4.1 数字控制器的模拟化设计方法导学
第4章数字控制器的模拟化设计方法

控制器离散化需满足的条件:
1、离散化处理过程中的前提是:模拟控制器稳定,离 散控制器也稳定;
2、离散控制器应该尽量保持模拟控制器的动态性能, 一般指离散控制器的的频率尽量接近模拟控制器的频 率特性。
0 T 2T … (k-1)T kT …
t
图4.8双线性变换与梯形积分
与 S 平面的稳定域对应关系:
S 平面的稳定域为:Re(s)<0
对应Z平面:
Re⎜⎛ 2 ⎝T
z z
− +
1 ⎟⎞ 1⎠
<
0
即 Re⎜⎛ z −1⎟⎞ < 0 ⎝ z +1⎠
令 z = σ + jω
则
Re⎜⎜⎝⎛
σ+ σ
jω − + jω
y(t)
T
y(k)
计算机控制系统
采样频率足够高
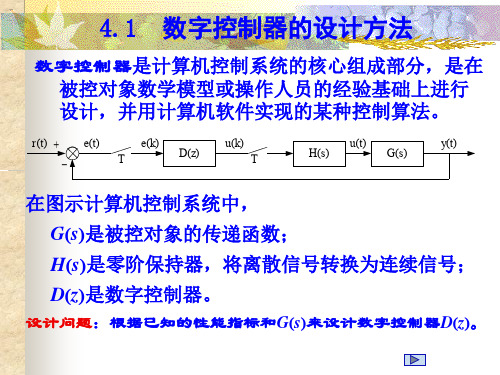
r(t) e(t)
u(t)
D(s)
W (s)
忽略 y (t )
连续控制系统
1
设计思想过程:
连续系统设计方法
离散化处理
连续系统 对象与指标
连续控制器模型 D(s)
离散控制器模型 D(z)
控制器设计思想:
连续系统设计方法
根轨迹法 离散化变换 离散系统
频率特性法
1
⎟⎟⎠⎞
<
0
即
Re⎜⎜⎝⎛
σ σ
+ +
jω jω
− +
11 ⎟⎟⎠⎞
数字控制器的模拟化设计_OK

已知被控对象的传递函数G(s),按照模拟控制器设
计的方法得到数字控制器。
主要存在两个问题:
1.被控对象的传递函数G(s)必须已知;
2.从模拟控制器D(s)到数字控制器D(z)的近似存
在误差。 17
例:已知某系统被控对象的传递函数为 要求设计控制器,使满足性能指标:
积分作用:消除静差,但引入了-90度相角,稳定 性变差,容易引起超调,甚至出现振荡
e(t) t
0 y
t 0
27
比例积分调节器综合了P,I两种调节的优点,利用P调节快速 的减小误差,同时利用I调节消除残差。
控制规律:
u(t)
k
p[e(t)
1 TI
t
e(t) dt]
0
可以利用积分时间Ti来衡量积分作用所占的比重,积分时间 Ti越大,积分作用所占的比重越小,积分作用越弱;积分时 间Ti越小,积分作用所占的比重越大,积分作用越强。
36
—3 数字PID控制器
由于计算机控制是一种采样控制,只能根据采样 时刻的偏差值计算控制量。在计算机控制系统中, PID控制规律的实现必须用数值逼近的方法。
当采样周期相当短时,用求和代替积分、用后向 差分代替微分,使模拟PID离散化变为差分方程。 将模拟的PID控制器近似为数字PID控制器。
数字PID (1)位置型数字PID (2)增量型数字PID
r(t)
+ _
e(t) D(s)
u(t)
G(s)
y(t)
7
已知G(s)来求D(s)的方法有很多种,比如频率特性 法、根轨迹法等。 如果性能指标以单位阶跃响应的峰值时间、调节 时间、超调量、阻尼比、稳态误差等时域特征量 给出时,一般采用根轨迹法校正; 如果性能指标以系统的相角裕度、幅值裕度、谐 振峰值、闭环带宽、静态误差系数等频域特征量 给出时,一般采用频率法校正。
第4.1章 数字控制器连续化设计.ppt
(k 1)T
(k 1)T
y(k 1) y(0) a0 y(t)dt a0 x(t)dt
将以上两式相减得
kT
kT
y(k) y(k 1) a y(t)dt a x(t)dt
(k 1)T
(k 1)T
梯形积分公式
kT y(t)dt y(k) y(k 1)T
z esT 1 sT 得:s z 1
Tz
则有: D( z) D(s) s z1 Tz
从上面离散化方法看出,采样周期与离散化方法对 离散化后的数字调节器D(z)有很大影响,通过实验 比较,总结出以下几个结论: • 前向差分变换法易使系统不稳定,不宜采用; • 后向差分变换法会使D(z)的频率特性发生畸变; • 双线性变换法最好; • 所有离散化方法采样周期的选择必须满足 s 10c
为数字控制器,并分别写出位置型和增量型控制算法。
解:双线性变换公式为: s 2 z 1
T z 1
所以
D(z)
U (z) E(z)
D(s)
s 2 T
z 1 z 1
1 s s 2 z1
T z1
1 2 1 z1
T 1 z1
D(z)
U (z) E(z)
T 2
1 1
T
3)后向差分法
dy(t )
①由微分后向定义 dt
tk
y(k) y(k T
1)
将上式代入(4-1),并对两边z变换得
D(z) y(z)
a
x(z) z 1 a
Tz
则: s z 1
Tz
D(z) D(s) sz1 T
计算机控制系统复习题答案
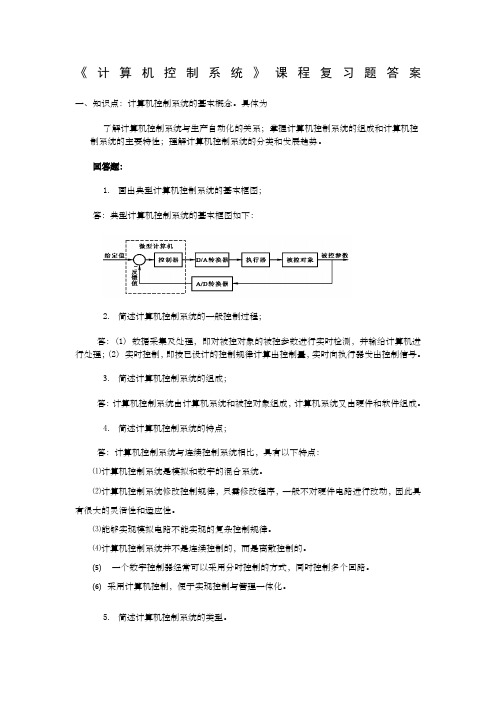
《计算机控制系统》课程复习题答案一、知识点:计算机控制系统的基本概念。
具体为了解计算机控制系统与生产自动化的关系;掌握计算机控制系统的组成和计算机控制系统的主要特性;理解计算机控制系统的分类和发展趋势。
回答题:1.画出典型计算机控制系统的基本框图;答:典型计算机控制系统的基本框图如下:2.简述计算机控制系统的一般控制过程;答:(1) 数据采集及处理,即对被控对象的被控参数进行实时检测,并输给计算机进行处理;(2) 实时控制,即按已设计的控制规律计算出控制量,实时向执行器发出控制信号。
3.简述计算机控制系统的组成;答:计算机控制系统由计算机系统和被控对象组成,计算机系统又由硬件和软件组成。
4.简述计算机控制系统的特点;答:计算机控制系统与连续控制系统相比,具有以下特点:⑴计算机控制系统是模拟和数字的混合系统。
⑵计算机控制系统修改控制规律,只需修改程序,一般不对硬件电路进行改动,因此具有很大的灵活性和适应性。
⑶能够实现模拟电路不能实现的复杂控制规律。
⑷计算机控制系统并不是连续控制的,而是离散控制的。
⑸一个数字控制器经常可以采用分时控制的方式,同时控制多个回路。
⑹采用计算机控制,便于实现控制与管理一体化。
5.简述计算机控制系统的类型。
答:(1)操作指导控制系统;(2)直接数字控制系统;(3)监督计算机控制系统(4)分级计算机控制系统二、知识点:计算机控制系统的硬件基础。
具体为了解计算机控制系统的过程通道与接口;掌握采样和保持电路的原理和典型芯片的应用,掌握输入/输出接口电路:并行接口、串行接口、A/D和D/A的使用方法,能根据控制系统的要求选择控制用计算机系统。
回答题:1.给出多通道复用一个A/D转换器的原理示意图。
2.给出多通道复用一个D/A转换器的原理示意图。
3.例举三种以上典型的三端输出电压固定式集成稳压器。
答:W78系列,如W7805、7812、7824等;W79系列,如W7805、7812、7824等4.使用光电隔离器件时,如何做到器件两侧的电气被彻底隔离?答:光电隔离器件两侧的供电电源必须完全隔离。
五邑大学计算机控制技术第三章 数字控制器的模拟化设计(授课)
•什么是?•数字控制器的模拟化设计•模拟化(连续)控制环节—数字化(计算机)取代•闭环控制系统—数字化PID (计算机)改善动态性能第三章:数字控制器的模拟化设计§3-1 数字PID 控制算法§3-1-1 DDC系统的组成原理第三章:数字控制器的模拟化设计数字控制的优势模拟调节器调节能力有限,无法实现复杂的控制; 数字控制器改变控制参数或控制方式时,只需修改控制程序,控制规律灵活多变;计算机具有分时控制能力,可实现多回路控制;计算机还能完成实时监控、数据采集、数字显示等各种功能。
第三章:数字控制器的模拟化设计•模拟控制环节——离散函数取代•离散函数——计算机算法实现•计算机算法——计算机控制器执行模拟化设计方法中,模拟控制器进行离散化处理的方法有:差分变换法;零阶保持器法;双线性变换法。
模拟化设计方法中,模拟控制器进行离散化处理的方法:差分变换法;1.后向差分一阶导数采用增量表示的近似式为()(1)du u k uk dt T --≈(3―1) 同理,二阶导数采用的近似式为22()()(1)()(1)(1)(2)()2(1)(2)d u t u k u k dt Tu k u k u k u k T TTu k u k u k ''--≈------=--+-=(3―2)§3-2-1 差分变换法2.前向差分一阶导数采用增量表示的近似式为()(1)()du t u k u k dt T+-≈同理,二阶导数采用的近似式为222()(2)2(1)()du t u k u k u k +-++≈§3-2-1 差分变换法§3-2-1 差分变换法实际应用的自动控制系统中,信号f (t )是有始信号,拉普拉斯变换定义为:⎰∞-=0)()(dte tf s F st记为:)]([)(t f s F ξ=F (s )拉普拉斯反变换定义为:)(])(21[)(t u dt e s F j t f j j st ⎰∞-∞-=σσπ记为:)]([)(1s F t f -=ξ时域微分特性)()(s F t f ↔若有:则:)0()()(--↔f s sF dtt df 一般而言,实际应用的自动控制系统有:0)0(=-f 则有:)()(s sF dt t df ↔推论:)()0()0()0()()()1(21s F s f f s f s s F s dtt f d nn n n n n n ↔--'--↔------ 0)0(=-f§3-2-1差分变换法✓推导模拟控制器传递函数D(s),并转换成相应的微分方程;✓根据香农采样定理,选择一个合适的采样周期T;✓将微分方程中的导数用差分替代,微分方程变换为差分方程,再根据差分方程导出迭代运算方程。
数字控制器的设计方法

D1 ( s) H ( s) D( s)
增加采样角频率
s ,使 s
远高于控制器的截止频率。
8
2.带有零阶保持器的Z变换法
在原线性系统的基础上串联一个虚拟的零阶保持器, 再进行Z变换从而得到 D(s) 的离散化模型 D(z)
1 e sT D( z ) Z [ D( s )] s
24
在很多控制系统中,由于执行机构是采用步进电 机或多圈电位器进行控制的,所以,只要给出一个增 量信号即可。
写出K-1的输出值:
1 k 1 e(k 1) e(k 2) u(k 1) k p [e(k 1) e(i)T Td ] u0 Ti i 0 T
上两式相减得PID增量式控制算法
17
3.3
数字PID控制
3.3.1 理想微分PID控制 设系统的误差为e(t),则模拟PID控制规律为
1 u(t ) K p [e(t ) Ti
de(t ) 0 e(t )dt Td dt ]
t
它所对应的连续时间系统传递函数为
U ( s) 1 K p [1 Td s] E( s) Ti s
Ts / 2
e
Ts / 2
(Ts / 2)2 (Ts / 2)3 1 Ts / 2 ... 1 Ts / 2 2! 3!
同理:
e
Ts / 2
1 Ts / 2
1 Ts / 2 得双线性变换公式 : z 1 Ts / 2
15
双线性变换公式可以进行实s传递函数与z传递函数相互 转换,转换公式如下:
2
2.离散化设计方法 首先用适当的离散化方法将连续部分(如图所 示的保持器和被控对象)离散化,使整个系统完全 变成离散系统,然后用离散控制系统的设计方法来 设计数字控制器,最后用计算机实现控制功能。
第四章+数字控制器的模拟化设计
第3章 数字控制器的模拟化设计技术
r(t)
+
e(t) -
PID增量算法
u
步进电机
u
被控对象
y(t)
图6―4 数字PID增量式控制示意图
第3章 数字控制器的模拟化设计技术
在按式(6―14)编写增量式PID控制算法程序时,可
以根据预先确定的KP、KI、KD的值,计算出q0、q1、q2 的值,并将其存入内存中固定的存储单元,并且设置初
始值e(k)=e(k-1)=e(k-2)=0。增量式PID控制算法程序框
图如图6―5所示。 利用增量型PID控制算法,也可以得出位置型PID控 制算法,即 u(k)=u(k-1)+Δu(k)
第3章 数字控制器的模拟化设计技术
6.2.1 模拟PID控制器
所谓PID控制,就是比例(Proportional)、积分 (Integral)和微分(Differential)控制,它的结构简单,参 数易于调整,是控制系统中经常采用的控制算法。在 模拟控制系统中,PID控制算法的控制结构如图6―2所 示,其表达式为
1 u ( t ) K p [ e( t ) TI
l
0
de(t ) e(t )dt TD ] dt
(6―5)
第3章 数字控制器的模拟化设计技术
式中,u(t)为控制器输出的控制量;e(t)为偏差信 号,它等于给定量与输出量之差;KP为比例系数;TI 为积分时间常数;TD为微分时间常数。
U ( s) 解由 D( s) ,有 E ( s)
s(T1s 1)U ( s) KE ( s) T1s U ( s) sU ( s) KE ( s)
第四章 数字控制器的模拟设计法综述
对 d (t ) 采样,有
d s (kT ) Ai e ai kT
i 1 n
计算机控制系统
第四章 计算机控制系统的模拟化设计
按等效的要求,与 D( s) 对应的 D( z ) 为 n a kT k D( z ) Z[d (kT )] Z[d s (kT )] Ai e z k 0 i 1 n Ai aiT 1 z i 1 1 e 式中:Ai、 a i 为连续环节 D( s) 的参数。
计算机控制系统
第四章 计算机控制系统的模拟化设计
4.1.2 传递函数与Z传递函数的相互转换
冲激响应不变法 Z变换法 转换方法 阶跃不变法 零阶保持器法
零极点点匹配映射法
后向差分法
差分法
前向差分法 双线性变换法 预防频率失真的双线性变换法
计算机控制系统
第四章 计算机控制系统的模拟化设计
从信号理论角度看,模拟控制器就是模拟信号滤波 器应用于反馈控制系统作为校正装置。模拟控制器离 散化成的数字控制器,也可以认为是数字滤波器。 离散后的数字控制器与等效前的连续控制器应具 有 近似相同的动态特性和频率响应特性,这是不容易实 现的。采用某种离散化技术可能达到相同或几乎相同 的脉冲响应特性,但不能具有较好的频率响应逼真 度,反之亦然。 对于大多数情况,要匹配等效前后的频率响应特 性 是很困难的。离散后数字控制器的动态特性取决于采
计算机控制系统
第四章 计算机控制系统的模拟化设计
4.2.2 阶跃不变法 基本思想:数字控制器的Z传递函数D(z)的单位阶跃
响应序列u(kT)等于连续传递函数D(s)的单位阶约响应
u(t)的采样值 us (kT ) 。即,若
u(kT ) us (kT )
最新东北大学自动化复习精品课件10数字控制器的模拟化设计方法
被控对象
R(s) +
E(s)
-
E*(s)
T
T——采样周期
D(z)
Wh0(s)
W(s)
Y(s)
E*(s)——误差信号E(s)的采样信号
~ D( s) Z 1[ D( z )]
等效计算机控制系统的开环输出为:
~ Y ( s ) D( s )Wh 0 ( s )W ( s ) E * ( s )
需要熟悉的基础知识: 模拟系统控制器设计的基本方法(频率设 计法、根轨迹设计法) 控制系统的性能指标 需要掌握的基础知识:
z变换与z反变换
s平面与z平面的频率特性分析方法 控制系统的稳定性分析方法
1.2 本教学模块中控制器的设计策略
设计思想:
采用经典的连续系统控制器设计理论进行数字控 制器的设计,达到控制器设计过程简单实用、便于掌 握的目的。
s ——采样频率 1 ~ D( s )Wh 0 ( s )W ( s ) E ( s jn s ) T n
采样开关和零阶保持器的影响
~ Y ( s ) D( s )Wh 0 ( s )W ( s ) E * ( s ) 1 ~ D( s )Wh 0 ( s )W ( s ) E ( s jn s ) T n ~ E (s jn ) E (s) D( s ) D ( s )
Ts e Ts 等效开环传递函数: Wk 0 ( s) D( s)W * ( s) e 2 D( s)W ( s) 连续系统的开环传递函数为: WK ( s) D( s)W ( s)
结论:零阶保持器和采样开关的影响大体相当于系统中附 加了一个T/2的延时环节。因此,模拟化设计方法只适用于 采样周期较小的情况。
数字控制器的模拟化设计
用离散的差分方程代替连续系统的微分方程。
连续的时间离散化,即 t=KT (K=0,1,2,…n)
积分用累加求和近似得
t
K
K
e(t)dt e( j)T T e( j)
0
j0
j0
微分用一阶后向差分近似得
de(t) e(k ) e(k 1)
dt
T
(3—14) (3—15)
必须与模拟调节器的阶跃响应的采样值相等。
D(
z
)
1
1 z
1
Z
D(s)
1 s
D(
z)
(1
z
1
)Z
D(s) s
D(z)
Z
1
e s
Ts
D(s)
ZH (s)D(s)
(3—7)
其中 H(s)称为零阶保持器,T为采样周期。 零阶保持器法的物理解释如教材P89图3—4所示。
代入式(3—1)和(3—2)得
最后得到
T1
u(k)
2u(k -1) T2
u(k
-
2)
u(k)
u(k T
1)
Ke(k )
u(k) T 2T1 u(k 1) T1 u(k 2) T 2k e(k)
T T1
T T1
T T1
数字控制器的模拟化设计
二.零阶保持器法(阶跃响应不变法) 基本思想:离散近似后的数字控制器的阶跃响应序列,
DATA ENDS
;数据段结束
数字控制器的模拟化设计
CODE SEGMENT
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
离散模拟信号(时间散上离散,幅值上连续) : y*(t)——被控量信号。
数字控制系统的简化结构
计算机
r(k) e(k) 数 字 控 u(k)
+-
制器
y(k)
u(t) D/A
采样开关
执行 机构
被 控 y(t) 对象
1.1 学习本教学模块所需掌握的基础知识
需要熟悉的基础知识:
模拟系统控制器设计的基本方法(频率设计法、根 轨迹设计法) 控制系统的性能指标
需要掌握的基础知识:
z变换与z反变换 s平面与z平面的频率特性分析方法 控制系统的稳定性分析方法
1.2 本教学模块中控制器的设计策略
设计思想:
采用经典的连续系统控制器设计理论进行数字控 制器的设计,达到控制器设计过程简单实用、便于掌 握的目的。
计算机控制系统
教学模块4 数字控制器 的模拟化设计方法
本教学模块内容:
教学单元1-模块导学 教学单元2-连续控制器的离散化方法 教学单元3-数字PID控制器 教学单元4-Smith预估控制
教学模块4 数字控制器的模拟化设计方法
教学单元1 模块导学
东北大学·刘建昌
liujianchang@
直接设计方法包括:根轨迹设计法、频率响应设计法、解析 设计法(最小拍……)
模拟化设计方法
忽略
r(k)
e(k)
_
D(z)
u(k)
Wh0(s) u(t) W(s) y(t)
y(k)
T——采样周期
T
计算机控制系统
r(t) e(t) D(s)
_
y(t)
采样频率足够高
u(t)
W(s)
忽略
y(t)
离散化处理
典型计算机控制系统的基本结构
计算机
r(k) e(k) 数 字 控 u(k)
+-
制器
y(k)
u(t) D/A
采样开关
执行 机构
被 控 y(t) 对象
y*(t) A/D
y(t)
测量
变送
数字信号(时间上离散、幅值上量化):r(k)——给定输入,y(k)——系统 输出,e(k)= r(k)- y(k)——偏差信号,u(k)——控制信号;
e
Ts
2W
(s)
开并取前2项
Ts e 2
等效开环传递函数:
Wk
0
(s)
D(
s)W
*
(s)
Ts
e2
D(
s)W
(s)
连续系统的开环传递函数为: W K ( s ) D ( s )W ( s )
结论:零阶保持器和采样开关的影响大体相当于系统中附
加了一个T/2的延时环节。因此,模拟化设计方法只适用于
采样周期较小的情况。
1.4 本教学模块的体系设计
(1)数字控制器模拟化设计方法的核心问题是连续控制 器的离散化,这也是本模块的重点,所以在教学单元2中 介绍了连续控制器的离散化方法。
(2)两种典型的控制器及其工程化改进:对典型连续控 制器进行离散化处理,得到典型控制器的离散形式(数字 控制器):
PID控制器—常用的经典控制器(教学单元3)
y*(t) A/D
y(t)
测量
变送
A/D和D/A的转换精度足够高,检测装置响应足够快
r(k)
e(k)
_
D(z)
u(k)
Wh0(s) u(t) W(s) y(t)
y(k)
T——采样周期
T
D(z)—— 离 散 部 分 的 数 字 控 制 器 ; Wh0(s)—— 零 阶 保 持 器 ; W(s)——连续部分的被控对象。
离散化直接设计方法(直接设计方法)
广义被控对象模型
Wd (z)
r(k)
e(k)
_
D(z) u(k)
Wh0(s) u(t) W(s) y(t)
y(k)
T——采样周期
T
——把连续部分离散化,把整个系统变成离散化系统,直接 设计数字控制器D(z)——Wd(z)已知,根据系统性能指标要求 [比如最小拍]确定整个系统的闭环脉冲传递函数WB(z),确定 数字控制器D(z) 。
此即为模拟化设计方法。
设计路线
连续系统 对象与指标
离散化处理(保证系 统的稳定性,使数字 控制器与模拟控制器 在频率响应上相似)
连续控制器 D(s)
离散控制器 D(z)
连续系统设计方 法(根轨迹法、 频率特性法)
数字控制算法 u(k)
核心问题是什么?——连续控制器的离散化
1.3 模拟化设计方法原理分析
等效计算机控制系统的开环输出为:
Y (s) D~(s)Wh0 (s)W (s)E*(s)
D~(
s)Wh0
(
s)W
(
s)
1 T
E(s
n
jns )
s
——采样频率
采样开关和零阶保持器的影响
Y (s) D~(s)Wh0 (s)W (s)E*(s)
D~(s)Wh0 (s)W
(s) 1 T
E(s
n
jns )
D(s) D~(s)
E(s jns ) E(s)
n
采样周期T很小
零阶保持器具有低 通滤波器特性
Y
(s)
1 T
D(s)Wh0 (s)W
(s)E(s)
计算机控制系统的等效开环传递函数:
考虑了零阶保持器 和采样开关的被控 对象广义模型
连续控制系统
D(z)
模拟化设计方法中忽略因素的影响分析
采样开关和零阶保持器的影响
计算机控制系统的典型结构也可以表示为:
R(s) +-
控制器
E(s) E*(s) D(z) T
零阶保持器
Wh0(s)
被控对象
W(s) Y(s)
T——采样周期 E*(s)——误差信号E(s)的采样信号
D~(s) Z 1[D(z)]
Smith预估控制—解决大滞后问题的经典控制器(教 学单元4)
·教学单元一结束·
Wk0 (s)
Y (s) E(s)
1 T
D(s)Wh0 (s)W
(s)
D(s)W
*(s)
被控对象广义模型
W
*
(s)
1 T
Wh0
(s)W
(s)
1
eTs Ts
W
(s)
Ts
Ts
e2 e 2
Ts
Ts e 2
W
(s)
泰勒级数展
(1Biblioteka Ts 2)
(1
Ts
Ts 2
) W
(s)