控制工程基础-第五章
控制工程基础-第五章
2012年1月3日3时7分
σ
0
A
600
1800
-4 -3 -2 -1
σ
600
C
14
3000
2012年1月3日3时7分
15
根轨迹的分离点、 规则六 根轨迹的分离点、会(汇)合点
K1 = 0
K1 = ∞
K1 = ∞
K1 = ∞
K1 = 0
K1 = 0
会合点
K1 = 0
jω
kg = 1
P2
Kg →∞
kg = 0
σ
性能
4
2012年1月3日3时7分
二、根轨迹与系统性能
当增益K1 K1由 根轨迹不会越过虚轴进入s 稳定性 当增益K1由0→∞ ,根轨迹不会越过虚轴进入s平面右半 因此系统对所有的值都是稳定的。 边,因此系统对所有的值都是稳定的。如果系统特征方程的根 都位于s平面的左半部,系统是稳定的,否则是不稳定的。 都位于s平面的左半部,系统是稳定的,否则是不稳定的。若根 轨迹穿越虚轴进入右半s平面,根轨迹与虚轴交点处的K 轨迹穿越虚轴进入右半s平面,根轨迹与虚轴交点处的K值,就是 临界稳定的开环增益。 临界稳定的开环增益。 开环系统在坐标原点有一个极点,所以属Ⅰ型系统, 稳态性能 开环系统在坐标原点有一个极点,所以属Ⅰ型系统, 因而根轨迹上的K值就是静态速度误差系数。 因而根轨迹上的K值就是静态速度误差系数。如果给定系统的 稳态误差要求,则由根轨迹图确定闭极点位置的允许范围。 稳态误差要求,则由根轨迹图确定闭极点位置的允许范围。 所有闭环极点均位于实轴上,系统为过 动态性能 当0 < kg <1 时, 所有闭环极点均位于实轴上,系统为过 阻尼系统 其单位阶跃响应为单调上升的非周期过程。 系统, 阻尼系统,其单位阶跃响应为单调上升的非周期过程。 特征方程的两个相等负实根,系统为临界阻尼 当 kg = 1 时,特征方程的两个相等负实根,系统为临界阻尼 系统,单位阶跃响应为响应速度最快的非周期过程。 系统,单位阶跃响应为响应速度最快的非周期过程。 特征方程为一对共轭复根系统为欠阻尼系统 欠阻尼系统, 当 kg > 1 时,特征方程为一对共轭复根系统为欠阻尼系统, 单位阶跃响应为阻尼振荡过程, 单位阶跃响应为阻尼振荡过程,振荡幅度或超调量随Kg值的 增加而加大,但调节时间不会有显著变化。 增加而加大,但调节时间不会有显著变化。
《控制工程基础》5.1

当给定ω,G(jω)是复平面上的一矢量。
幅值:A(ω) = | G(jω)| 相角(与正实轴的夹角,逆时针为正):φ(ω) = ∠G(jω)
实部:U(ω) = A(ω)cosφ(ω)
虚部:V(ω) = A(ω)sinφ(ω) ω从0 → ∞ 时,G(jω)端点的轨迹:频率特性的极坐标图。
第 5 章
5.2 频率特性的Nyquist图
2 2 2 2
实频:
虚频: 幅频: 相频:
U ( )
K (1 T 1 T 2 )
2
(1 T 1 )( 1 T 2 )
2 2 2 2 2
V ( )
K (T1 T 2 )
(1 T 1 )( 1 T 2 )
2 2 2 2
第 5 章
G ( j )
典型环节的Nyquist图
1.比例环节
传递函数:
G (s) K
频率特性: G ( j ) K 幅频: 相频:
G ( j ) K
G ( j ) 0
U ( ) K V ( ) 0
实频:
虚频:
第 5 章
5.2 频率特性的Nyquist图
典型环节的Nyquist图
2 2 2 2
2 幅频: G (→ ∞ 实频: V ( ) 当ω从0 j ) 时,即λ从0 → ∞ ,振荡环节的Nyquist图就是始于点(1, 2 2 2 2 2 2 2 2
1
j0),而终于点(0,j0)。曲线与虚轴的交点的频率就是无阻尼固有频 2 1 2 相频: G ( j ) arctan 虚频: U ( ) 率ωn,此时的幅值为1/(2ξ)。振荡环节的阻尼比ξ取值不同,其Nyquist
控制工程基础 (第12讲) 第五章 乃魁斯特(Nyquist)稳定性判据 PPT课件

如果在s平面上曲线包围k个零点和k个极点(k=0,1,2…),
即包围的零点数与极点数相同,则在 F(s) 平面上,
相应的封闭曲线不包围 F(s) 平面上的原点。
上述讨论是映射定理的图解说明,奈奎斯特稳 定判据正是建立在映射定理的基础上。
相角(幅角)定理:
如果闭合曲线 s 以顺时针方向为正方向,在 s 平
在右半s平面内的零点数和极点数联系起来的判据。这 种方法无须求出闭环极点,得到广泛应用。
奈奎斯特稳定判据是建立在复变函数理论中的图形映 射基础上的 。
相角(幅角)定理:
如果闭合曲线 S 以顺时针方向为正方向,在[S]平
面上包围了Fs 的 Z 个零点和 P 个极点,但不经过
任何一个零点和极点,那么,对应的映射曲线 F 也以
奈魁斯特稳定判据是利用开环频率特性判别闭环系统的稳 定性。不仅能判断系统的绝对稳定性,而且可根据相对稳定的 概念,讨论闭环系统的瞬态性能,指出改善系统性能的途径。 它从代数判据脱颖而出,故可以说是一种几何判据。
06-7-20
控制系统系统的稳定性分析
2
奈魁斯特稳定判据无需求取闭环系统的特征根,而是利用
F(s) 的轨迹将逆时针方向包围 F(s)平面上原点两次
06-7-20
控制系统系统的稳定性分析
9
s平面
B3
2
1
A0
-1
-2
F -3 -3
-2
-1
j
Im
C
2
1.5
F (s)平面
1 B1
0.5
D
E1
0 C1
F1 -0.5
-1
A
-1.5
D1
控制工程基础- 第5章 控制系统的稳定误差

控制系统的稳态误差
静态误差系数法—— r(t) 作用时 ess 的计算规律
G(s)
G (s)H(s) 1
K (1s 1) (ms 1)
sv (T1s 1) (T nv s 1)
K sv
G
0(s
)
K:开环增益 v:类别(类型)
G (s) (1s 1) (m s 1)
0
(T1s 1) (T nv s 1)
lim
s0
G 0(
s
)
1
R(s)
e(s)
E(s) R(s)
1 1 G1(s)H (s)
1
1
K
v
G0(s)
s
E(s)
G1 ( s )
C(s)
H(s)
ess
lim
s0
se (s)R(s)
lim
s0
s
R(s)
1
1
K sv
G0(s)
稳态误差 ess 与输入r(t)的形式、系统的结构参数(K,v)有关。
Kn
en (s)
E(s) N(s)
1
Tns 1 K
(Tn s
Kn s(Ts 1)
1)s(Ts 1)
K
s(Ts 1)
essn
lim
s0
sen (s)N (s)
lim
s0
s
(Tn s
Kn s(Ts 1) 1) s(Ts 1)
K
1 s2
Kn K
e ess
essr
essn
1 Kn K
控制系统的稳态误差
ess
lim
s0
控制工程基础:第五章系统稳定性

∆2 = a1 a0 a3 a2 = a 1a 2 − a 0 a 3 > 0
∆n
L L L 0 0 0 M 0 an
a5 L
a4 L a3 L M O M 0
a1 ∆3 = a 0 0
a3 a2 a1
0 2 2 a 4 = a 1a 2 a 3 − a 4 a 1 − a 0 a 3 > 0 a3
− c2 =
劳斯表的列法
前两行为特征方程的系数,右移一位降两阶; 前两行为特征方程的系数,右移一位降两阶; 第三行起元素的计算为: 第三行起元素的计算为:分母为上一行第一 个元素; 个元素; 分子为一行列式,第一列为上两行的第一列, 分子为一行列式,第一列为上两行的第一列, 第二列为所计算元素右肩上元素。 第二列为所计算元素右肩上元素。次对角线 减主对角线元素。 减主对角线元素。 一行可同乘以或同除以某正数
c( t ) = ∑ c i e
i =1
k
pi t
+ ∑ e (A j cos ω j t + B j in ω j t )
j=1
r
σ jt
由上式知: 如果p 均为负值, 如果 i 和 σ i 均为负值 , 当 t
∞ 时 , c(t)
0。 。
自动控制系统稳定的充分必要条件: 系统特征方程的根全部具有负实部, 系统特征方程的根全部具有负实部, 闭环系统的极点全部在S平面左半部。 即:闭环系统的极点全部在S平面左半部。 系统特征方程
a4 a5 b3 c3 …
a6 a7 b4 c4 …
… … … …
a1 a5 a1a4 − a0 a5 = a1 a1 a1 a3 b1 b2 b1a3 − a1b2 = b1 b1 a1 a5 b1 b3 b1a5 − a1b3 = b1 b1
第五章控制工程基础

a0 0
系统稳定的充要条件是: 1)系统的特征方程式的各项系数全部为正值,即ai=0 2)由系统特征方程各项系数组成的主行列式及其各顺序主 子式全部大于零。 满足这两个条件的系统是稳定的,否则系统是不稳定的。
胡尔维茨行列式可列写为:
a1 a3 a5 0 0 a0 a2 a4 0 0 0 a1 a3 0 0
Xo (s)
1
G(s) G(s)H(s)
(s
s1)(s
G(s) s2 )
(s sn )
c1 c2
cn
n
ci
s s1 s s2
s sn i1 s si
则输出为:
n
xo (t) ciesit
<1>
i1
从<1>式可看出,要想系统稳定,系统的特征根si, 必须全部具有负实部。
综上所述,不论系统特征方程的特征根为何种形式(实 根或共轭复根),线性系统稳定的充要条件为:所有特征 根均为负数或具有负的实数部分;即:所有特征根均在复 数平面的左半部分。
例 已知某调速系统的特征方程式为
S 3 41.58S 2 517S 1670(1 K ) 0
求该系统稳定的K值范围。 解:列劳斯表
由劳斯判据可知,若系统稳定,则劳斯表中第一列的 系数必须全为正值。可得:
※※ 劳斯判据特殊情况
1. 劳斯表某一行中的第一项等于零,而该行的其余各项不等于零或 没有余项,这种情况的出现使劳斯表无法继续往下排列。解决的办法 是以一个很小的正数 来代替为零的这项,据此算出其余的各项,完 成劳斯表的排列。
控制工程基础:第五章 系统校正

PD控制的作用(特点)
L()
1. 某系统的开环频率特 性——Bode图如图所示。
2. 加相位超前校正。
系统的频率特性发生变化。
60
[20]
40
20
0
( ) 900
[20] [40]
c
[40]
c
[60]
3. 对系统性能的影响
00
(1)改善了系统的动态性能(幅 900
值穿越频率ωc 增大,过渡过程1800
X
i
(s)
(
s)
Gc (s)
U(s)
G(s)
B(s)
H (s)
X 0 (s)
若按控制器与系统 的组成关系,此控制 方式为串联校正。
xi (t)
比例
积分
微分
测量变送
被控对象
x0 (t)
PID控制器是一种线 性控制器。它将偏差的比
例、积分和微分通过线性
组合构成控制量,对被控
对象进行控制。
一、PID控制规律
TD s)
40 20
(1
1 Ti s
TDs)
Ti
s
1 TiTDs2 Ti s
0
1
( )
Ti
1 TD
k(1s 1)( 2s 1) 900
Ti s
00
iD
即:由比例、积分、一阶微 900
分 (2个)环节组成。
由此可见:在低频段,PID控制器主要起积分控制作用, 改善系统的稳态性能;在高频段主要起微分控制作用,提高 系统的动态性能。
§5.1 概述
例如:在车削螺纹时,要求主轴与刀架有严格的运动关系。
主轴转1转→刀架移动一定距离
控制工程基础习题解答5
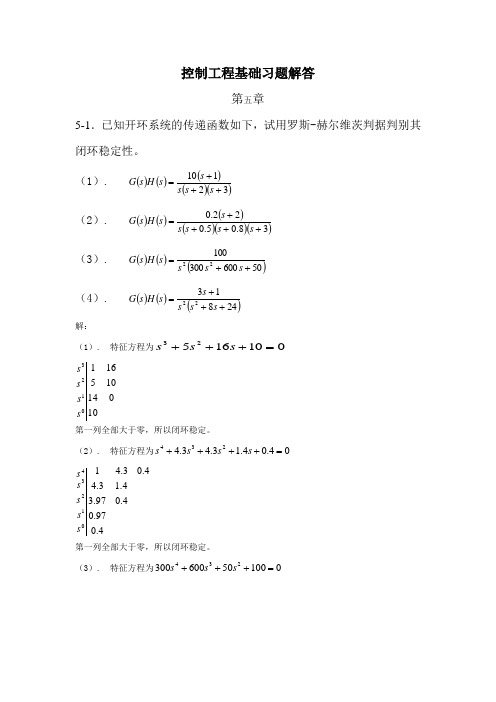
控制工程基础习题解答第五章5-1.已知开环系统的传递函数如下,试用罗斯-赫尔维茨判据判别其闭环稳定性。
(1). ()()()()()32110+++=s s s s s H s G (2). ()()()()()()38.05.022.0++++=s s s s s s H s G (3). ()()()5060030010022++=s s s s H s G (4).()()()2481322+++=s s s s s H s G 解:(1). 特征方程为01016523=+++s s s100141051610123s s s s第一列全部大于零,所以闭环稳定。
(2). 特征方程为04.04.13.43.4234=++++s s s s4.097.04.097.34.13.44.03.4101234s s s s s 第一列全部大于零,所以闭环稳定。
(3). 特征方程为010050600300234=+++s s s100012001005006001005030001234-s s s s s第一列有小于零的数存在,所以闭环不稳定,符号变化了两次,有两个右极点。
(4). 特征方程为013248234=++++s s s s124100380012410038 18924138=5033801241038= 503124100380012410038= 所有主子行列式全大于零,所以闭环稳定。
5-2.已知单位负反馈系统的开环传递函数如下()⎪⎪⎭⎫ ⎝⎛++=1222n n s s s Ks G ωζω式中s rad n /90=ω,2.0=ζ。
试确定K 取何值闭环稳定。
解:方法1:特征方程为0810081003623=+++K s s s 36008100810036810036081001810036222≤≥≥-⨯=K K K K KK36810081003681001810036≤≥-⨯=K K K得当360<<K 时,闭环稳定,当36时,闭环临界稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由于实际的物理系统的参数都是实数,如果它的特征方程有复 数根的一定是对称于实轴的共轭复根,因此,根轨迹总是对称 于实轴的。
结论:根轨迹的分支数等于系统的闭环极点数。根轨 迹是连续且对称于实轴的曲线。
2007-2-23
整理课件
11
规则四 实轴上的根轨迹
实轴上的根轨迹由相角条件可证:设某段右侧的零,极点数分 别为: N z , N p
动态性能 当0kg 1 时, 所有闭环极点均位于实轴上,系统为过
阻尼系统,其单位阶跃响应为单调上升的非周期过程。
当 k g 1 时,特征方程的两个相等负实根,系统为临界阻尼
系统,单位阶跃响应为响应速度最快的非周期过程。
当 k g 1 时,特征方程为一对共轭复根系统为欠阻尼系统, 单位阶跃响应为阻尼振荡过程,振荡幅度或超调量随K g 值的
规则一 根轨迹的起点
m
由根轨迹的幅值条件可知: s z j j1 n s pi
1 kg
i1
当 k g 0 ,必有 spi(i1,2, ,n)
此时系统的闭环极点与开环极点相同(重合),把开环极点 称为根轨迹的起点。
2007-2-23
整理课件
9
规则二 根轨迹的终点
m
由根轨迹的幅值条件可知:
s zj
整理课件
2
5.1 根轨迹的基本概念
一、一个例子
例5-1 一单位负反馈系统的开环传递函数为:
Gk
s
kg s(s
2)
试分析该系统的特征方程的根随系统参数 k g的变化在S平面 上的分布情况。
解 系统的闭环特征方程: s22skg 0
特征方程的根是: s1,2 1 1kg
设 k 的g 变化范围是〔0, ∞﹚
第五章 线性系统的根轨迹法
5.1 根轨迹的基本概念 5.2 根轨迹的绘制规则 5.3 广义根轨迹 5.4 零度根轨迹 5.5 系统性能分析
2007-2-23
整理课件
1
本章重点
➢ 根轨迹的概念、幅值条件、 相角条件 ➢ 根轨迹的基本绘制规则 ➢ 等效传递函数的概念 ➢ 根轨迹的简单应用
2007-2-23
2007-2-23
整理课件
3
当 k g 0 时, s10,s2 2
当 0 kg 1 时, s 1 与 s 2 为不相等的两个负实根;
当 k g 1 时, s1 s2 1为等实根;
当 k g 1 时,s1,2 1j kg1 共轭复根。
该系统特征方程
S
Kg
j
的根,随开环系
统参数k从0变到 ∞时,在S平面上 变化的轨迹如图 所示。
渐近线与实轴的交点位置和与实轴正方向的交角 分别为:
2007-2-23
整理课件
10
规则三 根轨迹的分支数、连续性和对称性
根轨迹的分支数即根轨迹的条数。根轨迹是描述闭环系统特 征方程的根(即闭环极点) 在s平面上的分布,那么,根轨迹 的分支数就应等于系统特征方程的阶数。
由例5-1
看出,系统开环根轨迹增益
k
(实变量)与复变量
g
s有一一对应的关系。
当 k g 由0到∞连续变化时,描述系统特征方程根的复变量s 在平面上的变化也是连续的,因此,根轨迹是n条连续的曲线。
kg 0
P1
kg 1 kg 0
P2
Kg
性能
2007-2-23
整理课件
4
二、根轨迹与系统性能
稳定性 当增益K1由0→∞ ,根轨迹不会越过虚轴进入s平面右半 边,因此系统对所有的值都是稳定的。如果系统特征方程的根 都位于s平面的左半部,系统是稳定的,否则是不稳定的。若根 轨迹穿越虚轴进入右半s平面,根轨迹与虚轴交点处的K值,就是 临界稳定的开环增益。 稳态性能 开环系统在坐标原点有一个极点,所以属Ⅰ型系统, 因而根轨迹上的K值就是静态速度误差系数。如果给定系统的 稳态误差要求,则由根轨迹图确定闭极点位置的允许范围。
j1
n
s pi
1
kg
i1
当 k g 时,必有 szj(j1,2, ,m )
此时,系统的闭环极点与开环零点相同(重合),我们把 开环零点称为根轨迹的终点。
结论:根轨迹起始于开环极点 (k g 0) ,终止于开环
零点 (kg ) 。
如果开环极点数n大于开环零点数m,则有n-m条根轨迹终止 于S平面的无穷远处(无限零点),如果开环零点数m大于开环 极点数n,则有m-n 条根轨迹起始于S平面的无穷远处。
Ns Ds0
即:
N(s) 1
D(s) kg
n
(s zi ) i1
n
(s pj )
j 1
z i 开环的零点
pi
开环的极点
2007-2-23
整理课件
6
根轨迹图是闭环系统特征方程的根(闭环极点)随开环系 统某一参数由0变化到∞时在S平面上留下的轨迹。
由此可得到满足系统闭环特征方程的幅值条件和相角条件为:
幅值条件:
n
n
1 kg
(s zi )
i1
n
(s pj )
(s zi )
i1
n
(s pj )
j1
j1
相角条件:
m
n
(s zi) (s p i) (1 2 k ),k 0 ,1 ,2 ,3 ....
i 1
j 1
2007-2-23
整理课件
7
我们可以把系统的闭环特征方程的根描述成: 凡是满足幅值条件和相角条件的s值称为特征方程 的根——即闭环极点。
则: mi njN zN p(12k) i1 j1
即右侧开环零,极点数的和为奇数时,该段为根轨迹。
2007-2-23
整理课件
12
规则五 渐近线
当开环极点数 n大于开环零点数m时, 系统有n-m条根轨 迹终止于S平面的无穷远处,这n-m条根轨迹变化趋向的直线 叫做根轨迹的渐近线,因此渐近线也有n-m条, 且它们交于实 轴上的一点。
增加而加大,但调节时间不会有显著变化。
2007-2-23
整理课件
5
三、根轨迹的概念
设系统的开环传递函数为:
Gk
s
kg N(s) D(s)
k g 为根轨迹增益(或根轨迹的放大系数)
其中:
n
N(s) (s zj ),
n
D(s) (s pj )
j1
j1
可得到系统的闭环特征方程式为:
1Gks01kg
注:因为Kg从0变化,因此不论什么s值,总有一个 K g 存在,使幅值条件得到满足,所以,实际上只要满足 相角条件的s值就是闭环极点,而由此s值,再由幅值条 件可确定此时系统对应的K g 值。
2007-2-23
整理课件85.2 Nhomakorabea轨迹的绘制规则
通常,我们称以开环根轨迹增益为可变参数绘制的根轨迹为 普通根轨迹(或 180°根轨迹),简称根轨迹。