北京工业大学电子信息工程课程设计结题报告(含有代码)
北京工业大学电子信息工程课程设计结题报告(含有代码)
北京工业大学
专业课程设计
研发课题结题报告
院、系(所)电子信息与控制工程学院专业名称电子信息工程
同组参与者
指导教师徐小平
北京工业大学通信电路实验室
二0一五年九月
L293D根据网上查到的芯片手册有如下的功能
图中的RPR220是反光型光电探测器:
其中LM324芯片是一个电压比较器,由于比较简单,不再附加芯片资料。
原理图中还应注意OUT1、2、3、4除了接到LED灯还接到了单片机的8、9、10、11数字管脚。
此表经指导教师签名批准后复印一式两份,一份交指导教师处备案,一份自留(写结题报告和自我鉴定用)。
北工大-电子课程设计报告-数电-自行车里程表综述

北京工业大学电子课程设计报告学院__________________________专业__________________________班级_____________组号________题目1._______________________2._______________________姓名_________________________学号_________________________指导教师____________________成绩________________________年月日数字部分:自行车里程表一.设计要求(一)设计任务设计、制作一个根据车轮周长、辐条数等参数来记录行驶里程的简易里程表。
要求具有可调整的手段,以适应不同车型。
(二)参考设计方案1、首先使用红外光电传感器对转动的车轮辐条进行测量,产生基本技术脉冲。
若以0.1公里作为里程表的计数单位,则需测量出车轮的周长、一周有多少根辐条、没走0.1 公里要有多少根辐条通过传感器。
若将此计数值转化为里程表的一个计数脉冲,提供给一个多位十进制里程计数器,则记录分辨率就为0.1公里,最后由多位数码管显示出来。
2、框图:(三)设计要求1、显示数字为3位,精度为0.1公里,即(00.0——99.9公里)。
2、数码管要有小数点,即个位与十位间的小数点要亮起来。
3、要标明你所设计的条件(轮周长、辐条数等),给出根据条件不同进行调整的方法。
4、结构简单、所用芯片尽量少、成本低、易于制作。
5、所用芯片与元件尽量在参考元器件范围内选择(实验室没有的需自行解决)(四)发挥部分从使用角度考虑,尝试加上你认为可以完善、改进的功能(如节电功能、显示清零等)。
(五)参考元件CD40106;CD4518(或CD4017,74LS161等);74LS21,74LS08,CD4011(或74LS00);CD4553,CD4543;共阴(共阳)数码管;NPN(PNP)开关管;红外光电传感器等;电阻,电容若干二、设计方案(一)实验初步设计经过对参考设计方案框图的分析得出该实验主要分为4个部分:光控电路设计及脉冲整形、轮辐计数电路、0.1公里计数电路、数码管显示电路(包括译码驱动)。
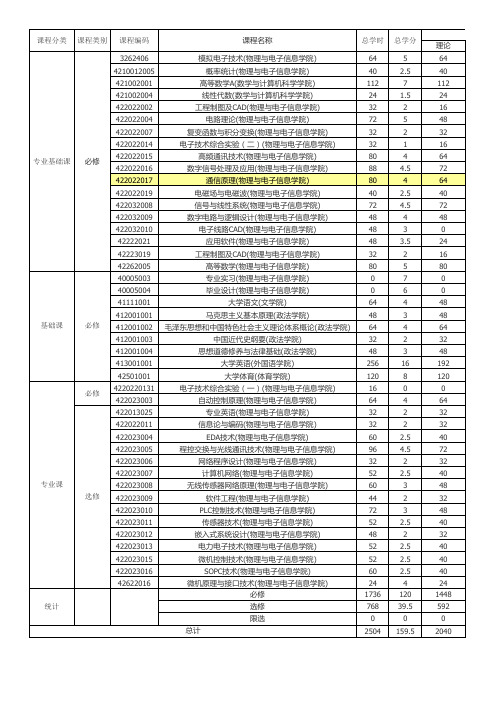
电子信息工程培养目标
实践 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
其他 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
总学时 64 40 112 24 32 72 32 32 80 88 80 40 72 48 48 48 32 80 0 0 64 48 64 32 48 256 120 16 64 32 32 60 96 32 52 60 44 72 52 48 52 52 60 24 1736 768 0 2504
专业基础课
必修
基础课
必修
412001002 412001003 412001004 413001001 42501001 4220220131 422023003 422013025 422022011 422023004 422023005 422023006 422023007
必修
专业课 选修
422023008 422023009 422023010 422023011 422023012 422023013 422023015 422023016 42622016
6 0 0 0 0 0 0 0 32 0 0 80 40 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 72 52 48 52 52 60 0 152 336 0 488
7 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
北京工业大学电子实验报告 压控阶梯波发生器(数字类)
北京工业大学课程设计报告学院电子信息与控制工程专业班级组号题目1、压控阶梯波发生器2、基于运放的信号发生器设计姓名学号指导老师成绩年月日压控阶梯波发生器(数字类)(一)设计任务在规定时间内设计并调试一个由电压控制的阶梯波发生器。
(二)设计要求1、输出阶梯波的频率能被输入直流电压所控制,频率控制范围为600Hz至1000Hz。
2、输出阶梯波的台阶级数为10级,且比例相等。
3、输出阶梯波的电压为1V/级。
4、输入控制电压的范围0.5V至0.6V。
5、电路结构简单,所用元器件尽量少,成本低。
(三)调试要求利用实验室设备和指定器件进行设计、组装和调试,达到设计要求,写出总结报告。
(四)方案选择在压频转换部分存在两种方案。
1、Lm358组成压频转换电路;2、NE555构成压频转换电路。
方案论证数字电路精确度较高、有较强的稳定性、可靠性和抗干扰能力强,数字系统的特性不易随使用条件变化而变化,尤其使用了大规模的继承芯片,使设备简化,进一步提高了系统的稳定性和可靠性,在计算精度方面,模拟系统是不能和数字系统相比拟的。
数字系统有算术运算能力和逻辑运算能力,电路结构简单,便于制造和大规模集成,可进行逻辑推理和逻辑判断;具有高度的规范性,对电路参数要求不严,功能强大。
为了得到更精彩的波形采用数模混合方案。
(五)实验元器件和芯片运算放大器Lm358,TTL电路74LS20、74LS161、74LS175,CMOS缓冲器CD4010,稳压管,二极管1N4148,电位器,电容,电阻。
(六)设计方案整体设计思路:压频转换→计数器→权电阻→运放=>阶梯波利用Lm358组成压频转换电路;使用CD4010缓冲,形成可被数字电路识别的矩形波信号;74LS161与74LS20组合构成十进制计数器;利用74LS175提高负载、整流信号,并组成权电阻网络;最后利用运放放大信号,并输出。
仿真电路图:详细设计: 压频转换部分:V1 2 V C11uFR1100kΩR25kΩR31kΩR4100kΩR5100kΩU174LS161NQA 14QB 13QC 12QD 11RCO 15A 3B 4C 5D 6ENP 7ENT 10~LOAD 9~CLR 1CLK2U274LS175D1D 4CLK 91Q 2~CLR 12D 53D 124D 13~1Q 3~2Q 63Q 10~3Q 112Q 74Q 15~4Q14U3A74LS20D5U4ALM358D32481U5ALM358D 32481U6ALM358D3248134U7A40106BD_5V6R6100kΩKey=A 50%GNDVDD 15V VDD 15V VEE-15VVEE -15VVEE -15VVDD15V VEE VEEVDDVDDR71kΩVCC 5V R81kΩR92kΩR104kΩR118kΩR122kΩKey=A 50%R132kΩKey=A 50%R142kΩKey=A 50%R152kΩKey=A50%1718192021222324VEE VDDR161kΩ0R17680Ω27R182kΩ26XSC1ABExt Trig++__+_1211D11N4148109830729VCCGND D21N575815251228压频转换将一定的输入电压按线性的比例关系转化成频率信号,当输入电压变化时,输出频率也相应变化。
北京工业大学电子工程设计--二阶实验报告

电子工程设计第二阶段设计报告电子工程设计第二阶段设计报告11电子工程设计第二阶段报告题目:温度测量系统专业: 通信工程小组: 14 姓名学号: 张亦驰 于伦指导教师: 司农完成日期:2011.12.20目录目录温度控制系统温度控制系统一 总述………………………………………………………总述………………………………………………………3 3二 设计任务与要求…………………………………………设计任务与要求…………………………………………3 3三 单片机……………………………………………………单片机……………………………………………………4 4四 D/A 转换电路……………………………………………转换电路……………………………………………8 8五 A/D 转换电路……………………………………………转换电路……………………………………………11 11六 显示键盘电路……………………………………………显示键盘电路……………………………………………14 14七 温度测量系统……………………………………………温度测量系统……………………………………………22 22 八 心得体会…………………………………………………心得体会…………………………………………………25 25九 附录………………………………………………………附录………………………………………………………26 26摘要:摘要:第一阶段我们已经完成了电源板和变送器。
本学期的第二阶段要求是完成这个系统中单片机,个系统中单片机,A/D A/D A/D,,D/A 转换电路和显示与键盘控制电路部分。
温度控制系统总体概述(一)、总述电子工程设计训练是一门综合理论知识,实践操作,电子电路系统的设计、实现、调试、调试、故障排查等方面的综合性训练。
故障排查等方面的综合性训练。
故障排查等方面的综合性训练。
第一阶段只完成了电源以及变送器第一阶段只完成了电源以及变送器部分。
本阶段工作量非常大,需要完成单片机,数模,模数转换电路和显示与键盘控制电路部分,并且完成测温系统的测试。
最新北方工业大学计算机专业编译原理实验报告——语法分析器详细代码报告
(2)用程序自动生成该文法的算符优先关系矩阵。
(3)对人工输入的句型或句子,分析该句型或句子是否合法,能否用已知文法推出。
(4)具有通用性。所开发的程序可适用于不同的文法和任意输入串,且能判断该文法是否为算符优先文法。
(5)有运行实例。对于输入的文法和符号串,所编制的语法分析程序应能正确判断此串是否为文法的句子,并要求输出分析过程。
return 1;
else
return 0;
}
int less(int t,char a)
{
if(M[ch_di(stack[t])-1][ch_di(a)-1]==-1)
return 1;
else
return 0;
}
int equal(int t,char a)
{
if(M[ch_di(stack[t])-1][ch_di(a)-1]==0)
FIL符号栈的大小与输入字符串的大小以及算术表达式字符串的大小
char stack[N],strings[N],oldstrings[N];
char a;
int top=-1,k=0,step=1,n=0,No[N],id=1;
//二维数组定义字符之间的优先关系(1表示>,-1表示<,0表示=,-2表示错误)
// # < < < < < ? < =
//----------------------------------
#include <iostream>
#include <cstdio>
#include <iomanip>
电子工程设计实践课程情况介绍

• μCLinux进程间通信实验和设备驱动程序调试实 验(演示)(1学时)
精选ppt
6
(一)熟悉实验装置及ARM SDT开发软件的 使用(4学时)
• 熟悉实验装置
• ARM7处理器指令系统实验
熟悉ARM指令及SDT开发环境,使用ARM汇编语言编写 简单的GPIO实验
• JTAG调试器和ARM Debugger使用实验
任务1
任务2 定时中断
任务3
精选ppt
16
• 使用定时器作任务延时,中断返回后做任务切换
观察中断服务程序对现场的保护,中断服务程序做任务切换时对任务 栈使用情况
任务1
任务2 定时中断
任务3
精选ppt
17
• 加入串口中断和任务4,由串口中断唤起任务4
观察中断服务程序对现场的保护,中断服务程序做任务切换时对任务 栈使用情况
• USB控制器 PDIUSBD12(演示) 理解USB 1.1协议,编写硬件驱动程序及上层测试程序
• 100M 网卡芯片SMSC91C113(演示) 编写网卡驱动程序 理解IP协议,UDP协议,编写UDP协议
精选ppt
13
(三)嵌入式操作系统μC/OS-II移植及 使用(演示)
• μC/OS-II操作系统向S3C44B0移植 理解μC/OS-II操作系统的工作原理,修改与硬件相关部 分的代码
2. 立项研究与建设:1996~1997年
• 课程开出:1998年
3. 课程情况
• 概况:180学时,6学分,分散在3个学期进行,全部在实验
室操作实施
• 性质:专业必修课
• 对象:电子信息工程、通信工程、电子科学与技术
• 受益学生:5个年级3个专精业选约ppt1600多名本科学生
电子工程设计实验报告(美图)
北京工业大学耿丹学院电子工程设计实验报告系部 : 信息工程系专业 : 电子信息工程班级 : 09-2姓名 : 任萌萌周晟浩学号:090202230 090202224指导教师姓名 : 曹艳丽第一部分电子工程设计介绍一、目的和意义电子工程设计是在学生学习电子技术和单片机技术的基础上,以单片机系统设计为主要内容的实践课程。
通过该课程的学习和训练,使学生熟悉单片机应用系统的基本组成原理,结构和实现过程。
学会应用系统的设计,制作和调试的基本技能,学会基本应用程序的编制和调试。
从而在实际动手能力方面得到训练,高分析问题和解决问题的能力,培养良好的科学作风和与其他人合作的团队精神。
主要任务电子工程设计(二)工64学时。
分为两个阶段工作:综合实验部分和应用系统设计部分。
两部分相互关联,从简单到复杂,循序渐进。
(1)综合实验部分:以EL-MUT-III单片机实验系统为硬件环境,每组完成4个综合实验中的2个,涉及电路的设计、实现(插接线)、编程和调试。
包括了显示电路、键盘电路、开关量的输入、输出电路。
(2)应用系统设计部分:要求自己设计电路,并且在网孔板上通过布线、焊接、安装,实现系统的硬件结构,并通过开发系统进行编程和调试,实现系统功能。
一、电子工程设计课题的技术指标与功能要求(1)综合实验部分:通过熟练的掌握EL型微处理器教学实验系统的使用方法与单片机汇编语言的编程方法,实现在数码管上显示0循环和模拟交通灯信号。
(2)应用系统设计部分:根据模块的要求设计接口和辅助电路,有详细的电路连接图,图纸规范,详细,正确,电路焊接牢固,布局合理,接线整齐,程序设计结构合理,易读性较好,有功能性注释,最终通过A/D转换对0-5V输入信号进行采样,将0-255H显示在LED显示块上,通过D/A转换能够用3个键盘控制三角波、方波、正弦波的输出。
第二部分综合实验部分一、循环程序设计 1、循环程序方案说明用LED 显示块一次显示0,1,2,3,4,5,6,每次显示停留3s ,然后显示1,2,3,4,5,6,。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//左循迹红外传感器状态 //右循迹红外传感器状态
int servopin=2;//设置舵机驱动脚到数字口 2 int myangle;//定义角度变量 int pulsewidth;//定义脉宽变量 int val;
void setup() {
Serial.begin(9600); // 初始化串口 //初始化电机驱动 IO 为输出方式 pinMode(Left_motor_go,OUTPUT); // PIN 8 (PWM) pinMode(Left_motor_back,OUTPUT); // PIN 9 (PWM) pinMode(Right_motor_go,OUTPUT);// PIN 10 (PWM) pinMode(Right_motor_back,OUTPUT);// PIN 11 (PWM) pinMode(key,INPUT);//定义按键接口为输入接口 pinMode(beep,OUTPUT); pinMode(SensorRight, INPUT); //定义右循迹红外传感器为输入 pinMode(SensorLeft, INPUT); //定义左循迹红外传感器为输入 pinMode(HongLeft,INPUT); pinMode(HongRight,INPUT); //初始化超声波引脚 pinMode(Echo, INPUT); // 定义超声波输入脚 pinMode(Trig, OUTPUT); // 定义超声波输出脚 pinMode(servopin,OUTPUT);//设定舵机接口为输出接口 } //=======================智能小车的基本动作========================= void start() { int i;
五、开发平台 Arduino 对各个部分的控制 第一阶段预期可以实现控制小车前进,停止 第二阶段在安装舵机后,实现控制舵机转动 第三阶段完成超声模块的调试
六、系统整体调试 基础功能是通过车体上的红外接收头进行普通的循迹,最后课题目标是在舵机控制超声模块转动的前提
下,小车可以扫描周围障碍搜索前进。
一、主要部分设计 (1)、电机驱动部分 电机驱动原理图如下所示
for(i=0;i<100;i++)//输出另一个频率的声音 {
digitalWrite(beep,HIGH);//发声音 delay(4);//延时 2ms digitalWrite(beep,LOW);//不发声音 delay(4);//延时 2ms } }
void run() // 前进 {
digitalWrite(Right_motor_go,HIGH); // 右电机前进 digitalWrite(Right_motor_back,LOW); analogWrite(Right_motor_go,100);//PWM 比例 0~255 调速,左右轮差异略增减 analogWrite(Right_motor_back,0); digitalWrite(Left_motor_go,HIGH); // 左电机前进 digitalWrite(Left_motor_back,LOW); analogWrite(Left_motor_go,97);//PWM 比例 0~255 调速,左右轮差异略增减 analogWrite(Left_motor_back,0); //delay(time * 100); //执行时间,可以调整 }
超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍 物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见, 超声波测距原理与雷达原理是一样的。
测距的公式表示为:L=C×T
式中 L 为测量的距离长度;C 为超声波在空气中的传播速度;T 为测量距离传播的时间差 (T 为发射到接收时间数值的一半)。
实验内容
L293D 根据网上查到的芯片手册有如下的功能
L293 和 L293D 四倍高电流 H 桥驱动程序。 L293 是提供双向驱动电流高达 1 A,电压 是从 4.5 V 至 36 V 的;L293D 提供双向驱动电流高达 600 毫安,电压是从 4.5 V 至 36 V 的。两个设备是专为 驱动等感性负载继电器,电磁阀,直流双极步进和马达,也可以给其他高电流/高电压提供电源负载。 兼容所有的 TTL 输入。每个输出都是推拉式驱动电路,与达林顿三极管和伪达林源。启用 1,2 EN 驱动器和 3,4 EN 驱动器。当使能输入为高电平时,相关联的驱动器被启用和他们的 输出处于活动状态,并在其输入端的同相。当使能输入为低,这些驱动器被禁用
digitalWrite(beep,HIGH);//发声音 delay(2);//延时 2ms digitalWrite(beep,LOW);//不发声音 delay(2);//延时 2ms } for(i=0;i<100;i++)//输出另一个频率的声音 { digitalWrite(beep,HIGH);//发声音 delay(3);//延时 2ms digitalWrite(beep,LOW);//不发声音 delay(3);//延时 2ms }
int Left_motor_go=9; //左电机前进(IN2)
int Right_motor_go=10; // 右电机前进(IN3) int Right_motor_back=11; // 右电机后退(IN4)
int key=12;//定义按键 A2 接口 int beep=13;//定义蜂鸣器 A3 接口
北京工业大学
专业课程设计 研发课题结题报告
院、系(所) 电子信息与控制工程学院
专 业 名 称 电子信息工程
姓名(学号)
吕祎 12021027
同组参与者
周鸿宇 12021031
指导教师
徐小平
北京工业大学通信电路实验室 二 0 一五年九月
论文题目 基于超声波测距技术的智能避障小车设计
课题的目的,国内外研究现状和发展趋势:
真值表为 输入
输出
电机转动方
向
A1
EN1
A2
EN2ห้องสมุดไป่ตู้
Y1
Y2
*****
1
1
0
1
1
0
正转
0
1
1
1
0
1
反转
1
1
1
1
1
1
停
0
1
0
1
0
0
停
X
0
X
0
Z
Z
停
注:EN1,EN2 出现低电平无论 A1,A2 是什么电平都是高阻 (2)红外循迹模块的设计 红外循迹需要分成两部分设计,一部分是红外检测,一部分是发送接收。 首先应由红外发送接收部分把是否检测到前方有物体转换成模拟信号,再送给红外检测部分判断出是否前方 有物体 红外发送接收部分原理图:
本课题的目的是研究超声波测距技术的应用,研究该技术的原理,应用范围,利用超 声波测距时的优缺点。由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而 超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波 检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实 用的要求,因此在移动机器人研制上也得到了广泛的应用。
初步设计的原理图如下:
初步设计的系统流程图如下:
三、开发平台的调试,基础循迹模块可以对车前目标作出反应 开发平台使用 Arduino IDE。循迹模块是开发平台订购好的,测试即可。但是需要调试循迹距离
四、完成系统的硬件电路连接图的设计和电路实物的连接 硬件包括车体组装,AVR 单片机的安装,两个减速电机的安装,舵机安装
图中的 RPR220 是反光型光电探测器:
其中发射器是一个红外二极管,接收器是一个硅平面光电三极管。内部电路图如下:
当得到上一个模块的电平信号后,需要到红外检测模块检测,原理图如下、
其中 LM324 芯片是一个电压比较器,由于比较简单,不再附加芯片资料。原理图中还应注意 OUT1、2、3、4 除了接到 LED 灯还接到了单片机的 8、9、10、11 数字管脚。 (3)超声波避障模块设计 超声波避障模块采用的是 HC-SR04 超声波传感器它的工作原理是:
int Echo = A1; // Echo 回声脚(P2.0) int Trig =A0; // Trig 触发脚(P2.1)
int Front_Distance = 0;// int Left_Distance = 0; int Right_Distance = 0;
int Left_motor_back=8; //左电机后退(IN1)
其输出关闭,在高阻抗状态。【PS:1,2EN 为 1 和 2 的使能端(高电平使能);3,4EN 同理】用适当的数据 输入端,每对驱动程序的形式一个完整的 H 桥可逆驱动器适用于电磁阀或电机应用。 L293,外部输出为高速钳位二极管,应使用电感的瞬态抑制。VCC1 和 VCC2 分开,提供逻辑输入,以尽量 减少设备功耗。L293 和 L293D 的工作温度是从 0°C 至 70°C 由此设计的电机驱动电路如下:
二、电路搭接 由于是网上购买的套件,采用的是面包板杜邦线插接,所以不需要焊接。基本接线结果如下
面包板上是一个按键开关和蜂鸣器,按键是放置程序烧录完小车自主运动,蜂鸣器是用于检测程序是不是已 经启动,比较简单不再赘述其设计。 三、程序设计 附录中有完全的程序代码。编译环境使用的是基于 JAVA 开发环境的 IDE,语言逻辑和 C 语言基本一样。程序 设计流程图因为开始设计的太简易所以我重新设计了一下。 流程解释:因为自己加了一个按键启动,所以首先要按键扫描判断是否有按键按下,启动后会听到蜂鸣器的 启动音。之后小车自主前进,首先第一级避障是红外避障。之所以把红外避障选为第一级是因为红外避障反 应速度快,收到信号以后直接就能反应。而超声需要获取左右两边的距离然后比较。但是红外避障死角比较 多,而且由于小车有一定的速度红外经常来不及反应,最重要的一点就是红外避障受外界光线,地面的反光 灯影响准确性不可靠。红外避障的下移级判断就是超声避障: