现代控制理论(第三章)
现代控制理论课件chapter3

L10
Chapter 3 Controllability and Observability of Linear Control Systems
引言
古典中:Y(s)既是输出又是被控量
(1)、 Y(s)肯定与R(s)有关系 , (2)、 Y(s)肯定是可测量的。 因此,只要满足稳定,肯定能控能观
Modern Control Theory
现代控制理论 Modern Control Theory
沈阳建筑大学 信息与控制工程学院
第三章
线性控制系统的能控性和能观测性
Chapter 3 Controllability and Observability of Linear Control Systems
L10
Chapter 3 Controllability and Observability of Linear Control Systems
t0 t
若状态x(t 0 )为能控的,则有u (t )使x(t f ) 0 x(t f ) (t f , t 0 ) x(t 0 )
1
tf
t0
(t f , ) B( )u ( )d 0
因此x(t 0 ) (t f , t 0 ) x(t 0 )
tf
t0
(t f , ) B( )u ( )d
tf
t0
(t 0 , ) B( )u ( )d
Modern Control Theory
L10
Chapter 3 Controllability and Observability of Linear Control Systems
3.1.1 时变系统的能控性
现代控制理论第3章
(t f )]
X(0) B
AB
f 0 (t f ),
,f
n1
(t f )
2 rank [ B AB A B
A n1B] n
2 P2 A ( P A ) A P A P3 1 1 3 P3 A ( P2 A) A P A P4 1
n 1 Pn 1 A ( Pn 2 A) A P A Pn 1
P P 1 1 P P A P 2 1 , 其中P 1 ? n 1 P P A n 1 P 0 1B P AB 0 , 转置以后得 PB 1 n 1 P A B 1 1 1B P P 1 B P 1 AB AB
3.2控制系统的能观性
自动化学院 CISIA
一.能观性定义
定义: 对于线性定常系统 x Ax Bu, y Cx
在任意给定的输入 u(t) 下,能够根据输出量 y(t) 在
有限时间区间 [t0,tf] 内的测量值,唯一地确定系统
在 t0 时刻的初始状态 x(t0 ),就称系统状态x(t0 )是
X AX BU X PX Y CX
Y CX
X AX BU
A P 1 AP P非奇异 其中 B P 1B A与A为相似矩阵 C CP
det A det A, Rank ( A) Rank ( A)
a
i 1
n
ii
a ii ,
2.问题的提出 能控性问题?
现代控制理论-线性控制系统的能控性与能观性例题精选全文完整版
如果线性定常系统: y Cx 是状态不完全能控的, 它的能控性判别矩阵的秩
rankM n1 n
则存在非奇异变换:x Rcxˆ
将状态空间描述变换为:
xˆ y
Aˆ xˆ Cˆ xˆ
Bˆ u
n1 n n1
其中:
xˆ
xˆ1
xˆ
2
n1
n n1
Aˆ
R c1AR c
Aˆ 11 0
3.6.1 线性系统的对偶关系
线性系统1、2如下:
1:yx 11
A1x1 C1x1
B1u1
2:
x 2 y 2
A2x2 C2x2
B2u2
如果满足如下关系
A2 A1T , B2 C1T , C2 B1T
则称两系统是互为对偶的.
u1(t) B
x1(t)
x1(t)
++
∫
y1(t) C
A
y2(t) BT
0
A 0 1 0 , b 0, c 1 1 1
1 4 3
1
解: 能控性矩阵
0 1 4
M b Ab A2b 0 0
0
1 3 8
rankM 2 n1 dim A n 3 不能控
构造变换矩阵
0 1 0 Rc 0 0 1
1 3 0
✓与前2个列向量 线性无关; ✓尽可能简单
结构分解
u
co
y
co
依据能控能观 性,将系统分解
co
为四个子系统
co
x Ax Bu
y Cx Du
特殊的线性变换
x xTco xTco xTco xTco
分解步骤:
1、将系统分解成能控与不能控子系统;
现代控制理论3 第三章 线性系统的可控性和可观测性

A'
0
0
0
a0 a1 a2
0
0 可
0
0
B'
控 标
1
an1
0 1
准 形
AT=A’
BT=B’
0 0 0 1 0 0 A 0 1 0
a0
a1
C 0
0 1
0 0
a2
可观标准形
1 an1
结论:状态方程具有可观测标准形的系统一定可观测。
C 0 0
CA
0
0
V
CA2
3.2线性定常系统的可观测性
1.线性定常离散系统状态可观测性
(1) 离散系统可观测定义
x(k 1) Gx(k) Hu(k ) y(k) Cx(k) Du(k)
已知输入u(0),…,u(n-1)的情况下,通过在
有限个采样周期内测量到的输出y(0),y(1),…, y(n-1),能唯一地确定任意初始状态x(0)的n个分量, 则称系统是完全可观测的,简称系统可观测。
(2) 线性定常连续系统可控性判据
若线性定常连续系统的状态方程为
x Ax Bu
则该系统可控的充分必要条件为其可控性矩阵
Sc B AB
满秩,即 rankSc n
An1B
示例
(3) 可控标准形
结论:状态方程具有可控标准形的系统一定可控。
x1 0
x2
0
xn
1
0
xn a0
使上述方程组有解的充分必要条件是
Sc' Gn1H
GH H
满秩,且 rankSc' n
亦即 Sc H GH
Gn1H 且rankSc n
离散可控性例题
现代控制理论习题解答(第三章)
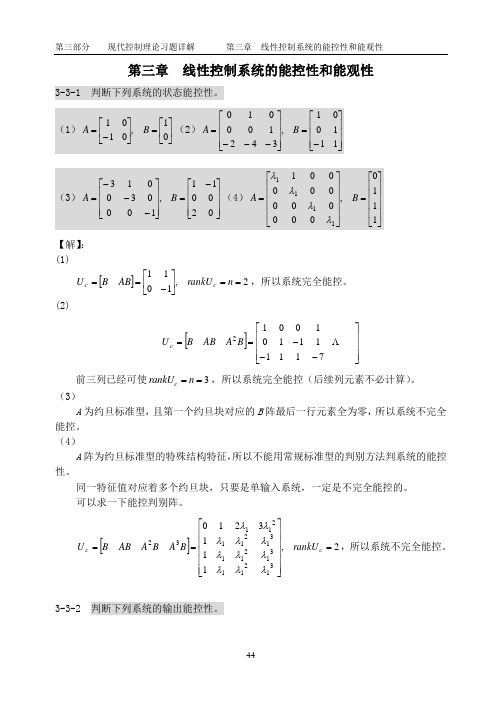
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
现代控制理论第三章PPT
( A
c1
,bc1 ) 的能控性,其中
1 0 0 0 A c1 0 0 2 5
解:
0 0 1 0 0 1 1 10
0 0 b c1 0 1
0 1 0 0 0 0 1 10 A3 c1b c1 0 1 10 101 1 10 101 1025
若取
u( t ) B( t )T ΦT ( t0 ,t )Wc1( t0 ,t f )x( t0 )
tf t0
x( t f ) Φ( t f ,t0 )[ x( t0 )
Φ( t0 ,t )B( t )B( t )T ΦT ( t0 ,t )Wc1( t0 ,t f )x( t0 )dt ]
( k 1,2, , n 1 )
假设 F( t ) Φ( t0 ,t )B( t ) 对上式关于时间t求一阶、二阶、直至n-1阶导数 ,可得
(t ) Φ (t , t )B(t ) Φ(t , t )B (t ) F 0 0
(t ) Φ(t0 , t )A(t )B(t ) Φ(t0 , t )B
实现最优控制和最优估值及其它系统综合
与校正的必要条件。
4.1 系统的能控性
[定义]设系统的状态方程为
(t ) A(t )x(t ) B(t )u(t ) x
对于任意非零初始状态 x(t0 ) ,如果存在容许控制u(t ) ,在有限时区
t [t0 , t f ] 将其转移到状态空间原点,即 x(t f ) 0 ,则称系统在
(t )] Φ(t0 , t )[A(t )B(t ) B
Φ(t0 , t )B1 (t )
现代控制理论第三章
方法二:
转化为约旦标准形 ( Aˆ, Bˆ ) ,再根据 Bˆ 判断
方法三: 传递函数
3.2 线性连续系统的能控性
方法一:线性定常连续系统(A,B), 其状态完全能控的 充要条件是其能控性矩阵的秩为n,即:
rankQc = n Qc = [ B AB A2B … An 1B ]
0 0 2
3
4 1 0
4 2
(2)
x (t)
0
4
0 x(t) 0 0u(t)
0 0 2
3 0
3.2 线性连续系统的能控性 方法三:
3.2 线性连续系统的能控性 例:从输入和状态矢量间的传递函数确定其能控性?
3.2 线性连续系统的能控性 例:判断线性连续系统能控性?
解:
3.2 线性连续系统的能控性
3.3 线性系统的能观测性
例:判断能观测性?
x (t)
2 1
1 3
x(t
)
1
1
u(t)
y(t
)
1 1
0 0 x(t)
解:
C Q0 CA
10 1 0
2 1 2 1
rankQo = 2 = n
系统能观测
3.3 线性系统的能观测性
例: 若系统的状态空间表达式为
x (t)
a d
5
x(t
)
1
7
(2)
x (t)
5
x(t)
1
y(t) 0 4 5x(t)
3 2 0 y(t) 0 3 1 x(t)
(3)
3 1 0
0 3 1
x (t) 0 0 3
x(t)
2
现代控制理论第三章
B
AB
0 1 An 1B n 1
如果系统是能控的,对于任意给定的初始状态x(0)都 能解出 i , i 0, , n 1,其有解的充分必要条件为
rank B AB An 1 B n
判断下面系统的能控性
输出能控性定义:如果系统的输入信号能在有限的 时间区间[t0,tf]内,将系统的任意初始输出转移到y(tf), 那么该系统为输出完全能控的。
输出能控性判据:考虑系统
x ' Ax Bu y Cx Du
状态完全能控的充分必要条件是
rank CB CAB CAn 1 B D m
上式表明,根据在[0,tf]时间的量测值y(t),能够 将初始状态x(0)唯一地确定下来的充要条件是
C CA n rank n 1 CA
(1)在能观测性定义中之所以把其规定为对初始 状态的确定,是因为一旦确定了初始状态,便可以 根据给定的输入信号u(t),利用状态转移方程求出系 统在各个瞬时的状态。 (2)能观测性表示的是y(t)反映状态向量x(t)的能 力,考虑到输入信号u(t)所引起的输出是可计算的, 所以在分析能观测性问题时,常令u(t)=0。
S1的能控性等价于S2的能观性
S1的能观性等价于S2的能控性
四、能控标准型和能观标准型(单变量系统线性系统) 1 、能控标准型 若系统的状态空间表达式为:
x ' Ac x bcu y Cc x
0 Ac 0 an
1 0 an 1
0 1 a1
能控性判据:考虑系统
x ' Ax Bu
状态完全能控的充分必要条件是
rank B AB An 1 B n
现代控制理论第三章线性系统的能控性和能观测性
1 x1 u x 2 2 x2 u x y x x 1 2
1 x
u
1 s 1 s
2
x1
y
x2
2 x
由于状态变量x1、x2都受控于输入u,所以系统 是能控的;输出y能反映状态变量x1,又能反映状 态变量x2的变化,所以系统是可观测的。 即状态变量x1能控、可观测;状态变量x2能控、 可观测。
任意初态 x(t0 ) x 零终态 x(t f ) 0
状态完全能控
Байду номын сангаас
第 三章 线性控制系统式的能控性和能观测性
②把系统的初始状态规定为状态空间的原点, 即 x(t 0 ) 0,终端状态规定为任意非零有限点, 则可达定义表述如下: 对于给定的线性定常系统
Ax Bu ,如果 x
存在一个分段连续的输入 u (t ),能在 [t 0 , t f ] 有限时间间隔内,将系统由零初始状态 x(t 0 ) 转移 到任一指定的非零终端状态 x(t f ) ,则称此系统 是状态完全可达的,简称系统是可达的(能达的)。 任意初态 x(t0 ) 0 零终态 x(t f ) x 状态完全可达
第 三章 线性控制系统式的能控性和能观测性
1. 直接由A,B矩阵的结构判断系统的能控性 定理: 系统
( A, B )
即
A(t )x B(t )u x y C (t )x D(t )u
状态完全能控的充分必要条件是其能控性矩阵
Qk [ B AB A2 B An1 B]
一、线性定常连续系统状态能控性的定义 定义3.1(状态能控性定义):
Ax Bu,如果存在一个 对于线性定常系统 x 分段连续的输入u(t),能在有限时间间隔[t0,tf]内, 使得系统从某一初始状态x(t0)转移到指定的任一 终端状态x(tf) ,则称此状态是能控的。若系统的 所有状态都是能控的,则称此系统是状态完全能 控的,简称系统是能控的。
现代控制理论--第三章 3 能观性
J2
⎢
⎣
⎤
⎥
⎥ ⎥
X
+
BU
,Y
=
CX
J
n
⎥ ⎦
中,和每个约当块 Ji (i = 1,2, , k) 的首行相对应的C 阵中的那些相应列,其每列 元素不全为零。
若两个约当块有相同特征值,上述结论不成立;若想要上述结论成立,则需
要对应的C 阵中相应列是线性独立的。
综上可知,能观标准型实现一定能观;能观,则通过线性非奇异变换一定能 化成能观标准型实现。能控标准型实现一定能控;能控,则通过线性非奇异变换 一定能化成能控标准型实现。线性非奇异变换不改变系统的能控能观性。
n−1
∑ Y (t)凯-哈定理 b j (t)CA j X (0) j=0
(2)
〔1〕 SO 系统时: 即 C1×n 。
3
第三章 线性系统的结构特性
此时,下列的几个量都是标量: β0 = CX (0), β1 = CAX (0), β n−1 = CAn−1 X (0)
(3) → (2) :
(3)
λI − A = λI − AT = λI − A = 0
○3 互为对偶的系统的传递矩阵互为转置:
G (s) = C (sI − )A −1 B
( ) ( ) G ( s) = C sI − A −1 B = BT sI − AT −1 CT
=
BT
⎡⎣( sI
) −
A
T
⎤ ⎦
−1
C
T
=
BT
⎡⎣( sI
−
)A
−1 ⎤T ⎦
CT
=
⎡⎣C (sI
−
)A −1
B
⎤T ⎦
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x1 x2
1 0u
有全零行 系统不可控!
x1 8 0 0 x1 0 1
2、
x2
0
10x2来自30ux3 0 0 2x3 0 2
没有全零行 系统可控!
x1 4 1 0 x1 0
3、
x2
0
4
0
x2
4
u
x3 0 0 2 x3 3
状态完全能控
4、
x1 4 1
(1)
或 (2)
式中
EAST CHINA INSTITUTE OF TECHNOLOgy
EAST CHINA INSTITUTE OF TECHNOLOgy
为简明起见,下面列举三个具有上述类型的二阶系统,对其能控性加以 剖析。
(3)
(4)
(5)
EAST CHINA INSTITUTE OF TECHNOLOgy
性之间的关系
EAST CHINA INSTITUTE OF TECHNOLOgy
初步了解可控性和可观测性 20世纪60年代初,由卡尔曼提出,与状态空间描述相对应。
可控性:反映了控制输入对系统状态的制约能力。 输入能否控制状态(控制问题)
可观测性:反映了输出对系统状态的判断能力。 状态能否由输出反映(估计问题)
3.1 能控性的定义
3.2 线性定常系统的能控性判别 3.3 线性连续定常系统的能观性 3.4* 离散时间系统的能控性与能观性 3.5* 时变系统的能控性与能观性 3.6 能控性与能观性的对偶关系 3.7 状态空间表达式的能控标准型与能观标准型 3.8 线性系统的结构分解 3.9 传递函数阵的实现问题 3.10 传递函数中零极点对消与状态能控性和能观
是能控的。若系统的所有状态都是能控的,则称此系统是状态完全能控的,
或简称系统是能控的。
几点说明:
1)在线性定常系统中,为简便计,可以假定初始时刻 为 ,而任意终端状态就指定为零状态。即
,初始状态
EAST CHINA INSTITUTE OF TECHNOLOgy
2)也可以假定 =0,而工 为任意终端状态,换句话说,若存在
x2
0
4
x3
x4
0
0 1
1
x1 1
x2
0
x3 0
0
1
x4
0
0 0 0 1
1 2 u 0 0
状态完全能控
教材[例3-2;3-3]:当状态空间表达式不为约当标准型时,先进行线性变换!
EAST CHINA INSTITUTE OF TECHNOLOgy
3.2.2 直接从A与B判别系统的能控性
1.单输入系统 线性连续定常单输入系统:
其能控的充分必要条件是由 A、b 构成的能控性矩阵:
满秩,即
。否则,当
(14) 时,系统为不能控的。
例[3-4]----------三阶能控标准型,无论系数如何取,都可控。
注:输入与状态矢量间的传递函数也可以判断能控性:无零极点对消的情况
[例3-6;3-7]
EAST CHINA INSTITUTE OF TECHNOLOgy
•系统矩阵A有相同特征值时— T1B 中与互异特征值部分对应的行中无全 零行;T1B 中与相同特征值部分(即约当块)最后一行对应的行非全零行。
EAST CHINA INSTITUTE OF TECHNOLOgy
[例3-1]:判别下列对角标准型线性定常系统的可控性。
1、
x1 x2
2
0
0 1
例:已知系统的动态方程,理解--可控性、可观测性提出的目的。
EAST CHINA INSTITUTE OF TECHNOLOgy
x1
x2
4 0
0 5
x1 x2
1 2u
y 0
6
x1 x2
x1 4x1 u x2 5x2 2u y 6x2
u
u可以控制 x1, x2
y无法反映 x1
(3) (4)
(5)
1)对于式(3)的系统,系统矩阵A为对角线型,其标量微分方程形式为(图3-3)
(6)
不可控
(7)
2)对于式(4)的系统,系统矩阵A为约旦型,微分方程组为(图3-4)
(8) 可控
(9)
3)对于式(5)的系统,系统矩阵虽也为约旦型,但控制矩阵第二行的元素
却为0,其微分子方程组为(图3-5):
(10)
(11)
不可控
EAST CHINA INSTITUTE OF TECHNOLOgy
2.具有一般系统矩阵的多输入系统
系统的状态方程为:
(12)
若进行非奇异线性变换将其变换为约当标准型:令 x Tz
z Jz T 1Bu
非奇异线性变换不改变系统的能控性!
一般系统的能控性判据:
•系统矩阵A的特征值互异,则 T1B 无全零行;
3.2.2 直接从A与B判别系统的能控性
2.多输入系统
对多输入系统,其状态方程为:
式中,B 为
阶矩阵; 为 r 维列矢量。
其能控的充分必要条件是矩阵:
(15) 的秩为 。
注: •1.因M可能非方阵,在实际中考虑到rank(M)=rank(MM’),通过 求rank(MM’)判断系统的能控性。 •2.按能控性定义,找到u(t)将初始状态转移到零点。实际中u(t)并 不唯一。
一个无约束控制作用
,在有限时间
内,能将 由零状态驱
动到任意
。在这种情况下,称为状态的能达性。
3)在讨论能控性问题时,控制作用从理论上说是无约束的,其取值并非
唯一的,因为我们关心的只是它能否将
驱动到
,而不计较
的轨迹如何。
2.线性连续时变系统的能控性定义
线性连续时变系统:
3.离散时间系统 这里只考虑单输入的n阶线性定常离散系统:
EAST CHINA INSTITUTE OF TECHNOLOgy
EAST CHINA INSTITUTE OF TECHNOLOgy
3.2 线性定常系统的能控性判别
线性定常系统能控性判别准则有两种形式,一种是先将系统进行状态变
换,把状态方程化为约旦标准型
,再根据 阵,确定系统的能控性;
另一种方法是直接根据状态方程的 A 阵和 B 阵,确定其能控性。
3.2.1 具有约旦标准型系统的能控性判别 1.单输入系统 具有约旦标准型系统矩阵的单输入系统,状态方程为:
4
x1 x1
系统完全可控! 系统不完全可观!
x2 x2 6 y
5
EAST CHINA INSTITUTE OF TECHNOLOgy
3.1 能控性的定义
1.线性连续定常系统的能控性定义 线性连续定常系统:
如果存在一个分段连续的输入 ,能在有限时间区间
内,使
系统由某一初始状态 ,转移到指定的任一终端状态工 ,则称此状态