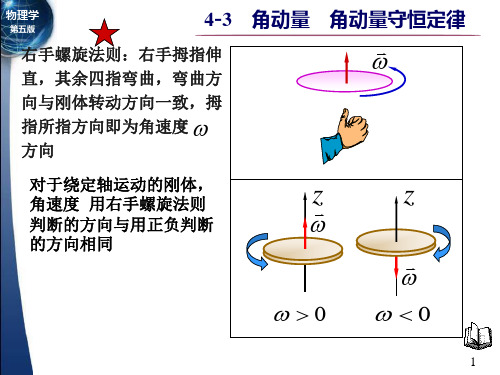
5-3 角动量相加
角动量及其守恒定律

m r2 r1 J0
22
因为 1 2, 1 1 2 E k 1 J 1 1 ( J 1 1 ) 1 2 2 相 E k1 E k 2 等 1 1 2 E k 2 J 2 2 ( J 2 2 ) 2 2 2 即系统的机械能不守恒。
23
人双臂收回过程中,内力做功,
J 2
l/2
r dr
2
1 12
l
3
0
1 12
ml
2
如转轴过端点垂直于棒 l 1 2 J r d r ml 2 0 3
例3 一质量为 m 、半径为 R 的均匀圆盘,求通 过盘中心 O 并与盘面垂直的轴的转动惯量 .
解 设圆盘面密度为 , 在盘上取半径为 r ,宽为 d r 的圆环
v M (2 gh )
u l 2
1 2
M
h N
B
l 2 1 12
2
2
把M、N和跷板作为 一个系统, 角动量守恒
mvM l 2 J 2 mu
C l
m l 1 2 1 6 m ( 2 gh )
A l/2
ml
2
解得
mvMl 2 m l
2
2
12 ml
2
2 2 2
质量连续分布刚体的转动惯量
J
m
j
j j
r
2
r dm
2
d m :质量元
例2 一质量为 m 、长为 l 的均匀细长棒,求 通过棒中心并与棒垂直的轴的转动惯量 .
O
l 2
O
dr
l 2
r
dr
O´
角动量公式大全
角动量公式大全
1. 质点的角动量。
- 对于质点,角动量→L=→r×→p,其中→r是质点相对于参考点的位置矢量,→p = m→v是质点的动量(m为质点质量,→v为质点的速度)。
- 在直角坐标系下,如果→r=(x,y,z),→p=(p_x,p_y,p_z),则L_x = yp_z -
zp_y,L_y=zp_x - xp_z,L_z = xp_y - yp_x。
2. 刚体定轴转动的角动量。
- 对于刚体绕定轴转动,角动量L = Iω,其中I是刚体对该轴的转动惯量,ω是刚体绕轴转动的角速度。
- 对于由多个质点组成的刚体,I=∑_im_ir_i^2(离散质点情况),对于质量连续分布的刚体,I=∫ r^2dm,这里r是质点到转动轴的垂直距离。
3. 角动量定理相关公式。
- 角动量定理→M=(d→L)/(dt),其中→M是合外力矩。
- 在刚体定轴转动中,M = Iα(α为角加速度),这是由M=(dL)/(dt)(L =
Iω)推导而来,因为(dL)/(dt)=I(dω)/(dt)=Iα。
4. 角动量守恒定律。
- 当→M=0时,→L=常量。
- 在刚体定轴转动中,如果合外力矩为零,则Iω=常量,例如在花样滑冰运动员旋转时,收缩手臂(I减小),则ω增大以保持角动量守恒。
角动量变化定理与角动量守恒
2
2
2
这里,被积函数只是r 的函数,积分值仅与起点位置
和终点位置有关,而与积分路径无关。
(2) 运动方程 m&rr& = F err
(2)
由(1)得
υ
= υ 0r0 sin θ R
= 4υ 0 sin θ
代入(2)式得
1
sin θ
=
1 4
⎛⎜⎜⎝
1
+
3GM 2Rυ02
⎞⎟⎟⎠
2
1
1
则
υ
=
4υ 0
×
1 4
⎜⎜⎝⎛1 +
3GM 2Rυ02
⎟⎟⎠⎞
2
= υ0⎜⎜⎝⎛1 +
3GM 2Rυ02
⎟⎟⎠⎞
2
15
▲
星 云 具 有 盘 形 结 构:旋
r M i外 =
rri
×
r Fi
∑ ∑ ∑ r
M内 =
ir
i
M i内 =
( rri ×
r f ij )
i
i
j≠i
因为一对内力的力矩之和为零
∴
∑ r
M内 =
r M i内 = 0
i
19
理学院 物理系 陈强
第5章 角动量变化定理与角动量守恒
于是有:
r M
外
=
r dL dt
r (M
外和
Lr都对同一点)
──质点组的角动量变化定理(微分形式)
2
理学院 物理系 陈强
第5章 角动量变化定理与角动量守恒
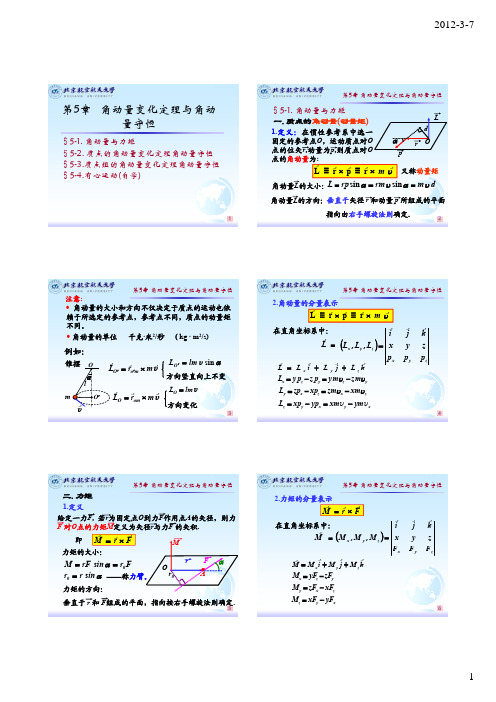
注意: • 角动量的大小和方向不仅决定于质点的运动也依 赖于所选定的参考点,参考点不同,质点的动量矩 不同。
第五章 角动量角动量守恒定理解读
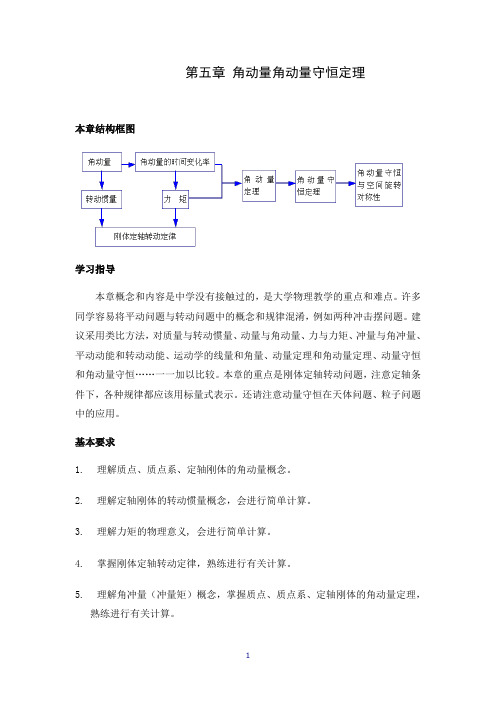
第五章角动量角动量守恒定理本章结构框图学习指导本章概念和内容是中学没有接触过的,是大学物理教学的重点和难点。
许多同学容易将平动问题与转动问题中的概念和规律混淆,例如两种冲击摆问题。
建议采用类比方法,对质量与转动惯量、动量与角动量、力与力矩、冲量与角冲量、平动动能和转动动能、运动学的线量和角量、动量定理和角动量定理、动量守恒和角动量守恒……一一加以比较。
本章的重点是刚体定轴转动问题,注意定轴条件下,各种规律都应该用标量式表示。
还请注意动量守恒在天体问题、粒子问题中的应用。
基本要求1.理解质点、质点系、定轴刚体的角动量概念。
2.理解定轴刚体的转动惯量概念,会进行简单计算。
3.理解力矩的物理意义, 会进行简单计算。
4.掌握刚体定轴转动定律,熟练进行有关计算。
5.理解角冲量(冲量矩)概念,掌握质点、质点系、定轴刚体的角动量定理,熟练进行有关计算。
6.掌握角动量守恒的条件,熟练应用角动量守恒定律求解有关问题。
内容提要1.基本概念刚体对定轴的转动惯量:是描述刚体绕定轴转动时,其转动惯性大小的物理量。
定义为刚体上每个质元(质点、线元、面元、体积元)的质量与该质元到转轴距离平方之积的总和。
即:I的大小与刚体总质量、质量分布及转轴位置有关。
质点、质点系、定轴刚体的角动量:角动量也称动量矩,它量度物体的转动运动量,描述物体绕参考点(轴)旋转倾向的强弱。
表5.1对质点、质点系、定轴刚体的角动量进行了比较。
表5.1质点、质点系和定轴刚体的角动量力矩:力的作用点对参考点的位矢与力的矢积叫做力对该参考点的力矩(图5.1):即:大小:(力×力臂)方向:垂直于决定的平面,其指向由右手定则确定。
对于力矩的概念应该注意明确以下问题:•区分力对参考点的力矩和力对定轴的力矩:力对某轴的力矩是力对轴上任意一点的力矩在该轴上的投影。
例如:某力对x、y、z轴的力矩就是该力对原点的力矩在三个坐标轴上的投影:由上可知:力对参考点的力矩是矢量,而力对定轴的力矩是代数量。
4-3+角动量+角动量守恒定律-new概论
思考:
1.动能是否守恒? 2.动量是否守恒? 3.角动量是否守恒?
20
例题
例4:卫星绕地球沿椭圆轨道运行,地球的 中心位于椭圆的一个焦点上,地球 R=6378km,卫星距地面的最近距离 h1=439km, 最远距离h2=2384km,卫星 在近地点 A1的速度v1=8.10km/s,求: 卫星在远地点A2的速度 v2.
本节内容 力的时间累积效应:
冲量、动量、动量定理. 力矩的时间累积效应:
冲量矩、角动量、角动量定理.
1
质点的角动量
质 量为m 的质点以 速度 v 在空间运动,某 时对 O 的位矢为 r,质
点对O 的角 动量 L r p r mv
x L
大小 L rmvsin
L
的方向符合右手法则
zL
22
刚体定轴转动的角动量
将刚体视为质点系处理,
对每一个质点有 Li miri
2
z
对整L 个刚体m求i和ri 2
i
(
miri2 )
O ri
vi
mi
i
刚体的转动惯量
刚体的角动量
L
J
23
刚体定轴转动的角动量定理
质M点i mi受ddL合ti 力 d矩(dMJti()包括ddMt (iemx、iri
v
rm
o
y
v
r
2
质点角动量的说明
1.
L的方 向垂直于
r
和
p所决定的平面。
2. r p的顺序不能颠倒。
3. 必须小于180o。
4. 角动量单位:kg·m2·s-1
3
质点角动量的性质
1. 矢量性 Lrp
4-3角动量 角动量守恒定律

第四章 刚体的转动
v v v M = r ×F
Z
v L
M =0 v v v L=r×p L = rmυ sin 90 = mr ω = Jω
0 2
v p
o
守恒
r
m v
行星绕太阳、卫星绕地球的椭圆轨道运动 行星绕太阳、卫星绕地球的椭圆轨道运动——行星 行星 对太阳、 对太阳、卫星对地球的角动量守恒
第四章 刚体的转动 二 刚体定轴转动的角动量定理和角动量守恒定律 1 刚体定轴转动的角动量
内力矩可以改变系统各组成部分 的角动量, 的角动量,但不能改变系统的总 角动量
在冲击等问题中 冲击等问题中
Q M >> M
in
ex
∴L ≈C
角动量守恒定律是自然界的一个基本定律. 角动量守恒定律是自然界的一个基本定律
4 – 3 角动量 角动量守恒定律
第四章 刚体的转动
一物体正在绕固定光滑轴自由转动, (A)它受热膨胀或遇冷收缩时,角速度不变。 (B)它受热时角速度变大,遇冷时角速度变小。 (C)它受热膨胀或遇冷收缩时,角速度均变大。 (D)它受热时角速度变小,遇冷时角速度变大。
m v
如果力的作用线通过固定点: 如果力的作用线通过固定点 M=0 O
F
4 – 3 角动量 角动量守恒定律
第四章 刚体的转动
v v dL M= dt
∫
t2
t1
v v v M d t = L2 − L1
冲量矩
∫t1
t2
v M dt
质点的角动量定理: 质点的角动量定理:对同一参考点 O ,质点所受 的冲量矩等于质点角动量的增量. 的冲量矩等于质点角动量的增量 3 质点的角动量守恒定律
43角动量角动量守恒定律
r
F
dL
M
dt dt
dt
14
物理学
第五版
质点的合外力矩
4-3 角动量
M
dL
dt
角动量守恒定律
作用于质点的合外力对参考点 O 的力矩,等于质点对 该点 O 的角动量随时间的变化率.
2 质点的角动量定理
t2 t1
Mdt
L2
L1
冲量矩
t2
M
dt
t1
3 质点的角动量守恒定律
M 0 , L 恒矢量
做匀变速转动.
与二维平面圆周 运动情况相同
质点匀变速直线运动 刚体绕定轴作匀变速转动
v v0 at
0 t
x
x0
v0t
1 2
at 2
0
0t
1 2
t
2
v2
v02 2a(x x0 )
2
2 0
2 (
0
)
3
物理学
第五版
4-3 角动量 角动量守恒定律
三 角量与线量的关系
ω d
dt
dω dt
4-3 角动量 角动量守恒定律
对定轴转的刚体,受合外力矩M,从t1到t2内,角速度
M从 1变d(为J)2, 积dL分可得: dt dt
t2 t1
Mdt
L2
L1
冲量矩 J2 J1
刚体的角动量定理: 刚体绕定轴转动时,刚体的冲量矩等 于角动量的增量
非刚体定轴转动的角动量定理
了解
t2
t1
Mdt
J 22
i
i
L J
2 M刚 i体定dd轴Lti 转动ddt的(m角ir动i2量)定理
O ri
02-5 角动量及角动量定理
和质量分布有关; (2)Jz 和质量分布有关;
i
Jz = ∑∆mi ri
2
(1)转动惯量是转动惯性大小的量度 和转轴有关, (3)Jz 和转轴有关,同一个物体对不同转轴的转 动惯量不同。 动惯量不同。
2-5 角动量及角动量定律
试一试:由牛顿方程推出刚体定轴转动定律 试一试: 对刚体中任一质量元 ∆m i
2-5 角动量及角动量定律
3.刚体定轴转动中的角动量定律—转动定律 3.刚体定轴转动中的角动量定律— 刚体定轴转动中的角动量定律
dpz dm dvz Fz = = vz + m = maz Fz = maz dt dt dt dLz dJz dω Mz = =ω + Jz = Jz β Mz = Jz β dt dt dt
λ = m/ L
L 2
A L A L/2 C L/2
B X B X
2
1 2 J A = ∫ x λdx = mL 0 3 L 1 2 2 2 JC = ∫ Lx λdx = mL −2 12
平行轴定理
1 2 L 2 JA = mL + m = JC + mdc 12 2
•试一试:证明平行轴定理 试一试: 试一试
• 质点系的角动量:质点系对给定参考点的角动量, 质点系的角动量:质点系对给定参考点的角动量, 等于各质点对该参考点的角动量的矢量和, 等于各质点对该参考点的角动量的矢量和,即
L = ∑Li = ∑ri × pi = ∑ri ×mivi
dpi dL = ∑ri × = ∑ri ×( fei + fii ) = Me + Mi dt dt
α m
v
α
r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ˆ 2 j , m j j 1 J ˆ j, m m J z
也可以将升降算符的作用写为
2
j, m
j, m
(2)
ˆ j, m J ˆ j, m J
j m j m 1 j m j m 1
j, m 1 j, m 1
(3) (4)
(26)
ˆ 相应的升降算符 引入与 J
ˆ J ˆ iJ ˆ , J x y
根据(12)和(20)式可知
ˆ J ˆ iJ ˆ J x y
(27)
ˆ J ˆ J ˆ , J 1 2
ˆ 写为 类似于(13)和(14)式,可以将 J
2
ˆ J ˆ J ˆ J 1 2
Jˆ
2
ˆ J ˆ J ˆ J 2 1z 2 z
(30)
将(30)式代入(25)式,得
5-3 角动量相加
~5~
ˆ2 J ˆ J ˆ J 1 2
2
2
ˆ2 J ˆ 2 2J ˆ J ˆ ˆ ˆ ˆ ˆ J 1 2 1z 2 z J1 J 2 J1 J 2
2
(31)
ˆ 对易,但 J ˆ 与J ˆ 与J ˆ 均不对易 ˆ 、J 注意,虽然 J z 2z 1z
ˆ2 ˆ J , J1z 0,
比如,根据(25)式
ˆ2 ˆ J , J2z 0
(32)
ˆ2 ˆ ˆ2 ˆ2 ˆ ˆ ˆ ˆ2 ˆ2 ˆ J ˆ ˆ ˆ , J1z J1 J 2 2J1 J 2 , J1z J1 J 2 , J1z 2 J1 J 2 , J1z ˆ ,J ˆ 0 ,并利用(16)式,可得 由于 J 1 1z
(11)
ˆ 分别表示与 J ˆ 和J ˆ 和J ˆ 相应的升降算符 用J 2 1 1 2
ˆ J ˆ iJ ˆ , J 1 1x 1y ˆ J ˆ iJ ˆ , J 2 2x 2y
根据“角动量理论”这一节的结果
ˆ J ˆ iJ ˆ J 1 1x 1y ˆ J ˆ iJ ˆ J 2 2x 2y
ˆ ,J ˆ ,J ˆ 满足如下对易关系 根据(10)和(15)式,可以证明 J x y z
(20)
5-3 角动量相加
~4~
ˆ ˆ ˆ J i , J j i ijk J k
证明如下:利用(10)和(16)式
(21)
ˆ ˆ ˆ ˆ ˆ ˆ J i , J j J1i J 2i , J1 j J 2 j ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ J1i , J1 j J1i , J 2 j J 2i , J1 j J 2i , J 2 j ˆ i J ˆ i J
(35)
ˆ ,J ˆ 0 ,这正是(23)式的结果。 将(34)和(35)式相加,可得 J z
2
ˆ 与J ˆ 和J ˆ 的任何分量均不对易 实际上, J 1 2
2
ˆ2 ˆ ˆ ˆ ˆ ˆ ˆ J ˆ ˆ ˆ , J1i 2 J1k J 2 k , J1i 2 J1k , J1i J 2 k 2i kij J1 j J 2 k 0 ˆ2 ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ J , J 2i 2 J1k J 2k , J 2i 2 J1k J 2k , J 2i 2i kij J1k J 2 j 0
k , j 中的作用时,不必声明 k 的取值。 k , j 中讨论角动量算符对态矢量的作用时,我们可以将基
根据以上分析,在子空间
矢量 k , j , m 简记为 j , m , 只要记住讨论中涉及的所有态矢量属于同一子空间即可。 比如写为 ˆ 和J 可以将 J z
1. 记号的简化
ˆ 之外,通常还需要一个或多个与 J ˆ 和J ˆ 和 如前所述,要构成态空间的 CSCO,除了 J z
2 2
ˆ, J ˆ 对易的观察算符。为了简单起见,我们假定只需要补充一个观察算符。设 A ˆ2, J ˆ 构 J z z ˆ, J ˆ2, J ˆ 的共同本征矢量 k , j, m 的集合构成态空间 成态空间的 CSCO, A z
在“态空间的张量积”这一节讲过,如果两个算符属于不同空间,则它们的延伸算符是 互相对易的,因此下标为 1 的算符与下标为 2 的算符均对易,比如
ˆ ˆ ˆ ˆ ˆ ˆ A 1 , A2 A1 , J 2i A2 , J1i 0 ˆ ˆ ˆ2 ˆ ˆ2 ˆ ˆ2 ˆ2 J 1i , J 2 j J1 , J 2i J 2 , J1i J1 , J 2 0
中的一个基。
对于固定的 k , j , 2 j 1 个基矢量 k , j , m 的线性叠加构成一个 2 j 1 维子空间,记为
k , j 。为了避免记号难看,我们不用 k , j 的直和
k, j
这样的记号。态空间
可以看作是各个子空间
k, j
(1)
ˆ 的三个分量算符 ˆ 是一个标量算符,即 A ˆ 与J 根据“角动量理论”这一节,如果 A
量 k , j, m , 只将 m 值加 1 或减 1, 而 k , j 保持不变, 因此仍然属于子空间
同一个 j 值、不同 k 值的所有子空间,维数都是 2 j 1 ,与 k 无关。此外,在升降算符相 关的递推关系中,基矢量之间的比例系数只跟 j, m 有关,也与 k 无关。因此,在讨论角动 量算符在子空间
1
ˆ I ˆ 理解为 A ˆ, ˆ 比如, 算符 A 1 2 其中 I 2 是 1
2
ˆ 理解为 I ˆ ˆ J ˆ , 中的单位算符;J 2z 1 2 z 其中 I1 是
中的单位算符,等等。实际上,只要明白这个算符原来属于哪个空间,将其作用于原来属于 该空间的态矢量上即可,比如
ˆ k ,k , j , j ,m ,m J ˆ k , j ,m J 1z 1 2 1 2 1 2 1z 1 1 1
ˆ ,J ˆ ,J ˆ 均对易, ˆ ,J ˆ ,J ˆ 及其线性组合算符作用于子空间 则J J x y z x y z
所得到的态矢量仍然属于子空间
k , j 的基矢量 k , j, m
,
k , j 。比如,用磁量子数 m 的升降算符 Jˆ 作用于基矢 k , j 。注意,
k , j ,m
2 2
2
(8) (9)
ˆ k ,k , j , j ,m ,m k , j ,m A ˆ k , j ,m A 2 1 2 1 2 1 2 1 1 1 2 2 2 2
等等。
5-3 角动量相加
~3~
3. 对易关系
ˆ 和J ˆ 作为 中的延伸算符,仍然满足对易关系 J 1 2
中的基矢量的张量积 (7)
k1 , k2 , j1 , j2 , m1 , m2 k1 , j1 , m1 k2 , j2 , m2
集合 k1 , k2 , j1 , j2 , m1 , m2 原来属于
1或 2
构成
中的基。
中的算符, 在用于张量积空间
1
自动理解为其延伸算符。 2 时,
2
(33)
ˆ2 ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ J ˆ ˆ , J1z 2 J1x J 2 x J1 y J 2 y , J1z 2i J1 y J 2 x 2i J1x J 2 y 0
同样可以得到
(34)
ˆ2 ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ J ˆ ˆ , J 2 z 2 J1x J 2 x J1 y J 2 y , J 2 z 2i J1x J 2 y 2i J1 y J 2 x 0
在经典力学中,如果两个粒子的角动量分别为 J1 和 J 2 ,则二者的总角动量为
(15) (16)
J =J1 J 2
量子力学中的关系是完全相同的,只是将(17)式换成算符表达式
(17)
ˆ =J ˆ J ˆ J 1 2
注意, (18)式中的算符都是张量积空间 和
2
1
(18)
2 中的算符。 1 和
根据矢量表达式(18)
(24)
ˆ2 J ˆ J ˆ J 1 2
2
ˆ2 J ˆ 2 2J ˆ J ˆ J 1 2 1 2
(25)
ˆ J ˆ J ˆ J ˆ ,因此(25)式中交叉项可以写为 2 倍。此外由(16)式可知 注意根据(16)式, J 1 2 2 1
ˆ2 ˆ2 ˆ2 ˆ2 J , J1 J , J 2 0
(28)
ˆ2 1 J ˆ J ˆ ˆ ˆ ˆ2 J J J J z 2
此外,根据(12)式可知
(29)
ˆ J ˆ J ˆ J ˆ ˆ ˆ ˆ ˆ J 1 2 1 x 2 x J1 y J 2 y J1 z J 2 z 1 ˆ ˆ ˆ J ˆ 1 J ˆ J ˆ J1 J J 1 2 2 1 1 4 4 1 ˆ ˆ ˆ ˆ ˆ ˆ J 1 J 2 J1 J 2 J1 z J 2 z 2
ijk 1k ijk 2k
(22)
ˆ i ijk J k
ˆ ,J ˆ ,J ˆ 满足角动量算符的定义,因此的确是角动量算符,关于角动量算符的 也就是说, J x y z
一切普遍的结果都成立。比如,由(21)式可以证明
ˆ2 ˆ J , Ji 0