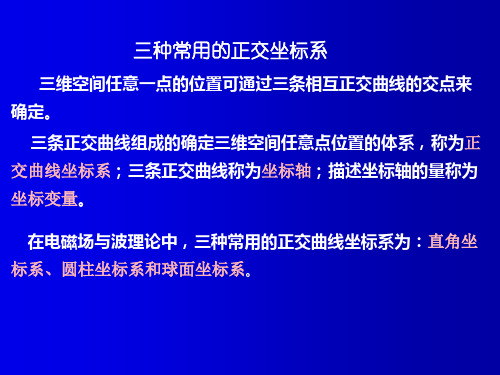
三种常用的坐标系
空间直角坐标系、大地坐标系、平面坐标系、高斯平面直角坐标系

空间直角坐标系、大地坐标系、平面坐标系、高斯平面直角坐标系本篇学习了空间直角坐标系、大地坐标系、平面坐标系、高斯平面直角坐标系。
这个个坐标系有时很容易弄混淆!(一)空间直角坐标系空间直角坐标系的坐标原点位于参考椭球的中心,Z轴指向参考椭球的北极,X轴指向起始子午面与赤道的交点,Y轴位于赤道面上切按右手系于X轴呈90度夹角,某点中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
空间直角坐标系可用如下图所示:(二)大地坐标系大地坐标系是采用大地纬度、经度和大地高程来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高程是空间的点沿着参考椭球的法线方向到参考椭球面的距离。
地面点的高程和国家高程基准(1)绝对高程。
地面点沿垂线方向至大地水准面的距离称为绝对高程或称海拔。
过去我国采用青岛验潮站(tide gauge station)1950~1956年观测成果求得的黄海平均海水面作为高程的零点,称为“1956年黄海高程系”(Huanghai height system 1956水准原点高程为72.289m)。
后经复查,发现该高程系的验潮资料时间过短,准确性较差,改用青岛验潮站1950~1979年的观测资料重新推算,并命名为“1985年国家高程基准”(Chinese height datum 1985)。
国家水准原点(leveling origin高程为72.260m)设于青岛市观象山附近,作为我国高程测量的依据。
它的高程值是以“1985年国家高程基准”所确定的平均海水面为零点测算而得。
在使用原“1956年黄海高程系”的高程成果时,应注意将其换算为新的高程基准系统。
(2)相对高程。
地面点沿铅垂线方向至任意假定的水准面的距离称为该点的相对高程,亦称假定高程。
在图l—5中,地面点A和B的相对高程分别为H'A 和H'B 。
测量坐标系有哪三种
测量坐标系有哪三种背景简介在测量领域,坐标系是一种非常重要的概念,用于描述和测量物体位置和方向。
使用坐标系可以方便地捕捉和记录物体的几何形态和位置信息。
在实际应用中,有不同的方式来定义和表示坐标系,本文将介绍三种常见的测量坐标系。
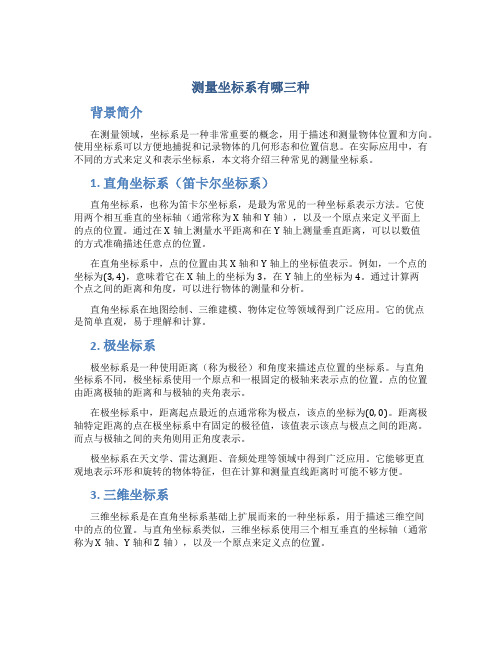
1. 直角坐标系(笛卡尔坐标系)直角坐标系,也称为笛卡尔坐标系,是最为常见的一种坐标系表示方法。
它使用两个相互垂直的坐标轴(通常称为X轴和Y轴),以及一个原点来定义平面上的点的位置。
通过在X轴上测量水平距离和在Y轴上测量垂直距离,可以以数值的方式准确描述任意点的位置。
在直角坐标系中,点的位置由其X轴和Y轴上的坐标值表示。
例如,一个点的坐标为(3, 4),意味着它在X轴上的坐标为3,在Y轴上的坐标为4。
通过计算两个点之间的距离和角度,可以进行物体的测量和分析。
直角坐标系在地图绘制、三维建模、物体定位等领域得到广泛应用。
它的优点是简单直观,易于理解和计算。
2. 极坐标系极坐标系是一种使用距离(称为极径)和角度来描述点位置的坐标系。
与直角坐标系不同,极坐标系使用一个原点和一根固定的极轴来表示点的位置。
点的位置由距离极轴的距离和与极轴的夹角表示。
在极坐标系中,距离起点最近的点通常称为极点,该点的坐标为(0, 0)。
距离极轴特定距离的点在极坐标系中有固定的极径值,该值表示该点与极点之间的距离。
而点与极轴之间的夹角则用正角度表示。
极坐标系在天文学、雷达测距、音频处理等领域中得到广泛应用。
它能够更直观地表示环形和旋转的物体特征,但在计算和测量直线距离时可能不够方便。
3. 三维坐标系三维坐标系是在直角坐标系基础上扩展而来的一种坐标系,用于描述三维空间中的点的位置。
与直角坐标系类似,三维坐标系使用三个相互垂直的坐标轴(通常称为X轴、Y轴和Z轴),以及一个原点来定义点的位置。
在三维坐标系中,点的位置由其X轴、Y轴和Z轴上的坐标值表示。
例如,一个点的坐标为(3, 4, 2),意味着它在X轴上的坐标为3,在Y轴上的坐标为4,在Z 轴上的坐标为2。
测量常用的坐标系有哪几种

测量常用的坐标系有哪几种在测量学中,坐标系是用来确定物体或点在空间中位置的重要工具。
根据应用的不同,测量中常用的坐标系可以分为直角坐标系、极坐标系和球坐标系三种。
1. 直角坐标系直角坐标系,也被称为笛卡尔坐标系,是最常见和基本的坐标系。
它利用三个垂直于彼此的坐标轴来定位物体的位置。
通常,这三个坐标轴被标记为x、y和z 轴。
在直角坐标系中,任何一个点可以通过一个有序的三个数字来表示,例如(x, y, z)。
这个三元组表示物体相对于图像的原点在各个轴方向上的位移。
直角坐标系广泛应用于计算机图形学、工程测绘和物理学领域。
2. 极坐标系极坐标系也称为极径坐标系,主要用于描述平面上的点。
极坐标系与直角坐标系不同,它采用两个参数来表示点的位置。
一个参数是极径,表示点到坐标原点的距离;另一个参数是极角,表示点相对于参考方向的角度。
通常,极坐标系中,角度以角度值或弧度值来表示,而极径则表示为非负实数。
极坐标系主要应用于极坐标追踪、极位移测量和天体测量等领域。
3. 球坐标系球坐标系是在三维空间中描述点的位置的一种坐标系。
球坐标系使用三个参数来确定点的位置:距离、极角和方位角。
距离表示点到坐标原点的距离;极角表示点相对于参考方向的角度;方位角表示点相对于参考平面的角度。
球坐标系通常用于天文学、导航系统以及物体在球面上运动的描述。
常见的球坐标系表示方法为(r, θ, φ),其中r表示距离,θ表示极角,φ表示方位角。
结论直角坐标系、极坐标系和球坐标系是测量学中常用的坐标系。
直角坐标系适用于描述三维空间中的点的位置;极坐标系适用于平面上的点的位置描述;球坐标系则适用于描述三维空间中的点相对于球面的位置。
不同的坐标系在不同领域具有广泛的应用,在解决测量问题中发挥着重要作用。
了解这些坐标系的特点和适用范围,有助于我们更好地理解并运用测量学中的相关知识和技术。
参考文献:1.Berman, H. (2014). Spherical coordinates. In Principles of ComputerGraphics (pp. 1-4). Springer, New York, NY.。
三个坐标系
o
x
d y dS x ex dydz
dx
y
体积元
dV dxdydz
直角坐标系的长度元、面积元、体积元
2、圆柱面坐标系
坐标变量
, , z
坐标单位矢量 e , e , ez r e ez z 位置矢量 线元矢量 dl e d e d ez dz
散度的表达式:
Fx Fy Fz 直角坐标系 F x y z ( F ) F Fz 柱面坐标系 F z
C C 0 (C为常矢量) (Cf ) C f 散度的有关公式: (kF ) k F (k为常量) f ( f F ) f F F ( F G ) F G
u 1 u u e ez 圆柱面坐标系 u e z
球面坐标系
u 1 u 1 u u er e e r r r sin
C 0 (Cu ) Cu 梯度运算的基本公式: (u v) u v (uv ) uv vu f (u ) f (u )u
面元矢量
dS e dl dl z e ddz dS e dl dl z e ddz dS z ez dl dl ez dd
体积元
dV dddz
3、球面坐标系 坐标变量
坐标单位矢量 er , e , e
标量场的梯度 的旋度恒为零
C 0 (Cf ) f C ( fF ) f F f F ( F G ) F G ( F G ) G F F G F ) 0 ( (u ) 0
空间直角坐标系、大地坐标系、平面坐标系、高斯平面直角坐标系

本篇学习了空间直角坐标系、大地坐标系、平面坐标系、高斯平面直角坐标系。
这个个坐标系有时很容易弄混淆!(一)空间直角坐标系空间直角坐标系的坐标原点位于参考椭球的中心,Z轴指向参考椭球的北极,X轴指向起始子午面与赤道的交点,Y轴位于赤道面上切按右手系于X轴呈90度夹角,某点中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
空间直角坐标系可用如下图所示:(二)大地坐标系大地坐标系是采用大地纬度、经度和大地高程来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高程是空间的点沿着参考椭球的法线方向到参考椭球面的距离。
地面点的高程和国家高程基准(1)绝对高程。
地面点沿垂线方向至大地水准面的距离称为绝对高程或称海拔。
过去我国采用青岛验潮站(tide gauge station)1950~1956年观测成果求得的黄海平均海水面作为高程的零点,称为“1956年黄海高程系”(Huanghai height system 1956水准原点高程为72.289m)。
后经复查,发现该高程系的验潮资料时间过短,准确性较差,改用青岛验潮站1950~1979年的观测资料重新推算,并命名为“1985年国家高程基准”(Chinese height datum 1985)。
国家水准原点(leveling origin高程为72.260m)设于青岛市观象山附近,作为我国高程测量的依据。
它的高程值是以“1985年国家高程基准”所确定的平均海水面为零点测算而得。
在使用原“1956年黄海高程系”的高程成果时,应注意将其换算为新的高程基准系统。
(2)相对高程。
地面点沿铅垂线方向至任意假定的水准面的距离称为该点的相对高程,亦称假定高程。
在图l—5中,地面点A和B的相对高程分别为H'A 和H'B。
(3)高差。
地面上任意两点的高程(绝对高程或相对高程)之差称为高差。
测量坐标系统分为哪三种方法

测量坐标系统分为哪三种方法在测量学中,坐标系统是一种重要的测量工具,用于描述和定位物体在空间中的位置。
随着测量技术的发展,出现了多种测量坐标系统的方法。
本文将介绍测量坐标系统的三种常见方法,分别是直角坐标系、极坐标系和球坐标系。
一、直角坐标系直角坐标系是最常用的坐标系统之一,它是通过将空间划分为三个相互垂直的坐标轴来描述物体的位置。
这三个坐标轴分别是X轴、Y轴和Z轴。
在直角坐标系中,位置可以通过一个三元组(x, y, z)来表示,其中x表示物体在X轴上的位置,y表示物体在Y轴上的位置,z表示物体在Z轴上的位置。
通过三个坐标轴的正负方向的组合,可以描述物体在空间中的位置和方向。
直角坐标系的优点是简单易懂,适用于大多数测量任务。
二、极坐标系极坐标系是一种通过距离和角度来描述物体位置的坐标系统。
在极坐标系中,物体的位置由两个参数确定,一个是极径,表示物体到原点的距离,另一个是极角,表示物体与某一固定方向的夹角。
极坐标系常用于极坐标系下的测量任务,例如测量扇叶的长度和角度等。
极坐标系的优点是能够简洁地描述圆形或径向对称的物体,但不适用于描述空间中的物体位置。
三、球坐标系球坐标系是一种通过半径、极角和仰角来描述物体位置的坐标系统。
在球坐标系中,物体的位置由三个参数确定。
半径表示物体到原点的距离,极角表示物体与某一固定方向的夹角,仰角表示物体与参考平面的夹角。
球坐标系常用于描述对象在球面上的位置,例如天体测量和地理测量等。
球坐标系能够方便地描述在球面上的位置,但在平面上的测量不常用。
总结本文介绍了测量坐标系统的三种常见方法:直角坐标系、极坐标系和球坐标系。
直角坐标系是最常用的坐标系统,通过三个相互垂直的坐标轴来描述物体的位置。
极坐标系通过距离和角度来描述物体位置,适用于圆形或径向对称的测量任务。
球坐标系通过半径、极角和仰角来描述物体位置,适用于球面上的测量任务。
不同的测量任务需要选择适合的坐标系统来描述物体的位置和方向,以便更准确地进行测量和定位。
理工类专业课复习资料-电磁场与电磁波公式总结

电磁场与电磁波复习第一部分知识点归纳第一章矢量分析1、三种常用的坐标系(1)直角坐标系微分线元:dz a dy a dx a R d z y x →→→→++=面积元:⎪⎩⎪⎨⎧===dxdy dS dxdzdS dydzdS zyx ,体积元:dxdydzd =τ(2)柱坐标系长度元:⎪⎩⎪⎨⎧===dz dl rd dl drdl z r ϕϕ,面积元⎪⎩⎪⎨⎧======rdrdzdl dl dS drdz dl dl dS dz rd dl dl dS z zz r z r ϕϕϕϕ,体积元:dzrdrd d ϕτ=(3)球坐标系长度元:⎪⎩⎪⎨⎧===ϕθθϕθd r dl rd dl drdl r sin ,面积元:⎪⎩⎪⎨⎧======θϕθϕθθθϕϕθθϕrdrd dl dl dS drd r dl dl dS d d r dl dl dS r r r sin sin 2,体积元:ϕθθτd drd r d sin 2=2、三种坐标系的坐标变量之间的关系(1)直角坐标系与柱坐标系的关系⎪⎪⎩⎪⎪⎨⎧==+=⎪⎩⎪⎨⎧===z z x y yx r zz r y r x arctan,sin cos 22ϕϕϕ(2)直角坐标系与球坐标系的关系⎪⎪⎪⎩⎪⎪⎪⎨⎧=++=++=⎪⎩⎪⎨⎧===z yz y x z z y x r r z r y r x arctan arccos ,cos sin sin cos sin 222222ϕθθϕθϕθ(3)柱坐标系与球坐标系的关系⎪⎪⎩⎪⎪⎨⎧=+=+=⎪⎩⎪⎨⎧===ϕϕθθϕϕθ22'22''arccos ,cos sin z r z zr r r z r r 3、梯度(1)直角坐标系中:za y a x a grad z y x∂∂+∂∂+∂∂=∇=→→→μμμμμ(2)柱坐标系中:za r a r a grad z r∂∂+∂∂+∂∂=∇=→→→μϕμμμμϕ1(3)球坐标系中:ϕμθθμμμμϕθ∂∂+∂∂+∂∂=∇=→→→sin 11r a r a r a grad r 4.散度(1)直角坐标系中:zA y A x A A div zy X ∂∂+∂∂+∂∂=→(2)柱坐标系中:z A A r rA r r A div zr ∂∂+∂∂+∂∂=→ϕϕ1)(1(3)球坐标系中:ϕθθθθϕθ∂∂+∂∂+∂∂=→A r A r A r rr A div r sin 1)(sin sin 1)(1225、高斯散度定理:⎰⎰⎰→→→→=⋅∇=⋅ττττd A div d A S d A S,意义为:任意矢量场→A 的散度在场中任意体积内的体积分等于矢量场→A 在限定该体积的闭合面上的通量。
测量常见的三种坐标系统

测量常见的三种坐标系统引言在测量和空间定位领域,坐标系统是一个重要的概念。
不同的坐标系统具有不同的表示方式和适用范围。
本文将介绍三种常见的坐标系统:笛卡尔坐标系统、极坐标系统和球坐标系统,并分析它们在测量和定位中的应用。
1. 笛卡尔坐标系统笛卡尔坐标系统是最常见和常用的坐标系统之一。
它以直角坐标系的形式表示空间中的点。
该系统使用三个数值(x,y,z)来描述一个点的位置,其中x表示点在x轴上的位置,y表示点在y轴上的位置,z表示点在z轴上的位置。
这三个轴相互垂直,并形成一个三维坐标系。
笛卡尔坐标系统可以被广泛应用于测量和定位领域。
例如,在建筑工程中,可以使用笛卡尔坐标系统来测量和定位建筑物的各个部分。
在制图和计算机图形学中,也常使用笛卡尔坐标系统来描述二维或三维物体的位置和形状。
2. 极坐标系统极坐标系统以极坐标的形式来表示空间中的点。
该系统使用两个数值(r,θ)来描述一个点的位置,其中r表示点到原点的距离,θ表示点与正x轴的夹角(以弧度表示)。
极坐标系统在某些特定场景下具有一定优势。
例如,在天文学领域中,极坐标系统常被用来表示天体的位置。
极坐标系统也在雷达测量和声纳定位等领域中得到广泛应用。
3. 球坐标系统球坐标系统是另一种常见的坐标系统。
它将一个点的位置表示为半径(r)、极角(θ)、方位角(φ)这三个值的组合。
球坐标系统在描述三维空间中的物体位置时具有特定的优势。
例如,在天体观测中,球坐标系统能够更好地描述天体的位置和运动。
此外,在地球测量中,球坐标系统也被广泛用于定位和距离测量。
应用比较在实际应用中,选择合适的坐标系统对于测量和定位的精度和效果至关重要。
以下是三种坐标系统的应用比较: - 笛卡尔坐标系统提供了直观和简便的描述空间中点位置的方式,适用于大多数情况下的测量和定位。
它能够准确描述物体在三维空间中的位置,但对于特定场景并不具备特殊优势。
- 极坐标系统在描述点之间的距离和角度关系时更为直观。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
它们相互正交,而且遵 循右手螺旋法则
er e e
第一章 矢量分析
1 – 1 三种常用的坐标系
第一章 矢量分析
在点 M r,,处沿er , e , e
z
方向的长度元分别是: dlr dr dl rd dl r sin d 面积元:
dsr dl dl r2 sin d d
y
sin
z z
o
x
(x, y, z)
M (,, z)
r z (r, ,)
y
y
x2 y2
tg 1
y x
sin 1
z
z
x
y cos1 x2 y2
x x2 y2
1 – 1 三种常用的坐标系
第一章 矢量分析
2 直角坐标系与球坐标系的关系 z
x r sin cos
y
r
sin
sin
解
Ax A ex A e ex A e ex Az ez ex A cos A sin
Ay A ey A e ey A e e y Az ez e y A sin A cos
Az A ez A e ez A e ez Az ez ez Az
r
z r cos
y
o
x
r x2 y2 z2
x
cos1
z
sin1
x2 y2 z2
x2 y2 x2 y2 z2
tg 1
y
sin 1
y
cos1
x
x
x2 y2
x2 y2
(x, y, z)
M (,, z)
z (r, ,)
y
1 – 1 三种常用的坐标系
第一章 矢量分析
3 柱坐标系与球坐标系的关系
1 – 1 三种常用的坐标系
第一章 矢量分析
1 – 1 三种常用的坐标系
第一章 矢量分析
标量场()和矢量场(A)
y
y
x
x
以浓度表示的标量场
以箭头表示的矢量场A
1 – 1 三种常用的坐标系
一 常用坐标系
1 直角坐标系
空间任意点 M x1, y1, z1
其坐标的单位矢量 e x , e y , e z
z
r sin
z r cos
r 2 z2
sin1
cos1
2 z2
o
x
x
z
2 z2
(x, y, z)
M (,, z)
r z (r, ,)
y
y
1 – 1 三种常用的坐标系
第一章 矢量分析
三 三种坐标系的坐标单位矢量之间的关系
(一)直角坐标系与柱坐标系的关系
e cos
e
同理可得,在球坐标系下得位置矢量表达式为
A rer
可见,位置矢量在不同坐标系下得表达式是不同的.
1 – 1 三种常用的坐标系
第一章 矢量分析
例3试判断下列矢量场 E 是否是均匀矢量场:
1.柱坐标系中 E = E1 sin e E1 cos e E2 ez ,其中
E1, E2 都是常数。
2.在球坐标系中 E = er E0 ,其中 E0 是常数。 解1.
sin
ez 0
sin cos
0
0 ex
0
e
y
1 ez
ex cos
e
y
sin
ez 0
sin cos
0
0 e
0
e
Байду номын сангаас
1 ez
1 – 1 三种常用的坐标系
第一章 矢量分析
(二)柱坐标系与球坐标系的关系
er sin 0 cos e
e
cos
0
sin
e
e 0 1 0 ez
2 柱坐标系
柱坐标系中的三个坐标变量是
,,z
过空间任意点 M ,, z 的坐标
单位矢量为e e, e, z ,它们相
互正交,而且遵循右手螺旋法则
e e ez
第一章 矢量分析
1 – 1 三种常用的坐标系
第一章 矢量分析
在点 M ,, z处沿 e , e , ez
方向的长度元分别是:
dl d dl d dlz dz
将上式综合起来,写成简明矩阵形式为
Ax cos
Ay
sin
Az 0
sin cos
0
0 A
0
A
1 Az
1 – 1 三种常用的坐标系
第一章 矢量分析
例2写出空间任一点在直角坐标系下的位置 矢量表达式,然后将此位置矢量转换成在柱坐标 系和球坐标系下的矢量。
解在空间任一点 P(x, y, z) 的位置矢量为
e sin
e
0
ez cos
cos 0
sin
0 er
1
e
0 e
1 – 1 三种常用的坐标系
第一章 矢量分析
(三)直角坐标系与球坐标系的关系
er sin cos
e
cos
cos
e sin
sin sin cos sin
cos
cos ex
sin
e
y
A xex yey zez
利用例1-1中的结论,得
A x cos y sin A x sin y cos
Az z
1 – 1 三种常用的坐标系
第一章 矢量分析
代入 x cos , y sin ,得
A
A 0
Az z
于是,位置矢量在柱坐标系下得表达式为
A e zez
面积元分 ds dldlz ddz
别是: ds dldlz d dz
x
dsz dldl d d
z
ez
x1
e
M
e
z
o
x1 d
y
x1
d
体积元: dV dl dl dlz d ddz
1 – 1 三种常用的坐标系 3 球坐标系
球坐标系中的三个坐标
变量是 r , , 过空间任意点 M r,, 的
r sin
er
x1
o
e
d
e
rd
r sin d
y
ds dlrdl r sin drd x
ds dlrdl rdrd
体积元: dV dlrdl dl r2 sindrdd
1 – 1 三种常用的坐标系
第一章 矢量分析
二 三种坐标系的坐标变量之间的关系
1 直角坐标系与柱坐标系的关系 z
x cos
相互正交,而且遵循右手螺旋
法则
ex ey ez
在直角坐标系内的任一 矢量可表示为
A Ax ex Ay ey Az ez
第一章 矢量分析
1 – 1 三种常用的坐标系
各个面的面积元
dsx dydz dsy dxdz dsz dxdy
体积元
dV dxdydz
第一章 矢量分析
1 – 1 三种常用的坐标系
0 ez
ex sin cos
e
y
sin
sin
ez cos
cos cos cos sin
sin
sin er
cos
e
0 e
1 – 1 三种常用的坐标系
第一章 矢量分析
例1如果有一矢量在柱坐标系下的表达式为 A Ae Ae Az ez ,试求出它在直角坐标系下 的各分量大小。