第2章 自由振动分析-1-修改1汇总
机械振动学_第二章单自由度振动系统

第二章单自由度系统振动§1-1 概述单自由度系统的振动理论是振动理论的理论基础。
(1)尽管实际的机械都是弹性体或多自由度系统,然而要掌握多自由度振动的基本规律,就必须先掌握单自由度系统的振动理论。
此外,(2)许多工程技术上的具体振动系统在一定条件下,也可以简化为单自由度振动系统来研究。
[举例如下:]例如:(1)悬臂锤削镗杆;(2)外圆磨床的砂轮主轴;(3)安装在地上的床身等。
[力学模型的简化方法]若忽略这些零部件中的镗杆、主轴和转轴的质量,只考虑它们的弹性。
忽略那些支承在弹性元件上的镗刀头、砂轮、床身等惯性元件的弹性,只考虑它们的惯性。
把它们看成是只有惯性而无弹性的集中质点。
于是,实际的机械系统近似地简化为单自由度线性振动系统的动力学模型。
在实际的振动系统中必然存在着各种阻尼,故模型中用一个阻尼器来表示。
阻尼器由一个油缸和活塞、油液组成。
汽车轮悬置系统等等。
[以上为工程实际中的振动系统]单自由度振动系统——指用一个独立参量便可确定系统位置的振动系统。
所有的单自由度振动系统经过简化,都可以抽象成单振子,即将系统中全部起作用的质量都认为集中到质点上,这个质点的质量m 称为当量质量,所有的弹性都集中到弹簧中,这个弹簧刚度k称为当量弹簧刚度。
以后讨论中,质量就是指当量质量,刚度就是指当量弹簧刚度。
在单自由度振动系统中,质量m、弹簧刚度k、阻尼系数C是振动系统的三个基本要素。
有时在振动系统中还作用有一个持续作用的激振力P。
应用牛顿运动定律,作用于一个质点上所有力的合力等于该质点的质量和该合力方向的加速度的乘积。
(牛顿运动定律)(达伦培尔原理)现取所有与坐标x 方向一致的力、速度和加速度为正,则:kx x C t P xm --= ωsin 0 (牛顿运动定律) (达伦培尔原理:在一个振动体上的所有各力的合力必等于零) (动静法分析:作用在振动体上的外力与设想加在此振动体上的惯性力组成平衡力系)上式经整理得,t P kx x C xm ωsin 0=++ (2.1) 该式就是单自由度线性振动系统的运动微分方程式的普遍式。
第二章自由振动

第二章自由振动2.1 引言本章讨论1自由度线性系统的自由振动,即振系在受到初始激扰后的振动。
应用牛顿运动定律,列出确定这种振动规律的微分方程,说明其求解方法,得出位移与速度的表达式以及频率与周期的公式。
对理想的无阻尼振系,还应用了能量守恒原理,列出微分方程,或者不通过微分方程而直接导出预率与周期的公式,无阻尼振系的自由振动是简谐运动。
振动一经开始后,就可以无限期地进行,振幅大小不变。
实际的系统都是有阻尼的。
本章中假定阻尼力与相对速度成正比。
如果阻尼达到或大于某一临界值,系统的自由运动就不是振动。
只有阻尼小于临界值,自由振动才可以发生,但这时振系的机械能不断耗散,振幅不断减小,以至振动完全停息。
有阻尼系统的自由振动是衰减振动。
2.2 简谐振动工程中一些简单的振动向题,有时可以简化为图2.2—1所示的弹簧—质量系统的运动问题。
光滑水平面上的小物体,质量为m,由螺旋弹簧连至定点D。
弹簧重量可以不计,在不受力时为长度为0l,轴线成水平。
沿弹簧轴线取坐标轴x,以弹簧不受力时的右端位置O为原点,向右为正。
假定物体只限于沿坐标轴x进行直线运动,则物体在任一瞬时的位置都可以由坐标x完全确定。
这是1自由度系统。
图2.2-1作用于物体的力,除重力与光滑水平面的反力互相抵消外,只有弹簧力。
在原点O,弹簧力等于零,这是物体的静平衡位置。
当物体从这位置偏离x时,设在O的右侧,x有正值,弹簧受拉伸,它作用于物体的力水平朝左;设在O的左侧,x有负值,弹簧受压缩,它作用于物体的力水平朝右。
可见弹簧力总是指向原点O,力图使物体回到静平衡位置,这种力称为恢复力。
假设用手把物体从位置O向右拉至距离x后,使它静止,则在放手后,物体将在弹簧力的作用下向左加速运动;回到位置O时。
弹簧力变为零,但物体具有速度,由于惯性将继续向左运动;越过原点O后,弹簧力使物体减速,直到速度等于零,此时弹簧力又使物体开始向右运动。
这样,物体将在平衡位置的附近进行往复运动。
第二章 旋转机械振动分析基础汇总
第二章 旋转机械振动分析基础振动在设备故障诊断中占了很大的比重,是影响设备安全、稳定运行的重要因素。
振动又是设备的“体温计”,直接反映了设备的健康情况,是设备安全评估的重要指标。
一台机组正常运行时,其振动值和振动变化值都应该比较小。
一旦机组振动值变大,或振动变的不稳定,都说明设备出现了一定程度的故障。
第一节 振动分析的基本概念振动是一个动态量。
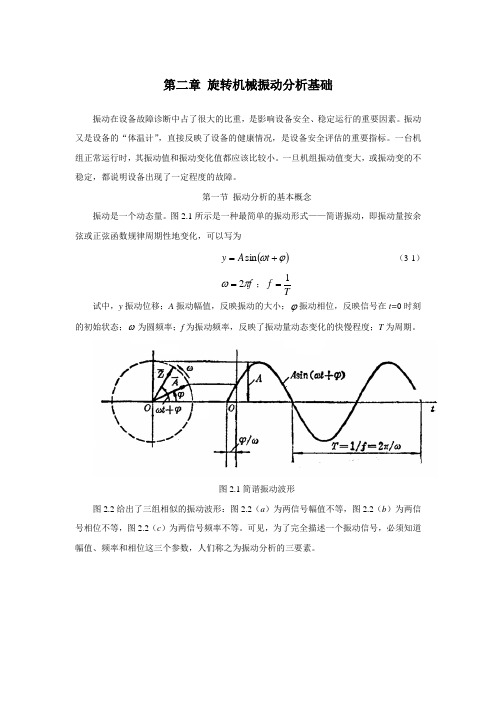
图2.1所示是一种最简单的振动形式——简谐振动,即振动量按余弦或正弦函数规律周期性地变化,可以写为()ϕω+=t A y sin (3-1)f πω2=;Tf 1= 试中,y 振动位移;A 振动幅值,反映振动的大小;ϕ振动相位,反映信号在t=0时刻的初始状态;ω为圆频率;f 为振动频率,反映了振动量动态变化的快慢程度;T 为周期。
图2.1简谐振动波形图2.2给出了三组相似的振动波形:图2.2(a )为两信号幅值不等,图2.2(b )为两信号相位不等,图2.2(c )为两信号频率不等。
可见,为了完全描述一个振动信号,必须知道幅值、频率和相位这三个参数,人们称之为振动分析的三要素。
(a)幅值不等;(b)相位不等;(c)频率不等图2.2 三组相似的振动波型简谐振动时最简单的振动形式,实际发生的振动要比简谐振动复杂的多。
但是根据付立叶变换理论知道,不管振动信号多复杂,都可以将其分解为若干具有不同频率的简谐振动。
图2.3 付立叶变换图解旋转机械振动分析离不开转速,为了方便和直观起见,常以1x表示与转动频率相等的频率,又称为工(基)频,分别以0.5x、2x、3x等表示转动频率的0.5倍、2倍、3倍等相等的频率,又称为半频、二倍频、三倍频。
采用信号分析理论中的快速傅立叶变换可以很方便地求出复杂振动信号所含频率分量的幅值和相位。
目前频谱分析已成为振动故障诊断领域最基本的工具。
频谱分析所起的作用可以概括为以下两点:1)特定故障的频率特征具有必然性。
例如,转子不平衡的频率为工频,气流基振和油膜振荡等故障的频率为低频,电磁激振等故障为高频。
振动理论-第1,2章 单自由系统振动

1.2 振动系统的模型及其分类
5. 按描述振动系统的微分方程分类
线性振动 能用常系数线性微分方程描述的振动 非线性振动 只能用非线性微分方程描述的振动
第2章 单自由度系统的振动
1.2 振动系统的模型及其分类
6. 按激励(动荷载)分类
动荷载
确定
周期
简谐荷载 非简谐荷载
冲击荷载
刚柔耦合系统
·对于大型振动系统可以部分采用离散系统模型,部分采用连续系统模型.
总之,建立振动系统的模型应力求简单,能准确反映客观 实际,且计算结果在工程允许的范围内.
第2章 单自由度系统的振动
1.2 振动系统的模型及其分类
2. 按振动系统的自由度数分类
单自由度振动系统 确定系统在振动过程中任何瞬时几何位置只需要 一个独立坐标的振动
Fs2 k2 (x2 x1)
Fs Fs1 Fs2 k1(x2 x1) k2 (x2 x1) keq(x2 x1)
所以等效弹簧刚度为
第2章 单自由度系统的振动
keq k1 k2
(2-1) (2-2)
2.1 单自由度系统的自由振动
n
keq ki i 1
串联时弹簧的等效刚度
(2-3)
第第22章章 单单自由自度由系度统系的振统动的振动
2.1 单自由度系统的自由振动
弹性元件的组合
在实际工程系统中,常常会有多个弹性元件以各种形式 组合在一起的情况,其中最典型的是并联和串联两种形式, 分别如图2-4(a)和2-4(b)所示。
图2-4 弹簧的组合
并联时弹簧的等效刚度
Fs1 k1(x2 x1)
第1章 绪论
第2章 单自由度系统的振动
第1章 绪论
2-单自由度自由振动

第2章 单自由度系统自由振动
2.5 具有黏性阻尼的振动系统
31
给出初始条件:t=0时 x x0 , x v0
则可确定系数B和D B v0 ( 2 1)n x0 2n 2 1
D v0 ( 2 1)n x0 2n 2 1
第2章 单自由度系统自由振动
2.5 具有黏性阻尼的振动系统
不大,特别是当阻尼很小(<<1)时,可
以忽略阻尼对振动频率和周期的影响。
第2章 单自由度系统自由振动
2.5 具有黏性阻尼的振动系统
40
2.6 对数衰减率
振幅衰减的快慢程度可用相邻振幅 的比值来表示,称为衰减率或减幅率或 减缩率;也可以用衰减率的自然对数来 表示,称为对数衰减率。
第2章 单自由度系统自由振动
第2章 单自由度系统自由振动
2.3 能量法
22
P15例2-3-2 利用能量法求纯滚动圆盘 系统作微幅振动的固有频率。
第2章 单自由度系统自由振动
2.3 能量法
23
2.4 瑞利法
一般不考虑弹性元件的质量对振动系统的 影响,若这些质量不可忽略的时候,“瑞利法” 的思想,是将这些弹性元件所具有的多个集中 质量或分布质量简化到系统的集中质量上去, 从而变成典型的单自由度振动系统。
T 2 n
周期是系统振动一次所需要的时间,单位 为秒(s)。
周期的倒数称为频率,是系统每秒钟振动 的次数,单位为1/秒(1/s)或赫兹(Hz)。记作 f
f 1 n T 2
第2章 单自由度系统自由振动
2.2 自由振动系统
13
固有频率n和频率 f 只相差常数2,因
此经常通称为固有频率。是振动分析中极
已知质量为m,弹簧的刚 度系数为k。取质量的静平衡 位置为坐标原点,当重物偏离 x 时,利用牛顿定律可得到运 动微分方程:
第二章 单自由度系统振动的理论及应用

M t
则得
2 .. n 0
通解为:
A sin(n t 0 )
代入:
将振动的初始条件t= 0 , 0 , . 0.
A
.0 2 0 2 n
2
n 0 0 arctan . 0
例: 已知:质量为m=0.5kg的物体沿光滑斜面无初速度滑下。 当物块下落高度h=0.1m时,撞于无质量的弹簧上, 并与弹簧不再分离,弹簧刚度系数k=0.8kN/m。 倾角 30 求:此系统振动的固有频率和振幅并给出物块的运动方程。
计算固有频率的能量法
无阻尼自由振动系统没有能量的损失,振动将永远持续下去. 在振动过程中,系统的动能与弹簧的势能不断转换,但总的机械能 守恒.因此,可以利用能量守恒原理计算系统的固有频率. 如图所示无阻尼振动系统 当系统作自由振动时,运动规律为:
x A sin(0t )
速度为:
dx v 0 A cos(0t ) dt
称为单自由度线性纵向振动系统的运动微分方程式,又称单 自由度有粘性阻尼的受迫振动方程.
可分为如下几种情况进行研究:
(1)当c=0,F(t)=0时, 该方程为单自由度无阻尼自由振动方程.
(2)当F(t)=0时, mx cx kx 0 该方程为单自由度有拈性阻尼的自由振动方程.
.. .
mx .. kx 0
由机械能守恒定律有
Tmax Vmax
即
1 1 2 2 J 0 Φ ( k1l 2 k 2d 2 )Φ 2 2 2
解得固有频率
0
k1 l 2 k 2 d 2 J
例: 已知:如图表示一质量为m,半径为r的圆柱体,在一半 径为R的圆弧槽上作无滑动的滚动。 求:圆柱体在平衡位置附近作微小振动的固有频率。
机械振动学第2章第1、2、3、4节
x(t
)
x0
cosnt
x0
n
sin
nt
A1 A2
xx00
n
(2.1-10)
比较方程(2.1-4)和(2.1-10),并利用方程(2.1-
6)可以得到振幅A和相角的值。
A
x02
x0
n
2
① 或②
tan1 x0
n x0
tan 1
ωn x0 x 0
(2.1-11)
现在来看由弹簧悬挂的物体(图2.1-3)沿铅直方 向的振动。
Tmax Umax
(2.2-3)
例2.2-1 有一个重量为W,半径为r的实心圆柱 体,在半径为R的圆柱形面上无滑动地滚动,如图 2.2-1所示。假设该滚动的圆柱体进行简谐运动,
试求它绕平衡位置作微小摆动时的固有频率n。
解:圆柱体在摆动时
有两种运动:移动和滚
动。设坐标如图2.2-1
所示。
图 2.2-1
第二章 单自由度系统的自由振动
●任何具有质量和弹性的系统都能产生振动, 若不外加激励的作用,振动系统对初始激励的 响应,通常称为自由振动。
●保守系统在自由振动过程中,由于总机械 能守恒,动能和势能相互转换而维持等幅振动, 称为无阻尼自由振动。
●实际系统不可避免存在阻尼因素,由于机 械能的耗散,使自由振动不能维持等幅而趋于 衰减,称为阻尼自由振动。
U W (R r)(1 cos ) 2W (R r)sin 22
当圆柱体作微摆动时, sin ,因此系统的
势能为
2 2
U 1W (R r) 2
2
由式(2.2-2),有
d dt
(T
U
)
d dt
第2章 单自由度系统的受迫振动题解
习 题2-1已知系统的弹簧刚度k =800 N/m ,作自由振动时的阻尼振动周期为1.8s ,相邻两振幅的比值12.41=+i i A A ,若质量块受激振力t t F 3cos 360)(=N 的作用,求系统的稳态响应。
解:由题意,可求出系统的运动微分方程为t mxn x p x n 3cos 36022=++ 得到稳态解)3cos(α-=t B x其中m kB B B 45.03604)1(022220==+-=λζλ222122tg λζλωωα-=-=n p n 由d nT i iA A e 2.41===+η489.3π2797.0ln 8.1ln ======dd dd dT p T n T nT ηη 又22n p p n d -=有579.3222=+=n d n p n p p45.51255.1298.0374.0838.01838.0223.02tg 103.1408.045.0838.0223.04)838.01(45.0223.0579.3797.0838.0579.332222===-⨯⨯===⨯⨯+-=======ααζωλB p n p n n所以 x =1.103 cos(3t -51︒27')2-2一个无阻尼弹簧质量系统受简谐激振力作用,当激振频率ω1 =6rad/s 时,系统发生共振;给质量块增加1 kg 的质量后重新试验,测得共振频率ω2 =5.86rad/s ,试求系统原来的质量及弹簧刚度。
解:设原系统的质量为m ,弹簧常数为k 由m kp n =,共振时m kp n ==1ω 所以 mk =6 ①又由 当 86.512=+==m kp n ω ② ①与②联立解出 m =20.69 kg ,k =744.84 N/m2-3总质量为W 的电机装在弹性梁上,使梁产生静挠度st δ,转子重Q ,重心偏离轴线e ,梁重及阻尼可以不计,求转速为ω时电机在垂直方向上稳态强迫振动的振幅。
第二章单自由度系统的自由振动
f=1/T。
n
n —— 固有频率,振体在2秒内振动的次数。
反映振动系统的动力学特性,只与系统本身的固有 参数有关。
8
无阻尼自由振动的特点是: (1) 振动规律为简谐振动;
(2) 振幅A和初相位 取决于运动的初始条件(初位移和初速度); (3)周期T 和固有频率 n 仅决定于系统本身的固有参数(m,k,I )。
重物匀速下降时处于静 平衡位置,若将坐标原点取在绳被卡住瞬时重物所 在位置,则t=0时有:
x0 0 x0 v
其振动规律为: x x0 cos nt
n
x0
sin nt
13
解:
x0 0 x0 v
根据:
x x0 cos nt
n
x0
sin nt
1 ( 3 M m) x 2 2 2
以平衡位置为计算势能的零位置, 并注意轮心位移x时,弹簧伸长2x
U k [( st 2 x) 2 st 2 ] ( M m) gx 2 2kx2 2k st x ( M m) gx
因平衡时
2k st x (M m) gx
O l C mg
16
解:取图示坐标系,将直升机桨叶视为一物 理摆,根据绕固定铰的动量矩定理得到其 摆动微分方程
J 0 mgl sin
O l C mg
sin
n
mgl , J0
J0 mgl 0
J0 Tn 2 mgl
mgl J0 2 Tn2 4
m Tn 2 n k 2
固有周期
k / m g / s
10
固有频率及固有周期
k g wn m s
第二章单自由度系统自由振动)
(1)等效刚度
通常用能量法求复杂系统的等效刚度,即按实际系统要转化的弹簧 的弹性势能与等效系统弹簧势能相等的原则来求系统的等效刚度。
1、单自由度系统及其振动微分方程建立 (1)单自由度振动系统
(2)单自由度系统振动方程的建立方法 ①牛顿第二定律或达朗贝尔原理
f m&x& f m&x& 0 M J&& M J&& 0
例题2-1 (教材例题2.10) 建立如图所示振动系统的振动微分方程。
ml&x&
若动能达到最大Tm ax时取势能为0,则动能为0时,势能必取得最大值U m ax
Tm
ax=U
m
,可由此得到固有频率
ax
例题:求圆轴圆盘扭振系统的振动固有频率
T 1 m(l)2
2
U 1 k(a)2
2
d [1 m(l)2 1 k(a)2 ] 0
dt 2
2
可得 + k ( a )2 0
例题2-3
meq J m1r 2 m2 R2 keq (k1 k3 )r 2 (k2 k4 )R2
例题2-4 (教材例题2.4)
例题2-5 (教材例题2.5)
me
m
L
3
mA
J
mvb2 a2
1 3
msb2
例题2-6 (教材例题2.3、2.6) 求轴向轴转化的单轴系的等效刚度和等效旋转质量
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高等结构动力学
第二章
自由振动分析
高等结构动力学
第二章 自由振动分析
§2.1 基本动力体系的组成 §2.2 基本动力体系的运动方程 §2.3 重力的影响 §2.4 支座激励的影响------(第一讲) §2.5 无阻尼自由振动分析 §2.6 阻尼自由振动 §2.7* 广义单自由度体系:刚体集合 §2.8* 广义单自由度体系:分布柔性 §2.9* 广义体系的特性的表达式
G G cos iG sin
(2-22c)
利用这个表达式并注意到 cos sin( 2) 及 sin cos( 2) ,
容易证明一个矢量和i相乘,是该矢量在复平面中逆时针旋转 2 弧度和90度 的结果。同样,乘以-i可以看成是顺时针旋转90度的结果。现在令式(2-22c) 和式(2-22b)相等,同样注意到负的虚部分量对应于负的矢量角,这可得到 用于三角函数与指数函数变换的Euler对:
§2.1 基本动力体系的组成
§2.1 基本动力体系的组成
高等结构动力学
理想化单自由度体系(a)基本元件 (b)平衡力系
§2.2 基本动力体系的运动方程
§2.2 基本动力体系的运动方程 ➢ 直接平衡法 平衡表达式
fI fD fS p(t)
fI mv fD cv
fS kv
高等结构动力学
(2-1) (2-2a) (2-2b) (2-2c)
高等结构动力学
首先讨论复常数G,它可以如图2-4所示用复平面的一个矢量来表示。此图 表明矢量可用实、虚部cartesian分量来表示。
G GR iGI
(2-22a)
也可以在极坐标中用绝对值 G(即矢量的长度)和自实轴逆时针转过的角度
来表示:
G G exp(i )
(2-22b)
另外,由如图所示的三角关系,显然式(2-22a)可改写为
§2.2 基本动力体系的运动方程
高等结构动力学
单自由度体系的运动方程
mv cv kv p(t)
(2-3)
虚功原理
➢ 体系作的总功
fI v fD v fS v p(t) v 0
(2-4)
因 v 不为零
mv cv kv p(t)
(2-5)
§2.2 基本动力体系的运动方程
变分的概念
➢ 泛函的概念 ➢ 泛函的极值问题 ➢ 典型的变分问题
➢ 请大家看一本简明变分原理教程 ➢ 《弹性力学中的变分原理》张振清
高等结构动力学
§2.2 基本动力体系的运动方程
Hamilton原理的应用
体系动能
T 1 mv2 2
由弹簧表达的位能 V U 1 kv2 2
非保守力力所作功的变分
Wnc p(t) v cv v
由 k st W mv cv kv p(t)
mv cv kv p(t)
(2-6) (2-7)
(2-8) (2-9) (2-10) (2-11)
总挠度、应力即为动力结果与静力结果的和 v st v
§2.4 支座激励的影响
§2.4 支座激励的影响
高等结构动力学
支座激励对单自由度体系平衡的影响 (a)体系的运动; (b)平衡力系
(2-17)
§2.4 支座激励的影响
高等结构动力学
支座激励的第二种列式
将质量总位移 v vt vg
代入
mv cv kv 0
得 mvt cvt kvt cvg kvg
mvt cvt kvt cvg kvg peff (t) (2-18)
地震测量为加速度,速度和位移需要积分一次和两次 才可获得,少用!
由变分的 v 任意性可得 mv cv kv p(t)
§2.3 重力的影响
§2.3重力的影响——静力的影响
高等结构动力学
重力对单自由度体系平衡的影响
§2.3 重力的影响
高等结构动力学
mv cv kv p(t) W
弹簧力
v st v
fS kv k st kv
得
mv cv k st kv p(t) W
§2.5 无阻尼自由振动分析
§2.5 无阻尼自由振动分析
➢ 1 运动方程的解 ➢ 2 无阻尼自由振动
高等结构动力学
§2.5 无阻尼自由振动分析
1 运动方程的解
高等结构动力学
单自由度运动方程的普遍形式
m*v t c*vt k*vt p* t
(2-19)
§2.5 无阻尼自由振动分析
解的性质
高等结构动力学
高等结构动力学
(2-6a*) (2-6b*) (2-6c*)
§2.2 基本动力体系的运动方程
高等结构动力学
整理
t2 mvv cv v kvv p(t)vdt 0 t1
(2-7*)
t2 mv vdt mv v t2 t2 mv vdt (2-8*)
t1
t1
t1
由 v d v
dt
得到 t2 mv cv kv p(t)vdt 0 (2-9*) t1
§2.5 无阻尼自由振动分析
高等结构动力学
exp(i ) cos i sin exp(i ) cos i sin
(2-23)
此外,联立求解式(2-23a),可得Euler方程的逆形式:
cos 1 [exp(i ) exp(i )]
2
sin i [exp(i ) exp(i )]
§2.4 支座激励的影响
高等结构动力学
体系平衡 fI fD fS 0
惯性力 得
fI mvt mvt cv kv 0
质量总位移 vt v vg得源自mv mvg cv kv 0
(2-12) (2-13) (2-14) (2-15) (2-16)
mv cv kv mvg (t) peff (t)
式中G是任意的复常数, exp(st)表 e示st 指数函数。在后面 的讨论中将动力荷载和反应用复数表达往往是方便的, 因此现在简要地回顾复数的概念。
G GR iGI 或
G G exp(i )
G
G
GR G cos
iGI iG sin Re
图 2-4 复平面中的复常数表示法
§2.5 无阻尼自由振动分析
➢ 数学上:给定边界条件下二次微分方程的解; ➢ 力学上:荷载与初始条件下结构的反应。
§2.5 无阻尼自由振动分析
微分方程的解法
➢复数解法 ➢三角函数解法
高等结构动力学
§2.5 无阻尼自由振动分析
高等结构动力学
自由振动 mv t cvt kvt 0 (2-20)
解的形式
vt Gest
(2-21)