单自由度振动分析
单自由度无阻尼自由振动的系统分析

单自由度无阻尼自由振动的系统分析在结构动力学之中,单自由度体系的振动是最简单的振动,但单自由度体系的频率计算在结构动力学计算中有着十分重要的意义,因为从中我们能得到关于振动理论的一些最基本的概念和分析方法同时也为更复杂的多质点多自由度体系振动问题奠定基础,同时现实工程中也有许多振动问题可以简化为单自由度问题近似的利用单自由度振动理论去分析解决。
在单层厂房、水塔等建筑物中得到有效的利用结构的自由振动是指结构受到扰动离开平衡位置后,不再受到任何外力影响的振动过程,此处动力系统是否有阻尼项,会直接影响到动力系统的反应。
在此,我们把自由振动分为无阻尼自由振动与有阻尼的自由振动。
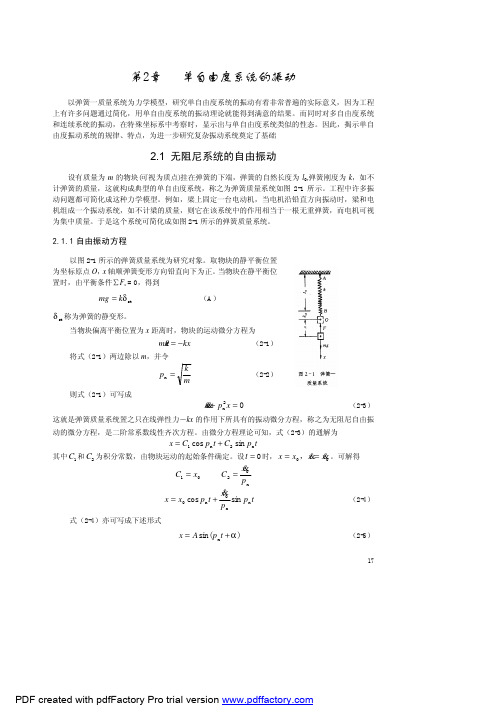
一、无阻尼自由系统的振动分析目前,以弹簧-质量系统为力学模型,研究单自由度系统的振动具有非常普遍的实际意义,因为工程中许多问题简化后,用单自由度体系的振动理论就能得到很好的解决。
而对多自由度系统和连续振动,在特殊坐标的考察时,也会显示出与单自由度系统类似的振动。
进行无阻尼自由振动分析的主要目的是为了获得系统固有振动的特性,只有充分地了解系统的自身振动特性才能有效的计算系统的动力响应,目前在单质点单自由度无阻尼自由振动体系中我们的运动方程为:0)()(..=+t ku t um (1) 或 0u(t))(=+ωt u (2)其中的ω是振动圆频率,是反应系统动力的重要参数,其计算公式为:m k m ==δω12 (3)由上式可以看出,ω只和系统的刚度及质量有关,而与系统所受到的初始受力状态无关。
ω的量纲与角速度相同为rad/s ,它反映了系统自由振动的快慢。
自由振动系统的这一特性,我们在日常生活中司空见惯。
比如,键盘类乐器标定后,按动某一个琴键,不管你按动的轻重如何,琴键所发出的声音的频率是一定的,按得轻或按得重仅影响声音的强弱。
(2)式经过三角函数的转换可表示为:)sin()(νω+=t A t u (4)其通解为t A t A t u ωωsin cos )(21+= 常数A 1与A 2与初始条件有关,01χ=A ωχ/02 =A式(4)是标准的简谐方程其中A 是其振幅,则ν是其初相角,他们的计算公式2020)(ωx x A += ,00arctan x x v ω=对于质点振动系统,质量越大,则系统的固有频率越低;刚度越大,则系统的固有频率越高。
结构力学课件之单自由度体系的振动

2.2 单自由度体系的强迫振动
单自由度体系的强迫振动的微分方程: y m ky P(t) y k P(t) 2 P(t) y 可写成: y m y 2. 当荷载为简谐荷载时: P(t) F sin t 2 m P(t) ky y F sin t y m 3. 微分方程的解为: m y m受力图 y F 2 1 2 (sint sin t) yst (sint sin t) m 1 2 1 2 为动力系数。 F yst 2 为静荷载F作用下的振幅。 1 2 m 时,振幅会趋近于无穷大,这种现象叫共振。
tg
1
y0 0 v
2.1 单自由度体系的自由振动
三、结构的自振周期 y 从微分方程的解: (t) a sin(t ) 知位移是周期函数; 自振周期T:振动一周需要的时间; T 2 2 m 2 m k 自振频率f:单位时间的振动次数; f 1 T 2 圆频率或角频率:2 时间内的振动次数; 2 2 2f k 1 T m m 自振周期的性质:
2 k EI 2 2 4 3 4 48EI 2 1 48EIg k 1 3 m m m Ql
11 5
EI
0.5l
1 EI
0.5l
0.25l 2n 2 500 52.36 / s 2. 荷载频率: 60 60 M 1 1 2 2 5.93 3. 动力系数: 为动力位移和动力应 52.36
1. 自振周期仅与结构的质量和刚度有关;与外界的干扰力无关。 2. 质量越大,周期越大; 刚度越大,周期越小。 3. 自振周期是结构动力性能的一个重要指标。
例1:图示等截面竖直悬臂杆,长度为l,截面面积为A,惯性矩 为I,弹性模量为E。杆顶重物的质量为m。杆的质量忽略不 计,试分别计算水平振动和竖向振动的自振周期。 解:解题的依据 T 2 2 m 2 m m k
单自由度系统振动
ϕ = Φ sin( pn t + α )
角速度及系统的最大动能分别为
&= ϕ
dϕ = Φpn cos( p n t + α ) dt 1 1 2 & max = I BΦ 2 p n I Bϕ 2 2
(a)
Tmax =
如取平衡位置为系统的势能零点。设在平衡位置时,弹簧的伸长量为δst 。此时,弹性力 Fst=kδst , 方向向上。
当物块在静平衡位置时,它的静位移 δ st 等于每根弹簧的静变形之和,即
δ st = δ 1st + δ 2 st
(d)
因为弹簧是串联的,其特征是:二弹簧受力相等,即每 根弹簧所受的拉力都等于重力 mg 。
δ 1 st =
mg mg , δ 2 st = k1 k2
(e)
如果用一根弹簧常量为 k 的弹簧来代替原来的两根弹簧, 此弹簧的静变形等于 δ st (图 2-3(b))。
图 2-5 扭振系统
20
PDF created with pdfFactory Pro trial version
定圆轴的抗扭刚度为 k n ,它表示使圆盘产生单位扭角所需的力矩。根据刚体转动微分方程建立该系 统的运动微分方程
&& = −k nϕ I Oϕ
令
pn =
代入式(2-6) ,自由振动的振幅为
2 gh
2 A = x0 +(
&0 2 x 2 ) = δ st + 2hδ st pn mgl 3 96 EJh (1 + 1 + ) 48 EJ mgl 3
梁的最大挠度为
2 δ max = A + δ st = δ st + 2hδ st + δ st =
单自由度振动系统的运动方程解析解的应用案例分析
单自由度振动系统的运动方程解析解的应用案例分析单自由度振动系统是机械工程中非常重要的一类振动系统。
它的运动方程可用解析解表示,这在许多实际问题的解决中发挥着重要作用。
本文将通过分析两个应用案例,展示单自由度振动系统运动方程解析解的实际应用。
案例一:弹簧振子考虑一个弹簧振子系统,由一个质量为m的物体通过一个弹簧与固定支撑相连。
假设摩擦系数为零,物体只有沿水平方向的振动。
根据牛顿第二定律可以得到以下运动方程:m a=−aa其中a是物体的加速度,k是弹簧的劲度系数,x是物体的位移。
通过简单的求解可以得到该系统的解析解为:a = a cos(a_0 t + a)其中A和a分别是振幅和相位,a_0 是系统的固有角频率,有关常数可以通过初始条件来确定。
这个方程给出了振子在任意时间点的位移,通过振幅和相位可以描述振动的特征。
在实际应用中,我们可以利用这个方程来分析弹簧振子的运动规律,如计算特定时刻的位移、速度和加速度等。
案例二:简谐受迫振动考虑一个简谐受迫振动系统,它除了由弹簧力驱动外,还受到外部激励力F(t)的作用。
运动方程可以表示为:m a=−aa +F(t)其中F(t)是外部激励力的函数形式,可以是任意周期性函数。
在这种情况下,运动方程没有解析解,但我们可以通过变换方法将其转化为解析解出现的形式。
一个常见的方法是利用复指数形式的解,并通过计算使运动方程等号两边的实部和虚部相等。
通过求解可以得到:a = a cos(a_0 t + a) + a_p其中a_p是该系统的稳态解,表示受迫振动的特定解,由外部激励力决定,A和a是自由振动的振幅和相位。
这个方程描述了受迫振动系统的运动,可以用于分析系统在不同激励力下的响应,如共振频率、相位差等。
总结起来,单自由度振动系统运动方程解析解的应用案例分析有助于我们深入理解振动系统的运动行为。
通过解析解,我们可以更好地预测和控制系统的振动特性,为相关工程问题提供解决思路。
单自由度振动系统固有频率及阻尼的测定-实验报告

4、根据相频特性的测试数据,在同一图上绘出几条相位差频率( 特性曲线,由此分析阻尼的影响并计算系统的固有频率及阻尼比。
5、根据实验现象和绘制的幅频、相频特性曲线,试分析对于不同阻尼的振动系统,几种固有频率和阻尼比测量方法的优劣以及原因。
首先,在水平振动台面上不加任何重物,测量系统在自由衰减振动时的固有频率;之后在水平振动台面上放置一个质量已知的砝码,再次测量系统在自由振动时的固有频率。记录两次测得的固有频率,并根据其估算水平振动台面的等效质量。
4、测定自由衰减振动特性:
撤去水平振动台面上的砝码,调整励磁电流至0.6A。继续使用“自由衰减记录”功能进行测试。操作方法与步骤3基本相同,但需按照数据记录表的提示记录衰减振动的峰值、对应时间和周期数i等数据,以计算系统的阻尼。
假设实验使用的单自由度振动系统中,水平振动台面的等效质量为 ,系统的等效刚度为 ,在无阻尼或阻尼很小时,系统自由振动频率可以写作 。这一频率容易通过实验的方式测得,我们将其记作 ;此时在水平振动台面上加一个已知质量 ,测得新系统的自由振动频率为 。则水平振动台面的等效质量为 可以通过以下关系得到: 。
、 的意义同拾振器。但对激振器说, 的值表示单位电流产生的激振力大小,称为力常数,由厂家提供。JZ-1的力常数约为5N/A。频率可变的简谐电流由信号发生器和功率放大器提供。
4、计算机虚拟设备:
在计算机内部,插有A/D、D/A接口板。按照单自由系统按测试要求,进行专门编程,完成模拟信号输入、显示、信号分析和处理等功能。
6、教师签名的原始数据表附在实验报告最后,原始数据记录纸在实验课上提供,必须每人交一份,可以采用复印、拍照打印等方式进行复制。原始数据上要写清所有人的姓名学号,不得使用铅笔记录。
单自由度系统自由振动

取物块的静平衡位置为坐标原点 O , x 轴顺弹簧 变形方向铅直向下为正。当物块在静平衡位置 时,由平衡条件,得到
mg k st
弹簧的静变形
当物块偏离平衡位置为x距离时,物块的运动微 分方程为
mx mg k ( st x)
mx kx
k 固有圆频率 令 : 0 m 无阻尼自由振动微分方程 2018年9 月4日
周期 T 2
0
; 则
1 0 2 2f T
f 称为振动的频率,表示每秒钟振动的次数,单位为1/s或Hz
0 称为固有角(圆)频率(固有频率),表示每2秒内振动
2018年9月4日 《振动力学》
的次数,单位为rad/s,只与系统的质量m和刚度系数k有关。
8
1.单自由度系统自由振动-无阻尼自由振动
统固有的物理参数,称为固有频率,振幅取决 于初始扰动的大小。阻尼振动的固有频率小于 无阻尼情形。临界阻尼和大阻尼条件下的系统 作非往复的衰减运动。
2018年9月4日 《振动力学》
3
单自由度系统自由振动
教学内容
• 无阻尼自由振动 • 能量法 • 等效质量和等效刚度 • 阻尼自由振动
2018年9月4日 《振动力学》
c1 A sin ,
c2 A cos
x t A sin 0 t
2018年9月4日 《振动力学》
无阻尼自由振动是简谐振动.
7
1.单自由度系统自由振动-无阻尼自由振动
1.2 无阻尼自由振动的特点
(1)固有频率
无阻尼自由振动是简谐振动,是一种周期振动
0 ( t T ) 0t 2
振动不能维持等幅而趋于衰减,称为有阻尼自由
单自由度体系自由振动,速度相位与位移相位的关系

单自由度体系(Single Degree of Freedom System, SDOF)是工程动力学中的一个重要概念,它对于描述系统的振动特性有着重要的作用。
在自由振动过程中,速度相位与位移相位之间存在着密切的关系。
本文将从单自由度体系自由振动的基本原理入手,探讨速度相位与位移相位之间的关系,希望通过本文的介绍,读者能够对这一问题有更加清晰的认识。
一、单自由度体系自由振动的基本原理1. 自由振动的基本概念自由振动是指在没有外界干扰的情况下,系统在一定的初位移或初速度作用下,由于其自身的惯性和弹性特性而产生的振动现象。
在工程领域中,自由振动是一种非常常见的振动形式,因此研究自由振动对于工程设计和分析有着重要的意义。
2. 单自由度体系的定义单自由度体系是指系统中只有一个自由度可以自由变化的体系。
在动力学领域中,单自由度体系被广泛应用于描述各种机械、土木和航空航天结构的振动特性。
它是一种简化模型,但对于许多实际工程问题的分析具有较高的适用性。
3. 自由振动的基本方程单自由度体系的自由振动可以通过一阶微分方程来描述。
其基本方程可以表示为:\[m\ddot{x}+c\dot{x}+kx=0\]其中,\(m\)为系统的质量,\(c\)为系统的阻尼系数,\(k\)为系统的刚度,\(x\)为系统的位移函数,\(t\)为时间。
二、速度相位与位移相位的定义1. 速度相位的定义在振动过程中,速度相位是指速度\(v\)相对于位移\(x\)的相位差。
通常用一个角度来表示,它可以用来描述振动的快慢和超前滞后关系。
2. 位移相位的定义位移相位是指位移\(x\)相对于某一固定参考点的相位差。
它也通常用一个角度来表示,可以用来描述振动的相对位置。
三、速度相位与位移相位的关系速度相位与位移相位之间存在着密切的关系。
在自由振动过程中,它们之间满足以下关系:\[tan(\phi_v-\phi_x)=\frac{2\zeta}{1-\omega^2}\]其中,\(\phi_v\)为速度相位,\(\phi_x\)为位移相位,\(\zeta\)为系统的阻尼比,\(\omega\)为系统的固有频率。
第三讲单自由度系统的振动(阻尼)解读

nt i
两端取自然对数得 其中
ln ln e nTd
nT
δ称为对数减缩系数
Td
2
0 1 2
c 0 2 m k
n
对数减缩率δ与阻尼比ζ之间的关系为:
n
2
0 1
2
2 1
2
2
( 2<<1 )
上式表明:对数减缩率δ与阻尼比ζ之间只差2π倍,δ也是反映阻尼
x
这种振动的 振 幅 是 随 时 间 A x0 不断衰减的, 称为衰减振动。 衰减振动的运 动图线如图所 示。 d
Ae nt
衰减曲线的包络线
A1
A2
A3
t
Td
x
由衰减振动的表达式:
Ae
A x0
nt
x Ae
nt
sin(d t )
A1
A2
A3
这种振动不符合周期振 动 f (t ) f (t nT ) 的定
机械振动学
2.1.2.单自由度系统的有阻尼自由振动
1.阻尼
上节所研究的振动是不受阻力作用的,振动的振幅是不随
时间改变的,振动过程将无限地进行下去。
实际中的振动系统由于存在阻力,而不断消耗着振动的能 量,使振幅不断地减小,直到最后振动停止。 振动过程中的阻力习惯上称为阻尼。 阻尼类型: 1)介质阻尼; 2)结构阻尼; 3)库仑阻尼
ωd =ω0 , Td =T
阻尼对振幅的影响
nt 2 2 x Ae sin( n t ) 由衰减振动运动规律: 0
Ae-nt相当于振幅
设在某瞬时ti,振动达到的最大偏离值为Ai有: 经过一个周期 Td ,系统到达另一个 比前者略小的最大偏离值Ai+1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
结构动力学三级项目班级:冶金五班小组成员:邱林凯李海洋张富张富增指导老师:王健2017年4月18日目录摘要 (2)单自由度系统的振动 (3)单自由度振动系统数学模型的建立 (3)参数设定与求解 (5)单自由度系统的强迫振动 (8)本章小结 (17)总结与心得 (17)摘要振动系统问题是个比较虚拟的问题,比较抽象的理论分析,对于问题的分析可以实体化建立数学模型,通过MATLAB可以转化成为图像。
单自由度频率、阻尼、振型的分析,我们可以建立数学模型,最后通过利用MATLAB编程实现数据图形;多自由度主要研究矩阵的迭代求解,我们在分析抽象的理论的同时根据MATLAB编程实现数据的迭代最后可以得到所要的数据,使我们的计算更加简便。
关键词:振动系统;单自由度;MATLAB;多自由度前言振动系统是研究机械振动的运动学和动力学,研究单自由系统的振动有着实际意义,因为工程上有许多问题通过简化,用单自由度系统的振动理论就能得到满意的结果。
模态是振动系统的一种固有振动特性,模态一般包含频率、振型、阻尼。
利用MATLAB编程并验证程序的正确性。
通过程序的运行,能快速获得多自由度振动系统的固有频率以及主振型,为设计人员提供了防止系统共振的理论依据,也为初步分析各构件的振动情况以及解耦分析系统响应奠定了基础。
在结构动力学中,单自由度系统的振动是最简单的运动,但这部分又十分重要。
因为从中可得到有关振动理论的一些基本的概念和解决问题的方法,同时它也适用于更为复杂的振动问题,是分析多自由度体系振动问题的基础。
因此,搞清楚了单自由度系统的振动,将有助于我们提高分析和解决其他各种振动问题的能力。
另外在实际工程中,确实有许多振动问题,可简化为单自由度问题,或近似地用单自由度理论去分析解决。
单自由度系统的振动单自由度振动系统数学模型的建立建立和分析有粘性阻尼时的自由度振动微分方程。
以静平衡位置为原点建立如图坐标,由牛顿定律得运动方程为[13]:0=++kx x c xm (2-1) 令mkm c n n ==2,2ω 其中n 称为衰减系数,单位为s 1;n ω是相应的无阻尼时的固有频率,式(2-1)可以写为:022=++x x n x n ω (2-2)如果进一步令xxc kxxmmcmnnως=(2-3)其中无量纲的ς称为相对阻尼系数,则式(2-2)可写为:022=++x x x n n ωςω (2-4)为了求解,令st e x = (2-6)代入(2-4)后得到特征方程:0222=++n n s s ωςω (2-7)他的两个特征根为:122,1-±-=ςωςωn n s (2-8)根据相对阻尼系数ς的不同大小,可以将阻尼分为三种状态:1>ς时为过阻尼,1=ς时为临界阻尼,10<<ς时为欠阻尼。
过阻尼状态1>ς,1s 与2s 是两个不等的负实根,令12*-=ςωωn (2-9)初始条件00)0(,)0(x xx x == (2-10) 系统初始条件响应为)()(**00*0t sh x xt ch x e t x n t n ωωςωωςω++=- (2-11)临界阻尼状态n s ως-==,1是二重根,方程(2-4)的通解为系统对式(2-10)的初始条件的响应为])([)(000t x xx e t x n t n ωω++=- (2-12) 欠阻尼状态1<ς,其中21ςωω-=n d (2-13)初始条件响应)sin cos ()(000t x xt x e t x d dn d t n ωωςωωςω++=- (2-14)参数设定与求解阻尼比ς分别取;应用Matlab 对式(2-11)和(2-12),(2-14)求解。
程序如下:clear,format compact;a=0.5;t=0:0.1:18;;w0=1;k=1;x0=1;wd=w0.*sqrt(1-a*a);x1=wdy=exp(-a*w0.*t).*(x0.*cos(wd.*t)+((x1+a*wd*x0)./wd)*sin(wd.*t)) figure(1),plot(t,y,'r');hold on a=1.0;t=0:0.1:18; w0=1;wd=1;x1=wd;y=exp(-wd.*t).*(x0+(x1+wd*x0).*t); figure(1),plot(t,y,'d');hold ona=2.0;t=0:0.1:18;w0=1;wd=w0*sqrt(a*a-1);y=exp(-a*w0.*t).*(x0.*cosh(wd.*t)+(x1+a*w0*x0)/w0.*sinh(t));figure(1),plot(t,y,'v');hold on 结论:图2-2为Matlab 计算后给出的响应曲线,从中可以得到一些重要的结论:在10<<ς的情况下,阶跃信号输入时,输出信号为衰减振荡,其振荡角频率(阻尼振荡角频率)为d ω,幅值按指数衰减越大,阻尼越大,衰减越快。
1>ς时,振荡系统等同于两个一阶系统串联。
此时虽然不产生振荡,但也需要经过较长时间才能达到稳态。
在一定的ς之下,欠阻尼系统能够更快地达到稳态值;而过阻尼系统反应迟饨,动作缓慢,所以系统通常设计成欠阻尼系统,ς取值为2024681012141618-0.20.20.40.60.811.21.4t(s)x (t )a=1.0a=2.0a=0.5图2-2算例绘制无阻尼单自由度系统的固有频率和周期随静变形的变化曲线。
固有频率n ω和周期n τstn gδω=,gstn δπτ2=取2/81.9s m g =。
可以利用下列MATLAB 程序画出st δ在0~0.5范围内nω和n τ的变换曲线:%Ex2_17.m g=9.81;for i=1:101 t(i)=0.01+(0.5-0.01)*(i-1)/100;w(i)=(g/t(i))^0.5; tao(i)=2*pi*(t(i)/g)^0.5; endplot(t,w);gtext('w_n'); hold on;plot(t,tao);gtext('T_n'); xlabel('delta_s_t'); title('Example2.1');0.050.10.150.20.250.30.350.40.450.505101520253035w nT ndelta stExample2.1单自由度系统的强迫振动简谐激励是激励形式中最简单的一种,虽然它在实际中存在的场合比较少但掌握系统对于简谐激励的响应的规律,是理解系统对周期激励或更一般形式激励的响应基础。
图所示的弹簧质量系统中,质量块上作用有简谐激振力t P t P ωsin )(0= (2-15)其中0P 为激振力幅,ω为激振频率。
以静平衡位置为坐标原点建立图示的坐标系。
从图的受力分析,得到运动微分方程为:t p kx x c xm ωsin 0=++ (2-16) 由常微分方程理论知道,方程(3.2)的通解x 由相应的齐次方程的通解h x 和非齐次方程的任意特解p x 两部分组成,即)()()(t x t x t x p h += (2-17)当欠阻尼时,式中)(t x h 为有阻尼自由振动,它的特点是振动频率为阻尼固有频率,振幅按指数规律衰减,称为瞬态振动或瞬态响应;)(t x p 是一种持续的等幅振动,它是由于简谐激励振力的持续作用而产生的,称之为稳态强迫振动或稳态振动,在间隔充分长时间考虑的振动就是这种稳态振动,而在刚受到外界激励时,系统的响应则是上述两种振动之和。
可见,系统受简谐激励后的响应可以分为两个阶段,一开始的过程称为过渡阶段,经充分长时间后,瞬态响应消失这时进xm P(tkxc ckx mP(t入过渡阶段,经充分长时间后,瞬态响应消失,这是进入稳态阶段。
将方程(2-15)的两端同除以质量m ,并且令22n mc ςω= (2-18) 其中ς为相对阻尼系数,n ω为相应的无阻尼系统的固有频率,则方程(2-15)成为t mp x x xn n ωωςωsin 202=++ (2-19) 上述方程特解可以通过)sin(ϕω-=t B x 或者t B t A x ωωsin cos +=来求得,这里介绍用复数方法求式(2-19)的特解。
先将式(2-19)写为下列的复数形式ti n n e mp x x xωωςω022=++ (2-20) 其中x 是复数设复数形式的特解为t i Be x ω= (2-21)其中B 称为复振幅,其意义是包含有相位的振幅。
将式(2-21)代入(2-20),解得ωςωωωn n i m P B 21220+-=(2-22)记λ为频率比,它定义为nωωλ=(2-23) 则式(2-22)可以写成ϕςλλςλλi i Be e kp i k P B --=+-=+-=222020)2()1(1211(2-24)式中2220)2()1(1ςλλ+-=kp B (2-25)2112λςλϕ-=-tg (2-26) 将式(2-24)代入(2-21),得到复数形式的特解为)(ϕω-=t i Be x (2-27)比较方程(2-17)与(2-18),可知(2-19)中的位移x 是(2-20)中复数x 的虚部,因此(2-25)的虚部就是方程(2-12)的特解,即有)sin(ϕω-=t B x (2-28)其中B 为振幅,ϕ为相位差。
由式(2-26)、2-23)及(2-24)得出稳态强迫振动有如下的基本特点:1)线性系统对简谐激励的稳态响应是频率等同于激励频率而相位滞后与激振力的简谐振动;2)稳态响应的振幅及相位差只取决于系统本身的物理性质和激振的频率及力幅,而与系统本身进入运动的方式无关。
无阻尼系统对简谐激励的稳态响应可以从式(2-26)得出。
当n ωω<时,得到1<λ,0=ϕ,这时t k P x ωλsin 1120-=(2-29) 当n ωω>时,得到1>λ,πϕ=,这时)sin(1120πωλ--=t k P x (2-23)式(2-21)也可以写成(2-22)的形式,这时相位差反映在振幅2011λ-k P 的符号中。
上述结果也可以由直接设t B x ωsin =并代入下列方程而得到:t P kx xm ωsin 0=+ (2-24) 为了具体讨论影响稳定响应的振幅和相位差的各种因素,记kP B 00=(2-25) 0B 实际是质量块在激振力幅静作用下的最大位移。
再引入无量纲的振幅放大因子β,它定义为2220)2()1(1ςλλβ+-==B B (2-26) 由式(2-26)和(2-19)可以分别画出以相对阻尼系数ς为参数的曲线——λβ-曲线与λϕ-曲线,前者称为幅频响应曲线,后者称为相频响应曲线如图所示 程序如下for kesai=[0.05,0.10,0.15,0.25,0.375,0.50,1.0] lamda=0:0.01:5.0;beta=1./(sqrt((1-lamda.^2).^2+(2*kesai*lamda).^2)); plot(lamda,beta) hold on endaxis([0 5 0 3]);00.51 1.522.533.544.550.511.522.53频率比振幅放大因子1.00.50.3750.050.150.25偏心质量引起的强迫振动振幅放大因子2222)2()1(ςλλλ+-=me MB (2-27)程序如下:for kesai=[0.05,0.10,0.15,0.25,0.375,0.50] lamda=0:0.01:5.0;beta=lamda./(sqrt((1-lamda.^2).^2+(2*kesai*lamda).^2)); plot(lamda,beta) hold on endaxis([0 5 0 3]);00.51 1.522.533.544.550.511.522.53频率比M B /m e0.50.100.150.250.3750.501.0支撑运动引起的强迫振动振幅放大因子2222)2()1()2(1ςλλςλβ+-+==a B (2-28) 程序如下:for kesai=[0.05,0.10,0.15,0.25,0.375,0.50,1.0]lamda=0:0.01:5.0;beta=sqrt((1+(2*kesai*lamda).^2)./((1-lamda.^2).^2+(2*kesai*lamda).^2));plot(lamda,beta)hold on endaxis([0 5 0 3]);00.51 1.522.533.544.550.511.522.53频率比振幅放大因子0.050.100.150.250.3750.501.01.141算例利用MATLAB ,绘制弹簧-质量系统在简谐力作用下的响应曲线。