QSC24ENANO可编程控制舵机板使用说明要点
树莓派舵机扩展板 Servo Driver HAT 用户手册

Servo Driver HAT用户手册前言本产品是基于树莓派而设计的PWM/舵机扩展板,通过PCA9685芯片扩展16路舵机控制或者PWM输出,每个通道12位分辨率。
通过I2C接口控制,无需占用额外的引脚。
板载5V稳压芯片,可接电池供电,最大输出3A电流。
适用于控制机械手臂,以及各种舵机机器人。
产品特性输入电压VIN:6V~12V舵机电压:5V逻辑电压:3.3V驱动芯片:PCA9685控制接口:I2C产品尺寸:65mm x 30mm固定孔通径:3.0mm硬件说明板子可以从树莓派上取电不需要额外供电。
也可以通过右边绿色端子VIN接电池供电,输入电压范围6V~12V。
经过板载的5V稳压芯片输出5V电源给舵机和树莓派供电,最大输出电流3A。
A0~A4可以设置PCA9685芯片的I2C设备地址,可以同时接多个Servo Driver HAT最上面的排针是舵机接口,黑色排针是GND(大部分舵机对应的是褐色线), 红色排针是5V电源,黄色排针是PWM信号线,有0~15个通道,可以同时接16个舵机。
注意舵机线不要接反,否则舵机不会转动。
注意:如果接大功率的舵机可能会出现供电不足的现象,需要接更多的电源使用指南开启I2C接口执行如下命令进行树莓派配置:sudo raspi-config选择Interfacing Options -> I2C ->yes 启动i2C内核驱动注意:运行程序后有提示I2C错误,可以运行如下命令打开配置文件sudo nano /etc/modules如果没有这两行语句则添加上去,并保存退出。
i2c-devi2c-bcm2708运行程序我们提供python2和python3的示例程序,功能包括简单的PCA9685库测试程序,wifi遥控程序以及蓝牙遥控程序。
其中wifi和蓝牙遥控发送端是通过手机APP发送指令,需要安装对应的APP(只支持安卓) 手机下载相应的APP并安装。
QSC24E(NANO)可编程控制舵机板使用说明

舵机板上位机软件使用说明参考QSC32E使用说明这里详解ARDUINO-NANO配合舵机板QSC24E-NANO来解码PS2并使用手柄按键的功能,以及ARDUINO对舵机板接口通讯说明。
此功能仅QSC24E-NANO可用此舵机板套件分别为3块PCB组成,最左边为24路带过载保护的舵机控制板,(专门处理多路舵机控制)。
中间为ARDUINO-NANO编程控制板,PRO-MINI 为编程控制主板(专门负责处理数据编程)使用,最右边为的串口调试板(可给舵机板调试也可给ARDUINO-NANO下载程序)。
此舵机板,他上面可直接插PS2手柄的接收器,其解码是通过ARDUINO-NANO 来完成的。
L1:舵机供电电源指示灯L2:通讯指示灯,随着主板接收外部信号L2跟着同步闪动L3:舵机板状态显示灯。
此舵机板带有电压检测功能,当VSS主板电压低于6.8V (默认为7.4V锂电池供电),或者舵机(+-)电压低于5.5V(默认为7.4V锂电池接入1.3V降压二极管),此时L3灭掉,并伴随喇叭报警。
提示电池电压不足用户需要给电池充电1.驱动的安装:插上CP2102串口设备的USB线,并安装驱动,驱动为ARDUINO-QSC24E(CP2102)驱动对应不同的操作系统选择不同的驱动文件安装,这里注意,如果驱动没有安装时候CP2102串口设备的红色指示灯不会亮,只有正确安装好驱动后,CP2102串口板上的红色指示灯才点亮。
CP2102串口设备使用6P线连接下面的舵机板,连线为BLK---BLK,GRN---GRN.即通过上位机软件Q-robot_Servo_Control调试机器人舵机CP2102串口设备使用6P线连接上面的ARDUINO编程板,连线为BLK---BLK,GRN---GRN.即通过编程软件软件arduino下载机器人主程序。
2.主板的供电VSS表示主板供电正极电压,供电电压为6.5V-12V。
默认为7.4V+表示舵机供电正极电压,供电电压为5.5V-8V。
黄石科威24V新型EC、EP说明书
AI6+、AI6-:6#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 AI7+、AI7-:7#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 AI8+、AI8-:8#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 AI9+、AI9-:9#通道模拟量输入端子,接热电偶、标准信号、PT100 信号。 CANH、CANL:CAN 网络接口端子。 A、B : RS485 网络端子 A+、B-,固化 CAN 网络配置、组建 RS485 网络。固化 CAN 网络配置时要另配 485/232 转换器。 RS0:编程口,为 232 接口,配专用通讯电缆,下载程序、与人机界面连接。 拨码开关:运行控制端子,拨动拨码开关,可编程控制器处于 RUN 或 STOP 状态。
壁挂式垂直安装
4
★ 接地方式 专用接地(最好) 共用接地(可) 公共接地(不可)
1.2 外形结构尺寸
产品型号
L(mm) 产品型号
L(mm)
EC/P-08M08R-24 100
EP-10H-24
100
EC/P-08M08T-24 100
EP-32M-24
140
EP-10E-24
100
EP-32T-24
使用注意事项
● 可编程控制器的安装位置尽量远离高电压、强电流、高频率等对周围有较强干扰的设备。 ● 请一定在可编程控制器外部组成紧急停电电路,制止正反动作同时进行的连锁电路、上下限定位连锁电路。 ● EC/EP 系列可编程控制器指令集有 86 条指令,如果程序中含有超出这 86 条指令范围的指令,可编程控制器运行时会出错。 ● 在下载梯形图或固化 CANSET 时,下载完毕后,将拨码开关拨到 RUN,等可编程控制器运行后,才能断电,否则,程序得不到固化。 ● 对于变更运行中的程序、强制输出、RUN、STOP 等操作,必须熟读使用手册,充分确认其安全之后进行。
QSC24E(NANO)可编程控制舵机板使用说明要点

舵机板上位机软件使用说明参考QSC32E使用说明这里详解ARDUINO-NANO配合舵机板QSC24E-NANO来解码PS2并使用手柄按键的功能,以及ARDUINO对舵机板接口通讯说明。
此功能仅QSC24E-NANO可用此舵机板套件分别为3块PCB组成,最左边为24路带过载保护的舵机控制板,(专门处理多路舵机控制)。
中间为ARDUINO-NANO编程控制板,PRO-MINI 为编程控制主板(专门负责处理数据编程)使用,最右边为的串口调试板(可给舵机板调试也可给ARDUINO-NANO下载程序)。
此舵机板,他上面可直接插PS2手柄的接收器,其解码是通过ARDUINO-NANO 来完成的。
L1:舵机供电电源指示灯L2:通讯指示灯,随着主板接收外部信号L2跟着同步闪动L3:舵机板状态显示灯。
此舵机板带有电压检测功能,当VSS主板电压低于6.8V (默认为7.4V锂电池供电),或者舵机(+-)电压低于5.5V(默认为7.4V锂电池接入1.3V降压二极管),此时L3灭掉,并伴随喇叭报警。
提示电池电压不足用户需要给电池充电1.驱动的安装:插上CP2102串口设备的USB线,并安装驱动,驱动为ARDUINO-QSC24E(CP2102)驱动对应不同的操作系统选择不同的驱动文件安装,这里注意,如果驱动没有安装时候CP2102串口设备的红色指示灯不会亮,只有正确安装好驱动后,CP2102串口板上的红色指示灯才点亮。
机软件Q-robot_Servo_Control调试机器人舵机即通过编程软件软件arduino下载机器人主程序。
2.主板的供电VSS表示主板供电正极电压,供电电压为6.5V-12V。
默认为7.4V+表示舵机供电正极电压,供电电压为5.5V-8V。
默认为7.4-1.3V(即7.4V锂电池接一次降压快)注意以上如果不是默认电压。
主板的低压报警喇叭在电池电压过低的时候不会发生报警。
默认的供电连线如图所示。
3.PS2手柄连线、外接拨动开关的连线。
舵机控制板使用说明
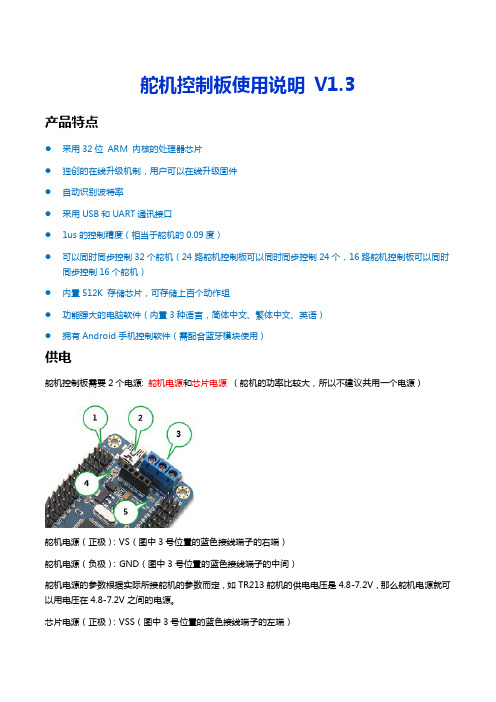
舵机控制板使用说明V1.3产品特点●采用32位ARM 内核的处理器芯片●独创的在线升级机制,用户可以在线升级固件●自动识别波特率●采用USB和UART通讯接口●1us的控制精度(相当于舵机的0.09度)●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时同步控制16个舵机)●内置512K 存储芯片,可存储上百个动作组●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语)●拥有Android手机控制软件(需配合蓝牙模块使用)供电舵机控制板需要2个电源: 舵机电源和芯片电源(舵机的功率比较大,所以不建议共用一个电源)舵机电源(正极):VS(图中3号位置的蓝色接线端子的右端)舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间)舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。
芯片电源(正极):VSS(图中3号位置的蓝色接线端子的左端)芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间)VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。
另外:1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。
2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必须是5V。
3. 1234. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表示芯片供电异常。
5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表示舵机供电异常。
2安装驱动驱动下载地址:/down/usc_driver.exe (全部是小写)直接双击usc_driver.exe ,点击下一步即可安装驱动。
四轴可编程控制器说明书(含圆弧直线实现方式)

四轴可编程控制器说明书(含圆弧直线实现方式)珩源电子科技 一、 功能与接线描述1、可控制xy两轴电机配合走直线插补和圆弧插补;2、可控制4路步进电机同时工作,工作频率每路100KHZ(最高达150KHZ):特别注意的是对应盒子上的标注,DR1为X轴的方向控制脚,DR2为Y轴的方向控制脚,DR3为Z轴的方向控制脚,DR4为C轴的方向控制脚; CP1为X轴的脉冲控制脚,CP2为Y轴的脉冲控制脚,CP3为Z轴的脉冲控制脚,CP4为C 轴的信号控制脚。
与驱动器接的时候,以X轴为例,把驱动器公开端(控制盒子上标注的5V输出脚)接你方驱动器的CP+\DR+;用控制器的CP1接控制器的CP-,用控制器的DR1接你方驱动器的DR-。
这种接法叫单端接法。
如下图一所示。
3、5路继电器输出(常开触点、内部加了RC去弧电路),7路OC输出(控制外部24V继电器或电磁阀)特别注意:对应文本上设定Y1-7表示控制7路OC;Y8-12对应本控制器的5路继电器输出。
如下图一所示。
4、13路光耦隔离输入(每路外部接到地表示接通):盒子上标为YL1-YL13,分别对应输入X1-X13(在文本上设定):特别说明的是对应外部的输入信号,平时悬空或为24V(控制器工作的输入电源24V),当外部输入信号为电源24V的地的时候表示这个输入口有效。
经常外接开关按钮,或光电反馈开关,接触开关反馈信号等。
如下图一所示。
5、通过串口与外部文本进行通信功能6、可存储10个工程,每个工程可以设置50步二、编程界面和说明1、运行主界面X\Y\Z\C 四轴的运行参数进行实时显示,单位是MM。
参数对应按键,进入相应的设定界面。
测试对应按键,进入相应的测试界面。
启动对应按键,对应启动当前的工程进行运行。
停止对应按键,将停止当前运行的工程,不管当前运行工程到哪一步。
当“启动”时将重新按工程的第一步开始运行。
量产是对应工程的运行次数,假定工程运行一次,加 1.可以按“SET”键进行设定数字,比如清“0”。
机械手舵机的用法及程序

舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。
适用于那些需要角度不断变化并可以保持的控制系统。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
一般舵机旋转的角度范围是0°到180°度。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms之间,但是,事实上脉宽可由0.5ms到2.5ms之间,脉宽和舵机的转角0°~180°相对应。
有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
大概了解了舵机以后,我们就试着来控制一个舵机吧,将GND和+5V连接好之后,我选择信号输入口为数字接口7,至于供电部分要注意,舵机转动时电流会比较大,连接好电路就来编写程序吧,我就让舵机转动到我输入数字所对应的角度数,并将角度显示到屏幕上。
程序如下:int servopin=7;//定义舵机接口数字接口7int myangle;//定义角度变量int pulsewidth;//定义脉宽变量int val;void servopulse(int servopin,int myangle)//定义一个脉冲函数{pulsewidth=(myangle*11)+500;//将角度转化为500-2480的脉宽值digitalWrite(servopin,HIGH);//将舵机接口电平至高delayMicroseconds(pulsewidth);//延时脉宽值的微秒数digitalWrite(servopin,LOW);//将舵机接口电平至低delay(20-pulsewidth/1000);}void setup(){pinMode(servopin,OUTPUT);//设定舵机接口为输出接口Serial.begin(9600);//连接到串行端口,波特率为9600Serial.println("servu=o_seral_simple ready" ) ;}void loop()//将0到9的数转化为0到180角度,并让LED闪烁相应数的次数{val=Serial.read();//读取串行端口的值if(val>'0'&&val<='9'){val=val-'0';//将特征量转化为数值变量val=val*(180/9);//将数字转化为角度Serial.print("moving servo to ");Serial.print(val,DEC);Serial.println();for(int i=0;i<=50;i++)//给予舵机足够的时间让它转到指定角度{servopulse(servopin,val);//引用脉冲函数}}}下载完程序就可以输入1到9的数字,让你的舵机转相应的20°到180°了。
飞鸿24路舵机控制器使用说明书

FH24路舵机控制器使用说明书飞鸿科技2012-5-24一、产品介绍 (2)二、接口说明 (3)三、指令说明 (4)1、波特率识别指令 (4)2、舵机移动指令 (5)3、动作组指令 (5)4、脱机运行 (6)四、24路舵机调试软件使用说明 (6)二、连接PC上位机 (8)三、上位机界面编辑 (9)四、单路舵机调试 (11)五、动作组编辑 (11)六、下载调试窗口 (12)五、无线通信 (13)一、蓝牙遥控 (14)1、硬件连接 (14)2、蓝牙设置 (14)二、红外遥控 (18)1、硬件连接 (18)2、应用举例 (18)六、注意事项及故障解决 (19)一、产品介绍1、使用32位ARM芯片,运行速度快,控制精度高。
2、多达24路独立的舵机控制通道,满足大部分用户需求3、512K动作存储,轻松实现脱机运行。
4、1us的位置控制精度,支持命令控制,速度控制(做机器人应选择能进行速度控制的控制器)5、自动识别波特率,方便使用在各种场合。
6、3.8*4.8cm的尺寸。
体积小,重量轻,便于集成到各种人型机器人、仿生机器人、多自由度机械手中。
7、具有联机、脱机、蓝牙无线控制、红外无线控制四种工作模式。
联机模式下,可以通过上位机或单片机进行控制;脱机模式下,自动运行预先通过上位机烧写好的动作,板载512K动作存储器;还可以用蓝牙或者红外遥控器无线控制。
8、控制接口:miniUSB,只需一根usb线即可方便的用电脑给机器人编辑动作,控制机器人运行。
配套的无线通信模块支持蓝牙、红外遥控器控制。
配套的功能强大的PC上位机软件,支持界面编辑,舵机角度编辑,全速/单步调试,动作保存、动作下载、脱机运行设置。
这一切只需动动鼠标,没有任何基础也能搞定。
二、接口说明1、MiNiUSB:可以用来供电,也可以用来通信。
只需用本产品赠送的usb线将控制器与电脑的usb口连接起来就可以控制舵机转动。
2、控制电源接口:给单片机等控制电路供电,如果使用USB供电,此处可不接电源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
QSC24ENANO可编程控制舵机板使用说明要点
1.引言(100字):
2.特性(200字):
QSC24ENANO支持最多24个舵机,每个舵机都有独立的PWM输出。
它采用高性能的STM32F030C8T6单片机,内置四通道驱动芯片,可直接驱动舵机,无需其他设备。
该板还支持通过I2C总线进行网络扩展,可同时驱动多块扩展板。
3.连接方法(200字):
首先,将QSC24ENANO插入主控制器的GPIO引脚,并连接电源。
接下来,将舵机的信号线插入QSC24ENANO的相应引脚上,确保舵机的电源线和地线与QSC24ENANO相连接。
最后,连接其他扩展板或外设,如传感器或显示屏。
4.控制方式(300字):
可以通过多种方式控制QSC24ENANO,包括手动控制、编程控制和远程控制。
手动控制可以通过按钮、滑块或旋钮等输入设备实现。
编程控制可以使用C、C++、Python等语言编写程序,通过串口或无线模块将程序加载到主控制器上。
远程控制可以使用红外遥控器或无线控制器等遥控设备,通过无线通讯方式与QSC24ENANO通信。
5.编程方法(400字):
QSC24ENANO可通过多种编程方法进行控制。
首先,可以使用官方提供的库函数进行编程,该库函数提供了丰富的API接口,方便用户进行开发和控制。
其次,支持通过Arduino IDE进行编程,用户可以选择适合自
己的开发环境和编程语言。
此外,还可以使用ROS(机器人操作系统)进行编程,ROS提供了强大的工具和库,方便用户进行机器人控制和协作开发。
在编程过程中,用户可以根据实际需求对舵机进行控制。
可以控制舵机的位置、速度和加速度等参数,还可以进行运动轨迹规划和复杂动作序列控制。
用户还可以通过编程实现舵机的同步运动、互动控制和多舵机协同等功能。
6.实例应用(200字):
QSC24ENANO可广泛应用于机器人、航模和其他遥控应用。
在机器人领域,可以用于控制机器人的关节和执行器,实现机器人的运动和动作。
在航模领域,可以用于控制飞机、直升机和无人机等的舵机,实现精确操控和飞行控制。
在其他遥控应用中,可以用于控制车辆、船只、摄像云台等设备,实现远程操控和平稳运动。
总结(100字):
通过本文的介绍,您应该了解到QSC24ENANO可编程控制舵机板的特性、连接方法、控制方式和编程方法等要点。
它具有丰富的功能和灵活的应用,适用于各种机器人、航模和遥控应用。
希望本文对您使用
QSC24ENANO有所帮助,祝您开发顺利!。