倒退行走式智能车速度控制算法设计本科设计说明
智能小车控制算法课程设计
智能小车控制算法课程设计一、课程目标知识目标:1. 让学生理解智能小车的基本工作原理,掌握控制算法的基本概念;2. 使学生掌握智能小车运动控制的基本方法,包括速度控制、方向控制等;3. 引导学生了解控制算法在智能小车领域的应用,如PID控制、模糊控制等。
技能目标:1. 培养学生运用编程语言(如Python、C++等)实现智能小车控制算法的能力;2. 提高学生通过实验和调试解决实际问题的能力;3. 培养学生团队协作、沟通表达的能力。
情感态度价值观目标:1. 激发学生对智能小车和控制算法的兴趣,培养创新意识和探索精神;2. 引导学生关注科技发展,认识到控制算法在现实生活中的重要性;3. 培养学生严谨、务实的学习态度,养成良好的学习习惯。
课程性质:本课程为实践性较强的学科,结合理论知识与实际操作,培养学生动手能力、编程能力和创新能力。
学生特点:针对高中年级学生,具备一定的物理知识和数学基础,对新鲜事物充满好奇心,具备一定的自学能力和团队合作精神。
教学要求:注重理论与实践相结合,以学生为主体,发挥教师引导作用。
通过课程学习,使学生能够独立完成智能小车控制算法的设计与实现,达到预期的学习成果。
二、教学内容1. 智能小车基本原理及结构:介绍智能小车的主要组成部分,包括驱动电机、传感器、控制器等,分析各部分的功能和相互关系。
教材章节:《自动化技术基础》第二章2. 控制算法原理:讲解PID控制、模糊控制等基本控制算法的原理,探讨其在智能小车控制中的应用。
教材章节:《控制理论及其应用》第三章3. 编程语言及开发环境:学习Python、C++等编程语言,了解智能小车控制算法的编程实现。
教材章节:《Python编程》第一章、《C++编程》第一章4. 智能小车运动控制:分析速度、方向等运动控制方法,结合实际案例进行讲解。
教材章节:《自动化技术基础》第四章5. 实践操作:组织学生进行智能小车控制算法的编程实践,包括控制算法的设计、调试与优化。
倒退行走式智能车速度控制算法设计概要

本科毕业设计(论文)题目:倒退行走式智能车速度控制算法设计学生姓名:肖莎莎学号:09054103专业班级:测控技术与仪器09-1班指导教师:潘浩2013年6月1日倒退行走式智能车速度控制算法设计摘要本文根据飞思卡尔智能车大赛规则,设计了倒退行走式摄像头智能车的速度控制系统,使智能车能够在赛道上稳定运行。
智能车采用飞思卡尔公司的9S12XSMAA单片机为核心控制器,配合有相应的硬件及H桥电机驱动电路,利用光电编码器测速形成一个闭环负反馈速度控制系统。
通过设计及调整智能车的机械结构和硬件电路图,编写控制系统C语言程序,对电机转速和舵机转角分别采用用增量式PID控制算法和位置式PD控制算法,从而实现对智能车的速度控制。
本文还增加了直道加速、弯道减速的速度控制算法,并且采用了上位机与蓝牙相结合的方式对智能车车速进行调试,以寻求最优的PID控制系统参数。
通过测试,智能车最终能以1.8m/s的速度平稳地通过赛道。
关键词:9S12XSMAA;PID控制;电机控制;舵机控制;H桥电机驱动电路Walking backwards smart car speed control algorithmdesignAbstractIn the background of the Freescale Smart Car Competition, for the regressive group car camera design and image processing algorithms are discussed and research. Smart car through the OV7620 camera capture images using edge detection algorithms to identify the black line, with the active edge to strike the track centerline. Invalid filtered centerline of the calculated center of each line bias, and the track of the overall slope, intercept. Based on the deviation and the slope, the completion of the servo motor PD control and PID control, and track type identification, determine the specific control scheme. Upon completion of the mechanical structure of the smart car modification and hardware system design, through actual testing, constantly optimize the speed of rotation of image processing and control algorithms.Keywords:Image processing; Camera sensors; Path recognition; PID control目录第1章引言.......................................................................................... 错误!未定义书签。
双轮自平衡智能车行走伺服控制算法设计报告

自动控制原理课程设计目录一.引言 (4)二.系统模型的建立 (4)三.系统控制的优化 (9)3.1 PID调节参数的优化 (9)3.2 积分分离PID的应用 (13)四,结语 (16)双轮自平衡智能车行走伺服控制算法摘要:全国第八届“飞思卡尔”智能汽车大赛已经结束。
光电组使用大赛提供的D车模,双轮站立前进,相对于以前的四轮车,双轮车的控制复杂度大大增加。
行走过程中会遇到各种干扰,经过多次的实验,已经找到了一套能够控制双轮车的方法。
双轮机器人已经广泛用于城市作战,排爆,反恐,消防以及空间消防等领域。
实验使用单片机控制双电机的转速,达到了预期的效果。
关键词:自平衡;智能;控制算法Motion Servo Control Algorithm for DualWheel Intelligent CarAbstract: The 8th freescale cup national Intelligent Car competition of has been end.The led team must used D car which has only 2tires.It is more difficult to control prefer to control A car which has 4tires.There is much interference on the track. A two-wheeled robots have been widely used in urban warfare, eod, counter-terrorism, fire control and space fire control and other fields。
We has searched a good ways to control it.We used MCU to control the speed of motors and get our gates.Key Words: balance by self; intelligent; control algorithm一.引言双轮自平衡车是智能汽车中一个重要的组成部分。
自动往返电动小汽车设计

自动往返电动小汽车余密刘勇尹佳喜华中科技大学电工电子创新中心(武汉430074)摘要:本设计以凌阳16位单片机SPCE061A为核心,通过高灵敏度红外光电传感器检测路面上的黑线,并进行计数,从而控制不同路段的速度,以红外对管检测车轮转动周数,根据车轮周长计算出速度及小车行驶路程。
单片机对高灵敏度红外光电传感器检测得到的路面信息进行处理后产生PWM输出,从而控制小车前轮与后轮电机转速,也就控制了小车的速度。
到达终点后,电机端电压反向,则小车行驶方向反向,小车由原路倒退返回。
红外对管检测到的小车车速及行驶路程信息经单片机计算处理后由液晶显示。
关键字:PWM 光电传感器检测调速一方案论证与选择1 电机调速模块电机调速主要是控制小车的速度与行驶方向。
通过对前轮电机转速的控制可控制小车的行驶方向,对小车的行驶速度的控制通过对其后轮转速的控制实现。
此模块为本设计的核心部分。
(1)电机调速方案方案一:电枢回路串电阻调速。
如II-1-1所示,通过单片机控制继电器,这样可以控制接入电枢回路电阻的大小,从而实现串电阻调速。
此方案只能分级调速,而且,串入电阻造成能量损耗,而本设计采用电池供电,显然,需要节能的调速系统,故此方案不能达到要求。
图III-1-1 电机电枢回路串电阻调速电路图方案二:电枢回路串电感调速。
原理图与方案一相同,将电阻换为电感,这样可以减小能耗,但由于电感消耗无功功率,造成电源污染,故不能采用此方案。
方案三:采用弱磁调速,即改变电机气隙磁通。
此方案可以连续调速,而且,能耗小,可由额定转速向高速方向调节,也可由额定转速向低速方向调节。
但由于小车电机不为他励直流电机,故很难改变磁通大小,方案难以实现。
方案四:采用改变端电压调速。
根据直流电机机械特性方程n=U a/k eФ+(R a+R j)T/k e k TФ2=n0-βT Tn——电机转速;n0——电机空载转速;k e、k T——电机结构参数所确定的电机电势常数、转矩常数;Ф——气隙磁通;U a——电动机电枢电压;R a、R j——电机电枢电阻及串入电阻;T——负载转矩;βT——机械特性曲线斜率;由上述直流电动机机械特性知,改变电枢端电压,可以连续改变电动机转速。
智能车控制算法
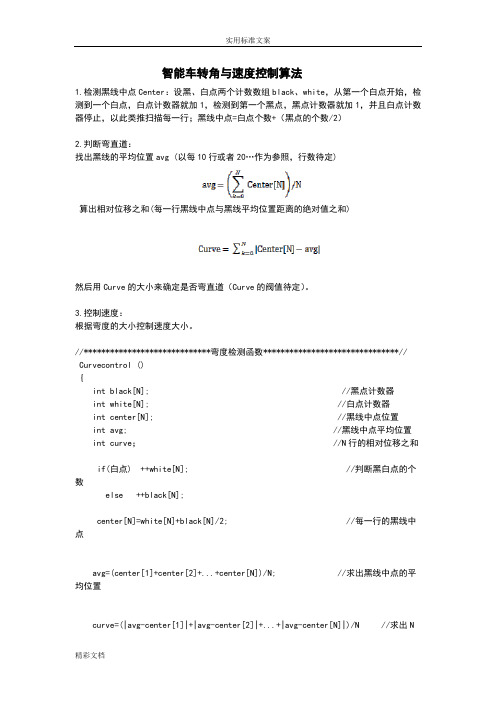
智能车转角与速度控制算法1.检测黑线中点Center:设黑、白点两个计数数组black、white,从第一个白点开始,检测到一个白点,白点计数器就加1,检测到第一个黑点,黑点计数器就加1,并且白点计数器停止,以此类推扫描每一行;黑线中点=白点个数+(黑点的个数/2)2.判断弯直道:找出黑线的平均位置avg (以每10行或者20…作为参照,行数待定)算出相对位移之和(每一行黑线中点与黑线平均位置距离的绝对值之和)然后用Curve的大小来确定是否弯直道(Curve的阀值待定)。
3.控制速度:根据弯度的大小控制速度大小。
//*****************************弯度检测函数*******************************// Curvecontrol (){int black[N]; //黑点计数器int white[N]; //白点计数器int center[N]; //黑线中点位置int avg; //黑线中点平均位置int curve; //N行的相对位移之和if(白点) ++white[N]; //判断黑白点的个数else ++black[N];center[N]=white[N]+black[N]/2; //每一行的黑线中点avg=(center[1]+center[2]+...+center[N])/N; //求出黑线中点的平均位置curve=(|avg-center[1]|+|avg-center[2]|+...+|avg-center[N]|)/N //求出N行的相对位移之和return curve; //返回弯度大小}//*****************************舵舱转角控制函数******************************////****黑线轨迹会指引小车的行驶方向,所以向左还是向右是由黑线决定的。
********// //****设0为小车正向行驶,-10为向左的最大转角,+10为向右的最大转角。
自动往返小车设计

题目自动往返小车设计目录自动往返小车设计一、方案的选择与论证根据题目要求,系统可以划分为几个基本模块,如图 1所示。
图 1对各模块的实现,分别有以下一些不同的设计方案:1. 电动机驱动调速模块方案一:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。
但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。
更主要的问题在于一般电动机的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。
方案二:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整。
这个方案的优点是电路较为简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命较短、可靠性不高。
方案三:采用由达林顿管组成的H型PWM电路。
用单片机控制达林顿管使之工作在占空比可调的开关状态,精确调整电动机转速。
这种电路由于工作在管子的饱和截止模式下,效率非常高;H型电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调速技术。
基于上述理论分析,拟选择方案三。
2. 路面黑线探测模块探测路面黑线的大致原理是:光线照射到路面并反射,由于黑线和白纸的反射系数不同,可根据接收到的反射光强弱判断是否到达黑线。
方案一:可见光发光二极管与光敏二极管组成的发射-接收电路。
这种方案的缺点在于其他环境光源会对光敏二极管的工作产生很大干扰,一旦外界光亮条件改变,很可能造成误判和漏判;虽然采取超高亮发光管可以降低一定的干扰,但这又将增加额外的功率损耗。
方案二:不调制的反射式红外发射-接收器。
由于采用红外管代替普通可见光管,可以降低环境光源干扰;但如果直接用直流电压对管子进行供电,限于管子的平均功率要求,工作电流只能在1OM左右,仍然容易受到干扰。
方案三:脉冲调制的反射式红外发射-接收器。
考虑到环境光干扰主要是直流分量,如果采用带有交流分量的调制信号,则可大幅度减少外界干扰;另外,红外发射管的最大工作电流取决于平均电流,如果使用占空比小的调制信号,在平均电流不变的情况下,瞬时电流可以很大(50-100mA),这样也大大提高了信噪比。
智能车控制算法
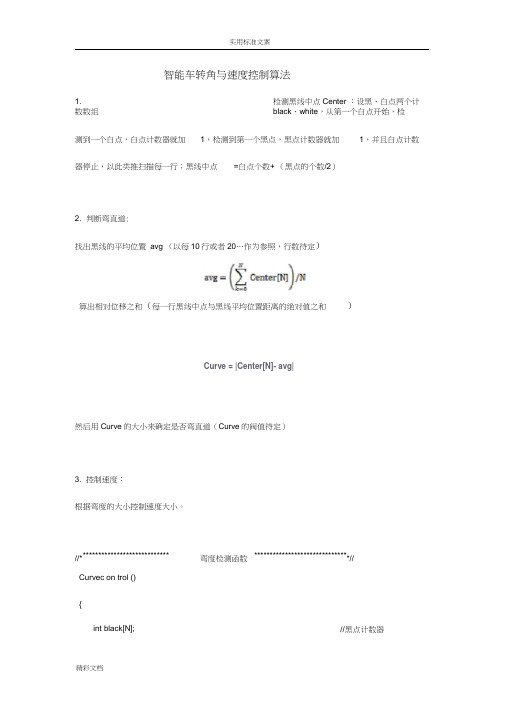
智能车转角与速度控制算法1.检测黑线中点Center :设黑、白点两个计数数组black 、white ,从第一个白点开始,检测到一个白点,白点计数器就加1,检测到第一个黑点,黑点计数器就加1,并且白点计数器停止,以此类推扫描每一行;黑线中点=白点个数+ (黑点的个数/2)2. 判断弯直道:找出黑线的平均位置 avg (以每10行或者20…作为参照,行数待定)算出相对位移之和(每一行黑线中点与黑线平均位置距离的绝对值之和 )Curve = |Center[N]- avg|然后用Curve 的大小来确定是否弯直道(Curve 的阀值待定)3. 控制速度:根据弯度的大小控制速度大小。
Curvec on trol () {int black[N];//***************************** 弯度检测函数 *******************************// //黑点计数器int white[N];int cen ter[N];int avg;int curve ;if(白点)++white[N];else ++black[N];center[N]=white[N]+black[N]/2;占八、、//白点计数器//黑线中点位置//黑线中点平均位置//N行的相对位移之和//判断黑白点的个数//每一行的黑线中avg=(ce nter[1]+ce nter[2]+...+center[N])/N;//求出黑线中点的平均位置curve=(|avg _cen ter[1]|+|avg-ce nter[2]|+...+|avg _center[N]|)/N的相对位移之和//求出N行return curve;}//返回弯度大小//****黑线轨迹会指引小车的行驶方向,所以向左还是向右是由黑线决定的。
********〃//****设0为小车正向行驶,-10为向左的最大转角,+10为向右的最大转角。
大学智能小车课程设计

大学智能小车课程设计一、课程目标知识目标:1. 掌握智能小车的基本组成、工作原理及各部分功能;2. 学习并理解智能小车编程所需的基础知识,如传感器数据处理、控制算法等;3. 了解智能小车在现实生活中的应用场景及其发展前景。
技能目标:1. 能够独立完成智能小车的组装和调试;2. 学会使用相关编程软件,编写简单的控制程序,实现对智能小车的控制;3. 培养动手实践能力、团队协作能力和问题解决能力。
情感态度价值观目标:1. 培养学生对智能小车及机器人技术的兴趣,激发学习热情;2. 培养学生勇于尝试、不断探索的精神,增强自信心;3. 培养学生关注科技发展,认识到智能小车在现实生活中的重要意义,树立正确的价值观。
课程性质:本课程为实践性较强的课程,注重理论知识与实际操作相结合,培养学生动手实践能力和创新能力。
学生特点:大学年级学生已具备一定的理论基础和动手能力,对新技术有较高的兴趣和求知欲。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,强调实践操作,引导学生主动参与,培养实际操作能力和团队协作能力。
在教学过程中,关注学生的个体差异,因材施教,确保每个学生都能达到课程目标。
通过课程学习,使学生具备智能小车相关领域的基本知识和技能,为未来进一步学习和研究打下基础。
二、教学内容1. 智能小车概述:介绍智能小车的基本概念、发展历程、应用领域及发展趋势。
- 教材章节:第一章 智能小车概述- 内容安排:1课时2. 智能小车硬件组成:讲解智能小车的各部分硬件,如电机、传感器、控制器等。
- 教材章节:第二章 智能小车硬件组成- 内容安排:2课时3. 智能小车编程基础:学习编程语言、传感器数据处理、控制算法等基础知识。
- 教材章节:第三章 智能小车编程基础- 内容安排:4课时4. 智能小车组装与调试:指导学生动手组装智能小车,并进行调试。
- 教材章节:第四章 智能小车组装与调试- 内容安排:3课时5. 智能小车控制程序编写:教授如何使用编程软件,编写简单的控制程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.本科毕业设计(论文)题目:倒退行走式智能车速度控制算法设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部容。
作者签名:日期:学位论文原创性声明本人重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日倒退行走式智能车速度控制算法设计摘要本文根据飞思卡尔智能车大赛规则,设计了倒退行走式摄像头智能车的速度控制系统,使智能车能够在赛道上稳定运行。
智能车采用飞思卡尔公司的9S12XSMAA单片机为核心控制器,配合有相应的硬件及H桥电机驱动电路,利用光电编码器测速形成一个闭环负反馈速度控制系统。
通过设计及调整智能车的机械结构和硬件电路图,编写控制系统C语言程序,对电机转速和舵机转角分别采用用增量式PID控制算法和位置式PD控制算法,从而实现对智能车的速度控制。
本文还增加了直道加速、弯道减速的速度控制算法,并且采用了上位机与蓝牙相结合的方式对智能车车速进行调试,以寻求最优的PID控制系统参数。
通过测试,智能车最终能以1.8m/s的速度平稳地通过赛道。
关键词: 9S12XSMAA;PID控制;电机控制;舵机控制;H桥电机驱动电路Walking backwards smart car speed control algorithmdesignAbstractIn the background of the Freescale Smart Car Competition, for the regressive group car camera design and image processing algorithms are discussed and research. Smart car through the OV7620 camera capture images using edge detection algorithms to identify the black line, with the active edge to strike the track centerline. Invalid filtered centerline of the calculated center of each line bias, and the track of the overall slope, intercept. Based on the deviation and the slope, the completion of the servo motor PD control and PID control, and track type identification, determine the specific control scheme. Upon completion of the mechanical structure of the smart car modification and hardware system design, through actual testing, constantly optimize the speed of rotation of image processing and control algorithms.Keywords:Image processing; Camera sensors; Path recognition; PID control目录第1章引言 (1)1.1 飞思卡尔智能车的背景 (1)1.2 整体思路和总体介绍 (1)第2章车模系统机械设计 (2)2.1 差速器 (2)2.2 车轮定位 (3)2.3 舵机的安装 (6)第3章智能车硬件电路设计 (7)3.1 9S12XSMAA最小系统 (8)3.2 电源管理模块 (9)3.2.1 12V稳压电路 (10)3.2.2 TPS7350Q稳压电路 (12)3.2.3 LM2940稳压电路 (13)3.3 电机驱动模块 (13)3.4 速度反馈模块 (15)第4章智能车速度控制软件设计 (17)4.1 速度控制整体程序框架 (17)4.2 编译开发环境 (17)4.3 控制策略 (18)4.3.1 经典PID控制介绍 (19)4.3.2 位置式PID算法 (20)4.3.3 增量式PID算法 (20)4.3.4 控制器参数整定 (21)4.4 智能车的速度控制 (21)4.5 智能车的转向控制 (22)第5章系统调试 (24)5.1 整体性能分析调试 (24)5.2 单纯PID控制性能分析 (26)第6章结论 (31)致 (33)参考文献 (34)附录 (35)第1章引言1.1 飞思卡尔智能车的背景随着现代科技的发展,汽车的数量越来越多,由此引发的汽车拥堵、车祸等一系列安全问题引起人们的重视。
人们对汽车的智能化有了越来越高的要求,汽车生产商也推出越来越智能化的汽车来满足各种各样的市场要求。
汽车的电子化已成为行业发展的必然趋势,它包括了汽车电子控制装置,通过电子装置控制汽车发动机、车身、动力转向系统以及制动防抱死等。
汽车电子的迅速发展必将满足人们逐步增长的对于安全、节能、环保以及智能化和信息化的需求。
“飞思卡尔杯”智能汽车是以自动导航技术、汽车电子技术为背景,涉及自动控制、计算机、机械等多个学科。
采用飞思卡尔公司16位单片机9S12XSMAA作为核心控制器,控制系统包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发等。
摄像头组智能车是搭建基于视觉导航的智能汽车系统,通过摄像头对赛道图像的有效采集,然后再利用控制器进一步进行处理信息,作出相应的决策,控制小车寻迹。
黑白边沿这种视觉寻迹系统以其灵活、信息量大等优势成为了未来的寻迹发展方向,在将来智能汽车电子应用上有非常广大的发展空间。
1.2 整体思路和总体介绍本文分章节介绍了智能车系统用于速度控制的各个模块,包括智能车机械结构的设计及调整、智能车系统架构及其硬件设计、智能车速度控制软件设计方案和系统调试。
本智能车采用飞思卡尔公司的9S12XSMAA单片机为核心控制器,配合有相应的硬件及驱动电路,组成一个自动控制系统,由摄像头传感器、信息处理、控制算法和执行机构组成。
“飞思卡尔杯”智能汽车竞赛赛道用专用的白色KT基板制作,赛道两边有黑线。
赛道分为直道、小S虚线弯道、路障区、十字路口、上坡与下坡道路等,在控制算法上,采用位置式PD和增量式PID控制舵机和电机,窗口算法采集处理跑道,控制转速和转向,实现智能车直道加速、路障区和下坡路道减速等速率变化控制。
第2章车模系统机械设计模型车的机械机构和组装形式是整个模型车身的基础,机械结构的好坏对智能车的运行速度有直接的影响。
经过大量的实验经验可以看出,机械结构决定了智能车的上限速度,而软件算法的优化则是使车速不断接近这个上线速度,软件算法只有在精细的机械结构上才能够更好的提高智能车的整体性能。
2.1 差速器差速器处于传动轴与左右半轴的交汇点,从变速箱输出的动力在这里被分配到左右两个半轴。
汽车在直线行驶时左右两个驱动轮的转速是相同的,由于在转弯时两边车轮的行驶距离不相等,因此两边车轮的转速也不相等。
差速器的作用就在于允许左右两边的驱动轮以不同的转速运行。
图2-1车辆直线行驶差速器状态智能车直线行驶的时候左右两边驱动轮受到的阻力大致相同,发动机输出的动力首先传送到差速器壳体上使差速器的壳体开始转动,然后把动力从壳体传递到左右半轴上,由于两边车轮受到的阻力相同,因此差速器壳体的行星齿轮跟着壳体公转时不会产生自转,两个行星齿轮咬合这两个半轴齿轮以相同的速度转动,这样智能车就能直线行驶。
[1]图2-2 一侧车轮遇到阻力差速器壳体通过齿轮和输出轴相连,在传动轴转速不变情况下差速器壳体的转速也不变,假设智能车现在向左转,左侧的车轮行驶的距离短,左侧驱动轮会受到更大的阻力。
因此左侧半轴齿轮的转速会比差速器壳体的转速小,行星齿轮带动左侧半轴会更费力,这时行星齿轮会产生自转,把更多的扭矩传递到右侧齿轮半轴上。
行星齿轮的公转加自身的自转将导致右侧半轴齿轮会在差速器壳体转速的基础上增速,因此右侧车轮比左侧车轮转得快,从而实现智能车顺利通过左弯道。
2.2 车轮定位智能车在正常行驶过程中,为了使汽车直线行驶稳定,转向轻便,转向后能自动回正,减少轮胎和转向系零件的磨损等,在转向轮、转向节和前轴之间形成一定的相对安装位置,叫这轮定位,其主要参数有:前轮前束、前轮外倾、后轮外倾。
(1)前轮前束图2-3 前轮约束示意图前轮前束是指两轮后边缘距离A与前边缘距离R之差。
图2-4 前轮前束Toe角度(束角)是描述从车的正上方看,车轮的前段和车辆纵线的夹角。
车轮前端向倾(八字),称为Toe_in;车轮前轮向外倾(外八字),称为Toe_out。
当车轮有了外倾角后,在滚动时就类似于圆锥滚动,从而导致两侧车轮向外滚开。
由于转向横拉杆和车桥的约束使车轮不可能向外滚开,车轮将在地面上出现滚边向滑移的现象,从而增加了轮胎的磨损。
在安装车轮时,可以使两轮的前边缘距离R小雨后边缘距离A,从而使轮胎滚动时的偏斜方向抵消,轮胎外侧磨损的现象将会减少。
[2] Toe角度的大小会影响智能车的转向反应速度和直道行驶的稳定性。