皮带机驱动和改向滚筒静平衡计算和试验方法
井下皮带机各保护试验办法实施细则

井下皮带机各保护试验办法实施细则为规范井下皮带机各类保护试验方法和操作顺序,特制订实施细则如下。
一、井下各部皮带机保护设置情况及试验要求:1、主井装载皮带机(平巷、倾角3‰、带宽1000mm、全长90米)2、东翼第二部皮带机(上运、倾角0—16°、带宽1000mm、全长510米)3、东翼第三部皮带机(上运、倾角0—16°、带宽1000mm、全长700米)4、西翼第一部皮带机(上运、倾角0—15.5°、带宽1000mm、全长1949米)5、西翼第二部皮带机(上运、倾角0—12°、带宽1000mm、全长850米)6、西翼第三部皮带机(下运+上运、倾角-10—0—12°、带宽1000mm、全长850米)二、皮带机保护试验方法:(一)、烟雾保护:1、安设要求:(1)、烟雾传感器应吊挂在可能产生烟雾部位的下风处的顶板上。
具体吊挂位置视巷道风速大小而定。
若风速在2m/s左右,烟雾传感器吊挂点与产生烟雾点的距离要大于5m;风速超过3m/s,吊挂距离需大于10米。
我矿规定不大于5米。
(2)、如驱动滚筒与卸载滚筒间距小于5米时,可在卸载滚筒下风侧安装1个传感器,如大于5米时,分别装设。
2、试验方法:(1)、按钮试验:有试验按钮的,每天早班接班时(停车状态)进行按钮试验。
(2)、模拟试验方法一:在地面维修车间将备用烟雾传感器接入保护箱并通电,在上风侧烟雾传感器下方点燃物品产生烟雾,飘入烟雾传感器气敏室。
如报警则说明传感器灵敏、完好,如不报警则说明传感器损坏。
(3)、模拟试验方法二:在地面维修车间将备用烟雾传感器按电压等级要求接线并通电,在上风侧烟雾传感器下方点燃物品产生烟雾,飘入烟雾传感器气敏室。
如报警则说明传感器灵敏、完好,如不报警则说明传感器损坏。
(4)、利用检修时间,将试验完好的传感器更换井下在用传感器。
(二)温度保护和超温自动洒水装置:1、安设要求:(1)、温度传感器安装前必须检查档位开关选择2档,出厂时动作温度设置4个档,依次为:40℃±2℃,65℃±3℃,78℃±3℃,25℃±2℃(仅供验收试验用),四档可由选择开关XK的1~4档对应任设一档(出厂时设定为1档即40±2℃档,如需设定为其它档位请将选择开关XK对应档位打在ON位置处,其余档位须断开),我矿井下一般选择2档即65℃±3℃。
滚筒静平衡试验规程
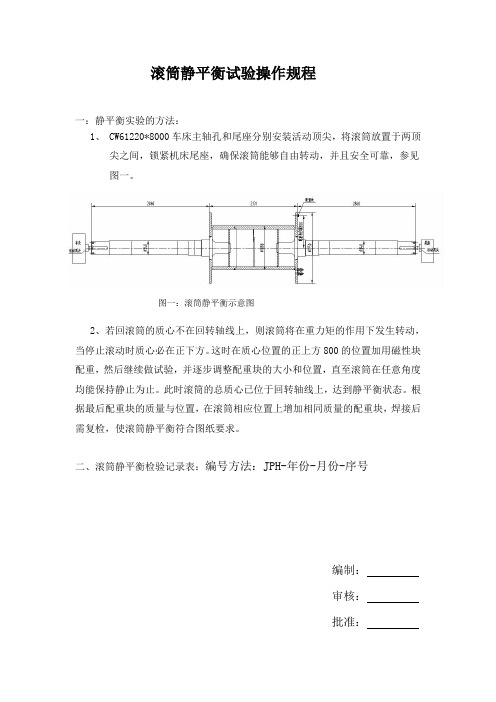
滚筒静平衡试验操作规程一:静平衡实验的方法:1、CW61220*8000车床主轴孔和尾座分别安装活动顶尖,将滚筒放置于两顶尖之间,锁紧机床尾座,确保滚筒能够自由转动,并且安全可靠,参见图一。
图一:滚筒静平衡示意图2、若回滚筒的质心不在回转轴线上,则滚筒将在重力矩的作用下发生转动,当停止滚动时质心必在正下方。
这时在质心位置的正上方800的位置加用磁性块配重,然后继续做试验,并逐步调整配重块的大小和位置,直至滚筒在任意角度均能保持静止为止。
此时滚筒的总质心已位于回转轴线上,达到静平衡状态。
根据最后配重块的质量与位置,在滚筒相应位置上增加相同质量的配重块,焊接后需复检,使滚筒静平衡符合图纸要求。
二、滚筒静平衡检验记录表:编号方法:JPH-年份-月份-序号编制:审核:批准:编号:JPH-年份-月份-序号产品工号产品名称零件图号零件名称工件重量(W) 数量编号静平衡检测要求P≤[P] 执行精度等级[P]的计算数值 [P] =试块重量检测结果是否进行补偿施工施工的操作情况施工次数操作者首测复测说明:P—检测不平衡重量(kg) [P]—不平衡重量许用值(kg)当检测不平衡试块达到许用值后,仍不能满足要求时,需进行平衡补偿施工,补偿施工方法及要求各项目规定,但必须继续静平衡测试直至满足上述规定的条件。
检测人(签章)日期编号:JPH-2013-06-01 产品工号ZP11-Y006 产品名称海洋钻井平台钻井系统开发零件图号DS4600-00-0301 零件名称滚筒轴工件重量(W) 10964kg 数量 1 编号1# 静平衡检测要求P≤[P] 执行精度等级G6.3 [P]的计算数值 [P] =6.202kg试块重量检测结果是否进行补偿施工施工的操作情况施工次数操作者首测 5.3kg 合格否 1复测合格 1说明:P—检测不平衡重量(kg) [P]—不平衡重量许用值(kg)当检测不平衡试块达到许用值后,仍不能满足要求时,需进行平衡补偿施工,补偿施工方法及要求各项目规定,但必须继续静平衡测试直至满足上述规定的条件。
皮带机滚筒及托辊技术要求
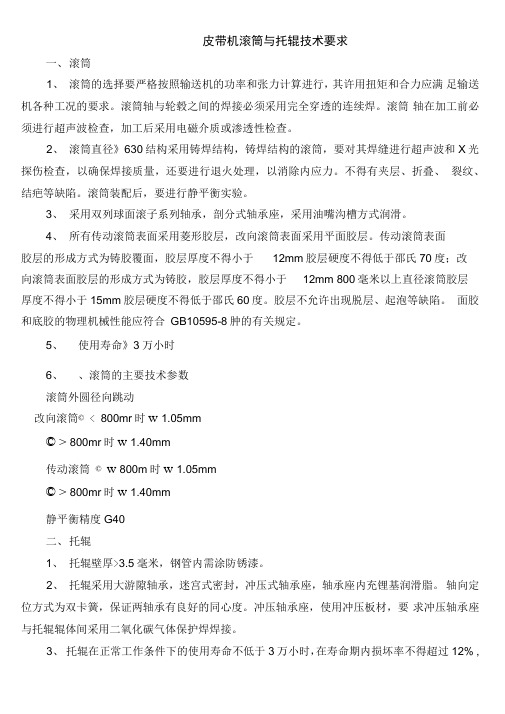
皮带机滚筒与托辊技术要求一、滚筒1、滚筒的选择要严格按照输送机的功率和张力计算进行,其许用扭矩和合力应满足输送机各种工况的要求。
滚筒轴与轮毂之间的焊接必须采用完全穿透的连续焊。
滚筒轴在加工前必须进行超声波检查,加工后采用电磁介质或渗透性检查。
2、滚筒直径》630结构采用铸焊结构,铸焊结构的滚筒,要对其焊缝进行超声波和X光探伤检查,以确保焊接质量,还要进行退火处理,以消除内应力。
不得有夹层、折叠、裂纹、结疤等缺陷。
滚筒装配后,要进行静平衡实验。
3、采用双列球面滚子系列轴承,剖分式轴承座,采用油嘴沟槽方式润滑。
4、所有传动滚筒表面采用菱形胶层,改向滚筒表面采用平面胶层。
传动滚筒表面胶层的形成方式为铸胶覆面,胶层厚度不得小于12mm胶层硬度不得低于邵氏70度;改向滚筒表面胶层的形成方式为铸胶,胶层厚度不得小于12mm 800毫米以上直径滚筒胶层厚度不得小于15mm胶层硬度不得低于邵氏60度。
胶层不允许出现脱层、起泡等缺陷。
面胶和底胶的物理机械性能应符合GB10595-8肿的有关规定。
5、使用寿命》3万小时6、、滚筒的主要技术参数滚筒外圆径向跳动改向滚筒© < 800mr时w 1.05mm© > 800mr时w 1.40mm传动滚筒© w 800m时w 1.05mm© > 800mr时w 1.40mm静平衡精度G40二、托辊1、托辊壁厚>3.5毫米,钢管内需涂防锈漆。
2、托辊采用大游隙轴承,迷宫式密封,冲压式轴承座,轴承座内充锂基润滑脂。
轴向定位方式为双卡簧,保证两轴承有良好的同心度。
冲压轴承座,使用冲压板材,要求冲压轴承座与托辊辊体间采用二氧化碳气体保护焊焊接。
3、托辊在正常工作条件下的使用寿命不低于3万小时,在寿命期内损坏率不得超过12% ,托辊在装配后,要进行抽检,性能检测项目有:防尘、防水、旋转阻力、轴向窜动、径向跳动等。
4、托辊的主要技术性能参数运行阻力系数< 0.022外圆径向跳动< 0.5旋转阻力< 1.9托辊轴向承载能力》20000N 轴向位移量 < 0.25轴承使用寿命> 3万小时。
机械静平衡测量方法

机械静平衡测量方法我折腾了好久机械静平衡测量方法,总算找到点门道。
一开始啊,我真是瞎摸索,啥都不懂就一头扎进去了。
我试过的一个方法呢,就是在一个比较简单的水平轴上让机械部件转动。
就像是让一个不太圆的轮子在一根木杆上转,你想啊,如果这个轮子不平衡,那它转起来肯定是晃晃悠悠的。
我先是把机械部件小心地放在这个轴上,然后轻轻一转,就像咱们玩小时候的陀螺一样,这一转可就看出问题来了。
但这个方法有个不好的地方就是太不精确了。
因为光凭眼睛看它晃悠得厉不厉害,这个误差可太大了。
有时候可能看着差不多,但实际上离真正的平衡还差得远呢。
后来我又试了一种更精确一点的方法。
我找了几个支撑点来测量机械部件每个方向的重量分布的感觉。
这就好比我们站在跷跷板的不同位置,看哪边重哪边轻一样。
我会在部件上做一些很小的标记,来确定重量似乎不均匀的地方。
不过这里得小心啦,我就犯过错,有一次标记弄混了,结果重新测了一遍又一遍,可把我折腾坏了。
还有一个挺实用的办法,就是利用那种可以感应重量的仪器,虽然我这个仪器不是特别高级的那种,但也能起到一定的作用。
就像我们去称东西的秤一样,只不过这个是用来检测部件不同位置的力的。
我把机械部件分好区域,一个区域一个区域地放在仪器上去测,这样慢慢就能知道哪里重哪里轻。
不过这个方法呢,仪器的准确性还是很重要的,如果仪器不准,那测量结果就全错了。
要是有能更精确校准仪器的方法就好了,我到现在也还不太确定这个要怎么做更准确。
要是你们也在捣鼓机械静平衡测量方法,我觉得最开始的时候别嫌麻烦,多试试不同的方法,说不定哪个就特别适合你的情况。
就像我一开始那样,虽然走了很多弯路,但是每一次错误都是有价值的。
还有啊,在测量的时候一定要保持环境稳定,要是周围乱晃,就像在地震的时候去称东西一样,那肯定测不准的。
另外记录数据一定要准确详细,别像我那次把标记弄混,要不然后面纠错可费劲了。
这些都是我在不断尝试中总结出来的心得。
剩下的就看你自己在实践中不断摸索改进喽。
机械设计:皮带机皮带跑偏调整口诀

机械设计:皮带机皮带跑偏调整口诀带式输送机作为连续散装物料的运输机械,在搅拌、破碎及筛分设备中得到了广泛地应用,输送机在运输过程中,由于各种原因经常会出现胶带跑偏现象,这不仅会引起漏料、设备的非正常磨损与损坏,降低生产率,而且会影响整套设备的正常工作。
因此,正确判断出胶带跑偏的原因并及时予以排除,是一项非常重要的工作。
造成输送机胶带跑偏的根本原因是:胶带所受的外力在胶带宽度方向上的合力不为零或垂直于胶带宽度方向上的拉应力不均匀而引起的。
由于导致胶带跑偏的因素很多,故应从输送带的设计、制造、安装调试、使用及维护等方面来着手解决胶带的跑偏现象,使得输送机能够顺利地为生产服务。
1)传动滚筒或机尾滚筒两头直径大小不一;2)滚筒或托辊表面有煤泥或其他附着物;3)机头传动滚筒与尾部滚筒不平行;4)传动滚筒、尾部滚筒轴中心线与机身中心线不垂直;5)托辊安装不正;6)给料位置不正;7)滚筒中心不在机身中心线上;8)输送带接头不正或输送带老化变质造成两侧偏斜;9)机身不正。
从受力分析的角度分为三种:第一种,皮带两侧张力不平衡;第二种,滚筒、托辊产生与皮带中心线偏斜的应力(即:侧向力);第三种,滚筒、托辊对皮带两侧摩擦力不平衡。
在实践中,总结出胶带的跑偏规律是:'跑松不跑紧'即:如果胶带两侧的松紧度不一样,则胶带向松的一侧跑偏。
'跑后不跑前'即:如果托辊支架等装置没有安放在胶带运行方向的垂直截面上,而是一端在前,一端在后(沿胶带运行方向),则胶带会向后端跑偏。
'跑大不跑小'即:滚筒与托辊两侧直径大小不一,输送带运行过程中就会向大的一侧跑偏。
'跑高不跑低'即:支承装置造成输送带两侧不在同一个水平面上,输送带运行中便向高的一侧跑偏。
辊面做成腰鼓形,中间直径大约要比两端直径大出2mm,均匀过渡,它有自回中能力,当然,需要输送带有一定的弹性。
调整胶带跑偏的方法可以归纳出以下几种:1.调整张紧机构法:皮带张紧处的调整是皮带运输机跑偏调整的一个非常重要的环节。
带式输送机驱动滚筒设计及校核

带式输送机驱动滚筒设计及校核已知参数:电机驱动功率N=75kw ,滚筒外径D=626mm ,滚筒长度L=1110mm ,滚筒侧板厚t1=25mm ,滚筒体板厚t2=20mm ,额定转速n=64r/min ,转矩11038Nm 。
则:滚筒线速度s m x x x D n v /1.210006062614.3641000*60===π圆周驱动力N xv p x Fn 375001.27510001000=== 设滚筒上平均张力为F ,紧边张力为F 1,松边张力为F 2,滚筒圆周驱动力为Fn ,过载系数为K 0;皮带与滚筒体间摩擦系数为μ=0.2,滚筒包角为α=200°=3.5弧度,则平均张力1.滚筒体取滚筒材料为235-A ,弹性模量E=2.06x105MPa ,泊松比γ=0.3,屈服强度σ0.2=235MPa ,密度g=7.85x10kg/mm 2。
滚筒体经简化如下图所示:采用sw 对滚筒进行有限元分析,两端为固定面,中部圆筒为受力面,单面受力,受力为F=59064N ,结果如下图所示: 1)对强度进行校核F e eF F nn 211=-=μαNx F K F F KF F nn 5906337500575.1*22*20021==+=+=应力MPa 4.34=σ<[σ]=σ0.2/n=235/4=58MPa ,安全系数n=3--4符合强度要求。
2)对刚度进行校核由图知:最大位移量为Y max 0.022mm 滚筒需用位移量可用公式[]28002D Y =计算,则[]447.028006262==x Y mm 得:Y max <[Y] 符合刚度要求。
2.滚筒端盖取滚筒材料为235-A,弹性模量E=2.06x105MPa,泊松比γ=0.3,屈服强度σ0.2=235MPa ,密度g=7.85x10kg/mm2。
端盖经简化如下图所示。
采用sw对滚筒进行有限元分析,内孔为固定面,外圈为受力面,受力为F=59064N,结果如下图所示。
带式输送机驱动力计算标准
带式输送机驱动力计算标准
带式输送机驱动力的计算标准通常遵循以下步骤:
1. 确定载荷:首先需要确定带式输送机所需搬运的物料的质量和流量。
2. 计算输送带张力:使用带式输送机的公式或计算方法,计算出输送带张力。
3. 计算摩擦阻力:根据输送带的长度、角度、支撑滚筒的数量、与物料的摩擦系数等因素,计算出输送带的摩擦阻力。
4. 计算惯性阻力:考虑到输送带和载荷的加速度和减速度,计算出惯性阻力。
5. 计算推力:将摩擦阻力和惯性阻力相加,得到带式输送机所需的总推力。
6. 选择驱动装置:根据总推力和输送带的速度要求,选择适当的电动机或其他驱动装置。
在进行带式输送机驱动力计算的过程中,可能还需要考虑一些其他因素,例如输送带的材质、传动装置的效率、额定功率等。
因此,在实际应用中,往往需要根据具体情况进行调整和修正。
带式输送机滚筒静平衡的原理和试验方法
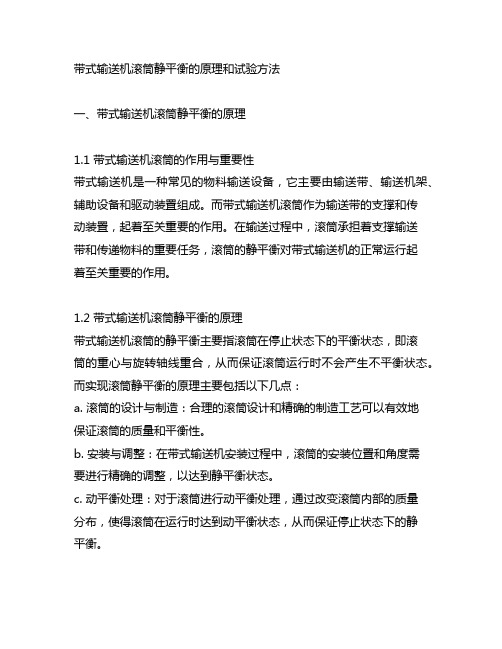
带式输送机滚筒静平衡的原理和试验方法一、带式输送机滚筒静平衡的原理1.1 带式输送机滚筒的作用与重要性带式输送机是一种常见的物料输送设备,它主要由输送带、输送机架、辅助设备和驱动装置组成。
而带式输送机滚筒作为输送带的支撑和传动装置,起着至关重要的作用。
在输送过程中,滚筒承担着支撑输送带和传递物料的重要任务,滚筒的静平衡对带式输送机的正常运行起着至关重要的作用。
1.2 带式输送机滚筒静平衡的原理带式输送机滚筒的静平衡主要指滚筒在停止状态下的平衡状态,即滚筒的重心与旋转轴线重合,从而保证滚筒运行时不会产生不平衡状态。
而实现滚筒静平衡的原理主要包括以下几点:a. 滚筒的设计与制造:合理的滚筒设计和精确的制造工艺可以有效地保证滚筒的质量和平衡性。
b. 安装与调整:在带式输送机安装过程中,滚筒的安装位置和角度需要进行精确的调整,以达到静平衡状态。
c. 动平衡处理:对于滚筒进行动平衡处理,通过改变滚筒内部的质量分布,使得滚筒在运行时达到动平衡状态,从而保证停止状态下的静平衡。
1.3 带式输送机滚筒静平衡原理的重要性带式输送机滚筒静平衡的重要性在于它直接关系到输送机的正常运行和使用寿命。
如果输送机滚筒处于不平衡状态,不仅会造成设备的振动和噪音,还会造成滚筒和输送带的磨损加剧,甚至影响输送机的安全运行。
实现滚筒的静平衡是带式输送机正常运行的基础。
二、带式输送机滚筒静平衡的试验方法2.1 静平衡试验装置带式输送机滚筒静平衡的试验主要是通过专用的试验装置进行。
这个试验装置主要包括挂载装置、滚筒支撑装置、测试仪器等。
通过这些试验装置的配合,可以对滚筒的静平衡状态进行精确的检测和调整。
2.2 静平衡试验步骤a. 将待测试的滚筒装入试验装置中,并要求其水平摆放。
b. 通过试验仪器对滚筒进行静平衡状态的检测,确定其不平衡量。
c. 根据不平衡量,采取相应的调整措施,如增加或减少配重等,使滚筒达到静平衡状态。
d. 经过多次调整和检测,直到滚筒在停止状态下达到理想的静平衡状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
皮带机驱动和改向滚筒静平衡计算和试验方法
静平衡检测要求应符合下式:
P〈=[P] kg
式中:P-----检测不平衡重量 kg
[P]-----不平衡重量许用值,kg;
[P]=40*W/V kg
W----滚筒滚动体的总质量,kg;
V----皮带带速,mm/s;
当检测结果为P〈=[P]时不必进行平衡施工,反之则进行平衡施工。
静平衡实验的方法:
1、采用型钢制作两条滑道,要求滑道上表面水平,其间距能满足将滚筒的两侧轴放到上边的要求。
2、将滚筒放到滑道上。
3、由于存在重心偏移滚筒发生转动。
4、根据计算的[P]值制作试块。
5、将试块焊接到已经转动后的滚筒的上部边缘上。
6、焊接后在将滚筒放到滑道上,若此时滚筒焊接试块的一点转到下面,则可取下试块,滚筒不加调整即可满足要求。
若加上试块放到滑道上后相对角度位置未发生变化,说明重心偏移过大,此时需加以调整,进行平衡施工,在现在位置的上部滚筒轮辐出靠近筒皮处筒的两短开孔插入圆钢后焊接,焊后再重复上述试验直到满足前述条件。