舰载机纵向自动着舰控制
舰载机着舰指挥引导技术
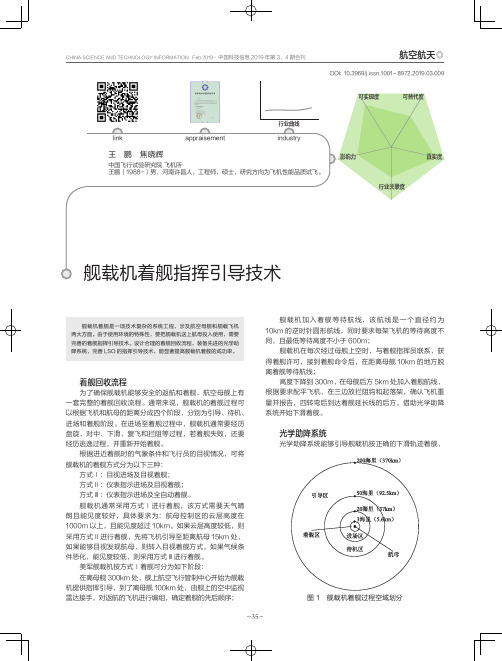
link appraisement王 鹏中国飞行试验研究院 飞机所王鹏(1988-)男,河南许昌人,工程师,硕士,研究方向为飞机性能品质试飞。
目前各国航母上普遍采用的光学助降系统是菲涅尔透镜光学助降系统。
为了使菲涅尔透镜射出的光束尽量不受母舰摇摆的影响,菲涅尔透镜光学助降系统通常安装于航母斜角甲板中部的左舷。
菲涅尔透镜光学助降系统由5个灯室上下叠成一起组成,每个灯室内有3只灯泡产生光源,并通过菲涅尔透镜和其前方的柱状透镜形成0.34°的垂向视场和40°的横向视场,整个5个灯室组成的菲涅尔指示灯可以为飞行员提供垂向1.7°和横向40°的线性光学视场,飞行员在该视场内可以看见一个琥珀色的直线性很好的柱形光束,该光束称为“肉球”。
在舰载机下滑着舰时,飞行员可以通常“肉球”和绿色基准灯判断飞机的位置。
当“肉球”和绿色基淮灯在同一直线上时,飞机在理想下滑轨迹上,只要继续保持就能着舰;到最优迎角;当黄色环形灯亮时,说明飞机速度正好,继续保持。
LSO 指挥引导技术与舰载机着舰安全直接相关。
飞行前,LSO 在与塔台指挥员、飞行员完成沟通协调后,应提前到LSO 平台,完成设备、人员等准备情况的检查。
飞行中,LSO 的指挥应贯穿于整个着舰过程的各个阶段,具体包括:着舰阶段开始后,完成与塔台指挥员的指挥交接;指挥飞行员完成1转弯和2转弯;三边航线时确认飞机状态和侧方计时;提醒飞行员180°转弯时机,并观察飞机在90°位置的高度;根据飞行员看灯情况控制起始点位置;在整个下滑进图2 菲涅尔透镜光学助降系统菲涅尔透镜肉球位置图4 LSO 平台及工作情形。
舰载机纵向自动着舰控制系统设计

Ke rs LQG/ TR to oo y;u o t a dn ;o u te s la iglw ywo d : L meh d lg a tmai ln ig r b sn s ;e dn a c
lwsa d la ig lws Th u o tcln ig c n r ls se lwsweed sg e y LQG/ TR d sg t o oo y a n edn a . ea tmai a dn o to y tm a r ein d b L ein meh d lg .
r b s n s n e o pi g p o e t . Th a e ic s e h e i n o h u o tc l n i g c n r ls s e c n r l o u t e s a d d c u l r p ry n e p p r d s u s s t e d sg f t e a t ma i a d n o to y t m o t o
线 性 二次型 高斯 函数 / 回路 传递 复现 ( QG L /
L TR) 于 分离 定 理 进行 两 个 方 面 的设 计 : 基 状态 观测器 、 以及全状 态反 馈控 制器 。
2 1 观 测 器 设 计 .
窄 ; 体前行 时 , 浪所 造 成 的舰 体 三 自由度偏 舰 海 摆及垂 直起伏 运 动 , 飞机 的预 期 着舰 点变 成三 使
ln ig c n r l y tm o n i dn l o to ws a dn o to se f rl gt ia n r la .Th eut h w ta h o to e in d b h QG/ TR o s o u c l ers l s o h tt ec n r l sg e yt eL s d L ir— s
舰载机着舰过程中甲板运动补偿技术研究

带有舰尾流的舰载机进场动力补偿系统分析

600 270
öæ
֍
øè
s2
+
1 325 29.85s +
1
325
öù
÷ú
øû
(3)
式中:s 为拉普拉斯算子;q0(s) 为输入的拉氏变
换
;q(
s)
为
输
出
的
拉
氏
变
换
;δ e
(
s)
为
操
纵
杆
量
的
拉氏变换。
在 未 加 入 姿 态 飞 行 控 制 系 统 前 ,加 入 单 位 阶
跃输入后得到俯仰角的曲线如图 4 所示。
γ » sin γ =
P cos α mg
-
D mg
-
1 g
×
dV dt
(6)
图 7 所示为飞机阻力随速度变化的曲线。在
由图 4 可以看出,俯仰角无法跟踪输入,俯仰 着舰时,飞机主要工作在阻力曲线的背面区域,即
控制存在不稳定现象。
图 中 最 小 阻 力 的 左 边 区 域(最 小 阻 力 对 应 的 速 度
Kq
滞后超前 滤波器
图 3 纵向增稳控制器结构图 Fig.3 The block diagram of control augmentation system
运 动 方 程 线 性 化 。 利 用 小 扰 动 线 性 化 ,可 建 立 如
根 据 文 献[3]提 供 的 参 数 可 以 建 立 以 上 各 个
Vol.8 No.3 Jun第. 280卷13
带有舰尾流的舰载机进场动力补偿系统分析
钟涛
海军装备部 舰船办公室,北京 100071
摘 要:舰载机发生事故主要是在着舰过程中,其主要原因在于舰载机低速着舰时航迹控制不稳定。为克服这
舰载机着舰控制律

舰载机着舰控制律
舰载机着舰控制律(Aircraft Carrier Landing Control Law)是指在舰载着陆中,为保证舰载机按照预定路径安全着陆,利用飞行控制系统对舰载机姿态、速度进行控制的一种自动化控制系统。
舰载机着舰控制律的主要任务是在通常情况下以尽量少的飞行员干预情况下,使舰载机按照着陆路径精确定位和精确定向,保障舰载飞机安全着陆。
舰载机着舰控制律包括三个环节:导航控制环节,姿态控制环节和机动控制环节。
导航控制环节:导航控制环节是指通过地面雷达跟踪、测距设备测定等手段,确定目标点和航空母舰之间的位置和距离,同时根据给出的飞行计划获得舰载机下一个跟随点的位置,确保舰载机按照预定路径正确着陆。
姿态控制环节:姿态控制环节主要是控制舰载机的姿态,在舰载机接近甲板时,通过姿态飞行控制器以控制舰载机飞行姿态稳定,并保持预定率限制。
机动控制环节:机动控制环节主要是控制舰载机的速度和位置,在着陆时将舰载机放在预定的位置和速度上。
如果舰载机速度过快,需要降低油门以达到安全着陆的要求。
如果舰载机速度过慢,需要增加油门以保证舰载机能够飞行。
为了防止舰载机在着陆过程中出现困难或错误,舰载机着舰控制律需要能够自适应各种情况,并能够提供预警。
此外,舰载机着舰控制律也需要注意天气变化,比如风速、方向、海浪等变化。
总之,舰载机着舰控制律对于舰载飞机的安全着陆和舰载机的稳定飞行起到了至关重要的作用。
在技术趋势不断发展的今天,不断改善和创新舰载机着舰控制律仍然是现代军事装备研究的重要课题之一。
第7章 ACLS

第7章舰载飞机自动着舰导引7.1 舰载机及全天候着舰导引系统舰载飞机问世于第一次世界大战期间,至今已有70余年的发展历史。
进入60年代后,由于武器技术的发展,例如低空高速飞机,反舰导弹,以及高速深潜大航程低噪声潜艇的出现,大型航母与舰载机所构成的武器作战系统加强了空中预警与水下反潜能力,舰载机逐步成为由战斗机、预警机、反潜机、侦察机、加油机、直升机和运输机所构成的机群。
常规舰载机尾部装有专门尾钩,在航母甲板上着舰时,尾钩钩住甲板上的阻拦船索,飞机所具有的动能由与阻拦钢索相连的缓冲器吸收,一般只滑跑几十米就可停下。
为减少停放空间,机翼可折叠。
由于着舰没有拉平段,以 5.3左右下滑角着舰,因此要求有特殊强度的起落架。
以某型如图7-1所示核动力航母为例,满排水量91400吨,长332.4m,宽76.8m,各类飞机90至100架。
动力装置为二台原子能反应堆,总功率为28~32万马力,舰速约33节。
采用斜直两段飞行甲板,其中直通甲板专供弹射起飞。
图7-1 航母甲板配置由于直通甲板长度为80~90m ,而现代飞机需加速到350km/h 后才能起飞,因此多数固定翼飞机都需有蒸汽弹射器,使飞机在60m 左右的距离内加速起飞。
斜角甲板在航母左侧,与舰艇首尾中心线成︒︒13~6夹角,供飞机着舰,其长度约为220m 至270m ,宽27m 至30m ,跑道长度仅为陆基飞机的1/10。
甲板上装有4根拦阻索,每隔约12m 横设一根钢索,高0.5m ,与甲板下的液压阻尼器相连。
着舰时飞机尾钩钩住任意一根,由拦阻索巨大的阻尼力使飞机经60m 左右停下。
另外,若飞机着舰前尾钩不能放下,或燃油耗尽不能复飞等意外情况需迫降时,一般在第三条拦阻索位置处架设拦机网,飞机冲到网上后,连机带网冲出40m~50m 后停下。
采用菲涅尔透镜光学助降系统由助降镜与稳定平台两部分组成。
助降镜装在稳定平台上,以保证镜中所透射的光束不受舰体摇摆的影响。
“艾科尔斯”改进型光学助降系统的纵向着舰精度研究

V_ .9 No 2 0 2 1 .
舰载机自动着舰引导与控制综述

舰载机自动着舰引导与控制综述
张志冰;甄子洋;江驹;薛艺璇
【期刊名称】《南京航空航天大学学报》
【年(卷),期】2018(050)006
【摘要】引导与控制是舰载机自动着舰的关键技术,为此本文对该技术进行综述.给出了舰载机进场航线和几种着舰工作模式,概述了基于跟踪雷达的着舰引导系统和基于卫星的着舰引导系统的工作原理及关键技术,着重分析了自动着舰的几种控制技术,包括控制律设计技术、直接力控制技术、推力矢量控制技术、甲板运动预估与补偿技术、舰尾气流抑制技术、动力补偿技术以及着舰安全控制技术.最后,从多系统集成着舰控制技术、多体制融合着舰引导技术两方面对自动着舰引导与控制技术进行了展望.
【总页数】11页(P734-744)
【作者】张志冰;甄子洋;江驹;薛艺璇
【作者单位】南京航空航天大学自动化学院,南京,211106;沈阳飞机设计研究所,沈阳,110035;南京航空航天大学自动化学院,南京,211106;南京航空航天大学自动化学院,南京,211106;南京航空航天大学自动化学院,南京,211106
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.基于H2预见控制的舰载机自动着舰控制方法 [J], 邵敏敏;龚华军;甄子洋;江驹
2.舰载机着舰控制综述 [J], 孙成;蒋丰亦
3.基于模糊控制的舰载机着舰指挥官引导系统建模 [J], 李晖;朱齐丹;张智;于梦竹
4.舰载机自动着舰引导控制律参数整定 [J], 李晖;朱齐丹;张智;杨柳
5.抑制尾流扰动的舰载机纵向自动着舰预测控制 [J], 王立鹏;王立辉;张智;朱齐丹因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
舰 载 机 纵 向 自动 着 舰 控 制
彭 秀艳 , 志 文 , 王 吴鑫
( 尔滨 工程 大学 自动 化 学院 , 龙 江 哈 尔滨 10 0 ) 哈 黑 50 1 摘 要 : 舰 载机 纵 向着 舰 控 制 系统 进 了分 析 和 研 究 , 据舰 船 甲 板 运 动 引 起 舰 载 机 着 舰 点 不 断 变 化 的 问题 , 入 对 根 加
b s d a rr f l n i g e rrwa f ci ey r d c d a d t e s c r y p r r n e o e ln ig wa n a c d w t a e i at a d n ro s ef t l e u e n h e u i ef ma c f h a dn s e h n e i c e v t o t h
律 比常规 的 PD导 引 控 制律 具 有 更 好 的控 制 下 滑 轨迹 的能 力 , 能满 足 着 舰 的需 要 . I 更
关键词 : 自动着舰控制 ; 模糊控制 ; 甲板运动补偿 ; 向导引律 纵
中 图分 类 号 : P 8 V 4 .2 . 文 献 标 识码 : 文章 编 号 : 7 -75 2 1 )20 7 - T I ;2 9 12 5 A 1 3 8 (0 1 0 -120 6 4 6
第 6卷 第 2期 21 0 1年 4月
智
能
系
统
学
报
V0 . № . 16 2 Ap . 01 r2 1
CAAITr n a to s 0 n elg n y t ms a s cin n I tlie tS se
d i 1 . 9 9 j i n 1 7 - 8 . 0 1 0 . 1 o :0 3 6 /.s . 6 34 5 2 1 . 2 0 3 s 7
甲板运 动补 偿 环 节 , 对 补 偿 律进 行 了设 计 ; 常规 的纵 向导 引控 制 律 进 行 了改果 表 仿
明, 引入 甲板运动补偿环节 , 有效地减小了由于 甲板运动造成的着舰误差 , 提高了着舰 的安全性 , 模糊 PD导引控制 I
te a p ia in o h p d c to o e s to e me t.Th e u t lo d mo sr t h tt e f z y PI d rc h p lc t fs i e k moin c mp n a in s g n s o e r s lsa s e n tae t a h u z D ie — t n g i a c o to a i u e irt h o v n in lPI g i a c o to a i o toln h are — a e i u d n e c n rllw s s p ro o t e c n e t a D u d n e c n r llw n c n rli g t e c rirb s d o o
arr f ldng ru i e,b te aif i g t e ie ns o h a re — a e ic atl n ig ic a gi i o tn t e trs tsy n her qur me t fte c rirb s d a r rf a dn .
d c oin c u e o sa t c a g s i h c rirb s d ar r f ln ig p it , d c to o e k m to a s s c n tn h n e n t e a re — a e ica t a d n o n s e k moin c mpe s to e - n ain s g
Ab t a t: sud s c n u td o a re — a e ic a a d n o to y t m. Ba e n t e fc h ts i sr c A t y wa o d c e n a c rirb s d ar r f ln i g c n rls se t s d o h a t ta hp
PENG u a Xi y n,W AGNG h we Z i n,W U Xi n
( o e eo A t ai , ri n i ei n es y H ri 1 0 0 ,C i ) C l g f uo t n Ha nE g e r gU i r t, ab 5 0 1 h a l m o b n n v i n n
Re e r h o a re - a e u o a i o g t d n l s a c n a c r ir b s d a t m t l n iu i a c
a r r f a d n o t o y t m i c a t l n i g c n r ls se
me t r d e n h o e s to a wa ede in d.Th o e to a e c lg i a c o to a wa n swe e a d d a d te c mp n ain lw s r - sg e e c nv n in lv  ̄i a u d n e c nr llw s i r v d t o g h n r d cin o u z I g d n e c n r 1 mp o e hru h te ito u to fa f z y P D uia c o to .Th i l t n r s l n ia e ta h a re - e smuai e ut id c t h tt e c rir o s