【CN109871628A】一种用于评估水陆两栖飞机适航符合性的仿真计算系统和方法【专利】
民用飞机MC8试验平台的适航要求及符合性验证方法研究

民用飞机MC8试验平台的适航要求及符合性验证方法研究于海生
【期刊名称】《机械设计与制造工程》
【年(卷),期】2022(51)8
【摘要】当民用飞机模拟器试验平台作为一种符合性验证手段用于表明适航条款的符合性时,需要通过适航局方的合格鉴定。
目前还没有适用于如何对模拟器试验平台作为一种适航符合性验证手段进行合格鉴定的详细指南。
基于国内已有民用飞机型号的适航取证经验,结合在研飞机型号适航取证过程中遇到的相关问题研究,参考国内外适航指导材料,提出用于表明适航符合性的模拟器试验平台的总体适航要求及符合性验证思路,包括表明符合性范围、研制过程保证、构型管理和逼真度要求及符合性验证思路。
【总页数】5页(P50-54)
【作者】于海生
【作者单位】上海飞机设计研究院
【正文语种】中文
【中图分类】V21
【相关文献】
1.现代民用飞机气动弹性模型低速风洞试验适航符合性验证技术研究
2.民用飞机货舱灭火系统适航符合性验证试验方法研究
3.民用飞机含高能转子的设备适航符合
性验证方法研究4.民用飞机航电系统地面试验室适航符合性验证试验(MoC4)流程的研究5.直升机操作试验适航要求及符合性验证方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
水陆两栖飞机全动飞行模拟机试飞数据精度要求

水陆两栖飞机全动飞行模拟机试飞数据精度要求摘要:全动模拟机研制核心是数据包的研制,数据包由设计数据,试飞数据、供应商数据、工程试验数据等数据构成,不同级别的模拟机所需要的数据精度要求不同,本文在研究总结陆机飞机全动飞行模拟机试飞数据采集的种类及精度的基础上,结合相关规章、标准以及水陆两栖飞机模拟机数据包试飞科目讨论出水陆两栖飞机模拟机数据包试飞数据采集精度要求。
关键词:水陆两栖飞机、飞行模拟机、试飞数据、精度中图分类号:xxx 文献标识码:xxx引言飞行模拟机是一种模拟航空器执行飞行任务时的飞行状态、飞行环境和飞行条件,并给飞行员(空勤人员)提供相似的操纵负荷、视觉、听觉、运动感觉的试验和训练装置[1]。
飞行模拟机通常由模拟座舱、运动系统、视景系统、计算机系统、声音系统及教员控制台系统等几部分组成[2]。
飞行模拟设备需要根据中国民用航空总局发布的CCAR-60部《飞行模拟设备的鉴定和使用规则》进行客观测试及主观测试等内容[3]。
数据包的研制直接影响着模拟机鉴定结果,鉴定科目中需要对平飞、爬升、纵向操纵的个多个科目进行校验,因此,没有试飞数据,数据包研制工作无法完成[4]。
试飞数据的生成流程试飞数据分为两部分,一部分是为了模拟机数据包验证所需的试飞数据,可根据IATA《Flight Simulation Training Device Design and PerformanceData Requirement》文件中试飞验证内容及CCAR-60部《飞行模拟设备的鉴定和使用规则》一般要求及客观测试内容总结得出部分试飞科目[5]。
另外一部分是为了补足数据包,而工程数据无法满足的情况下进行的试飞工作。
试飞数据的生成流程如图1:在工程数据无法满足数据包开发的情况下,对试飞数据进行需求分析,主要分析建模数据需求及验证数据需求,看数据是否完整,建模数据需求主要是气动辨识需求及模型校验需求,验证数据需求主要是根据CCAR-60部按照科目要求进行。
一种民用飞机机载软件工程评审程序及要求

一种民用飞机机载软件工程评审程序及要求【摘要】本文制定了适用于国内民用飞机机载软件工程评审程序及要求,明确了在适航当局介入审查前,申请人及供应商应完成的软件适航工程评审工作。
申请人和供应商通过严谨细致的工程评审,保证提交的机载软件符合性证据的质量,从而提高申请人机载软件适航信誉,提高适航当局审查效率及审查通过率。
【关键词】水陆两栖飞机;机载软件;适航;工程评审1前言众所周知,局方开展软件审查的目的,是通过对软件生命周期过程和生命周期数据的检查,确保申请人开发的软件符合经批准的DO-178B/C标准及局方提出的额外要求,以保证民用飞机机载软硬件满足适航审定基础要求。
目前,局方主要参考FAA的管理方式进行软件审查,对申请人开展软件计划阶段、开发阶段、验证阶段和完结阶段四个阶段审查。
为达到局方适航审查要求、提高审查效率、节约飞机取证时间及局方介入审查的人员成本的目的。
本文参考FAA审查流程,提出在适航当局介入软件审查前、申请人工程评审程序要求。
通过申请人内部重重的工程评审过程,以及严格的工程评审要求,保证申请人提交局方审查的软件符合性证据质量。
2组织架构及职责受国内主机单位人员架构限制,国内民用飞机主机单位通常将机载系统/设备外包给不同供应商进行研发,机载软件也随之外包给不同供应商进行研制。
因此,尽管机载软件适航申请人为主机单位,但在交付主机单位之前,机载软件的生命周期过程均在供应商处发生,DO-178B/C中目标符合性活动及证据基本在供应商处产生。
因此,软件工程评审组织架构主要包括主机单位和软件研发单位。
2.1 主机单位作为申请人,在提交适航审定前,应完成以下工作:a)确保已完成主机介入的工程评审;b)确保在提交适航审定前,软件生命周期活动及符合性证据满足审定当局已批准的符合性方法。
2.2 软件研发单位作为的软件研发生命周期责任主体,主要工作如下:a)按照已批准的符合性方法,开展软件生命周期活动,产生符合性证据;b)完成供应商内部工程评审;c)向主机单位发起《工程评审申请》,配合完成主机单位介入的工程评审;d)跟踪评审问题的验证归零;e)与主机单位共同支持和配合审定当局完成软件各阶段审查。
水陆两栖飞机着水静力试验载荷计算方法[发明专利]
![水陆两栖飞机着水静力试验载荷计算方法[发明专利]](https://img.taocdn.com/s3/m/123b23ea03d8ce2f0166239f.png)
专利名称:水陆两栖飞机着水静力试验载荷计算方法专利类型:发明专利
发明人:胡亮文,曾毅
申请号:CN201910968404.2
申请日:20191012
公开号:CN110750890A
公开日:
20200204
专利内容由知识产权出版社提供
摘要:本发明涉及水陆两栖飞机着水静力试验载荷加载技术,具体涉及一种水陆两栖飞机的着水试验载荷的计算方法。
本发明通过满足适航规章条款的要求的着水总载荷和作用点以及分布着水压力,构建几何外形和压力分布的分段线性函数,依此求出得到着水区域内的着水总载荷和作用点。
然后根据着水区域内的压力分段函数和几何外形函数,求解得到各框上的垂向载荷,再根据船体压力分布的可以计算得到船体的侧向水载荷。
本发明将水陆两栖飞机着水时水载荷的面压力转换为静力试验能直接施加的集中力,实现对船体复杂外形的曲面压力水载荷模拟,解决复杂船体着水面载荷很难施加的技术难题,为水陆两栖飞机静强度试验的校核提供依据。
申请人:中航通飞研究院有限公司
地址:519090 广东省珠海市金湾区航空产业园中航通飞产业基地
国籍:CN
代理机构:中国航空专利中心
代理人:张毓灵
更多信息请下载全文后查看。
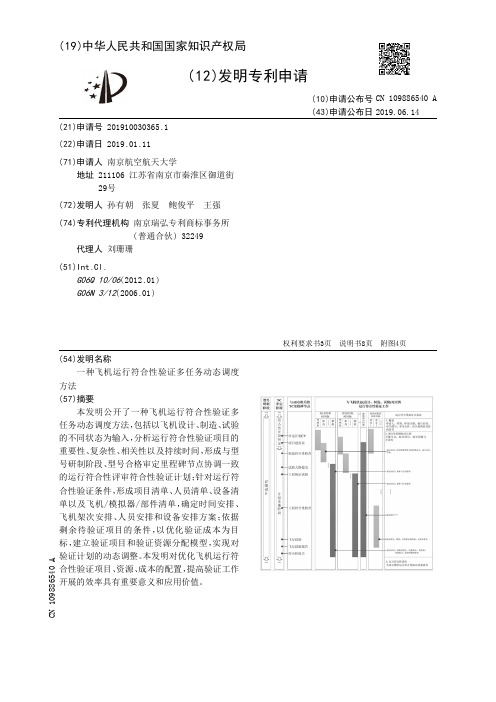
【CN109886540A】一种飞机运行符合性验证多任务动态调度方法【专利】
CN 109886540 A
权 利 要 求 书
3/3 页
群中矩阵的任意位置作为交叉点进行元素重组,根据约束条件筛选出符合要求的矩阵构成 新一代分配方案种群;
3)变异:根据设定的变异概率从交叉处理后的分配方案种群中随机选择任务分配矩阵 的任意位置进行变异,改变矩阵中0和1的分布情况后添加到新一代分配方案种群中;
4
CN 109886540 A
说 明 书
1/8 页
一种飞机运行符合性验证多任务动态调度方法
技术领域 [0001] 本发明属于航空器运行支持技术与运筹规划学领域,涉及一种飞机运行符合性验 证多任务动态调度方法。
权利要求书3页 说明书8页 附图4页
CN 109886540 A
CN 109886540 A
权 利 要 求 书
1/3 页
1 .一种飞机运行符合性验证多任务动态调度方法,其特征在于,包括步骤: (1)获取项目清单、人员清单、设备清单、飞机/模拟器/部件清单;项目清单中记载所有 需要验证的验证项目 ;验证项目包括验证对象 、验证参数、项目优先级、该验证项目对设备 的要求、该验证项目对验证人员的要求; (2) 确定调度模型参数集 ,包括验证项目 、验证资源和验证成本 ;其中 ,验证资源包括人 员清单中记载的人力资源和设备清单中记载的设备资源; (3) 对 调度模型参数集中的 参数进行 编码 ,得到验证项目向 量P、验证资源向 量R 、验证 成本矩阵C: P=[p1 p2 … pm] R=[r1 r2 … rn]
4)复制:对于在步骤2)和3)中没有进行交叉和变异的任务分配矩阵 ,直接添加到新一 代分配方案种群中;
5)循环迭代:重复交叉、变异、复制的过程,根据目标函数的收敛情况更改迭代次数,直 至设定的误差阈值后获得最优任务分配矩阵 ;
【CN109774951A】一种用于海空两栖飞行器的能源自主管理系统【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910188393.6(22)申请日 2019.03.13(71)申请人 江苏科技大学地址 212003 江苏省镇江市梦溪路2号(72)发明人 秦源 王思琪 陈浩 李德明 杨晓飞 叶辉 朱志宇 (74)专利代理机构 南京正联知识产权代理有限公司 32243代理人 张玉红(51)Int.Cl.B64D 31/00(2006.01)B64D 27/24(2006.01)B60L 58/10(2019.01)(54)发明名称一种用于海空两栖飞行器的能源自主管理系统(57)摘要本发明公开了一种用于海空两栖飞行器的能源自主管理系统,包括智能控制模块、无线控制终端、驱动能源模块、安全检测模块、互联模块和能量检测模块;所述智能控制模块分别与所述驱动能源模块、无线控制终端、安全检测模块和能量检测模块进行双向连接;所述驱动能源模块包括太阳能供电能源,航模电池能源和铝—空气电池能源。
本发明公开的自主管理系统包含三种供电方式,可最优化供电,使得两栖飞行器续航能力明显提高;同时可以对飞行过程中的能源情况进行实时的安全检测,使得两栖飞行器安全稳定性明显提高。
权利要求书2页 说明书4页 附图2页CN 109774951 A 2019.05.21C N 109774951A权 利 要 求 书1/2页CN 109774951 A1.一种用于海空两栖飞行器的能源自主管理系统,其特征在于,包括智能控制模块、无线控制终端、驱动能源模块、安全检测模块、互联模块和能量检测模块;所述互联模块包括蓝牙模块、WiFi模块、2.4G模块和4G模块;所述智能控制模块分别与所述驱动能源模块、无线控制终端、安全检测模块和能量检测模块进行双向连接,所述驱动能源模块分别与安全检测模块和能量检测模块连接;所述智能控制模块根据能量检测模块的具体信息、安全检测模块的具体信息和无线控制终端发出的控制信号来控制所述驱动能源模块的工作状态,同时获取所述安全检测模块和能量检测模块的工作信息,所述驱动能源模块包括太阳能供电能源,航模电池能源和铝—空气电池能源。
一种水陆两栖飞机飞行性能适航符合性的评估方法[发明专利]
专利名称:一种水陆两栖飞机飞行性能适航符合性的评估方法专利类型:发明专利
发明人:王峥华,贾重任,程志航
申请号:CN202011289478.2
申请日:20201117
公开号:CN112380792A
公开日:
20210219
专利内容由知识产权出版社提供
摘要:本发明提供一种水陆两栖飞机飞行性能适航符合性的评估方法,包括:根据水陆两栖飞机的设计方案,获取第一数据,第一数据包括:飞机水动升力和水动阻力数据、气动升力和气动阻力数据、不同油门、高度、速度、温度下的发动机拉力特性、发动机耗油特性、重量特性数据;根据第一数据,以及水陆两栖飞机外力数学模型、飞机二自由度平动运动方程组,得到计算结果,计算结果包括飞机在不同适航条款规定的运行状态取值组合下的运行参数;比较各适航条款下的运行参数和对应的航条款对飞机的运行参数的要求,得到飞行性能适航符合性结论。
申请人:中航通飞华南飞机工业有限公司
地址:519040 广东省珠海市金海中路999号201B栋
国籍:CN
代理机构:中国航空专利中心
代理人:王世磊
更多信息请下载全文后查看。
一种水空两栖立体式搜救系统及方法[发明专利]
专利名称:一种水空两栖立体式搜救系统及方法专利类型:发明专利
发明人:马勇,江海洋,李昊,王京,赵玉蛟,栾凤凯申请号:CN202011603766.0
申请日:20201229
公开号:CN112606973A
公开日:
20210406
专利内容由知识产权出版社提供
摘要:本发明涉及一种水空两栖立体式搜救系统及方法,所述系统包括飞行动力模块、航行动力模块、仿生艇模块、航行器及集成控制模块;所述集成控制模块,用于获取天气信息,并根据天气信息选择向飞行动力模块发送飞行信号还是向航行动力模块发送航行信号;所述飞行动力模块,用于在接收到飞行信号后使航行器飞行至待搜救区域;所述航行动力模块,用于在接收到航行信号后使航行器航行至待搜救区域;所述集成控制模块,还用于在航行器飞行或航行至待搜救区域时使航行器投放所述仿生艇模块;所述航行器,用于飞行或航行至待搜救区域,并投放仿生艇模块;所述仿生艇模块,用于在待搜救区域进行搜救工作。
本发明所述系统,提高了海上搜寻与救助的效率。
申请人:武汉理工大学
地址:430070 湖北省武汉市洪山区珞狮路122号
国籍:CN
代理机构:武汉智嘉联合知识产权代理事务所(普通合伙)
代理人:陈建军
更多信息请下载全文后查看。
一种大型水陆两栖飞机船体水密检测系统及方法[发明专利]
专利名称:一种大型水陆两栖飞机船体水密检测系统及方法专利类型:发明专利
发明人:杨敏,范文康,罗海勇,马笑天,苑春华
申请号:CN202011250444.2
申请日:20201110
公开号:CN112461462A
公开日:
20210309
专利内容由知识产权出版社提供
摘要:本发明专利属于水陆两栖飞机船体水密检测工艺方法领域,特别涉及一种大型水陆两栖飞机船体水密检测系统及方法;所述水密检测系统包括水池(3)、水泵(4)、检漏盘(5)、通气阀(8)、压力表(7)、手调式溢流阀(6)、水管(9);本发明通过上述检测系统和方法可快速检测渗漏点,此种方法属于正压水密检测法,检测压力可调,能实际真实还原飞机水中滑行时的受力情况;检测系统装置结构简单,体积小,制作简单,用于外场水上试飞时十分方便灵活,易于生产及应用,飞机制造厂商可将其作为随机工装交付客户,带来巨大经济效益。
申请人:中航通飞华南飞机工业有限公司
地址:519040 广东省珠海市金海中路999号201B栋
国籍:CN
代理机构:中国航空专利中心
代理人:杜永保
更多信息请下载全文后查看。
一种水空两栖无人飞行器[发明专利]
专利名称:一种水空两栖无人飞行器
专利类型:发明专利
发明人:刘彦菊,管清华,孙健,曹鹏宇,杜林喆,冷劲松申请号:CN201710073134.X
申请日:20170210
公开号:CN106585948A
公开日:
20170426
专利内容由知识产权出版社提供
摘要:本发明公开一种水空两栖无人飞行器,包括机身和机翼,机翼的翼肋中设有多边形驱动器,其包括:多边形连杆机构和至少一气动肌肉驱动器,所述多边形连杆机构的连杆与所述翼肋相连接,所述气动肌肉驱动器设置于所述多边形连杆机构形成的多边形空间内,其两端与多边形连杆机构的连杆相连接。
所述连杆机构对所述气动肌肉驱动器起连接和固定的作用,不同方向所述气动肌肉驱动器充气收缩,使所述连杆机构输出不同方向的力,实现凹形和凸形的翼型转换,适用于不同飞行速度要求。
本发明机翼能够智能主动变形,以满足不同航行速度的需求,具有水空两用,快速反应,续航时间长,能够编队飞行等特点,能担负起舰艇编队保驾护航、反蛙人、反微型潜艇等任务。
申请人:哈尔滨工业大学
地址:150001 黑龙江省哈尔滨市南岗区西大直街92号
国籍:CN
代理机构:北京隆源天恒知识产权代理事务所(普通合伙)
代理人:闫冬
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910144920.3
(22)申请日 2019.02.27
(71)申请人 北京航空航天大学
地址 100191 北京市海淀区学院路37号
申请人 中国飞行试验研究院
(72)发明人 王立新 刘静 殷海鹏 杨坤
曹华姿
(74)专利代理机构 北京永创新实专利事务所
11121
代理人 李有浩
(51)Int.Cl.
G06F 17/50(2006.01)
(54)发明名称一种用于评估水陆两栖飞机适航符合性的仿真计算系统和方法(57)摘要本发明公开了一种用于评估水陆两栖飞机适航符合性的仿真计算系统和方法,该系统包括基于适航条款的飞行任务数字化模块(100)、驾驶员模型(200)、飞机模型(300)及风浪扰动模型(400)。
通过基于适航条款的飞行任务数字化模块(100)和驾驶员模型(200)实现适航条款所规定飞行任务的驾驶员操纵模拟,并结合飞机模型(300)和风浪扰动模型(400)完成飞行任务的数字虚拟飞行仿真计算。
本发明的仿真计算系统依据飞行数字虚拟飞行方法,既能够进行适航符合性预验证,也能为飞行试验计划的制定提供支持性数据,缩短了水陆两栖飞机设计初期的时间,有效地避免了在飞行性能、飞机适航性和运行适
应性等方面出现颠覆性的重大问题。
权利要求书2页 说明书19页 附图11页CN 109871628 A 2019.06.11
C N 109871628
A
权 利 要 求 书1/2页CN 109871628 A
1.一种用于评估水陆两栖飞机适航符合性的仿真计算系统,其特征在于:仿真计算系统包括基于适航条款的飞行任务数字化模块(100)、驾驶员模型(200)、飞机模型(300)及风浪扰动模型(400);
所述驾驶员模型(200)包括起飞驾驶员模型单元(201)和降落驾驶员模型单元(202);
所述飞机模型(300)包括飞机飞行动力学模型单元(301)和水动力模型单元(302);
通过基于适航条款的飞行任务数字化模块(100)和驾驶员模型(200)实现适航条款所规定飞行任务的驾驶员操纵模拟,并结合飞机模型(300)和风浪扰动模型(400)完成飞行任务的数字虚拟飞行仿真计算。
2.根据权利要求1所述的一种用于评估水陆两栖飞机适航符合性的仿真计算系统,其特征在于:所述基于适航条款的考核任务数字化模块(100)根据《中国民用航空规程(CCAR-25-R4)》和《GJB185-86有人驾驶飞机(固定翼)飞行品质》中有关水陆两栖飞机适航符合性的部分条款,设计了用于水陆两栖飞机水面起降适航符合性评估的典型飞行任务及对应的任务卡,实现了基于适航条款的飞行任务数字化;飞行任务包括平静水面滑行、平静水面起飞、平静水面降落、侧风中水面起飞、侧风中水面降落、海浪中水面起飞和海浪中水面降落。
3.根据权利要求1所述的一种用于评估水陆两栖飞机适航符合性的仿真计算系统,其特征在于:所述起飞驾驶员模型单元(201)包括起飞水面滑行阶段驾驶员模型(201a)和抬头爬升阶段驾驶员模型(201b);
起飞水面滑行阶段驾驶员模型的纵向操纵目标是控制飞机的俯仰角,使其处于稳定区域内,以满足纵向稳定性的要求;
横航向操纵目标为控制飞机的航迹偏移,以保证飞机的起飞航迹满足要求;
抬头爬升阶段驾驶员模型的操纵目标分为两部分,一是迅速的抬头爬升到达安全高度,二是保持航迹稳定且航迹偏移不能太大;
驾驶员模型包含升降舵通道、副翼通道、方向舵通道和发动机通道四个操纵通道,根据水陆两栖飞机水面起飞任务的驾操纵要求,采用Hess驾驶员模型理论分阶段完成水面起飞任务的驾驶员操纵模型;引入Hess提出的感知模型,描述在不同水面条件下驾驶员接受飞机状态信号的能力;引入多通道驾驶员模型理论,描述驾驶员在进行多通道任务时驾驶员感知能力下降且操纵效果降低的现象。
4.根据权利要求1所述的一种用于评估水陆两栖飞机适航符合性的仿真计算系统,其特征在于:所述降落驾驶员模型单元(202)包括进近阶段驾驶员模型(202a)、拉平阶段驾驶员模型(202b)和降落水面滑行阶段驾驶员模型(202c);
进近阶段驾驶员模型的纵向操纵目标是控制沿着预定的下滑航迹下滑,或以一定的下滑角完成稳定的下滑;
横航向操纵目标是保证飞机不会出现较大的航迹偏移;
拉平阶段驾驶员模型的纵向操纵目标是改变飞行下滑角,减小飞机的下沉速度,获得较为适宜的入水角,在拉平阶段末端将飞机的俯仰角保持在3°左右;
横航向操纵目标是保证飞机不会出现较大的航迹偏移;
降落水面滑行阶段驾驶员模型的纵向操纵目标主要是俯仰姿态控制,保证飞机在水面滑行的纵向稳定性;
横航向操纵目标是通过副翼和方向舵协同作用,保证飞机不会出现较大的航迹偏移;
2。