空间杆件结构的有限单元法.

第二章 空间杆件结构的有限单元法 第一节 局部坐标系下的单元分析
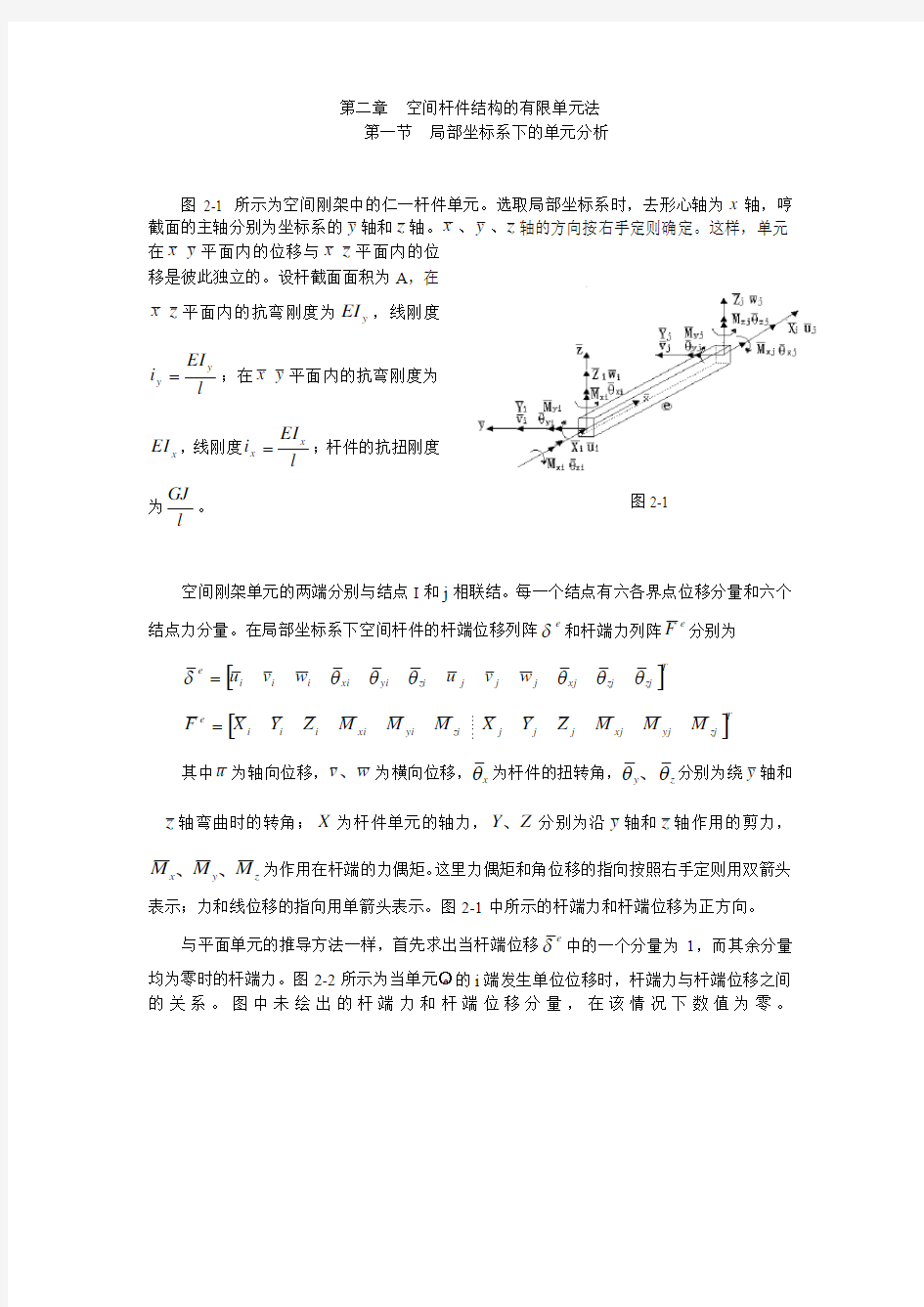
图2-1 所示为空间刚架中的仁一杆件单元。选取局部坐标系时,去形心轴为x 轴,哼截面的主轴分别为坐标系的y 轴和z 轴。x 、y 、z 轴的方向按右手定则确定。这样,单元在x y 平面内的位移与x z 平面内的位移是彼此独立的。设杆截面面积为A ,在
x z 平面内的抗弯刚度为y EI ,线刚度
l
EI i y y =
;在x y 平面内的抗弯刚度为
x EI ,线刚度l
EI i x
x =
;杆件的抗扭刚度为
l
GJ
。
空间刚架单元的两端分别与结点I 和j 相联结。每一个结点有六各界点位移分量和六个结点力分量。在局部坐标系下空间杆件的杆端位移列阵e
δ和杆端力列阵e
F 分别为
[]T
zj zj
xj j j j
zi
yi xi i i i
e w v u w v u θθθθθθδ=
[
]T
zj
yj xj
j
j
j
zi
yi
xi
i
i
i
e M M M Z Y X M M M Z Y X F =
其中u 为轴向位移,w v 、为横向位移,x θ为杆件的扭转角,z y θθ、分别为绕y 轴和
z 轴弯曲时的转角;X 为杆件单元的轴力,Z Y 、分别为沿y 轴和z 轴作用的剪力,
z y x M M M 、、为作用在杆端的力偶矩。
这里力偶矩和角位移的指向按照右手定则用双箭头表示;力和线位移的指向用单箭头表示。图2-1中所示的杆端力和杆端位移为正方向。
与平面单元的推导方法一样,首先求出当杆端位移e
δ中的一个分量为1,而其余分量
均为零时的杆端力。图2-2所示为当单元○
e 的i 端发生单位位移时,杆端力与杆端位移之间的关系。图中未绘出的杆端力和杆端位移分量,在该情况下数值为零。
图2-1
依同样方法可以确定当单元j 端发生单位位移时,杆端力与杆端位移之间的关系。 当单元的杆端位移分量为任意值时,可以写出空间单元刚度方程,以矩阵表示为???????????????
????????????????????????????????????????????????????????????????????????
????
??????
???????
???
????????
?-----------------=??????????????????????????????????????????????????zj yj xj j j j zi yi xi i i i z z z z y y y y y y y y z z z z z z z z y y y y y y y y z z z z zj yj xj j j j zi yi xi i i i w v u w v u l EI l EI l
EI l EI l EI l EI l EI l EI l GJ l GJ l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA
l EI l EI l EI l EI l EI l EI l EI l EI l GJ l GJ
l EI l EI l EI l EI l EI l EI l EI l EI l EA l
EA
M M M Y X M M Z Y X θθθθθθ 40
60
20
600406000206000000000000
06012000601200600012060001200000000000200060400060020600040600
0000000000
06012000601200600012060001200
0000000002
22223232
32322
2223232323
(2-1)
式(2-1)可以简写为
e e e k F δ= (2-2)
其中单元刚度矩阵为
???????????????????
???????????????????
???
??????
???
???????
????????
?---
---
-----
-
--
--
-
=l EI l EI l
EI l EI l EI l EI l EI l EI l GJ l GJ l EI l EI l EI l EI l EI l
EI l EI l EI l EA l EA
l EI l EI l EI l EI l EI l EI l EI l EI l GJ l GJ
l EI l EI l EI l EI l EI l EI l EI l EI l EA l
EA
k z z z z y y y y y y y y z z z z z z z z y y y y y y y y z z z z e 40
60
20
60040600020600
0000000000
06012000601200600012060001200000000000200060
400060
0206000406000000000000
06012000601200600012060001200
0000000002
22223232
32
32
2
2223232323 (2-3)
式(2-3)为局部坐标系中的空间单元刚度矩阵。它是12阶方阵,其性质也与平面结构 的相同。
第二节 空间单元坐标变换
将局部坐标系下的单元刚度矩阵转换为整体坐标系下的单元刚度矩阵,是通过坐标转
换矩阵完成的。首先考虑单元○
e 在端点i 的三个杆端力分量,在局部坐标系z y x 中,它们是i i i Z Y X 、、;在整体坐标系xyz 中,是i i i Z Y X 、、与i i i Z Y X 、、之间的关系。设x 轴与
x 、y 、z 轴的夹角分别为z x y x x x 、、(图2-3),则x 轴在xyz 坐标系中的方向余弦为
)
,cos(),cos(),cos(z x l y x l x x l z x y x x x === 将杆端力i i i Z Y X 、、在x 轴上头英,可求得杆端力
z x i y x i x x i i l Z l Y l X X ++=
同理可得
z
z i y z i x z i i z y i y y i x y i i l Z l Y l X Z l Z l Y l X Y ++=++=
综合上三式
????
???
????????????????
?=????????????i i i z z y
z x z z y y y x y z x y x x x i i i Z Y X l l l l l l l l l Z Y X (2-4) 这就是在端点i 由整体坐标系中的杆端力i i i Z Y X 、、推算局部坐标系中杆端力i i i Z Y X 、、的转换关系式。其中两坐标系的转换矩阵(简称“关系矩阵”
)为 ????
?
??????
?=z z y
z x z z y y y x
y z x y x x
x l l l l l l l l l t (2-5) 参照上述方法,同样可以推出以zi yi xi M M M 、、表示i z i y i x M M M 、、,以
j j j Z Y X 、、表示j j j Z Y X 、、,以zj yj xj M M M 、、表示j z j y j x M M M 、、的表达式,其
转换矩阵也是t 。
综合以上分析,整体坐标系中的单元杆端力分量列阵F ○e
与局部坐标系中单元杆端力分量列阵e
F 之间的关系,可用下时表达
e e e F T F = (2-6)
同理,可导出整体坐标系与局部坐标系杆端位移之间的转换关系
e e e T δδ= (2-7)
在以上两式中
???????
?
????
????=t t t t T e
000000000000 (2-8) 称为“单元坐标转换矩阵”;它是12×12阶矩阵,是一个正交矩阵,故有
eT e T T =-1 (2-9)
在平面结构中,确定了单元的两个结点i 和j 的坐标,就确定了杆剪的位置。在空间
结构中,仅仅确定两个端点的坐标还不能完全确定刚架杆件在空间的位置,因为相同的ij 杆,其截面形心主轴认可由不同的方向。为确定刚架杆件在空间的确切位置,还需要在杆轴
线外在取一点k ,以确定其形心主轴的方向。
取结构的整体坐标系为xyz ,单元局部坐标系为z y x ,y O 为杆件截面形心主轴之一,如图2-4所示。单元的位置由i 、j 、k 三个点的坐标决定。这里i 为单元起始结点号,j 为单元终点号,由i 、j 两点可确定x O 的方向。K 点在单元所在的y O x 平面内,但又不在x 轴上,如果刚架上找不到合适的点,可用一个假想的点代替。
以i 、j 、k 三点在整体坐标系xyz 中的坐标分别为(x i 、y i 、z i )、(x j 、y j 、z j )、(x k 、y k 、z k ),那么如何根据这三个点的坐标值来确定坐标系的关系矩阵t 中的九个元素呢?t 中的第一行元素较容易确定。如图2-4可得
?
???
???
??-=-=-=l z z l l y y l l x x l i j z
x i j y x i j x x (2-10)
其中l 为杆长,可按下式求得
222)()()(i j i j i j z z y y x x l -+-+-= (2-11)
设i 、j 、k 分别为三个坐标轴方向的单位矢量,x O 轴矢量x 可表示为
k l j l i l x z x y x x x ++= (2-12)
因为z O 轴的矢量z 与平面ijk 垂直,所以有
j
k j
k j
k i k i k i
k z z x y x x z z y y x x k
j i
k j k i z ------=?=)()(
(2-13) 为后面的运算方便,可设
j
k j
k i k i k j k j
k i k i k j k j k i k i k y y x x y y x x XY z z x x z z x x ZX z z y y z z y y YZ ----=
-----
=----=
则有 X Y k Z X j Y Z i Z ++=
z O 轴的方向余弦为
?
?
?
??
===222///l XY l l ZX l l YZ l z x y x x x
式中
2222)()()(XY ZX YZ l ++= (2-16)
由于y O 轴与x O 轴垂直, y O 轴与z O 轴垂直,且y O 的方向余弦之和等于1,于是有
1
0)(0
222=++=??=?z y y y x y l l l k i x y x y
以上三式可组成联立方程
?
?
?
?
?
?
?
??
=++=---=++100
222z y y y x y i k i k i k z x y x x x z y y y x y z x z y y x y y x x x y l l l z z y y x x l l l l l l l l l l l l (2-20)
解式(2-20)的联立方程,可得
?
?
?
??
===333231///l S l l S l l S l z y y y x y (2-21)
式中
3
2221232
3222
1))(1()()()
())(1()()()())(1(S S S l z z l y y l l x x l l S z z l l y y l x x l l S z z l l y y l l x x l S i k z
x i k y x x x i k x x z x i k z x y x i k y x i k x x y x i k z x x x i k y x x x i k x x ++=--+----=----+--=------=
由式(2-10)、式(2-15)和式(2-21)便可确定坐标关系矩阵t 。 将式(2-6)和式(2-7)代入式(2-2),化简整理后,可得空间刚架杆件单元整体坐标系中的单元刚度方程
e e eT e T k T F δ= (2-22)
设 e e eT
e
T k T
k = (2-23)
则 e
e
e
k F δ= (2-24)
e k 为空间单元在整体坐标系中的单元刚度矩阵。式(2-23)为两种坐标系的单元刚
度矩阵的转换关系式。式(2-24)和式(2-23)在形式上与平面结构的公式一样。
第三节 空间刚架分析举例
空间刚架整体刚度矩阵K 的形成、结点荷载列阵的形成和支承条件的引入,均与平面刚架的处理方法相同。
例2-1试求图2-5a 所示空间刚架B 结点的位移及各杆内力。设各杆的材料和几何性质相同。
.
/15,10,100.3,102.1,106.2,3.2,005.0,109,101.24
5
4
5
45242m kN q kN P m I m I m J m l m A GPa G GPa E z y ==?=?=?===?=?=---
(矩形截面梁在扭转时将发生翘曲。本题中杆件为实体截面,约束所引起的附加正应力已略去,J 为“相当极惯性矩”。) 解:(1)确定结点,划分单元,建立坐标系。括号内数字为结点位移编号,见(图2-5b )。 (2)形成局部坐标系中的单元刚度矩阵e
k
m kN l EI m kN l EI kN l
EI kN l EI m kN l EI m kN l EI m
kN l
EI m kN l EI m kN EI m kN EI m kN l
GJ
m kN l
EA
z y
z
y
z z
y
y
z y /104688.512,/101875.212105626.66,10625.261005.14,1025.52102.44,
101.22103.6,1052.21075.9,/10375.43
3
3
3
32
32
4
333
23325?=?=?=?=??=??=??=??=??=??=??=?= 将以上数据代入式(2-3),得局部坐标系中的单元刚度矩阵
??
??
??
??
????????????????
??????????????????????????----------------=
105000006562052500006562004200026250002100026250000975000009750000262502188000262502188006562000546906562000546900000043750000000437500000065620105000006562000026250004200026250000955000009750000262502188000262502188006562000546906562000546900000043750000000437500
1k 12k k =
(3)形成整体坐标系中的单元刚度矩阵
单元①:1
1
k k
=
单元②:先形成关系矩阵t 和单元坐标转换矩阵T ,见式(2-5)和式(2-8)。根据单元②
的局部坐标系与整体坐标系之间的关系(图2-6),可得
?????
???????=001010100t
单元坐标转换矩阵为
?????
???????????????????
?
?????????????
????????????----=00
1
010000000000100000000000000001000000000010000000000100000000000000001000000000010000000000100000000000000001000000000010000000000100T 根据单元刚度矩阵的转换关系
e e eT e T k T k =
可求得整体坐标系中单元②的单元刚度矩阵
????
????
????????????????
??????????????????????????----------------=
9750000097500000042000002625021000002625
00105000656200052500656200004375000000043750000
006562054690006562054690026250002188026250002188975000009750000002100000262504200000262500006562000105000656200004375000000043750000006562054690006562054690026250002188026250002188
2
k (4)根据直接刚度法组集整体刚度矩阵。以下所列为以子块表示的整体刚度矩阵,各子块中的元素由21
k k
和中的元素组成。
?????
?
?????
?+=3222
111100jj ji
ij ii
jj ji
ij
ii k k k k k k k k K (5)引入支承条件,修改整体刚度矩阵K ,可得修改后的整体刚度矩阵
???????
????
???????
??????----=1147500065620084000262502625001147506562002625043968700656206562010937002625000439687
F K (6)组集结点荷载列阵P 0,并引入支承条件,求自由结点荷载列阵P F 。
单元①、单元②的固端力分别为
[]
[]
T
f
T
f F F 2.70001802.700018030005030005021-=-=
单元①、单元②的等效结点荷载
[]
[]
T
e T
e e
f eT e e P P F T P 2.70001802.700018030005030005021---=---=-=
整个结构的总载荷列阵
[]
T
P 002.70180302.702303000500-----=引入支承条件修改后
[]
T
F p 302.70230--=
(7)解方程,求自由结点位移。
由引入支承条件后整个结构的刚度方程:
F F F P K =?
求得自由结点位移
[]T
F 33
3
105997.20102337.20100029.50---?-??-=?
进而可确定整体坐标系下各单元的杆端位移
[]
[]
T
T 000000105997.20102337.20100029.50105997.20102337.20100029.5000000033323331------?-??-=?-??-=δδ
(8)求单元的杆端力 单元①:
[]
T
f k T F F 5347.201718.20299.50183.2201778.20299.1501
1111--=+=δ
单元②:
[]
T
f k T F F 305.2805374.20701.3001778.205347.20299.502
2222---=+=δ(9)绘内力图。结果如图2-7所示。
空间问题的四面体单元
第三章 轴对称、三维和高次单元 § 3-2空间问题的四面体单元 空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完 全相同。由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方 程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题 和平面问题大得多。它要求计算机的内存大,且计算时间长,费用高。这些问题都给三维 有限单元法的具体运用带来许多困难。 和平面问题一样,空间有限单元法采用单元 也是多种多样的,其中最简单的是四节点四面体 单元。采用四面体单元和线性位移模式来处理空 间问题,可以看作平面问题中三角形单元的推广。 在采用四面体单元离散化后的空间结构物 中,一系列不相互重叠的四面体之间仅在节点处 以空间铰相互连接。四节点四面体单元仅在四个 顶点处取为节点,其编号为i,j,m,p 。每个单元的 计算简图如图3-7所示。 在位移法中,取节点位移为基本未知量,四 节点四面体单元共有十二个自由度 (位移分量), 其节点位移列阵为 U i V i W i (i,j,m) 相应的节点力列阵为 U i V i w i U j V j w j U m T W m U p V p W p 其子矩阵 图3-7空间四面体单元
F i F j F m F p
其子矩阵 F i U i V i w 一、单元法位移函数 结构中各点的位移是坐标 X 、 y 、z 的函数。 当单元足够小时, 单元内各点的位移可用 简单的线性多项式来近似描述, 即 u 1 2 X 3y 4Z v 5 6 X 7 y 8 Z (3-49) w 0 10X ny 12Z 曰 2,…, 12是 卜二个待定系数,它们可由单元的节点位移和坐标确定。假定节 点 i,j,m,p 的坐标分别为(x i y i Z i )、 、(x j y j z j ) 、(X m 将它们代入 (3-49)式的第一式可得各个节点在 X 方向的位移 U i 1 2X i 3Y i 4 Z u j 1 2X j 3Y j 4Z j U m 1 2 X m 3Y m 4 Z m U p 1 2 X p 3 Y p 4 Z p 解上述线性方程组,可得到 1 , 2 , 3 , 4 , 再代入 U 6V [(a i bX cy d i Z)U i (a j b j x (a m b m X C m y d m z)U m (a p b p X C (3-50) y d p Z )U p ] 1 X i Y i Z i 1 X j y j Z j 1 X m y m Z m 1 X P Y P Z P (3-52) (3-50)式,得 y m Z m )、(X p y p Z p ), 5y 3)5 (3-51) 式中1 , 其中V 为四面体ijmp 的体积,a,b i ,…,c p ,d P 为系数。
第五章薄壁空间结构
第五章薄壁空间结构 第五章薄壁空间结构 第一节概述 一(薄壁空间结构发展简况二(曲面理论相关知识1(基本概念: (1)薄壳:壳体结构一般是由上、下两个几何曲面构成的空间薄壁结构。当S 不随坐标位置的不同而改变时,称为等厚壳; 反之,称为变厚度壳。两个曲面之间的距离称为壳体的厚度(S ),当S与壳体的其它尺寸(如曲率半径R,跨度L等)小的多时,一般要求S /R?1/20,(鸡蛋壳的S /R?1/50)称为薄壳结构。现代建筑中所采用的壳体一般为薄壳结构。 (2)中曲面:等分壳体各点厚度的几何曲面称为壳体的中曲面。薄壳结构,可以仅以中曲面的方程描述整个结构的变形及内力。 (3)高斯曲率:曲面上任意一点上的高斯曲率等于该点两主曲率的乘积: K=kk=1/RR1212 A(正高斯曲率:K=kk>0 12 B(负高斯曲率:K=kk<0 12 C(零高斯曲率:K=kk=0,即其中一个主方向为直线。12 ⑷矢高、矢率:中曲面覆盖的底面的短边为A,如图示:f/a称为矢率。矢率很小的壳体称为扁壳,矢率较大着称为陡壳。在混凝土结构中,f/a?1/5 时,称为扁壳。 三(薄壳结构的内力 1(薄壳的内力:如图:对于任意壳体结构,在荷载作用下,壳体的内力可以分为两类——作用于中曲面内的和作用于中曲面外的弯曲内力。弯曲内力是由于中曲面 的曲率和扭率改变而产生的,它包括弯矩、横剪力、扭矩; 理想的薄膜没有抵抗弯曲和扭曲的能力,在荷载的作用下只产生正向应力N和顺剪力;因此,设计中应选
取合理的曲面形式,使壳体内的弯曲内力小到足可以忽略的程度。2(可以忽略弯曲内力的条件:A。薄壁S /R?1/20,并同时满足 B(壳体具有均匀、连续变化的曲面; C(壳体上的荷载是均匀连续的; D(壳体的各边界能够沿着曲面的法线方向自由移动,支座只产生阻止曲面沿切线方向位移的反力。 由于壳体主要承受薄膜内力,弯曲内力很小,且薄膜内力沿壳壁是均匀分布的,所以,壳体结构可以充分发挥材料强度,做到壳体薄,自重轻而强度大。因而经济。 第二节薄壳结构的曲面形式 一(旋转曲面: 由一平面曲线作为母线绕其平面内的轴旋转而成的曲面。不同形状的母线,形成的旋转曲面也不同。 二(平移曲面: 一条竖向曲线做母线沿另一条竖向曲线(导线)平行移动所形成的曲面。1(椭圆抛物面: 母线: 抛物线;导线: 与母线凸向相同的抛物线平移形成,其形成的曲面与水平面的截交面为一椭圆。 2(双曲抛物面: 母线: 抛物线;导线: 与母线凸向相反的抛物线平移形成。其形成的曲面 与水平面的截交面为一双曲线。 三(直纹曲面: 由一根直线(母线)的两端分别沿两固定的曲线(导线)移动而形成 的曲面。工程中常见的直纹曲面 1(扭壳、鞍壳: 扭壳是由扭曲面构成的。扭曲面则是一根直母线沿两根互相倾斜但不相交的直导线平移而成的曲面; 鞍壳即双曲抛物面构成的。 2(柱面、柱状面:
大跨空间结构案例分析
通过这一个学期建筑结构选型将建筑结构分类如下:●平面结构 梁柱结构(框架结构 桁架结构 单层钢架结构 拱式结构 ●空间结构 薄壁空间结构 网架结构 网壳结构网格结构 悬索结构 薄膜结构 ●高层建筑结构 ●平面结构 平面屋盖结构空间跨度相比较小,节点、支座形式较简单。 2008年奥运会摔跤比赛馆总建筑面积约23950平方米,比赛馆平面是一个82.4*94米平面,屋面是反对称的折面,采用巨型门式钢钢架结构,将建筑塑造为富有韵律感的
造型,如图所示。三维整体模型工程屋盖由12榀空间门式钢钢架组成,跨度82.4米,中心距8,0米,钢刚架为四肢组合的格构式结构。构件间的连接节点均为相贯节点,钢架柱(钢管连接于看台部分的钢筋混凝土柱,屋盖结构外形简洁、流畅,节点形式简单,刚度大,几何特性好。 单榀空间门式钢刚架单榀空间门式钢刚架(有连系杆单榀空间门式钢刚架(有连系杆
刚架柱支座 ●空间结构 ●网格结构 ?网架结构 一:2008奥运会国家体育馆 国家体育馆位于北京奥林匹克公园中心区,建筑面积80 476m2 ,固定座席118 万座,活动座2 000座,用于举办2008 年奥运会的体操、手球比赛,赛后用于举办体育比赛和文艺演出。虽然体育馆在功能上划分为比赛馆和热身馆两部分,但屋盖结构在两个区域连成整体,即采用正交正放的空间网架结构连续跨越比赛馆和热身馆两个区域,形成一个连续跨结构。空间网架结构在南北方向的网格尺寸为815m,东西方向的网格有两种尺寸,其中中间(轴a和○K之间的网格尺寸为1210m,其他轴的网格尺寸为815m。按照建筑造型要求,网架结构厚度在11518~31973m之间。不包括悬挑结构在内,比赛馆的平面尺寸为114m ×144m,跨度较大,为减小结构用钢量,增加结构刚度,充分发挥结构的空间受力性能,在空间网架结构的下部还布置了双向正交正放的钢索,钢索通过钢桅杆与其上部的网架结构相连,形成双向张弦空间网格结构。其中最长桅杆的长度为91237m,钢索形状根据桅杆高度通过圆弧拟合确定。在
平面问题的有限元法-Read
3 弹性力学平面问题的有限元法 本章包括以下的内容: 3.1弹性力学平面问题的基本方程 3.2单元位移函数 3.3单元载荷移置 3.4单元刚度矩阵 3.5单元刚度矩阵的性质与物理意义 3.6整体分析 3.7约束条件的处理 3.8整体刚度矩阵的特点与存储方法 3.9方程组解法 3.1弹性力学平面问题的基本方程 弹性力学是研究弹性体在约束和外载荷作用下应力和变形分布规律的一门学科。在弹性力学中针对微小的单元体建立基本方程,把复杂形状弹性体的受力和变形分析问题归结为偏微分方程组的边值问题。弹性力学的基本方程包括平衡方程、几何方程、物理方程。 弹性力学的基本假定如下: 1)完全弹性,2)连续,3)均匀,4)各向同性,5)小变形。 3.1.1基本变量 弹性力学中的基本变量为体力、面力、应力、位移、应变,各自的定义如下。 体力 体力是分布在物体体积内的力,例如重力和惯性力。 面力 面力是分布在物体表面上的力,例如接触压力、流体压力。 应力 物体受到约束和外力作用,其内部将产生内力。物体内某一点的内力就是应力。 图3.1
如图3.1假想用通过物体内任意一点p 的一个截面mn 将物理分为Ⅰ、Ⅱ两部分。将部分Ⅱ撇开,根据力的平衡原则,部分Ⅱ将在截面mn 上作用一定的内力。在mn 截面上取包含p 点的微小面积A ?,作用于A ?面积上的内力为Q ?。 令A ?无限减小而趋于p 点时,Q ?的极限S 就是物体在p 点的应力。 S A Q A =??→?0lim 应力S 在其作用截面上的法向分量称为正应力,用σ表示;在作用截面上的切向分量称为剪应力,用τ表示。 显然,点p 在不同截面上的应力是不同的。为分析点p 的应力状态,即通过p 点的各个截面上的应力的大小和方向,在p 点取出的一个平行六面体,六面体的各楞边平行于坐标轴。 图3.2 将每个上的应力分解为一个正应力和两个剪应力,分别与三个坐标轴平行。用六面体表面的应力分量来表示p 点的应力状态。应力分量的下标约定如下: 第一个下标表示应力的作用面,第二个下标表示应力的作用方向。 xy τ,第一个下标x 表示剪应力作用在垂直于X 轴的面上,第二个下标y 表示剪应力指 向Y 轴方向。 正应力由于作用表面与作用方向垂直,用一个下标。x σ表示正应力作用于垂直于X 轴的面上,指向X 轴方向。 应力分量的方向定义如下: 如果某截面上的外法线是沿坐标轴的正方向,这个截面上的应力分量以沿坐标轴正方向为正; 如果某截面上的外法线是沿坐标轴的负方向,这个截面上的应力分量以沿坐标轴负方向为正。 剪应力互等:xz zx zy yz yx xy ττττττ===,, 物体内任意一点的应力状态可以用六个独立的应力分量x σ、y σ、z σ、xy τ、yz τ、zx τ
03-02 空间问题的四面体单元
第三章 轴对称、三维和高次单元 §3-2 空间问题的四面体单元 空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完全相同。由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题和平面问题大得多。它要求计算机的内存大,且计算时间长,费用高。这些问题都给三维有限单元法的具体运用带来许多困难。 和平面问题一样,空间有限单元法采用单元也是多种多样的,其中最简单的是四节点四面体单元。采用四面体单元和线性位移模式来处理空 间问题,可以看作平面问题中三角形单元的推广。 在采用四面体单元离散化后的空间结构物中,一系列不相互重叠的四面体之间仅在节点处以空间铰相互连接。四节点四面体单元仅在四个顶点处取为节点,其编号为i,j,m,p 。每个单元的计算简图如图3-7所示。 在位移法中,取节点位移为基本未知量,四节点四面体单元共有十二个自由度(位移分量),其节点位移列阵为 {}[ ] T p p p m m m j j j i i i p m j i e w v u w v u w v u w v u =??????????????=δδδδδ 其子矩阵 {}[]i i i i w v u =δ (i,j,m) 相应的节点力列阵为 {}[ ] T p m j i e F F F F F - 图3-7 空间四面体单元
其子矩阵 {}[]T i i i i W V U F = 一、单元法位移函数 结构中各点的位移是坐标x 、y 、z 的函数。当单元足够小时,单元内各点的位移可用简单的线性多项式来近似描述,即 ?? ? ??+++=+++=+++=z y x w z y x v z y x u 121110087654321αααααααααααα (3-49) 式中1α,2α,…,12α是十二个待定系数,它们可由单元的节点位移和坐标确定。假定节点i,j,m,p 的坐标分别为(i x i y i z )、(j x j y j z )、(m x m y m z )、 (p x p y p z ),将它们代入(3-49)式的第一式可得各个节点在x 方向的位移 ?? ? ? ? ?? ??? ?? ? ?+++=+++=+++=+++=p p p p m m m m j j j j i i i i z y x u z y x u z y x u z y x u 4321432143214321αααααααααααααααα (3-50) 解上述线性方程组,可得到1α,2α,3α,4α,再代入(3-50)式,得 ] )()()()[(61p p p p p m m m m m j j j j j i i i i i u z d y c x b a u z d y c x b a u z d y c x b a u z d y c x b a V u +++-+++++++-+++= (3-51) 其中V 为四面体ijmp 的体积,a i ,b i ,…,c p ,d p 为系数。 p p p m m m j j j i i i z y x z y x z y x z y x V 1 111= (3-52)
第四章:空间问题的有限元
第四章 空间问题的有限元 在工程问题中,有些结构形状非常复杂,必须按照空间问题来求解。由于4节点四面体单元可以很好的模拟几何体的边界形状而被广泛使用。因此本章将介绍此种单元及8节点六面体单元。 §4.1 空间问题的离散化 在工程实际中,有些结构由于形体复杂,并且三个方向的尺寸同量级,必须按空间问题求解。空间问题有限元法的原理、思路和解题方法完全类同于平面问题的有限元法,所不同的是它具有三维特点。它所采用的离散化模型仍然是由若干单元在节点处连接而成的,而且节点仍为铰接,但是这些单元具有块体形状。它的基本未知量是节点位移,有3个分量:,,u v w 。它的分析方法仍然是先进行单元分析,再进行整体分析,最后求解整体平衡方程。但必须指出,由平面问题转换为空间问题给有限元分析带来了两个主要困难: 1、空间结构离散不像平面问题直观,当人工离散时很容易产生错误。 2、未知量的数量剧增,对于比较复杂的空间问题,计算机存储容量和计算机费用都会产生问题。 为解决上述两个问题,前者可通过寻找规律,建立网格自动生成前处理程序来克服,而后者则可采用高阶元以提高单元精度,达到减少未知量和节省机时的目的。 §4.2常应变四面体单元 §4.2.1位移函数 图4-1所示为四面体单元,以四个角点i ,j ,m ,l 为结点,每个结点有三个自 由度,因此由广义坐标给出的线性位移函数为 000000u ??β?β??? ??==?? ???? (4.2.1) 其中[]1x y z ?= 图4-1 四面体单元 []1212T ββββ= 把四个节点坐标代入(4.2.1)式时,可得
{}000000A q A A A ββ????==?? ???? (4.2.2) 其中{}T i i i j j j m m m l l l q u v w u v w u v w u v w ??=?? 1111i i i j j j m m m l l l x y z x y z A x y z x y z ?? ????=??? ??? 由(4.2.2)式求出 {}1A q β-= (4.2.3) 将(4.2.3)式代入(4.2.1)式后,则有 {}{}1i j m l u B A q N N N N q -??=Φ=Φ=I I I I ?? (4.2.4) 其中100010001????I =?? ???? ()1 6i i i i i N a b x c y d z V = +++ ()1 6j j j j j N a b x c y d z V =- +++ ()1 6m m m m m N a b x c y d z V = +++ ()1 6l l l l l N a b x c y d z V =- +++ 称为形函数,它们的系数为 i j j i m m m l l l x y z a x y z x y z = 1 11j j i m m l l y z b y z y z = 111 j j i m m l l x z c x z x z = 111j j i m m l l x y d x y x y =
薄壁空间结构
薄壁空间结构 在本小节中我们要给大家介绍各种薄壁空间结构体系的组成、优缺点及适用范围;各种薄壁空间结构体系的合理布置原则及及受力特点。 一、薄壳结构的概念 壳体结构一般是由上下两个几何曲面构成的空间薄壁结构。这两个曲面之间的距离称为壳体的厚度t。当厚度t远小于壳体的最小曲率半径时,称为薄壳。一般在建筑工程中所遇到的壳体,常属于薄壳结构的范畴。 在面结构中,平板结构主要受弯曲内力,包括双向弯矩和扭矩,如图1-65a。薄壁空间结构如图1-95b所示的壳体,它的厚度t远小于壳体的其它尺寸(如跨度),属于空间受力状态,主要承受曲面内的轴力(双向法向力)和顺剪力作用,弯矩和扭矩都很小。 图1-65 面结构 (a)平板结构(b)曲面结构(壳) 薄壁空间结构,由于它主要承受曲面内的轴力作用,所以材料强度得到充分利用;同时由于它的空间工作,所以具有很高的强度及很大的刚度。薄壳空间结构内力比较均匀,是一种强度高、刚度大、材料省、既经济又合理的结构型式。 薄壁空间结构常用于中、大跨度结构,如展览大厅,飞机库、工业厂房、仓库等。在一般的民用建筑中也常采用薄壳结构。 薄壁空间结构在应用中也存在一些问题,由于它体形复杂,一般采用现浇结构,所以费模板、费工时,往往因此而影响它的推广。同时在设计方面,薄壁空间结构的计算过于复杂。 二、薄壳空间结构的曲面形式 薄壳结构中曲面的形式,按其形成的几何特点可以分成以下三类: 1.旋转曲面
由一平面曲线(或直线)作母线绕其平面内的一根轴线旋转而成的曲面,称为旋转曲面。 在薄壁空间结构中,常用的旋转曲面有球形曲面、旋转抛物(椭圆)面、圆锥曲面、旋转双曲面等,分别见图1-66。 图1-66 旋转曲面 2.直纹曲面(图1-67) 一根直母线,其两端各沿两固定曲导线(或为一固定曲导线,一固定直导线)平行移动而成的曲面,称为直纹曲面。一般有: (1)柱曲面(一根直母线沿两根曲率方向和大小相同的竖向曲导线移动而成)或柱状曲面(一根直母线沿两根曲率方向相同但大小不同的竖向曲导线始终平行于导平面移动而成)它们又都称单曲柱面,分别见图1-67。 (2)锥面(一根直母线一端沿一竖向曲导线,另端通过一定点移动而成)或锥状面(同上,但另端为一直线,母线移动时始终平行于导平面), 后者又称劈锥曲面,分别见图1-67。 (3)扭面(一根直母线在两根相互倾斜又不相交的直导线上平行移动而成), 见图1-67。 直纹曲面建造时模板易于制作,常被采用。
薄壳结构
建筑结构选型 ——薄壳结构 学校: 专业班级: 指导老师: 小组成员:
摘要 大跨建筑中的壳体结构通常为薄壳结构,即壳体厚度于其中的最小曲率半径之比小于1/20,为薄壁空间结构的一种,它包括球壳、筒壳、双曲扁壳和扭壳等多种形式。他们的共同特点在于通过发挥结构的空间作用,把垂直于壳体表面的外力分解为壳体面内的薄膜力,再传递给支座,弥补了板、壳等薄壁构件的面外薄弱性质,以比较轻的结构自重和较大的结构刚度及较高的承载能力实现结构的大跨度。 关键词 形态分类受力特点应用与发展案例研究 正文 1 薄壳结构的定义 壳,是一种曲面构件,主要承受各种作用产生的中面内的力。薄壳结构就是曲面的薄壁结构,按曲面生成的形式分为筒壳、圆顶薄壳、双曲扁壳和双曲抛物面壳等,材料大都采用钢筋和混凝土。壳体能充分利用材料强度,同时又能将承重与围护两种功能融合为一。 1.1薄壳结构的特点 壳体结构一般是由上下两个几何曲面构成的空间薄壁结构。两个曲面之问的距离即为壳体的厚度(δ),当δ比壳体其他尺寸(如曲率半径R,跨度等)小得多时,一般要求δ/R≤1/20(鸡蛋壳的δ/R≈1/50)称为薄壳结构。现代建筑工程中所采用的壳体一般为薄壳结构。而薄壳结构为双向受力的空间结构,在竖向均布荷载作用下,壳体主要承受曲面内的轴向力(双向法向力)和顺剪力作用,曲面轴力和顺剪力都作用在曲面内,又称为薄膜内力。而只有在非对称荷载(风,雪等)作用下,壳体才承受较小的弯矩和扭矩。 由于壳体内主要承受以压力为主的薄膜内力,且薄膜内力沿壳体厚度方向均匀分布,所以材料强度能得到充分利用;而且壳体为凸面,处于空间受力状态,各向刚度都较大,因而用薄壳结构能实现以最少之材料构成最坚之结构的理想。 由于壳体强度高、刚度大、用料省、自重轻,覆盖大面积,无需中柱,而且其造型多变,曲线优美,表现力强,因而深受建筑师们的青睐,故多用于大跨度的建筑物,如展览厅、食堂、剧院、天文馆、厂房、飞机库等。 不过,薄壳结构也有其自身的不足之处,由于体形多为曲线,复杂多变,采用现浇结构时,模板制作难度大,会费模费工,施工难度较大;一般壳体既作承重结构又作屋面,由于壳壁太薄,隔热保温效果不好;并且某些壳体(如球壳、扁壳)易产生回声现象,对音响效果要求高的大会堂、体育馆、影剧院等建筑不适宜。 2 薄壳结构型式与曲面的关系 2.1旋转曲面 由一平面曲线作母线绕其平面内的轴旋转而成的曲面,称为旋转曲面。该平面曲线可有不同形状,因而可得到用于薄壳结构中的多种旋转曲面,如球形曲面、旋转抛物面和旋转双曲面等(如下图)。圆顶结构就是旋转曲面的一种。
有限元 2-弹性力学平面问题有限单元法(2.1三角形单元,2.2几个问题的讨论)
第2章 弹性力学平面问题有限单元法 2.1 三角形单元(triangular Element) 三角形单元是有限元分析中的常见单元形式之一,它的优点是: ①对边界形状的适应性较好,②单刚形式及其推导比较简单,故首先介绍之。 一、结点位移和结点力列阵 设右图为从某一结构中取出的一典型三角形单元。 在平面应力问题中,单元的每个结点上有沿x 、y 两个方向的力和位移,单元的结点位移列阵规定为: 相应结点力列阵为: (式2-1-1) 二、单元位移函数和形状函数 前已述及,有限单元法是一种近似方法,在单元分析中,首先要求假定(构 造)一组在单元内有定义的位移函数作为近似计算的基础。即以结点位移为已知量,假定一个能表示单元内部(包括边界)任意点位移变化规律的函数。 构造位移函数的方法是:以结点(i,j,m)为定点。以位移(u i ,v i ,…u m v m )为定点上的函数值,利用普通的函数插值法构造出一个单元位移函数。 在平面应力问题中,有u,v 两个方向的位移,若假定单元位移函数是线性的,则可表示成: (,)123 u u x y x y ααα==++ 546(,)v v x y x y ααα==++ (2-1-2)a 式中的6个待定常数α1 ,…, α6 可由已知的6个结点位移分量(3个结点的坐标) {}??? ?? ?????=????? ???? ?????????????=m j i m e d d d d m j j i v u v u v u i {} i i j j m X Y X (2-1-1)Y X Y i e j m m F F F F ?? ?? ???? ???? ??==??????????????????
第三章空间问题的有限元方法
第三章 空间问题的有限元方法 引言 许多工程实际问题,属于空间问题,由于结构形状或受力的复杂性,用经典弹性理论去求解它们的解析解是不可能的。而有限元法处理此类问题,原则上不存在什么困难,本章将介绍一般空间问题的四面体单元。 一般空间问题的有限元列式 3.2.1 单元位移模式及插值函数 空间问题中,每个单元有四个结点,编码为i,j,m,p 。每个结点有3个位移分量。每个结点的位移可用位移矢量i α表示,即 ?? ?? ? ?????=i i i i w v u α ),,,(p m j i 单元结点的位移向量可表示为 [ ] T p p p m m m j j j i i i p m j i e w v u w v u w v u w v u =?????? ????????=ααααα ? e α为单元结点位移列阵。 假设单元内的位移模式选取一次多项式 z y x u 4321ββββ+++= z y x v 8765ββββ+++= (3.2.1) z y x w 1211109ββββ+++= 由于四个结点也在单元内,满足位移模式,于是得 i i i i z y x u 4321ββββ+++= j j j j z y x u 4321ββββ+++= (3.2.2) m m m m z y x u 4321ββββ+++= … p p p p z y x u 4321ββββ+++=
上式是关于4321,,,ββββ的线性方程组。4321,,,ββββ是待定常数,也称为广义坐标。它可由(3.2.2)式求出。上式的系数行列式是 V z y x z y x z y x z y x D p p p m m m j j j i i i 21111== (3.2.3) 上式中当i,j,m,p 的编号顺序满足右手法则,V 值为正,其大小为四面体体积,因此为了方便单元的编号一般满足右手法则。求得4321,,,ββββ后,回代入位移模式得 p p m m j j i i u N u N u N u N u +++= (3.2.4) 式中 )(61 z d y c x b a V N i i i i i +++= ),,,(p m j i (3.2.5) p p p m m m j j j i z y x z y x z y x a = - p p m m j j i z y z y z y b 111-= p p m m j j i z x z x z x c 111= ),,,(p m j i (3.2.6) p p m m j j i y x y x y x d 111-= 上式下标),,,(p m j i 轮换,可得j j j j d c b a ,,,,m m m m d c b a ,,,及p p p p d c b a ,,,。 同理,也可得到其它两式,于是得
第五章杆系结构的有限元法.
第五章 杆系结构的有限元法 5.1 引言 杆系结构是工程中应用较为广泛的结构体系,包括平面或空间形式的梁、桁架、刚架、拱等。其组成形式虽然复杂多样,但用计算机进行分析时却较为简单。杆系结构中的每个杆件都是一个明显的单元。杆件的两个端点自然形成有限元法的节点,杆件与杆件之间则用节点相连接。显然,只要建立起杆件两端位移与杆端力之间的关系,则整体平衡方程的建立与前几章完全相同。 杆端位移与杆端力之间的关系,可用多种方法建立,包括前面几章一直采用的虚功原理,但是采用材料力学、结构力学的某些结论,不仅物理概念清晰、直观,而且推导过程简单明了。因此,本章将采用这种方法进行单元分析。至于整体平衡方程的建立,则和前面几章所讲的方法一样,即借助于单位定位向量,利用单元集成法进行。 5.2 平面桁架的有限元分析 平面桁架在计算上有以下几个特点: 1. 杆件的每个节点仅有两个线位移; 2. 杆件之间的连接为理想铰,即在节点处各杆件可相对自由转动,且杆件轴线交于一点。 3. 外载荷均为作用于节点的集中力。 由于以上特点,所以在理论上各杆件只产生轴向拉、压力,截面应力分布均匀,材料可得到充分利用,因此桁架结构往往用于大跨结构。 5.2.1 局部坐标系下的单元刚度矩阵 从平面桁架中任取一根杆件作为单元,称作桁架单元,单元长为L ,横截面面积为A ,图5.1。两端节点分别用i 和j 表示,规定从i 到j 的连线方向为局部坐标x 轴,垂直于x 的方向为y 轴。 图5.1 由于桁架中各杆只产生轴向力和轴向变形,所以节点i 和j 只发生沿x 方向的位移,用i u 和j u 表示,相应的杆端轴力分别用xi F 和xj F 表示。由虎克定律可推得 ) ()()(j i i j xj j i xi u u L EA u u L EA F u u L EA F --=-=-= 将这两个式子写成矩阵形式,就是 e j i e xj xi u u L EA L EA L EA L EA F F ????????????????????--=?????????? (5.1) 显然,在局部坐标系下,i 、j 两节点沿y 轴方向的位移0==j i v v ,在y 轴方向的节点力