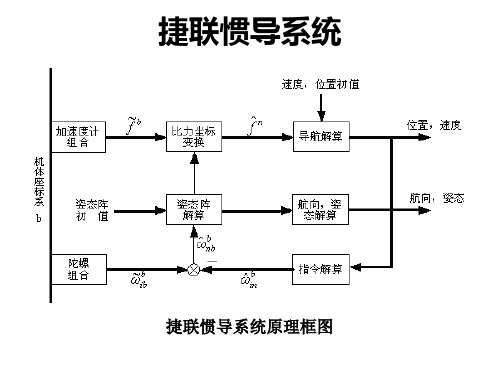
捷联惯导系统原理框图
第六章 捷联惯导

第六章捷联惯导6-1捷联惯导的原理¾捷联惯导系统概述•捷联惯性技术的发展过程•捷联惯导系统与平台惯导系统的对比¾捷联惯导系统的基本力学编排方程•捷联惯导系统的算法概述•捷联惯导系统原理框图的说明•姿态方程的解算(1)姿态和航向角的计算(2)姿态矩阵的微分方程(3)四元数的运动学微分方程(4)等效旋转矢量法及其微分方程(5)位移角速率方程(6)速度方程•导航位置方程(1)游动方位系与地球系之间的方向余弦矩阵(2)载体位置计算(3)方向余弦矩阵计算•垂直通道阻尼¾捷联惯性器件的余度技术•单自由度陀螺仪的配置方案(1)四陀螺仪配置方案(2)六陀螺仪系统•二自由度陀螺仪的配置方案¾捷联惯导的数值计算方法•数值积分法(1)欧拉法(2)四阶龙格-库塔法•角速率信息的提取“捷联(Strapdown)”这一术语的英文原义就是“捆绑”的意思。
因此,所谓捷联惯性系统也就是将惯性敏感元件(陀螺与加速度计)直接“捆绑”在载体上,从而完成制导和导航任务的系统。
V-2导弹“阿波罗-13”宇宙飞船“海盗”火星降落器从捷联技术的发展过程中我们已经看到捷联系统的优越性已越来越突出的显示出来,并在许多方面已日渐代替平台系统。
为什么会出现这种情况呢?为了回答这一问题,这里从生产与使用的角度将捷联系统与平台系统做一对比。
(1)硬件和软件的复杂程度由于捷联系统没有平台框架及相连的伺服装置,因而简化了硬件;代价是增加了计算机的负担,需要一个比较复杂的实时程序。
(2)可靠性捷联系统的可靠性要比平台系统高,其原因是它的机械构件少,加之容易采用多敏感元件配置,实现余度技术。
(3)成本与可维护性由于平台系统在机械结构上要复杂得多,而对于捷联系统只是算法复杂些,因而从制造成本上看捷联系统的成本要比平台系统低。
从市场供应的情况来看,数字计算机的价格一直在下降,而平台系统的价格一直在上升。
此外,捷联系统比平台系统具有较长的平均故障间隔时间,加之模块设计简化了维修,从而捷联系统的可维护性比平台系统大为提高了。
捷联惯性导航系统的解算方法ppt课件

的 分量构成的矩阵,则
r rnT n r nT Cnb n rnT r nT Cbn
由于坐标系不动而是矢量转动,它 相应于矢量固定时坐标系方向转动
rn
n
C
n b
r
2010-03-19
方向余弦矩阵微分方程
由矢量相对导数和绝对导数的关系式
dr dt
n
dr dt
b
ω nb r
假定地理坐标系为参考坐标系,作为参考 坐标系认为它在空间是不动的,即
如把OXbYbZb作为动坐标系, ENU作为参考坐标系,则航向 角H,纵摇角(俯仰角)P和横 摇角(横滚角、倾斜角)R。就 是一组欧拉角。
Zb Zb'' U Zb' P
欧拉角没有严格的定义,根 据
需要,可以选用不同的欧拉 角
组。第一次转动,可以绕三 个
轴中的任一个转动,故有3种 可
能,第二次有2种可能,第三 次
启动
自检 测
初始 化
返回9
姿态
迭 数
代
次阵计 算
N O
YES
导 航 计 控 制 信 息算提 取
3.2 姿态矩阵的计算
捷联式惯导中,载体地理位置就是地理坐标系相对 地球坐标系的方位。而载体的姿态和航向则是载体 坐标系相对于地理坐标系的方位关系。确定两个坐 标系的方位关系问题,是力学中的刚体定点转到理 论。在刚体定点转动理论中,描述动坐标系相对参 考坐标系方位关系的方法有多种。
求解方程可以直接得到航向和姿态信息,
欧 拉角法得到的姿态阵永远是正交阵,用这
个矩 阵将比力fb→fn信息的坐标变换时,变换后的信 息
中不存在非正交误差。因此,用欧拉角法得 到的姿态矩阵无
捷联惯导系统解读
Q cos
u sin
2(q1q2 q0 q3 )
2 2 q0 q12 q22 q3
2(q2 q3 q0 q1 )
2(q1q3 q0 q2 ) 2(q2 q3 q0 q1 ) 2 2 q0 q12 q2 q32
T11 T21 T31 C bn T T T 12 22 32 T13 T23 T33
1 sin (T32 ) T31 1 tan ( ) 主 T 33 1 T 主 tan ( 12 ) T22
b nb x b 0 nby b 1 cos tan nb z 0
cos cos sin
当 90 时,方程退化,故不能全姿态工作。
捷联惯导系统
2.2 方向余弦法(九参数法)
n C n ωbk C b b nb
0 [ G ] Gz Gy
Gz
0 Gx
Gy Gx 0
K x [ K ] 0 0
0
Ky
0
0 0 Kz
捷联惯导系统
捷联惯导系统误差方程
b b b n n ωnb ωib Cn Cnωin
矢量的方向余弦表示姿态矩阵的方法; 可全姿态工作,但需要解含有九个未知量的线性方程组,计算量大, 工程上不实用。
捷联惯导系统
2.3 四元数法(四参数法)
2.3.1 四元数基本概念 四元数是由一个实数单位1和一个虚数单位i、j、k组成的含有四个 元的数。(超复数) Q q0 , q1, q2 , q3 q0 q1i q2 j q3k 四元数的大小——范数
捷联惯性导航系统的解算方法课件

02
CATALOGUE
捷联惯性导航系统组成及工作 原理
主要组成部分介绍
惯性测量单元
包括加速度计和陀螺仪,用于测量载体在三个正交轴上的加速度 和角速度。
导航计算机
用于处理惯性测量单元的测量数据,解算出载体的姿态、速度和 位置信息。
控制与显示单元
用于实现人机交互,包括设置导航参数、显示导航信息等。
工作原理简述
学生自我评价报告
知识掌握情况
学生对捷联惯性导航系统的基本原理、解算 方法和实现技术有了深入的理解和掌握。
实践能力提升
通过实验和仿真,学生的动手实践能力得到了提升 ,能够独立完成相关的实验和仿真验证。
团队协作能力
在课程项目中,学生之间的团队协作能力得 到了锻炼和提升,能够相互协作完成项目任 务。
对未来发展趋势的预测和建议
捷联惯性导航系统的解算 方法课件
CATALOGUE
目 录
• 捷联惯性导航系统概述 • 捷联惯性导航系统组成及工作原理 • 捷联惯性导航系统解算方法 • 误差分析及补偿策略 • 实验验证与结果展示 • 总结与展望
01
CATALOGUE
捷联惯性导航系统概述
定义与基本原理
定义
捷联惯性导航系统是一种基于惯性测量元件(加速度计和陀螺仪)来测量载体(如飞机、导弹等)的加速度和角 速度,并通过积分运算得到载体位置、速度和姿态信息的自主导航系统。
01
高精度、高可靠性
02
多传感器融合技术
随着科技的发展和应用需求的提高, 捷联惯性导航系统需要进一步提高精 度和可靠性,以满足更高层次的应用 需求。
为了克服单一传感器的局限性,可以 采用多传感器融合技术,将捷联惯性 导航系统与其他传感器进行融合,提 高导航系统的性能和鲁棒性。
捷联式惯性测量基本原理____重要

13
系统举例——相对惯性系导航:
捷联惯导系统所执行的主要功能:
产生载体姿态的角速度测量值的处理、惯性参考系中比力测量值的分解、重力的 补偿以及对加速度估计值进行的积1分4 运算(以确定载体的速度和位置)。
32
5、捷联姿态表达式 & 姿态矩阵更新方法 四元数:
四元数姿态表达式是一个四参数的表达式。它基于的思路是:一个坐 标系到另一个坐标系的变换可以通过绕一个定义在参考坐标系中的矢 量μ的单次转动来实现。四元数用符号q表示,它是一个具有4个元素 的矢量,这些元素是该矢量方向和转动大小的函数。
33
5、捷联姿态表达式 & 姿态矩阵更新方法 四元数:
绕参考坐标系的 z 轴转动ψ角 绕新坐标系的 y 轴转动θ角 绕新坐标系的 Z 轴转动φ角 ψ、θ和φ称为欧拉转动角
30
5、捷联姿态表达式 & 姿态矩阵更新方法 欧拉角:
31
5、捷联姿态表达式 & 姿态矩阵更新方法 欧拉角随时间的传递(或更新):
这种形式的等式可在捷联系统中进行解算,用来更新载体相对于所选参 考坐标系的欧拉转动。然而,在θ=土90度时,由于ψ和φ方程的解变得 不确定,因而上式使用受到限制。
这种系统中,需要在惯性系中计算运载体相对于地球的速度,即地速,用符 号表示。
16
4、捷联微惯性测量系统——机械编排 系统举例——相对惯性系导航:
17
4、捷联微惯性测量系统——机械编排 系统举例——相对惯性系导航:
18
4、捷联微惯性测量系统——机械编排 系统举例——相对地球坐标系导航:
在这类系统中,地速是在与地球固连的坐标系中表 示的,即表示为 。根据哥氏方程,速度相对于地球 坐标系的变化率可用惯性系下速度的变化率来表示:
车载捷联惯导系统基本原理
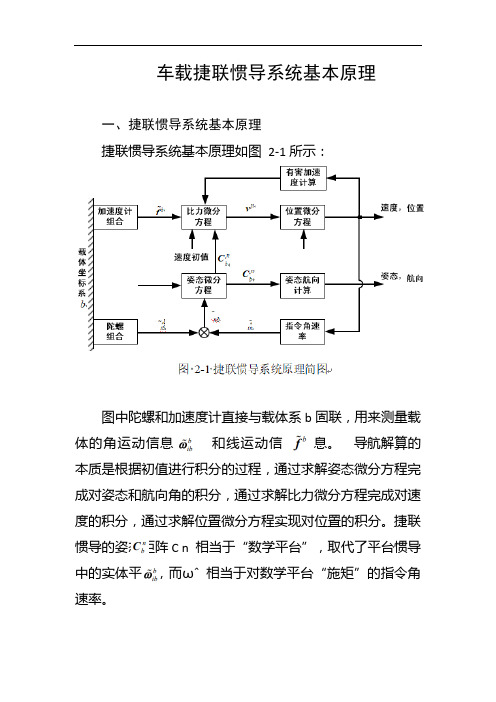
车载捷联惯导系统基本原理一、捷联惯导系统基本原理捷联惯导系统基本原理如图2-1所示:图中陀螺和加速度计直接与载体系b固联,用来测量载体的角运动信息和线运动信息。
导航解算的本质是根据初值进行积分的过程,通过求解姿态微分方程完成对姿态和航向角的积分,通过求解比力微分方程完成对速度的积分,通过求解位置微分方程实现对位置的积分。
捷联惯导的姿态矩阵C n 相当于“数学平台”,取代了平台惯导中的实体平台,而ωˆ相当于对数学平台“施矩”的指令角速率。
二、捷联惯导微分方程(一)姿态微分方程在捷联惯导系统中,导航坐标系n 和载体坐标系b 之间的角位置关系通常用姿态矩阵、四元数和欧拉角表示,相应也存在姿态矩阵微分方程、四元数微分方程和欧拉角微分方程三种形式。
姿态矩阵微分方程的表达式为:在欧拉角微分方程式(2.2-7)中,当俯仰角θ趋于90º时,cosθ趋于0,tanθ趋于无穷,方程存在奇异性,所以这种方法不能在全姿态范围内正常工作;姿态矩阵微分方程式(2.2-1)可全姿态工作,但姿态矩阵更新相当于求解包含9个未知量的线性微分方程组,计算量大;四元数微分方程式(2.2-6)同样可以全姿态工作,且更新算法只需求解4个未知量的线性微分方程组,计算量小,算法简单,是较实用的工程算法。
(二)速度微分方程速度微分方程即比力方程,是惯性导航解算的基本关系式:三、捷联惯性导航算法捷联惯导解算的目的是根据惯性器件输出求解载体姿态、速度和位置等导航信息,实际上就是求解三个微分方程的过程,相应存在姿态更新算法、速度更新算法和位置更新算法。
(一)姿态更新算法求解微分方程式(2.2-6)可得四元数姿态更新算法为:在车辆行驶过程中,一般不存在高频大机动环境,并且车载导航系统往往不工作在纯惯性导航方式,而是利用里程仪或零速条件进行组合导航,所以算法误差的影响有限,常用的5ms采样周期和二子样优化算法即可满足要求。
四、捷联惯导误差模型传感器误差、初值误差和算法误差是SINS的主要误差源,其中器件误差和初值误差又是影响导航结果的主要因素。
捷联惯导结算原理
0 cos sin , Rz sin 0 cos
sin cos 0
0 0 1
cos cos sin sin sin cos cos sin sin cos sin cos T11 T12 T13 Ry Rx Rz cos sin cos cos sin T21 T22 T23 sin cos cos sin sin sin sin cos sin cos cos cos T T T 31 32 33 b 由姿态矩阵 C n 反解飞行器姿态欧拉角:
(5) 速度的计算
t t t t t 0 2iez etz ety 2iey Vxt Vx 0 t t b t t t t 0 2iex etx Vyt 0 Vy Cb f 2iez etz t Vz g Vzt 2 t t 2 t t 0 iey ety iex etx
o o sin 1 T23 , 90 , 90
tg 1
T13 180o , 180o , T33
tg 1
T21 o o , 180 , 180 T 22
图 6 东向北向速度变化曲线
阶段总结:1.学习了平台式和捷联式惯导的惯导解算方法并进行了仿真计算。 2.平台式惯导物理平台时刻跟踪当地水平东北天地理系, 加速计的比 力信息直接投影在导航系中,可直接进行导航速度和位置解算。载体的姿态可直 接从平台框架直接得出;而捷联式惯导用数学平台取代实体的物理平台,通过求
INS捷联惯导
测量角速度
t2
Light source
Q
22
三角环型激光陀螺原理图
23
激光陀螺主要构成部件
1
2 3 4 5
晶体块状材料 反射镜 增益介质 读出机构 相关的电路
24
Laser Gyro Error Source
25
干涉型光纤陀螺仪(I-FOG)
偏振器 激光源 光纤线圈 检测器
耦合器
耦合器 调制器
1 cos
2
x y
2
x
1 cos
2
y
y z
z x y 2 sin 1 cos x y z 2 1 cos 2 cos z 2 sin 1 cos
ax
ay
X轴加速度计
ax
ay
积 Vx 积 分 分 积 Vy 积 分 分 计算机
Sx Sy
Y轴加速度计 陀螺稳定平台
8
三轴惯导平台结构示意图
9
5.捷联式惯导系统(空间导航)
加速度
飞行器坐标系 与地理坐标系 间方向余弦矩 阵 加速度 导 航 分量 计 算 速度 输 位置 出 显 示
C C
5 10
2.1惯性导航基本概念
f 2ie eT VeT g
T
是在平台坐标系内观察到的地速矢量VeT的变 化率,将上式在T系内投影,则有
T T T T VeT f T 2ie eT gT VeT
f 是加速度计的测量值,包括三部分有害加速度:地球
自转的哥式加速度、载体转动的哥式加速度和重力加速 度干扰。
h h 2g f z g0 R
该方程是不稳定的,因此在垂直方向惯性测量不能长时 应用
8
1、基本概念 坐标系定义
• 地心惯性坐标系(i系):
• 地球坐标系(e系): • 地理坐标系(g系):东北天坐标系
• 导航坐标系(n系):一般选地理坐标系(东北天)
• 理想平台坐标系(T系):同导航坐标系 • 实际平台坐标系(p系):在平台台体上的惯性仪 表(陀螺)敏感确定,相对于T系有平台误差角 • 载体坐标系(b系):原点在载体质心,三个轴向 分别为右,前,上
r C r r
m m n n m mn
m
10
1、基本概念 基本方程推导
设惯性坐标系 i 和理想平台坐标系 T,则 T 系相对 i 系的 运动包括:T 系相对 e 系运动, e 系相对 i 系运动
zi
i
zT ie
T
R
yT
xi
yi
xT
自地心至理想平台坐标系 T 的支点有位置矢量R,根 据哥氏加速度定理
i ( j ' z k ' y ) i (k ' x i ' z ) i (i ' y j ' x ) j ( j ' z k ' y ) j (k ' x i ' z ) j (i ' y j ' x ) k ( j ' z k ' y ) k (k ' x i ' z ) k (i ' y j ' x )
§3.9~3.10捷联式惯导系统
§3.9捷联式惯导系统概论一、概述“捷联”(strap down)这一术语的英文原意就是“捆绑”的意思,因此,所谓捷联系统就是将惯性测量装置的敏感器(陀螺仪与加速度计)直接捆绑在运载体上,从而可实现运动对象的自主导航目的。
平台式惯性导航系统虽然已经达到很高水平,但其造价高、使用十分昂贵。
计算机虽为数字式,但框架伺服系统一般仅采用模拟线路,所以相对来讲,可靠性差一些。
就在平台式惯性导航系统迅速发展的同时,捷联式惯性导航系统也处于研制过程中。
捷联式惯导方案是1956年提出的,当时由于没有满足捷联式系统历要求的惯性元件和计算机,因而没有被采用。
而平台式系统则不断改进、不断完善,达到了相当高的精度,满足了大多数任务的要求。
但是在可靠性和成本方面平台式系统都暴露出一系列严重问题。
与此同时计算技术取得了惊人的进展,克服了捷联式系统发展的一个主要障碍。
捷联式系统的高可靠性和低成本促使人们进—步对它进行新的技术探索。
上世纪六十年代初,美国联合飞机公司首先研制成功了第一个捷联式系统,于1969年成功地应用在阿波罗登月任务中。
捷联式惯性导航系统是将惯性敏感器(陀螺和加速度计)直接安装在运载体上,不再需要物理实现稳定平台的惯性导航系统。
陀螺仪作为角速率传感器而不是作为角位移传感器;加速度计的输入轴不是保持在已知确定方向上,加速度计测量值是运载体瞬时运动方向的加速度值。
通过计算机内的姿态矩阵实时计算而得到一个“数学解析平台”,它同样可以起到机电结合的稳定平台所提供的在惯性空间始终保持所要求的姿态作用。
捷联式惯性导航系统有以下几个主要优点:(1) 惯性敏感器便于安装、维修和更换。
(2) 惯性敏感器可以直接给出载体坐标系轴向的线加速度、线速度、供给载体稳定控制系统。
(3) 便于将惯性敏感器重复布置,从而易在惯性敏感器的级别上实现冗余技术,这对提高系统的性能和可靠性十分有利。
(4) 由于去掉了物理实现的平台,一则消除了稳定平台稳定过程中的各种误差;二则由于不存在机电结合的平台装置,使整个系统可以做得小而轻,并易于维护。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Vrotm 旋转效应:rotation 载体线运动在空间的旋转,角速度与线速度不共线; Vsculm 划桨效应:scull 绕一轴做线振动同时绕另一轴做同频角振动; (根本原因:更新周期内姿态角的变化引起) n Vg /corm 有害加速度:g/Coriolis
捷联惯导系统
2. 位置更新算法
2 2 2 q0 q12 q2 q3 CbR 2(q1q2 q0 q3 ) 2(q1q3 q0 q2 )
Q cos
u sin
2(q1q2 q0 q3 )
2 2 q0 q12 q22 q3
2(q2 q3 q0 q1 )
2(q1q3 q0 q2 ) 2(q2 q3 q0 q1 ) 2 2 q0 q12 q2 q32
b nb x b 0 nby b 1 cos tan nb z 0
cos cos sin
当 90 时,方程退化,故不能全姿态工作。
捷联惯导系统
2.2 方向余弦法(九参数法)
n C n ωbk C b b nb
b 直线拟合:ωnb (t k ) a 2b
b ωnb (tk ) a 2b 3c 2 抛物线拟合:
b 2 3 ω ( t ) a 2 b 3 c 4 d nb k 三次抛物线:
Φ (h) θ1 θ2 θ3 θ4
T11 T21 T31 C bn T T T 12 22 32 T13 T23 T33
1 sin (T32 ) T31 1 tan ( ) 主 T 33 1 T 主 tan ( 12 ) T22
736 (θ1 θ2 θ3 θ4 ) 945 334 526 654 (θ1 θ3 θ2 θ4 ) θ1 θ4 θ2 θ3 945 945 945
捷联惯导系统
四元数法与等效旋转矢量法的区别: • 原理相同:计算姿态四元数完成姿态更新; • 四元数算法 等效旋转矢量的单子样算法;
Θ
2
Q (tk 1 ) ( I
)Q (tk )
捷联惯导系统
2.3.3 四元数初值的确定与归一化
q1 q2 q3 q0 1 2 1 2 1 2 1 2 1 T11 T22 T33 1 T11 T22 T33 1 T11 T22 T33 1 T11 T22 T33
n n n b in in Cb ([ KG ] [ G])ωib εn
姿态误差方程:
N N’
E in U
U
N in U
E’ E
捷联惯导系统
捷联惯导系统误差方程
n n n 速度误差方程: V n n f n Cb ([ K A ] [ A]) f b V n (2ωie ωen ) n n V n (2 ωie ωen ) n
[ , v ]
[ (t ), a (t )]
t
[ , v ]
[att , v , pos ]
捷联解算
航迹仿真
加误差
[att , v, pos ]
MATLAB仿真
1、轨迹生成仿真
目的:航迹仿真的目的是生成惯性器件信息源(比力和角速度) ,并给出
相应航迹点的航行参数(姿态、速度和位置) 1)航行轨迹微分方程 姿态角微分方程:
2 2 2 Q q0 q12 q2 q3
四元数表达方式 三角式
Q cos
2
u sin
2
基本运算
捷联惯导系统
动坐标系相对于参考坐标系的转动,等效于动坐标系绕某一个等效转 轴转动一个角度(θ,u)
四元数描述转动:
2 2 四元数是刚体转动的一种描述形式。 结论: • 四元数可以描述刚体的定点转动,Q包含了等 效旋转的全部信息; • 四元数与姿态矩阵的关系; • 描述刚体转动的四元数是规范化四元数;
L arcsin P33
0 sin L sin cos L cos L sin sin L
主 arctg
P32 P31
cos
捷联惯导系统
4. 捷联惯导系统误差方差
捷联惯导系统误差源 • 惯性仪表的安装误差和刻度因子误差 b b • 陀螺漂移 ε 和加速度计零位 • 初始条件误差 • 计算误差
ω(t )
cos ω(t ) 0 sin sin cos b 1 sin ω nb (t ) 0 cos cos 0
泰勒级数展开、曲线拟合的方法(几个采样角就为几子样算法)
0 h
b (tk ) a 常数拟合:ωnb
Φ(h) θ
2 Φ (h) θ1 θ2 θ1 θ2 3
Φ (h) θ1 θ2 θ3 33 57 θ1 θ3 θ2 (θ3 θ1 ) 80 80
2. 速度更新算法
基础:比力方程
n n V n Cbn f b 2ωie ωen V n g n
n n b n 数字递推形式: Vm Vm1 C m1Vsfm Vg / corm n n Vm 1 C m 1 ( Vm Vrotm Vsculm ) Vg / corm
-Q cos
2
u sin
cos( ) u sin( ) cos 2 2 2
2 2 u sin 2 2
表征旋转的四元数应该是规范四元数; Q 1 计算误差,失去规范性,需归一化处理;
qi ˆi q
2 2 2 ˆ0 ˆ12 q ˆ2 ˆ3 q q q
真值表判断
捷联惯导系统
2.4 等效旋转矢量法
四元数法求解中用到了角速度矢量的积分。 当不是定轴转动时,即角速度矢量的方向在空间变化时,将使计算产生误 差,称为转动不可交换性误差。 为了消除不可交换性误差,必须对角速度矢量积分修正,修正的方法是采用 等效旋转矢量算法把角速度矢量积分等效为等效旋转矢量,利用等效旋转矢量的 概念将四元数微分方程转化为等效旋转矢量微分方程(即Bortz方程):
捷联惯导中的姿态更新实质上是如何计算四元数。
捷联惯导系统
2.3.2 四元数微分方程
n qb
1 n b qb ωnb 2
n n ( m) n b ( m) qb ( m) qn ( m1) qb ( m1) qb ( m1)
毕卡求解法(角增量) 1)定时采样增量法:采样时间间隔相同; 2)定量采样增量法:角增量达到一固定值时才更新;
数字递推形式:
n (l ) n(l 1) Cen(l ) Cn C (l 1) e
n n n (l ) en F (t )V n (t ) l en dt F R n C n ( l 1)
sin C en sin L cos cos L cos
欧拉角法:概念直观;只适应水平姿态角变化不大的情况,不能全姿态 解算。 方向余弦法:可全姿态工作;但计算量大,不实用。 四元数法:算法简单,计算量小;存在不可交换误差,适应于低动态运 载体。(等效旋转矢量的单子样) 等效旋转矢量法:可对不可交换性误差进行补偿,算法简单,适应于高 动态环境。
捷联惯导系统
Φ(h) θ1 θ2
2 Φ (h) θ1 θ2 θ1 θ2 3
• 算法思路不同; 等效旋转矢量法思路:
n n ( m) n b ( m) qb ( m) qn ( m1) qb ( m1) qb ( m1)
n in
b ib
捷联惯导系统
2.4 几种姿态算法的比较
位置误差方程: L
VN
RM h
VE
RN h
h
VN ( RM h) 2
VE V sec L tan L sec L h E RN h ( RN h) 2
sec L 仿真
1、轨迹生成仿真 2、惯导器件输出信息的仿真 3、捷联惯导解算仿真 4、基本函数
4q1 q 0 T32 T23 4q 2 q 0 T13 T31 4 q q T T 21 12 3 0
sign(q1 ) sign(q 0 )[sign(T32 T23 )] sign(q 2 ) sign(q 0 )[sign(T13 T31 )] sign(q ) sign(q )[sign(T T )] 3 0 21 12
矢量的方向余弦表示姿态矩阵的方法; 可全姿态工作,但需要解含有九个未知量的线性方程组,计算量大, 工程上不实用。
捷联惯导系统
2.3 四元数法(四参数法)
2.3.1 四元数基本概念 四元数是由一个实数单位1和一个虚数单位i、j、k组成的含有四个 元的数。(超复数) Q q0 , q1, q2 , q3 q0 q1i q2 j q3k 四元数的大小——范数
θ
t t
t
dt Φ
t t
t
( )dt
q cos Φ 2 Φ Φ sin Φ 2
表征旋转的另一种形式:
Φ u
1 1 b Φ nb (t ) Φ ωb ( t ) Φ (Φ ωb nb nb (t )) 2 12
捷联惯导系统
捷联惯导系统
捷联惯导系统原理框图
捷联惯导系统
• • • • 姿态更新算法 速度更新算法 位置更新算法 系统误差方程
捷联惯导系统