二阶系统的性能指标
机械工程控制基础29_二阶系统的性能指标
机械工程控制基础29_二阶系统的性能指标二阶系统是指具有两个自由度的机械工程控制系统。
在控制系统理论中,衡量系统性能的指标有许多,比如超调量、调节时间、稳态误差等。
下面将详细介绍二阶系统的性能指标。
一、超调量:超调量是指过渡过程中输出量超过稳态值的最大偏离量。
对于二阶系统而言,其超调量可以通过过冲幅值与稳态值的差进行计算。
具体公式如下:超调量(%)=(过冲幅值-稳态值)/稳态值×100超调量主要反映了系统在过渡过程中的动态性能,是指标中最容易获取的。
二、调节时间:调节时间是指系统输出量从初始稳态值到达稳态值所需要的时间。
对于二阶系统而言,其调节时间通常从过渡过程的时间t1开始计算。
具体公式如下:调节时间=t2-t1其中,t2表示系统输出量进入超定态的时刻。
三、上升时间:上升时间是指系统输出量从初始稳态值到达稳态值所需要的时间,也即是调节时间的一部分。
对于二阶系统而言,上升时间是系统输出量从过渡过程的时间t1到达过冲幅值和稳态值之间的时间间隔。
四、峰值时间:峰值时间是指系统输出量达到过冲幅值或者偏离过冲幅值最远的时刻。
对于二阶系统而言,峰值时间是系统从过渡过程的时间t1到达过冲幅值的时间间隔。
五、稳态误差:稳态误差是指系统输出量在稳态下与期望输入量之间的偏差。
对于二阶系统而言,稳态误差可以通过比较系统稳态值与期望输入量来计算。
稳态误差主要反映系统的静态性能,也即系统对于不同输入的输出表现。
综上所述,二阶系统的性能指标主要包括超调量、调节时间、上升时间、峰值时间和稳态误差。
这些指标可以通过理论计算、仿真分析和实验测试等方法来获取,用于评估和比较不同二阶系统的控制性能。
在实际应用中,根据具体需求和控制要求,可以通过调整系统参数和控制策略等来改善系统的性能指标,并使系统能够更好地满足要求。
二阶系统的性能指标
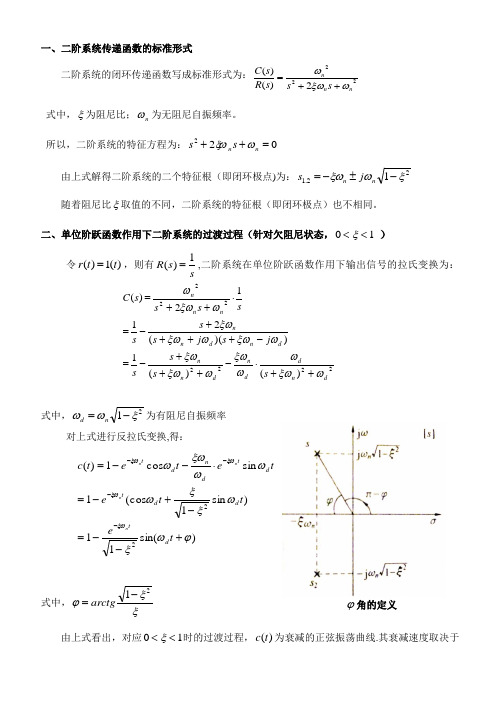
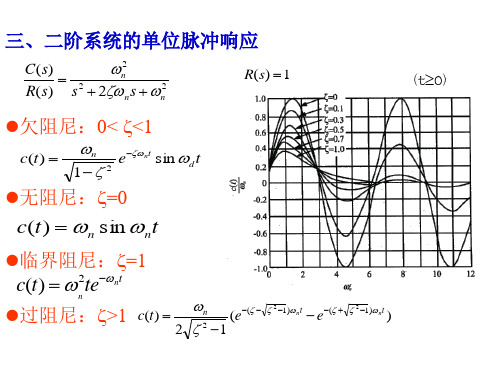
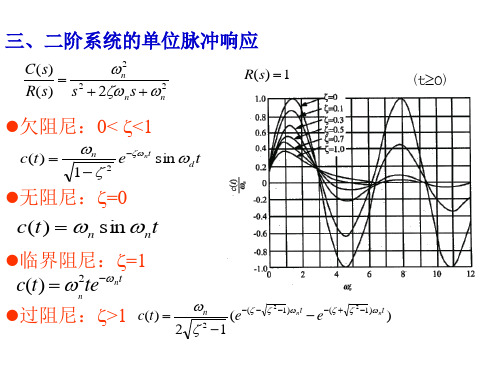
一、二阶系统传递函数的标准形式二阶系统的闭环传递函数写成标准形式为:2222)()(nn ns s s R s C ωξωω++=式中,ξ为阻尼比;n ω为无阻尼自振频率。
所以,二阶系统的特征方程为:022=++n n s s ωξω由上式解得二阶系统的二个特征根(即闭环极点)为:22.11ξωξω-±-=n n j s 随着阻尼比ξ取值的不同,二阶系统的特征根(即闭环极点)也不相同。
二、单位阶跃函数作用下二阶系统的过渡过程(针对欠阻尼状态,10<<ξ )令)(1)(t t r =,则有s s R 1)(=,二阶系统在单位阶跃函数作用下输出信号的拉氏变换为:2222222)()(1))((2112)(d n d d n d n n d n d n n n n n s s s s j s j s s s ss s s C ωξωωωξωωξωξωωξωωξωξωωξωω++⋅-+++-=-++++-=⋅++=式中,21ξωω-=n d 为有阻尼自振频率对上式进行反拉氏变换,得:)sin(11)sin 1(cos 1sin cos 1)(22ϕωξωξξωωωξωωξωξωξωξω+--=-+-=⋅--=----t e t t e t e t e t c d t d d t d td n d t n nnn式中,ξξϕ21-=arctg由上式看出,对应10<<ξ时的过渡过程,)(t c 为衰减的正弦振荡曲线.其衰减速度取决于ϕ角的定义n ξω值的大小,其衰减振荡的频率便是有阻尼自振频率d ω,即衰减振荡的周期为:2122ξωπωπ-==n dd T三、二阶系统的性能指标1.上升时间tr:上升时间是响应曲线由零上升到稳态值所需要的时间。
根据定义,当r t t =时,1)(=r t c 。
即 0sin 1cos 2=-+r d r d t t ωξξω或 nn r d t tg ξωξωω21-=,)(ϕπω-=tg t tg r d所以,上升时间为:21ξωϕπ--=n r t2.峰值时间tp:过渡过程曲线达到第一个峰值所需的时间。
自动控制理论时域分析2--二阶系统

4.调整时间 t s(又称过渡过程时间) :响应曲线达到并 保持与稳态值之差在预定的差值△内(又叫误差带 )所 需要的时间。一般△取±2%或±5%。
二、二阶系统的动态响应性能指标 (1)峰值时间 t P
因为
c (t ) 1 e nt 1
2
sin( d t )
t n p d
dc ( t ) dt
d p
0
ttp
e sin( t ) e cos( t ) 0
t n p n d p
整理得:
tg ( ) dtp
12
p t p 0, ,2 ,3
n
0 Re
s1
s2
0
Re
s2
s1
0
Re
0
Re
s2
(a) 0 1 (b) 1 (c) 1 (d) 0
特征根为:共扼复数 特征根为:
相等实数
不等实数
共扼虚数
1.欠阻尼情况 :
( 0 1 )
2
s n 1 1 , 2 n
s j 1 , 2 n d
c ( t) 1 cos t n
c (t )
( 0)
(t 0)
2
1
0
t
这是一条等幅振荡曲线。
( 0)
c (t )
1
c (t ) r (t )
2
1
1
c (t )
0
t
0
t
( 0 1 )
1
r (t )
欠阻尼二阶系统动态性能指标计算
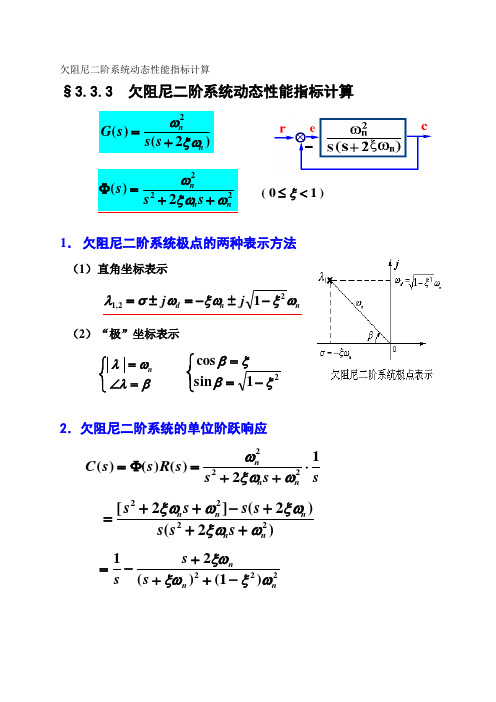
欠阻尼二阶系统动态性能指标计算§3.3.3 欠阻尼二阶系统动态性能指标计算)10(<≤ξ1. 欠阻尼二阶系统极点的两种表示方法(1) 直角坐标表示n n d j j ωξξωωσλ22,11-±-=±=(2)“极”坐标表示⎩⎨⎧=∠=βλωλn⎩⎨⎧-==21sin cos ξβξβ2.欠阻尼二阶系统的单位阶跃响应ss s s R s s C n n n 12)()()(222⋅++=Φ=ωξωω)2()2(]2[2222n n n n n s s s s s s s ωξωξωωξω+++-++= 222)1()(21nn n s s s ωξξωξω-+++-=22222222)1()(11)1()(1nn n n n n s s s s ωξξωωξξξωξξωξω-++-⋅---+++-= 利用复位移定理[])()(a s F e t f L at+=⋅- 系统单位阶跃响应为t e t et h n t n tn n ωξξξωξξωξω2221sin 11cos 1)(-----=--[]t t e n n t n ωξξωξξξξω22221s i n 1c o s 111-+----=-[]t t e nnt n ωξβωξβξξω2221s i n c o s 1c o s s i n 11-⋅+-⋅--=-)10(<≤ξ()t t t hn n ωωcos 190sin1)(-=︒+-=)90,0(︒==βξ)10(<≤ξ系统单位脉冲响应为[]⎥⎦⎤⎢⎣⎡++=Φ='=--222112)()()(n n ns s L s L t h t k ωξωω⎥⎥⎦⎤⎢⎢⎣⎡-++-⋅-=-222221)1()(11n n n ns L ωξξωωξξω欠阻尼二阶系统单位脉冲响应3.欠阻尼二阶系统动态性能指标计算(1)峰值时间p t)()(t k t h ='01sin 122=--=-t en tnn ωξξωξω01sin 2=-t n ωξ,3,2,,012πππωξ=-t n由峰值时间定义(2)超调量00σ()βωξξξω+---=-p n t p t et h pn 221sin 11)(()βπξξξπ+--=--sin 11212e211ξξπ--+=e0σ00100)()()(⨯∞∞-=h h t h p 0011002⨯=--ξξπe超调量0σ与阻尼比ξ之间的关系(3)调节时间 s ts t 对ξ的不连续性调节时间的实际计算方法110.05n n s t t e e -ξω-ξω+-==nns t ξωξωξ5.3)1ln(2105.0ln 2≈-+-= (8.03.0<<ξ))5(0000=∆例1 控制系统结构图如图所示(1)开环增益10=K 时,求系统的动态性能指标;(2)确定使系统阻尼比707.0=ξ的K 值。
3.3二阶系统的动态性能(上)解析
s 2n 1 s [( s n ) jd )][( s n ) jd ]
s 2n 1 s 2n 1 s ( s n )2 ( jd )2 s ( s n )2 d 2
at
s n n 1 s (s n )2 d 2 (s n )2 d 2 n 1 2 1 s n 1 2 2 s ( s n ) d ( s n )2 d 2
5.84 n ts 4.75 n
4、稳态误差为0,说明典型二阶系统跟踪阶跃输入信号时,无稳态误差, 系统为无静差系统。
4.过阻尼(ζ>1)状态
闭环特征方程
特征根
2 s 2 2n s n 0
s1 n n 2 1
s2 n n 2 1
nt
d
L[e at cos t ]
上式取拉氏反变换,得
y(t ) 1 e
1 1
cos d t
1
2
sa ( s a)2 2 L[e at sin t ] ( s a)2 2
ent sin d t
e nt 1 2 e
Δ 2 Δ 5
4T1 1.25 ts 3T 1
Δ 2 Δ 5
1.34
3、稳态误差为0,说明典型二阶系统跟踪阶跃输入信号时,无稳态误 Y(t) 差,系统为无静差系统。
2
4、需要说明的是,对于临界阻尼和过阻 尼的二阶系统,其单位阶跃响应都没有 振荡和超调,系统的调节时间随ζ的增加 而变大,在所有无超调的二阶系统中, 临界阻尼时,响应速度最快。
2 n 1 1 s Y ( s ) ( s ) R( s ) 2 2 2 s n s s s 2 n
自动控制原理第三章二阶系统

1. ζ >1 过阻尼
1 T
e-t/T
c(t)=1-e-t/T
r(t)=t
c(t)=t-T+Te-t/T
可知: 系统输入信号导数的输出响应,等 于该输入信号输出响应的导数;根据一种 典型信号的响应,就可推知于其它。
自动控制原理第三章二阶系统
第二节 一阶系统性能分析
设例ФKk(若=s一 调 t)=s1要=阶 节000CR求系 时.1((ss:sK统 间)),=H的t=求1s+0结(反t1.11s0构0±=馈000•如/5K.系S1%HR图/s(数Ss)),。;=试(_E如0(求.则s0果)11系://K要KKS统HkH求)的S+C1(s) 解Ф:(系s)统=t s=闭CR3((T环ss=))传=3×1递+K01H1函.000=010数0•/./0K3S.1H/=SK0k .=K1HT0.s=11S00K+.0H11/KH
有性任何着 能=二对 指S2阶应 标+GR系(的 与sS1)/=统/L关 其L+CUU的1系 参rc(/(ssL动))C数。=态L间求C=性S的出2能S+2关标R+1指C2系准Sζω标+ω形,1n。2n 式S便+ω的可n动求2
ቤተ መጻሕፍቲ ባይዱ
态 得
2ζ ω n=R/L
得:
ω
2 n
=
1/LC
ω n=1/ LC
ζ=
RC 2L
一阶系统ts =单3位T 阶跃响应:
(±R5%(s))=
1 S
C(s)= tФs =(s4)•TS1
=
1 TS+1
•
1S(=±1S2%- S)+11/T
二阶系统性能指标.
c(t )
n
2 1
2
(e
( 2 1 ) nt
e
( 2 1 ) nt
)
二、二阶系统阶跃响应的特征量
第一次进入误差带 不再出来的时间 c(t) r(t) 1.0
最大超调量Mp,常用相对量描述 第一次达到稳态值时间 Mp%= [c(tp)-c(∞)]/c(∞)*100% ±Δ 带 误差
ts
因1、符合上式答案有多个;2、ts不连续 用包络线近似来简化计算
e 1 1
n tsnts e 1 21
1 Sin ( d t s ) 2
1
nts e 1 2
Sin(dts ) 1
取得包络线方程
1
1
上升时间tr
峰值时间tp
0
5% c() or 2% c()
调节时间ts
t
tr t p
ts
当(>=1)时阶跃响应没有超调,此时, 上升时间的定义修改如下:
1.0 0.9 0.5 0.1 0
C(t)
t ( 0.10.9 ) t ( 0 0. 9 )
tr tr
t
2) 欠阻尼二阶系统阶跃响应的特征量的计算: 上升时间
2
Sin (dtp ) Sin ( ) Sin 1
np
t e MP % Sin(dtp ) 100%
1 2
e
1 2
Sin(dtp ) 100%
1 2
Mp e
100%
最大超调量
仅与阻尼比ξ有关, 故可以通过实验 求取最大超调量 然后可求系统阻 尼比。 ξ越大,Mp 越小, 系统的平稳性越好 ξ = .4~0.8 Mp = 25.4%~1.5%。
二阶系统性能指标解读
0.5, n 4(弧 度/秒) 当 输
入信号为单位阶跃 信号时 , 试求系统的动态 性能指标 . 解:
ln 1 1-
2
2
n
代 入,并 取 整 数 得 1- 2
1- 2 1 N N( ln 2 2 1- N (.)表 示 取 整 数 ts N Td
arctg荡周期
三.计 算 举 例
例1.二 阶 系 统 如 图 所 示 ,其 中
nentp Sin(dtp ) dentpCos(dtp ) 0
Sin(dtp ) 1 2 Cos(dtp ) 0
1 2 tg (dtp ) 2 1 d tan d t tan n
1.5(s) 这里取Δ=0.05。
或者按近似算法:
ts
3
n
3T
3 0.125 1.5( s) 0.25
(2)要使σ%=10%,求ζ。 由
% exp(
解得
1 2 ) 100 % 10%
0.6
2
K0
ts T
1 4 T0
ln 1
上升时间tr
峰值时间tp
0
5% c() or 2% c()
调节时间ts
t
tr t p
ts
当(>=1)时阶跃响应没有超调,此时, 上升时间的定义修改如下:
1.0 0.9 0.5 0.1 0
C(t)
t ( 0.10.9 ) t ( 0 0. 9 )
tr tr
t
2) 欠阻尼二阶系统阶跃响应的特征量的计算: 上升时间
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、二阶系统传递函数的标准形式
二阶系统的闭环传递函数写成标准形式为:22
2
2)()(n
n n
s s s R s C ωξωω++=
式中,ξ为阻尼比;n ω为无阻尼自振频率。
所以,二阶系统的特征方程为:022
=++n n s s ωξω
由上式解得二阶系统的二个特征根(即闭环极点)为:22.11ξωξω-±-=n n j s 随着阻尼比ξ取值的不同,二阶系统的特征根(即闭环极点)也不相同。
二、单位阶跃函数作用下二阶系统的过渡过程(针对欠阻尼状态,10<<ξ )
令)(1)(t t r =,则有s s R 1
)(=
,二阶系统在单位阶跃函数作用下输出信号的拉氏变换为:2
2222
22)()(1
)
)((211
2)(d n d d n d n n d n d n n n n n s s s s j s j s s s s
s s s C ωξωωωξωωξωξωωξωωξωξωωξωω++⋅
-+++-=-++++-
=⋅++=
式中,2
1ξωω-=n d 为有阻尼自振频率
对上式进行反拉氏变换,得:
)
sin(11)
sin 1(cos 1sin cos 1)(2
2
ϕωξ
ωξ
ξ
ωωωξωωξωξωξωξω+--
=-+-=⋅-
-=----t e t t e t e t e t c d t d d t d t
d n d t n n
n
n
式中,ξ
ξϕ2
1-=arctg
由上式看出,对应10<<ξ时的过渡过程,)(t c 为衰减的正弦振荡曲线。
其衰减速度取决
ϕ角的定义
于n ξω值的大小,其衰减振荡的频率便是有阻尼自振频率d ω,即衰减振荡的周期为:
2
122ξ
ωπ
ωπ
-=
=
n d
d T
三、二阶系统的性能指标
1.上升时间tr :上升时间是响应曲线由零上升到稳态值所需要的时间。
根据定义,当r t t =时,1)(=r t c 。
即 0sin 1cos 2
=-+
r d r d t t ωξ
ξ
ω
或 n
n r d t tg ξωξωω2
1-=,)(ϕπω-=tg t tg r d
所以,上升时间为:2
1ξ
ωϕπ--=
n r t
2.峰值时间tp :过渡过程曲线达到第一个峰值所需的时间。
ϕϕωtg t tg dt t dc p d t t p
=+⇒==)(0)
( (Λ,3,2,,0πππω=p d t )
由于峰值时间tp 是过渡过程曲线达到第一个峰值所需的时间,故取πω=p d t
即 21ξ
ωπωπ-=
=
n d p t 3.最大超调量p σ
最大超调量为:%100)
()()(•∞∞-=
c c t c p p σ
%
100%
100)sin 1(cos %
100)sin 1(cos 2
12
2
⋅=⇒•-+
-=•-+-=--
--ξξπξωξωσπξξ
πωξ
ξ
ωe
e
t t e p t p d p d t p
n p
n
式中,)(p t c 为过渡过程曲线第一次达到的最大输出值;)(∞c 为过渡过程的稳态值()(∞c =1)。
4.过渡过程时间ts :在过渡过程的稳态线上,用稳态值的百分数∆(通常取∆=5%或∆=2%)作一个允许误差范围,进入允许误差范围所对应的时间叫~。
)1sin(11)(2
2
ξ
ξωξ
ξω-+--
=-arctg
t e t c d t n
从上式看出,2
11ξ
ξω-±
-t n e 是此时系统
过渡过程)(t c 的包络线方程。
即过渡过程
)(t c 总是包含在一对包络线内,包络线的
时间常数为
n
ξω1。
根据过渡过程时间的定义,可近似认为就是包络线衰减到∆区域所需的时间,则有:
)
11ln 1(ln
1
122
ξ
ξωξξω-+∆=
⇒∆=--n
s t t e n
若取%5=∆,并忽略2
11ln
ξ-,则得:n
s t ξω3
≈
若取%2=∆,并忽略2
11ln ξ-,则得:n
s t ξω4
≈
二阶系统单位阶跃响应的一对包络线。