(2k 1)
5
36
108
180
渐近线与虚轴的交点: a 2.1tan 36 1.5
④分离点,在[-1,0]之间存在分离点 特征方程:1 G(s) 0
s(s 1)(s 3.5)(s 2 6s 13) K * 0
1
180
渐近线为负实轴
④出射角:
4j
p1
180
arc tan 4 2
90
90
63.4
153.4
3j
p2 -153 .4
2j
⑤分离点:
1j
1 G1(s) s 2 4s 20 b(s 4) 0
-4 -3 -2 -1 -1j
b s 2 4s 20
-2j
(s 4)
-3j
db (2s 4)(s 4) (s2 4s 20) s2 8s 4
0
-4j
ds
(s 4)2
(s 4)2
- 8.4 b1,2 4 2 5 4 4.4 0.(4 舍)
153.4°
4j 3j 2j 1j
-9 -8 -7 -6 -5 -4 -3 -2 -1 -1j -2j -3j -4j
第4章 根轨迹分析法 参考答案
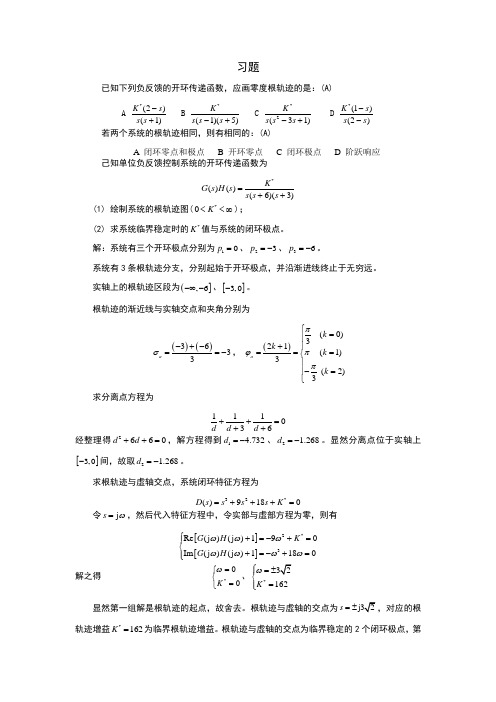
习题已知下列负反馈的开环传递函数,应画零度根轨迹的是:(A)A *(2)(1)K s s s -+B *(1)(5)K s s s -+C *2(31)K s s s -+ D *(1)(2)K s s s --若两个系统的根轨迹相同,则有相同的:(A)A 闭环零点和极点B 开环零点C 闭环极点D 阶跃响应己知单位负反馈控制系统的开环传递函数为*()()(6)(3)K G s H s s s s =++ (1) 绘制系统的根轨迹图(*0K <<∞);(2) 求系统临界稳定时的*K 值与系统的闭环极点。
解:系统有三个开环极点分别为10p =、23p =-、36p =-。
系统有3条根轨迹分支,分别起始于开环极点,并沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],6-∞-、[]3,0-。
根轨迹的渐近线与实轴交点和夹角分别为()()36 33a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩求分离点方程为111036d d d ++=++ 经整理得2660d d ++=,解方程得到1 4.732d =-、2 1.268d =-。
显然分离点位于实轴上[]3,0-间,故取2 1.268d =-。
求根轨迹与虚轴交点,系统闭环特征方程为32*()9180D s s s s K =+++=令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )190Im (j )(j )1180G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解之得 *00K ω=⎧⎨=⎩、*162K ω⎧=±⎪⎨=⎪⎩显然第一组解是根轨迹的起点,故舍去。
根轨迹与虚轴的交点为s =±,对应的根轨迹增益*162K =为临界根轨迹增益。
根轨迹与虚轴的交点为临界稳定的2个闭环极点,第三个闭环极点可由根之和法则求得1233036λλλλ--=++=+解之得39λ=-。
4第四章__根轨迹法(2)
2
1
Imag Axis
0
-1
-2
-3 -2
-1.5
-1
-0.5 Real Axis
0
0.5
1
第四章 线性系统的根轨迹分析
2)确定内环的闭环极点 要求内环的反馈系数 内环的特征方程 3.2<Kf<3.5
( s 0.6)(s2 2s 4) K f 0
在实轴上选取试验点进行试探,P1=-1.6时,Kf =3.36 可求得内环的另外两个闭环极点为 p2 0.5 j1.83 p3 0.5 j1.83 3)绘制外环的根轨迹图 外环的开环传递函数
(2)根轨迹的起点 (3)实轴上的根轨迹
0,-1,-3
终点 均为∞
[0 , ] [3 , 1]
第四章 线性系统的根轨迹分析
(4)根轨迹的渐近线
a
n
2k 180 0 ,120 nm
m j i 1 i
k 0、 1
a=
( p ) ( z )
i 1 j与虚轴的交点 (相同) (9)闭环极点的和 (相同)
第四章 线性系统的根轨迹分析
例:控制系统方框图如下所示
R(s )
Kc s2
K0 s( s 1)
C (s )
1 s3
系统的内环为正反馈,绘制内环根轨迹图。 解: (1)内环的开环传递函数
G1 ( s ) H1 ( s ) K0 s( s 1)(s 3)
第四章 线性系统的根轨迹分析
4-3
广义根轨迹
其它种类的根轨迹: 1.参数根轨迹
2.多回路系统的根轨迹 3.正反馈回路和零度根轨迹
自动控制原理简明教程 第四章 根轨迹法 习题答案
方程求得。
k* 2 3 3
2
1
2 3 2 2 3 1
解得: k* 3(3 3)
1 3
特征根s=0处对应的 k * 值也利用模值方程求得:
k* 3 2 2 1
1
k*
4 3
满足稳定性时,k* 4 要使系统的三个根均为负
实根,则:
3
k* 4 3
0 k* 3(3 3) 1 3
0 k*
另一个闭环极点为 S3 ,则
(S S3 )(S 1)2 S (S 3)2 4
则解得:
(S S3 )(S 1)2 S (S 1)2 4(S 1)2 (S 4)(S 1)2
则 (S S3) S 4 S3 4 (另外一个闭环极点) 临界阻尼时的闭环传递函数为
(S)
(S
4(S 1) 4)(S 1)2
(2
j) (2 3
j)
4 3
渐近线与实轴正方向夹角
a
(2k 1)
nm
,
3
分离点: 1 1 1 0
d d 2 j d 2 j
整理得:3d 2 8d 5 0
解得:d1,2
8 6
2
d1 1 d2 1.67
分离角
l
180 l
180 2
900
把 S j 代入特征方程:
1
k*
n
m
a
i 1
Pi Zi
i 1
nm
(3) (3) 3
2
渐近线与实轴正方向夹角:
a
(2k 1)
nm
, ,
33
分离点: 1 1 1 0
d d 3 d 3
解得:d 1, a S (S 3)2 (1) 4 4
《自动控制原理》第4章_根轨迹分析法
因此求分离点和会合点公式: 可以判断是分离点或
N(s)D '(s) N '(s)D(s) 0 会合点,只有满足条
Kg 0
件Kg≥0的是有用解。
例4-1.设系统结构如图, 试绘制其概略根轨迹。
R(s)
k(s 1) c(s)
s(s 2)(s 3)
解:画出 s 平面上的开环零点(-1),开环极点(0, -2,-3)。
逆时针为正。(- , )
m
n
pj (2k 1) ( z j pi ) pj pi
j 1
j 1
ji
m
n
zi (2k 1) ( z j zi ) p j zi
j 1
j 1
j i
k 0,1,
k 0, 1,
例3.设系统开环传递函数为: G(s) Kg(s 1.5)(s 2 j)(s 2 j) s(s 2.5)(s 0.5 j1.5)(s 0.5 j1.5)
K
s1
00
0.5 1
1 1 j1
s2
K
K 2.5
2
K 1
1 K 0
1 j1
2 1
2 1 j 3 1 j 3
1 j 1 j
j
2
1
0
K 0.5
1
2
一、根轨迹的一般概念
开环系统(传递函数)的某一个参数从零变化到 无穷大时,闭环系统特征方程根在 s 平面上的轨迹 称为根轨迹。
根轨迹法:图解法求根轨迹。 借助开环传递函数来求闭环系统根轨迹。
nm
独立的渐近线只有(n-m)条 u=0,1…,(n-m-1)
(2)渐近线与实轴的交点
分子除以分母
第4章 根轨迹分析法 参考答案
习题4.1 已知下列负反馈的开环传递函数,应画零度根轨迹的是:(A)A *(2)(1)K s s s -+B *(1)(5)K s s s -+C *2(31)K s s s -+D *(1)(2)K s s s --4.2 若两个系统的根轨迹相同,则有相同的:(A)A 闭环零点和极点B 开环零点C 闭环极点D 阶跃响应4.3 己知单位负反馈控制系统的开环传递函数为*()()(6)(3)K G s H s s s s =++(1) 绘制系统的根轨迹图(*0K <<∞);(2) 求系统临界稳定时的*K 值与系统的闭环极点。
解:系统有三个开环极点分别为10p =、23p =-、36p =-。
系统有3条根轨迹分支,分别起始于开环极点,并沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],6-∞-、[]3,0-。
根轨迹的渐近线与实轴交点和夹角分别为()()36 33a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩求分离点方程为111036d d d ++=++ 经整理得2660d d ++=,解方程得到1 4.732d =-、2 1.268d =-。
显然分离点位于实轴上[]3,0-间,故取2 1.268d =-。
求根轨迹与虚轴交点,系统闭环特征方程为32*()9180D s s s s K =+++=令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )190Im (j )(j )1180G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解之得 *00K ω=⎧⎨=⎩、*162K ω⎧=±⎪⎨=⎪⎩显然第一组解是根轨迹的起点,故舍去。
根轨迹与虚轴的交点为s =±,对应的根轨迹增益*162K =为临界根轨迹增益。
根轨迹与虚轴的交点为临界稳定的2个闭环极点,第三个闭环极点可由根之和法则求得1233036λλλλ--=++=+解之得39λ=-。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题4.1 已知下列负反馈的开环传递函数,应画零度根轨迹的是:(A)A *(2)(1)K s s s -+B *(1)(5)K s s s -+C *2(31)K s s s -+D *(1)(2)K s s s --4.2 若两个系统的根轨迹相同,则有相同的:(A)A 闭环零点和极点B 开环零点C 闭环极点D 阶跃响应4.3 己知单位负反馈控制系统的开环传递函数为*()()(6)(3)K G s H s s s s =++ (1) 绘制系统的根轨迹图(*0K <<∞);(2) 求系统临界稳定时的*K 值与系统的闭环极点。
解:系统有三个开环极点分别为10p =、23p =-、36p =-。
系统有3条根轨迹分支,分别起始于开环极点,并沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],6-∞-、[]3,0-。
根轨迹的渐近线与实轴交点和夹角分别为()()36 33a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩求分离点方程为111036d d d ++=++ 经整理得2660d d ++=,解方程得到1 4.732d =-、2 1.268d =-。
显然分离点位于实轴上[]3,0-间,故取2 1.268d =-。
求根轨迹与虚轴交点,系统闭环特征方程为32*()9180D s s s s K =+++=令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )190Im (j )(j )1180G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解之得 *00K ω=⎧⎨=⎩、*162K ω⎧=±⎪⎨=⎪⎩显然第一组解是根轨迹的起点,故舍去。
根轨迹与虚轴的交点为s =±,对应的根轨迹增益*162K =为临界根轨迹增益。
根轨迹与虚轴的交点为临界稳定的2个闭环极点,第三个闭环极点可由根之和法则求得1233036λλλλ--=++=+解之得39λ=-。
即当*162K =时,闭环系统的3个特征根分别为1λ=、2λ=-39λ=-。
系统根轨迹如图4.1所示。
图4.1 题4.3所示系统根轨迹图4.4 系统结构如下图所示绘制系统的根轨迹(0K <<∞),并确定系统欠阻尼状态下的K 值。
解:系统闭环传递函数为 ()()()2929()99299122s s s Ks s s Ks s s s s φ+==+++++++。
特征方程为22990s s Ks +++=。
等效开环传递函数为 29()()29KsG s H s ss =++。
系统有2条根轨迹分支,起始于开环极点1,21p =-±,1条终止于开环零点0z =,另一条沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],0-∞。
根轨迹的渐近线与实轴交点和夹角分别为((11 21aσ-++--==-,()21 0,2ak ϕπ+== 实轴上分离点方程为22909d s s ds Ks ⎛⎫++= ⎪⎝⎭。
解方程得到13d =-、23d =(弃去),对应49K =。
根轨迹与虚轴在有限围无交点,根轨迹如图4.2所示。
图4.2 题4.4所示系统根轨迹图由根轨迹可知当409K <<时,系统有两个闭环极点,为欠阻尼响应。
4.5 已知负反馈控制系统的闭环特征方程为*2(14)(22)0K s s s ++++= (1) 绘制系统的根轨迹(*0K <<∞);(2) 确定使复数闭环主导极点的阻尼系数0.5ζ=的*K 值。
解:系统开环传递函数为*2()()(14)(22)K G s H s s s s =+++开环极点为114p =-、2,31j p =-±。
实轴上根轨迹区段为(],14-∞-。
根轨迹的渐近线与实轴交点和夹角分别为()()()1411 5.33a j j σ-+--+--==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩实轴上分离点方程为11101411d d j d j++=++++-,解之得9.63d =-。
求与虚轴交点,闭环特征方程为*2()(14)(22)D S K s s s =++++。
令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )116280Im (j )(j )1300G H K G H ωωωωωωω⎧+=-++=⎪⎨+=-+=⎪⎩,解得 * 5.4438.6K ω=±⎧⎨=⎩。
因cos 0.5β=,故60β=︒,作过原点与负实轴夹角为60±︒的直线,在s 上半平面交P 、Q 两点,如图4.3所示。
P 点坐标为0.94j 1.62s =-+,则对应*0.94j1.62(14)(0.94j 1.62)(0.94j 1.62)21.61s s s s K =-+++-++==图4.3 题4.5所示系统根轨迹图4.6 已知单位反馈系统的开环传递函数为*()()(1)(1)2.56K G s H s s s s =++(1) 绘出K 由0→∞变化时系统的根轨迹 (根轨迹的分离点、渐近线、与虚轴交点的数值要求精确算出)。
(2) 用根轨迹法分析:能否通过调整K 使系统的阶跃响应超调量%25%σ<,为什么? (3) 能否通过调整K 使系统的静态误差系数15K ≥,为什么?解:系统开环传递函数为*()()(1)(1)2.56K G s H s s s s =++化成根轨迹形式为*()()( 2.5)(6)K G s H s s s s =++,其中*15K K =。
(1) 开环极点为10p =、2 2.5p =-、26p =-。
实轴上根轨迹区段为[]2.5,0-、(],6-∞-。
根轨迹的渐近线与实轴交点和夹角分别为()()2.56 2.833a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩实轴上分离点方程为1112.56d d d +=++,解出1 1.1d =-、2 4.56d =-(弃去)。
求与虚轴交点,闭环特征方程为*()( 2.5)(6)D S K s s s =+++令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )18.50Im (j )(j )1150G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解得 * 3.87127.5K ω=±⎧⎨=⎩。
做出根轨迹如图4.4所示。
图4.4 题4.6所示系统根轨迹图(2) 当%25%eσ-=<时,即0.403ζ>,或cos66.2arβζ<<︒。
作过原点与负实轴夹角为66.2±︒的直线,与根轨迹有交点为P、Q两点,如图 3.35所示。
P点坐标为0.8j1.7s=-+,使用幅值条件计算此点对应的*K,即*8j1.7( 2.5)(6)24.6sK s s s=-+=++=*15 1.64K K=÷=(3) 从根轨迹曲线可知,当*127.5K≥即8.54K≥,系统是不稳定的,故无法通过调整K使系统的静态误差系数15K≥。
4.7 应用根轨迹法确定下图所示系统在阶跃信号作用下无超调响应的K值围。
解:系统开环传递函数为(0.251)()()(0.51)K sG s H ss s+=+,化成根轨迹形式为*(4)()()(2)K sG s H ss s+=+,其中*0.5K K=。
系统开环极点为1p=、22p=-,开环零点为4z=-。
实轴上根轨迹区段为[]2,0-、(],4-∞-。
渐近线与实轴的夹角为()2121akπϕπ+==-实轴上分离点方程为11124d d d+=++,解出11.172d=-、26.828d=-,根轨迹如图4.5所示。
图4.5 题4.7所示系统根轨迹图系统无超调即特征根全部为负实数,从根轨迹图中看出,分离点1 1.172d =-与会和点2 6.828d =-为临界点,需求出此两点所对应的K 值。
系统的特征方程为20.5(10.25)0s K s K +++=分别将1 1.172s d ==-、2 6.828s d ==-代入上式可解得10.686K =、223.31K =。
由此求得系统无超调响应的K 值围是00.686K ≤≤、23.31K ≤≤+∞4.8 设正反馈系统的开环传递函数为2(2)()()(3)(22)K s G s H s s s s +=+++ 画出K 变化时系统的根轨迹.解:开环极点为1,21p j =-±、33p =-,开环零点为2z =-。
实轴上根轨迹区段为[)2,-∞、(],3-∞-。
渐近线与实轴的夹角为 20,31a k πϕπ==- 实轴上分离点方程为()()232202s s s d ds s ⎡⎤+++⎢⎥=+⎢⎥⎣⎦,解出10.8d =-、2,3 2.35j0.77d =-±。
其中10.8d =-是根轨迹上的分离点。
出射角方程为()()()11112130 =0459027 =72p z p p p p θ=︒+∠--∠--∠-︒+︒-︒-︒-︒272θ=︒1d 处的分离角方程为()()11113112=(200)22d k d z d s k θππ⎡⎤=+∠--∠-+︒-︒⎣⎦当10,0d k θ==︒;当11,d k θπ==,即1d 处的分离角为0︒、π。
1d 处的会合角方程为()()()()()11112131112121 =21002d k d p d p d s k ϕππαα⎡⎤=++∠-+∠--∠-⎣⎦++-+︒-︒⎡⎤⎣⎦当10,2d k πϕ==;当11,2d k πϕ==-,即1d 处的会合角为2π±。
根轨迹与虚轴交点为0ω=,根轨迹如图4.5所示。
图4.6 题4.8所示系统根轨迹图4.9 设单位反馈系统的开环传递函数为10(1)()(0.51)(1)s G s s Ts -=++ 画出T 变化时系统的根轨迹。
解:系统的特征方程为(0.51)(1)10(1)0s Ts s +++-=。
对上式变换为(0.51)9.5110Ts s s +-+=。
等效闭环传递函数为 *(2)()1119.5T s s s s ϕ+=--。
等效开环传递函数为*(2)()()119.5T s s G s H s s +=-,其中*29.5TT =⨯。
可知该系统根轨迹应使用0︒根轨迹绘制方法。
渐近线与实轴的夹角为 212a k πϕ=-,解之得 0,a ϕπ=。