平面四足步行机器人结构设计
本科毕业论文---四足步行机器人腿的机构设计(论文)设计
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
四足机器人系统设计
四足机器人系统设计摘要四足机器人作为仿生机器人的一种,得到了广泛的研究。
行走机构和转弯机构是四足机器人最关键的部分,目前,行走机构的研究大多采用在腿机构的关节处安装伺服电机进行驱动,增加了机器人的重量和控制策略的难度。
并且,机器人本体大多是一个刚性整体,转弯机构研究不足。
为此,项目将四足机器人本体作为一个柔性整体,采用三维建模软件Pro/E4.0设计了四足机器人的机械系统,提出了一种新颖的凸轮控制驱动式行走机构,设计了一种腿机构以及相应的凸轮控制驱动机构,并初步设计了柔性转弯机构。
在此基础上,论文采用主从式控制方式设计了四足机器人的控制系统,重点讨论了以8051单片机为控制器的行走机构和转向机构的控制系统设计。
关键词:四足机器人;行走机构;凸轮驱动;控制系统;三维设计Abstract目前,常见的步行机器人以两足式、四足式、六足式应用较多。
其中,四足步行机器人机构简单且灵活,承载能力强、稳定性好,在抢险救灾、探险、娱乐及军事等许多方面有很好的应用前景,其研制工作一直受到国内外的重视。
本文介绍了国内外在机构设计、步态、控制等方面已经取得的进展,并分析了其中的关键技术。
最后,归纳总结了未来四足步行机器人的几个发展趋势]2[,以期对以后的研究工作具有指导作用。
20世纪60年代,四足步行机器人的研究工作开始起步。
随着计算机技术和机器人控制技术的研究和应用,到了20世纪80年代,现代四足步行机器人的研制工作进入了广泛开展的阶段。
世界上第一台真正意义的四足步行机器人是由Frank和McGhee于1977年制作的。
该机器人具有较好的步态运动稳定性,但其缺点是,该机器人的关节是由逻辑电路组成的状态机控制的,因此机器人的行为受到限制,只能呈现固定的运动形式。
20世纪80、90年代最具代表性的四足步行机器人是日本Shigeo Hirose实验室研制的TITAN系列。
1981~1984年Hirose教授研制成功脚部装有传感和信号处理系统的TITAN-III。
四足机器人

四足步行机器人机械本体结构
弹性驱动式实施方案:步行腿中的并联驱动机构和串联驱动机构均采 用伺服电机弹性驱动器驱动,整个动力全部来自电机。
5
4.四足机器人2
四足机器人单腿结构图
机架组件 5、大腿组件 3 和弹性小腿组件 1。 机架组件与大腿组件之间通过髋关节 4 相连, 大腿组件与弹性小腿之间通过膝关节 2 相连。
单足装配模型示意图
3
2.液压驱动足式机器人腿部
足式机器人腿部的机构简图 足式机器人的运动实质上是由EF,IG,JH之间的滑块机构和AE之 间的转动副,驱动AB杆绕A点转动,BC杆绕B点转动,CD绕C点转 动,AE绕Z轴转动,从而使D点相对地面运动,达到行走目的。
4
3.四足机器人1
步行腿结构示意图
14
1.平面并联五杆机构
15
11
9.四足轮腿式结构机器人
四足轮腿式
12
1.“4+2”多足步行机器人
整体图
腿结构主视图
其腿部件由髖关节、大腿关节、小腿关节和踝关节四部分组成,大、 小腿关节之间由线轮传动。
13
10.“4+2”多足步行机器人
1.髖关节:是由上下层布置的两个大且薄的齿轮和连接该两个大齿轮的薄 壁方框组成,其转动则能够带动大腿和小腿整体转动。 2.大腿关节:大腿关节轴由髖关节墙板支撑,采用齿轮传动,传动路线布 置在髖关节框架的上层,大腿围绕第一关节轴转动。 3.小腿关节:小腿关节在大腿关节的最远端。按腿臂融合的功能要求,小 腿关节不但要保证能带动小腿杆转过大腿杆,而且必须实现独立驱动功能。 4.踝关节:要满足多足步行机器人在三维空间的六个运动自由度,就要求 踝关节必须有三个自由度,基于这一要求踝关节采用球铰链形式实现腿脚 的联接。
四足步行机器人结构设计分析

四足步行机器人结构设计分析1. 引言1.1 研究背景四足步行机器人是一种模拟动物四肢步行方式设计的机器人,在各种应用领域有着广泛的应用前景。
随着科技的不断发展,四足步行机器人的结构设计也愈发复杂和精密,因此对其结构设计进行深入研究具有重要意义。
四足步行机器人的研究背景主要包括以下几个方面:四足步行机器人具有在不平整地形环境下运动的能力,可以应用于野外探测、紧急救援等领域;四足步行机器人的结构设计是实现其高效稳定运动的基础,对于提高机器人整体性能至关重要;随着人工智能、机器学习等领域的不断进步,四足步行机器人的智能化和自主化水平也在不断提升,需要不断优化其结构设计。
深入研究四足步行机器人的结构设计对于推动机器人技术的发展、提高机器人的复杂环境适应能力具有重要意义。
通过对四足步行机器人结构设计的分析和研究,可以为未来机器人领域的发展提供更多的思路和方法。
1.2 研究目的1. 分析四足步行机器人结构设计的关键部件,探讨它们在机器人性能中的作用和重要性。
2. 总结四足步行机器人的结构设计原则,包括机械传动系统、传感器系统、智能控制系统等方面的设计要点。
3. 探讨四足步行机器人的结构设计方法,比如模块化设计、优化设计等方法,以提高机器人的稳定性和效率。
4. 通过案例分析不同类型的四足步行机器人,分析其结构设计的优劣之处,提出改进和优化的建议,以及对未来技术发展的展望。
通过对四足步行机器人结构设计的深入研究,希望能够为未来机器人设计和制造提供有益的借鉴和参考,推动机器人技术的进步与发展。
1.3 研究意义四足步行机器人是一种模仿动物四肢运动方式的机器人,具有优良的稳定性和适应性。
其在军事侦察、紧急救援、工业生产等领域具有广阔的应用前景。
四足步行机器人的研究不仅可以提高机器人的运动效率和灵活性,还可以深入挖掘动物运动机制,为生物学研究提供新的思路。
四足步行机器人的研究意义主要体现在以下几个方面:1. 提高工作效率:四足步行机器人具有灵活的运动方式和稳定的机械结构,可以适应不同地形和环境,提高工作效率和生产效益。
四足步行机器人结构设计分析
四足步行机器人结构设计分析【摘要】四足步行机器人是一种重要的机器人形态,具有灵活性和稳定性。
本文主要分析了四足步行机器人的结构设计,并探讨了其运动原理和关键技术。
通过对四足步行机器人的功能、优势、结构组成以及发展趋势的分析,揭示了其在各种应用场景中的潜力和重要性。
研究发现,四足步行机器人结构设计的关键技术对于其性能和效率至关重要。
未来工作应重点关注四足步行机器人结构设计的创新和优化,以满足不同领域的需求。
通过本文的分析和总结,可以为四足步行机器人结构设计提供参考和指导,促进其在工业生产、救灾等领域的应用。
【关键词】四足步行机器人、结构设计、分析、功能、优势、组成、运动原理、关键技术、发展趋势、重要性、研究方向、未来、结语1. 引言1.1 四足步行机器人结构设计分析的重要性四足步行机器人结构设计的优化可以提高机器人的工作效率和性能,使其在工业生产、救援和军事等领域中发挥更大的作用。
通过对机器人结构设计的详细分析,可以找出其优势和不足之处,为进一步改进和提升机器人性能提供参考和指导。
四足步行机器人结构设计分析的重要性在于为机器人的进一步发展提供了重要的理论依据和实践指导,可以不断改进和完善机器人的结构设计,提高其性能和适应性,推动机器人技术的发展和应用。
对四足步行机器人结构设计的深入分析是十分必要和重要的。
1.2 研究背景四足步行机器人是一种模仿动物四肢行走的机器人,具有很高的灵活性和适应性,可以在各种复杂环境下执行任务。
随着人工智能和机器人技术的迅速发展,四足步行机器人在军事、救援、探险等领域具有广阔的应用前景。
要实现四足步行机器人的高效运动和稳定性,必须对其结构进行合理设计和优化。
当前,关于四足步行机器人结构设计的研究主要集中在结构组成、运动原理、关键技术和发展趋势等方面。
通过对四足步行机器人结构的深入分析和探讨,可以更好地了解其运动机理和设计原理,为提高其运动性能和稳定性提供有效的指导和支持。
一种四足行走机器人结构设计
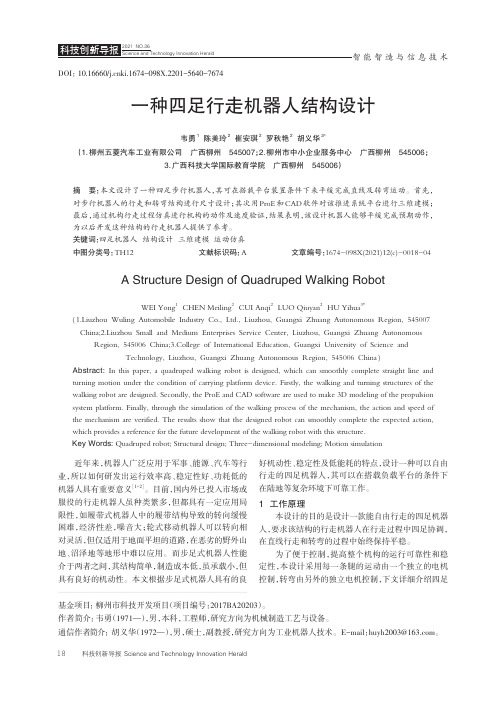
一种四足行走机器人结构设计韦勇1陈美玲2崔安琪2罗秋艳2胡义华3*(1.柳州五菱汽车工业有限公司广西柳州545007;2.柳州市中小企业服务中心广西柳州545006;3.广西科技大学国际教育学院广西柳州545006)摘要:本文设计了一种四足步行机器人,其可在搭载平台装置条件下来平缓完成直线及转弯运动。
首先,对步行机器人的行走和转弯结构进行尺寸设计;其次用ProE和CAD软件对该推进系统平台进行三维建模;最后,通过机构行走过程仿真进行机构的动作及速度验证,结果表明,该设计机器人能够平缓完成预期动作,为以后开发这种结构的行走机器人提供了参考。
关键词:四足机器人结构设计三维建模运动仿真中图分类号:TH12文献标识码:A文章编号:1674-098X(2021)12(c)-0018-04A Structure Design of Quadruped Walking RobotWEI Yong1CHEN Meiling2CUI Anqi2LUO Qiuyan2HU Yihua3*(1.Liuzhou Wuling Automobile Industry Co.,Ltd.,Liuzhou,Guangxi Zhuang Autonomous Region,545007 China;2.Liuzhou Small and Medium Enterprises Service Center,Liuzhou,Guangxi Zhuang Autonomous Region,545006China;3.College of International Education,Guangxi University of Science and Technology,Liuzhou,Guangxi Zhuang Autonomous Region,545006China)Abstract:In this paper,a quadruped walking robot is designed,which can smoothly complete straight line and turning motion under the condition of carrying platform device.Firstly,the walking and turning structures of the walking robot are designed.Secondly,the ProE and CAD software are used to make3D modeling of the propulsion system platform.Finally,through the simulation of the walking process of the mechanism,the action and speed of the mechanism are verified.The results show that the designed robot can smoothly complete the expected action, which provides a reference for the future development of the walking robot with this structure.Key Words:Quadruped robot;Structural design;Three-dimensional modeling;Motion simulation近年来,机器人广泛应用于军事、能源、汽车等行业,所以如何研发出运行效率高、稳定性好、功耗低的机器人具有重要意义[1-2]。
四足机器人行走运动平台结构设计【开题报告】v6.0
附件B:毕业设计(论文)开题报告1、课题的目的及意义1.1课题研究背景目前,机器人的移动主要是轮式、履带式、步行、爬行、蠕动等。
然而,地球上大多数的地面都是崎岖的,不能为传统的轮式或履带式到达,而自然界的很多动物却可以在这些地面行走自如、跨越障碍。
它们经历了自然界数百万年间的选择,已经进化出适应各种环境的生理特征,给了研究人员很大的启发。
步行是大多哺乳动物的移动方式,对环境有很强的适应性,可以灵活的进入相对狭小的空间,可以自由跨越障碍、上下台阶等等。
以此,研究步行机器人有着较强的实际意义。
现在的步行机器人的足数分别为单足、二足、四足、六足等等。
足的数目多时,机器人比较适合重载和慢速运动;二足或者四足机构的机构相对简单,更加灵活。
与二足相比,四足机器人的承载能力强、稳定性能更好,在抢险救灾、探险、娱乐及军事等多个领域有很好的应用前景,其研究工作也备受重视[1]。
2005年,Boston Dynamics公司首次公开了其历经十余载研究而成的仿生四足机器人Big Dog[2],在互联网上引起了全球公众的热议。
Big Dog灵活的机动性、强大的抗干扰能力以及优异的环境适应能力成为当今各国四足机器人研究的典型代表。
尽管如此,从生物进化的角度来说,四足动物的体型结构和运动方式产生了以载重-适应性和高速-灵活性两大功能异化的分支[3]。
Big Dog则是环境适应能力和运动稳定性方面世界最高水平,然而,对高速运动方面的四足机器人却鲜见研究。
高速运动的哺乳动物(尤其是猎豹)以独特的骨骼结构、步态特征、高效的能量转化效率成了仿生四足机器人高速灵活性研究的新方向。
在DARPA的M3计划支持下[4],Boston Dynamics公司和MIT仿生机器人实验室均进行了仿猎豹式机器人的研究,并推出了两款样机。
尤其Boston Dynamics公司的机器人还一举打破了足式机器人奔跑的纪录,达46km/h,使仿猎豹机器人成为新的研究热点。
平面四足步行机器人结构设计
方向和竖直方向运动,且采用移动式关节和模块化结构,
保证了各机构的互换性,这将有利于控制系统的设计,使
得控制系统的设计也可以采用模块化的方式,简化了控
制系统。
3.2 机器人的平面行走约束机构
平面 4 足 步行机器人
机器人 需要被约束
平面 约束机构 仿平面圆形复杂模拟地貌
图 3 平面步行机器人约束机构简图
械设计,2009,23(9):1-3. [3] 刘静,赵晓光,谭民.腿式机器人的研究综述[J].机器人,2006,28
(1):81-84. [4] VUKOBRATOVIC M,et al. Development of active anthro -
pomorphic exoskeletons [J]. Medical & Biological Engineering, 1974(12):66-80. [5] VUKOBRATOVIC M,et al. How to achieve various gait patterns
对多足机器人在复杂地貌上的研究实际上是对步行 机器人行走方法的研究。传统的 ZMP 方法是一种静态步 行运动方法[4],具有许多先天不足。近年来许多学者也曾 提出了一些 ZMP 的改进算法,在一定程度上丰富了 ZMP 的理论思想,但其本质上并没有改变 ZMP 属于静态步行 运动方法这一事实 。 [5-6]
该优化产业内部结构,创新理念,共同合作,通过对包芯线技术的应用推广,实现钢铁行业的低碳经济目标。
关键词:包芯线技术;低碳经济;节能减排
中图分类号:TF703
文献标识码:A
文章编号:1002-2333(2011)05-0011-03
Low Carbon Economic Advantages of Promoting Cored Wire Technology LIU Shun-ping, WU Yu-bin, GONG Hong-tao, WANG Hai-quan, WANG Jie
《具有串并混联结构腿的四足机器人设计》
《具有串并混联结构腿的四足机器人设计》篇一一、引言随着科技的不断发展,四足机器人因其卓越的稳定性和灵活性,在复杂地形中的适应性日益受到关注。
本文旨在设计一种具有串并混联结构腿的四足机器人,以提高机器人的运动性能和适应能力。
本文将详细介绍该四足机器人的设计思路、结构特点及优势。
二、设计思路1. 总体设计本设计的四足机器人采用模块化设计思想,将机器人分为上位机、驱动系统、腿部结构和控制系统等部分。
其中,腿部结构采用串并混联结构,以提高机器人的运动性能和稳定性。
2. 串并混联结构串并混联结构是指在一个机械结构中同时存在串联和并联的元素。
在四足机器人的腿部设计中,我们采用此结构以提高机器人的灵活性和稳定性。
在腿部关节处,我们采用并联结构以提高关节的承载能力和运动范围;而在腿部驱动和传动部分,我们采用串联结构以提高传动效率和动力传递的准确性。
三、结构特点1. 腿部设计四足机器人的腿部采用串并混联结构,包括大腿、小腿和足部等部分。
大腿和小腿通过关节进行连接,并在关节处采用并联结构以提高承载能力和运动范围。
此外,我们还设计了弹簧减震系统,以吸收机器人运动过程中的冲击和振动。
2. 驱动系统驱动系统采用电机和传动装置的串联结构,将电机的动力传递给腿部各关节。
我们选用高性能的直流无刷电机,以保证机器人具有足够的动力和运动速度。
此外,我们还设计了传动装置的润滑系统,以减少传动过程中的摩擦和磨损。
3. 控制系统控制系统是四足机器人的核心部分,我们采用先进的控制算法和传感器技术,实现对机器人运动的精确控制。
我们选用高性能的微处理器作为控制核心,通过传感器实时获取机器人的状态信息,并根据预设的算法对机器人进行控制。
此外,我们还设计了人机交互界面,以便用户对机器人进行操作和监控。
四、优势1. 运动性能优越:采用串并混联结构的腿部设计,使机器人具有较高的灵活性和稳定性,能在复杂地形中实现高效的运动。
2. 承载能力强:在关节处采用并联结构,提高了机器人的承载能力,使其能承载更重的负载。
智能四足机器人结构设计
智能四足机器人结构设计智能四足机器人结构设计摘要对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器人将作为家庭的一员进入我们的生活,与我们每天朝夕相处。
可现在普遍存在人们心中的疑问是:将来机器人将以何种身份进入我们的生活,是玩伴还是佣人,智能步行机器人的设计就是为了将来机器人能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。
本设计采用关节型结构,成功地设计了智能步行机器人的本体结构。
本机器人具有前后行、平地侧行等基本行走功能。
另外机器人头部还装有CD摄影机,胸腔内部可装备内置电源和智能设备。
本设计参考了狗的结构组成,使得机器人结构尽量与狗的本体结构相似,尤其在长度配比方面。
本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。
所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。
伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。
关键词:智能四足机器人;结构设计;谐波传动Intelligent Four-Foot Robot Frame DesignAbstractFor our future life,everyone had different ideas,but most people believe that,in future society,the robot as a family into our lives,and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot into our lives,playmates or servants,the design of intelligent walking robot is to the future robot can enter our Chinese people's family lives,for our happy family life.The design of a joint structure,the successful design ofintelligent walking robot,the body structure. The robot has before and after the trip,the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head,chest internal equipment can be built-in power supply,and intelligent. The reference design of the structure of the robot,making the structure as the robot dog,the dog's body similar to the structure,particularly in the area ratio of length. The design of the structure is more complicated,the large number of joints,in an effort to optimize the design,designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer,the slowdown in the programme reduction ratio,high efficiency,The ideal slowdown is a good programme.Keywords:intelligent four-foot robot ; structural design; harmonic drive目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 本课题的来源、研究目的和意义 (1)1.2 国内外步行机器人的发展概况 (3)1.3本设计的主要内容 (5)第2章智能四足机器人的设计 (6)2.1 自由度的分配及结构方案的设计 (6)2.1.1 自由度的分配 (6)2.1.2 结构方案的设计 (7)2.2关节驱动方案的选择 (9)2.3 传动方案的选择 (10)2.3.1 传动方式 (10)2.3.2减速器和减速比的选择 (10)2.3.3电机与减速器的连接方式 (13)2.4 结构特点及性能参数 (14)2.4.1智能四足机器人的结构特点 (14)2.4.2智能四足机器人的结构性能参数 (15)第3章部分关节部件设计计算 (18)3.1各关节力矩的计算 (18)3.1.1膝关节静力矩的计算 (18)3.1.2髋关节向前后运动自由度的静力矩的计算 (19)3.1.3髋关节左右摆动时静力矩的计算 (20)3.1.4颈关节摆动时的静力矩的计算 (21)3.2谐波传动组件的选择与计算 (21)3.3圆柱齿轮减速器组件选择与计算 (21)3.4各关节所需电机的选择与计算 (22)第4章其它部件的选择 (24)第5章成本估算和环保分析 (26)5.1成本估算 (26)5.2环保与经济分析 (26)结论 (28)致谢 (29)参考文献 (30)附录 (31)第1章绪论1.1本课题的来源、研究目的和意义本课题是步行机器人项目之一。