无刷直流电动机调速的实现
直流无刷电机实验

直流无刷电机实验一.实验目的1.了解直流无刷电机的运行原理2.掌握直流无刷电机的DSP控制。
二.实验内容1.实现无刷直流电机的正反转控制2.实现无刷的速度调节3.实现无刷直流电机电流环和速度环双环闭环控制三.原理简介1.直流无刷电机的原理无刷直流电动机的结构原理图如图2-1所示:图1 直流无刷电动机的结构原理图无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中相应的功率开关器件联接,在图1中A相、B相、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联接[2]。
定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。
其原理框图如图2所示。
图2 直流无刷电动机的原理框图2. 直流无刷电机的控制直流无刷电机的控制基本上类似于直流有刷电机的控制(PWM 调制),但由于无刷直流电机用电子换向器取代了机械电刷,所以无刷直流电机除了在控制各相电枢电流的同时还用对电子换向器进行控制。
在无刷直流电机的运行过程中,霍尔位置传感器不断检测电机当前位置,控制器根据当前位置信息来判断下一个电子换向器的导通时序。
如图3所示H1H3ANCBNCBNA CNAH2CNBANB AZXCyWBuV旋转方向反向图1 电子换向器的工作原理图中H1、H2和H3分别表示霍尔位置传感器的信号,H1的有效期为X 轴到u 轴的正半周,H2的有效器为V轴到y轴的正半周,H3的有效期为W轴到z轴的正半周,有效是霍尔对应的信号为1。
无刷直流电机pwm调速原理

无刷直流电机pwm调速原理
无刷直流电机(BLDC)是一种电动机,其转子上没有传统的电刷。
相比传统的有刷直流电机,BLDC电机拥有更高的效率和可靠性。
为了实现BLDC电机的调速,通常使用PWM(脉宽调制)技术。
PWM调速原理如下:在电机电源上加上一个有特定占空比的方波信号,即PWM信号。
PWM信号的占空比决定了电机的平均电压,从而决定了电机的转速。
当PWM信号的占空比增加时,电机的平均电压也会增加,电机的转速也会随之增加。
反之,当PWM信号的占空比减小时,电机的平均电压也会减小,电机的转速也会减小。
BLDC电机的控制主要包括两个方面:判断当前转子位置和根据位置控制电机。
判断转子位置通常采用霍尔传感器或反电动势感应法。
在控制电机时,可以采用开环控制或闭环控制。
开环控制指直接根据PWM信号控制电机转速;闭环控制则需要通过传感器反馈来调整PWM信号的占空比,使电机达到预期转速。
PWM调速技术不仅可以用于BLDC电机,也可以用于其他类型的电机调速。
通过合理的PWM信号设置,可以实现电机的精确调速和控制。
- 1 -。
无刷直流电动机的转矩调速

摘要无刷直流电机是以电子换相来代替机械换相的直流电机,它保持了直流电机的优良特性,具有较好的启动和调速性能,而且它无需机械换向器,结构简单,可以从根本上克服有刷直流电机易于产生火花的弊病,因此在航天、机器人、数控机床、以及医疗器械、仪器仪表、家用电器等方面得到广泛应用。
但是,无刷直流电机运行中存在的转矩脉动问题对实现精确的位置控制和高性能的速度控制存在较大影响。
本文重点研究电机转矩调速技术及其MATLAB 仿真。
文章首先介绍了无刷直流电机的工作原理、导通方式,并通过对数学模型的分析建立了无刷直流电机的MATLAB的PID调速系统模型并调用S-函数进行了仿真,验证了模型的可行性。
关键词:无刷直流电机;转矩调速;MATLAB;PID;S-函数ABSTRACTBrushless DC motor based on electronic commutation instead of mechanical commutation of DC motor, it maintained the excellent characteristics of DC motor, and has a good performance of starting and rotate-speed adjustment, and it need not mechanical commutation, the structure is simple, can fundamentally overcome a brushed DC motor prone to spark the evils, so in space, the robot, NC machine tools, and medical equipment, instruments and meters, household appliances, etc widely used.But, brushless DC motor problems in the operation of the torque ripple of to achieve precise position control and high-performance speed control exist great influence. This paper mainly studies the brushless DC motor(BLDCM) torque speed controlling technology and its MATLAB simulation.This article first of brushless DC motor working principle, conduction mode of mathematical model, and then through the analysis of brushless DC motor established the MATLAB PID speed regulation system model and simulation, which validated the feasibility of the model.Keywords brushless DC motor(BLDCM);rotate-speed; torque speed-controlling; MATLAB; PID;S-function目录1 绪论 (1)1.1 无刷直流电机技术的发展及现状 (1)1.2 无刷直流电机的技术问题及其解决技术 (3)1.3 论文研究的主要问题 (5)2 无刷直流电机的构成及基本工作原理 (6)2.1 无刷直流电机电路的基本组成环节 (6)2.2 无刷直流电机的导通方式及基本工作原理 (7)2.3 本章小结 (10)3 无刷直流电机的数学模型 (11)3.1 无刷直流电机的数学模型及其基本关系式 (11)3.2 本章小结 (14)4 无刷直流电机的仿真模型及其验证 (15)4.1 仿真软件介绍 (15)4.2 S-函数简介及使用 (16)4.3 仿真建模及实现 (19)4.4 仿真验证及结果记录 (27)4.5 仿真结果分析 (27)4.6 本章小结 (28)结束语 (29)致谢 (30)参考文献 (31)附录 (32)1绪论1.1 无刷直流电机技术的发展及现状1.1.1无刷直流电机的发展及分类无刷直流电机已有四十余年的发展历史,最初是相对于具有机械电刷的传统的直流电机而言的。
永磁无刷直流电机调速控制系统的设计研究
Internal Combustion Engine &Parts0引言随着人类工业社会的迅速发展,能源危机是21世纪各个国家所面临的重大危机,也是要实现可持续发展所必须解决的难题。
永磁无刷直流电机的发展历史可以追溯到上世纪四十年代,直到八十年代初期,在钕铁硼稀土这一永磁材料的突破性研究取得了巨大成果,并且加上生产力迅速提升,制造投入减小的影响,永磁无刷直流电机行业迎来了蓬勃发展。
近三十年来,随着科学研究的深入,永磁体性能得到了跃进式的提升,相应的电力电子器件的完善和蓬勃发展也促进了这一行业的迅猛发展。
永磁无刷直流电机控制系统研究方向与现代电力电子技术、现代控制理论、电机集成技术和微机技术等学科密切相关,相辅相成。
科学家们通过对其研究背景、研究意义、结构组成、工作原理、数学模型、硬件电路设计、软件设计等方面的深入研究,使得永磁无刷直流电机在拥有良好调速性能的情况下,机械换向和电刷等历史研究中出现的难点获得了解决,目前永磁无刷直流电机的用途遍布各行各业,小到家用电器,大到航空航天,都有永磁无刷直流电机的身影,发展前景不可估量。
1研究背景与意义从上世纪四十年代至今,永磁无刷直流电机的发展在实际应用上与永磁材料的突破性研究,生产力迅速提升,制造投入减小,电力电子器件的迅猛发展息息相关,在理论研究上与现代电力电子技术、现代控制理论、电机集成技术和微机技术等学科的深入研究息息相关。
由于其所具有的大功率、大转矩、高速度、高性能、微型化和数字化等特点决定了该行业宽广的发展前景,也吸引了不少科研工作者的目光。
目前永磁无刷直流电机在各行各业都得到广泛的应用,小到家用电器,大到航空航天,都有永磁无刷直流电机的身影。
基于上述原因,对永磁无刷直流电机的控制系统进行合理的、科学的、系统的研究探索是非常重要且必要的,这是现代工业发展和机电一体化所提出来的必须进行的挑战,这一研究具有深远的理论意义和实际应用价值,并且会给整个社会和相关行业带来巨大的经济效益。
PWM调速原理
PWM调速原理
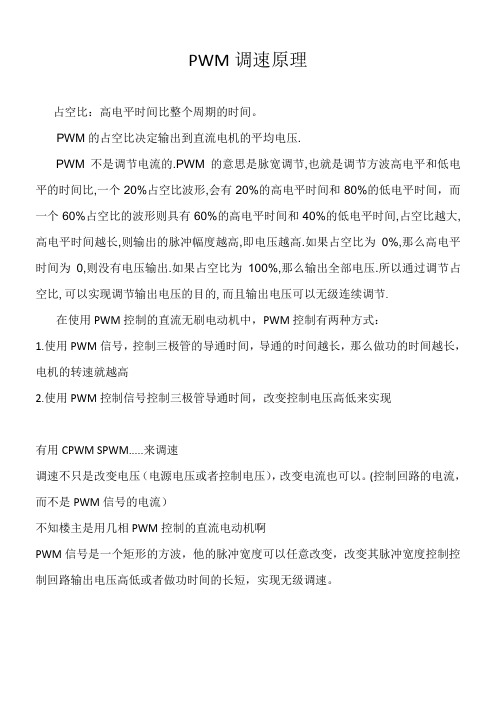
占空比:高电平时间比整个周期的时间。
PWM的占空比决定输出到直流电机的平均电压.
PWM不是调节电流的.PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间,而一个60%占空比的波形则具有60%的高电平时间和40%的低电平时间,占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高.如果占空比为0%,那么高电平时间为0,则没有电压输出.如果占空比为100%,那么输出全部电压.所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节.
在使用PWM控制的直流无刷电动机中,PWM控制有两种方式:
1.使用PWM信号,控制三极管的导通时间,导通的时间越长,那么做功的时间越长,电机的转速就越高
2.使用PWM控制信号控制三极管导通时间,改变控制电压高低来实现
有用CPWM SPWM.....来调速
调速不只是改变电压(电源电压或者控制电压),改变电流也可以。
(控制回路的电流,而不是PWM信号的电流)
不知楼主是用几相PWM控制的直流电动机啊
PWM信号是一个矩形的方波,他的脉冲宽度可以任意改变,改变其脉冲宽度控制控制回路输出电压高低或者做功时间的长短,实现无级调速。
PLC微机控制直流无刷电动机调速系统

一、概述电动机主要类型有同步电动机、异步电动机和直流电动机三种,而直流电动机具有运行效率高和调素性能好等诸多优点得以被广泛运用,但传统的直流电动机均采用电刷,以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火花、无线电干扰以及寿命短等致命弱点,再加上成本高及维修困难等缺点,大大限制了它的应用范围。
随着社会生产力和科学技术的发展,大功率开关器件、模拟和数字集成、高性能磁性材料技术等取得了很大的进步,又因直流无刷电动机具有寿命长、结构简单、运行可靠、维护方便等特点,在性能上,有启动转矩大、动态制动简便、转速——转矩特性呈线性及效率等优点而得以广泛应用。
(一)直流无刷电动机的基本组成环节及工作原理1、直流无刷电动机的基本组成环节直流无刷电动机的基本组成框图如图1-1所示。
它主要由电动机本体、位置传感器和电子开关线路三部分组成。
图1—1 直流无刷电动机的结构原理图电动机本体在结构上与永磁同步电动机相似,但没有笼形绕组和其它启动装置,它有永磁的转子和多相定子绕组。
多相定子绕组分别与电子开关线路中相应的功率开关器件联接。
位置传感器的跟踪转子与电动机转轴相联接,其信号在转子位置译码器中转换成正确的换相顺序信号,控制功率开关器件,使定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
因此,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位置传感器三者组成的“电动机系统”。
其中转子的永磁钢与永磁有刷电动机中所用的永磁钢的作用相似,均是在电动机的气隙中建立足够的磁场,其不同之处在于直流无刷电动机中永磁钢装在转子上,而直流有刷电动机的磁钢装在定子上。
直流无刷电动机的电子开关线路是用来控制动机定子上各相绕组通电的顺序和时间主要由功率逻辑开关单元和位置传感器信号处理单元两个部分组成。
功率逻辑开关单元是控制电路的核心,其功能是将电源的功率以一定的逻辑关系分配给流无刷电动机定子上各相绕组,以便电动机产生持续不断的转矩。
(完整word版)直流无刷电机实验
电气工程及其自动化专业实验实验名称:直流无刷电机实验实验报告书科目:特种电机及其控制专业:电气工程及其自动化班级:05111001学号:0511100110姓名:陈祥杰重庆邮电大学移通学院2013年6月直流无刷电机实验一.实验目的1.了解直流无刷电机的运行原理2.掌握直流无刷电机的DSP控制。
二.实验内容1.实现无刷直流电机的正反转控制2.实现无刷的速度调节3.实现无刷直流电机电流环和速度环双环闭环控制三.原理简介1.直流无刷电机的原理无刷直流电动机的结构原理图如图2-1所示:图1 直流无刷电动机的结构原理图无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中相应的功率开关器件联接,在图1中A相、B相、C 相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联接[2]。
定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。
其原理框图如图2所示。
图2 直流无刷电动机的原理框图2. 直流无刷电机的控制直流无刷电机的控制基本上类似于直流有刷电机的控制(PWM 调制),但由于无刷直流电机用电子换向器取代了机械电刷,所以无刷直流电机除了在控制各相电枢电流的同时还用对电子换向器进行控制。
跑步机电机调速原理
跑步机电机调速原理1. 引言跑步机是一种常见的室内运动设备,用于模拟户外跑步的运动方式。
跑步机通常配备有电机,可以根据用户的需求调整速度。
本文将详细介绍与跑步机电机调速原理相关的基本原理。
2. 跑步机电机调速系统结构跑步机电机调速系统通常由以下几个主要部分组成:•电源:为整个系统提供电能;•控制器:接收用户输入的指令并控制电机的转速;•传感器:用于检测用户的运动状态和环境条件,如心率传感器、倾斜度传感器等;•电机:提供动力驱动跑步带转动。
下图为一个典型的跑步机电机调速系统示意图:3. 跑步机电机调速原理3.1 直流无刷电动机大多数跑步机使用直流无刷电动机作为驱动装置。
直流无刷电动机由转子和定子两部分组成,其中转子通过轴承与驱动轮连接,定子则包含多个线圈。
电机的转速由定子线圈中施加的电流大小和方向来控制。
3.2 PWM调速技术跑步机电机通常使用脉宽调制(PWM)技术来实现调速。
PWM是一种通过改变信号的占空比来控制平均功率输出的方法。
在跑步机电机调速系统中,PWM技术可以通过改变电机输入的脉冲宽度来控制电机转速。
PWM调速技术的原理如下:1.控制器接收用户输入的指令,例如设置跑步机的目标速度。
2.控制器根据目标速度计算出对应的脉冲宽度。
3.控制器通过与驱动装置连接的接口将脉冲信号发送给电机。
4.电机根据接收到的脉冲信号,控制定子线圈中施加的电流大小和方向。
5.根据定子线圈中施加的电流大小和方向,电机转子开始旋转,并带动驱动轮带动跑步带运动。
3.3 闭环控制系统为了更好地实现精确调速,跑步机通常采用闭环控制系统。
闭环控制系统通过不断测量反馈信号来校正输出信号,以达到期望的控制效果。
在跑步机电机调速系统中,闭环控制系统的工作原理如下:1.传感器检测用户的运动状态和环境条件,并将相关信息转化为电信号。
2.传感器将电信号发送给控制器。
3.控制器根据接收到的反馈信号与用户设定的目标速度进行比较,并计算出误差。
直流无刷电动机及其调速控制
直流无刷电动机及其调速控制1.直流无刷电动机的发展概况与应用有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。
但是,有机械接触电刷-换向器一直是电流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的使用。
为了取代有刷直流电动机的机械换向装置,人们进行了长期的探索。
早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。
1955年美国的等首次申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,标志着现代无刷直流电动机的诞生。
无刷直流电动机的发展在很大程度上取决于电力电子技术的进步,在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时间内,性能都不理想,只能停留在实验室阶段,无法推广使用。
1970年以后,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT等)相继问世,加之高磁能积永磁材料(如SmCo、NsFeB)陆续出现,这些均为无刷直流电动机广泛应用奠定了坚实的基础。
在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了 MAC无刷直流电动机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流系统的热潮,这业标志着无刷直流电动机走向实用阶段。
随着现代永磁材料和相关电子元器件的性能不断提高,价格不断下降,无刷电动机的到了快速发展,并被广泛应用于各个领域,例如,在数控机床、工业机器人以及医疗器械、仪器仪表、化工、轻纺机械和家用电器等小功率场合,计算机的硬盘驱动和软盘驱动器器中的主轴电动机、录像机中的伺服电动机等。
2.直流无刷电动机的基本结构和工作原理直流无刷电动机的结构直流无刷电动机的结构示意图如图2-1所示。
基于单片机的无刷直流电动机脉宽调速系统_孙艳霞
图 5 PI 调节算 法 Fig 5 PI adjustment algorithm
PI 调节器的脉冲3; K I
1 S
式中: K p KI T
Kp+
KI 2
T
Z+ 1 Z- 1
( 1)
孙艳霞
( 大连交通大学 电气信息学院, 辽宁 大连 116028)
摘 要: 针对以往无刷直流电动机多由单片机附 加许多种接 口设备构 成, 难于 实现从位 置环到 速
度、电流环的全数字控制问题, 设计 了采用 SP CE061A 型 16 位单片 机的 脉宽调 速系 统. 该单片 机
主要完成 位置传感器信号的采集、电动机 换相信 号的输 出、电 动机转 速的测 量以及 数字 PWM 调
无刷直流电动机的单片机脉宽调速是伴随着 数字控制技术发展起来的. 系统采用台湾凌阳公 司推出的 16 位单片机 SPCE061A 对其进行有效 控制.
无刷直流电动机的换相原理如图 2 所示, 定 子端盖内对称装有 3 个霍尔集成片作为转子传感 器, 随着转子永磁体的转动, 作用于位置传感器的 磁场方向 N- S 极交替变换, 使位置传感器产生相 差 120 的 H 1、H 2、H 3 方波, 有效的 6 个转态编码 信号: 101、100、110、010、011、001, 每一瞬间 有 2 个功率管导通, 每个功率管连续导通 120 电角度, 每隔 60 电角度定子绕组电流换相一次, 编码信号 发生变化的时刻也是定子绕组电流将要发生换相 的时刻.
本系统采用的是三相星型联结, 驱动主回路采 用二二导通方式, 共有 6 种导通状态, 转子每转过 60 电角度变换一种状态. 导通状态的转换通过软 件来完成, 即根据位置传感器的输出信号 H 1、H 2、 H 3, 不断地取相应的控制字送 IOB 口来实现.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷直流电动机调速的实现郭宇飞1, 姚 猛2(1.中国电子科技集团公司第41研究所,安徽蚌埠 233006;2.安徽中烟工业公司蚌埠卷烟厂,安徽蚌埠 233006)摘 要:通过描述脉宽调制(P WM)的原理和U C3637的应用,介绍了一种无刷直流电动机调速的方法。
经验证,该方法控制效果良好。
关键词:无刷直流电机;脉宽调制;调速中图分类号:TM33 文献标识码:A 文章编号:1673-6540(2009)09-0013-04I mp l e m enti ng of B rushless DC M otor Speed R egulationGUO Yu-fei1, Y AO M eng2(1.The41st I nstit u te of Ch i n a E lectr onics Techno l o gy Group Corporati o n,B anbu233006,China;2.Banbu C i g arette Factory,AnhuiTobacco I ndustry Co.,Banbu233006,Ch i n a)Abstrac t:By descr i bing the princ i p l e of pu l se w idt h m odulation and the app licati on o f U C3637,a me t hod o f brush l ess DC m otor driv i ng i s i ntroduced.K ey word s:brush less DC mo tor;pu lse w id th m odu lati on(P WM);speed regulation0 引 言无刷直流电动机工作在由位置检测器控制逆变器开关通断的 自控式 工作方式下,逆变器的换相通过与电动机同轴的旋转变压器检测转子转角而完成。
要控制电动机的转速就要调节逆变器输入端的直流侧电压。
在众多调节直流电压的方法中,选用了脉宽调制(P WM)方式,其优越性在于:(1)主电路线路简单,需要的功率元件少;(2)开关频率高,电流容易连续,谐波少,电机损耗和发热较小;(3)低速性能好,稳速精度高,调速范围宽;(4)系统频带宽,快速响应性能好,动态抗扰能力强;(5)主电路元件工作在开关状态,导通损耗小,装置效率较高;(6)直流电源采用不控三相整流时,电网功率因数高。
下文对P WM 原理和实现方法予以说明。
1 P WM原理简介图1绘出了无刷直流电动机P WM的电路原理图。
无刷直流电动机使用二相导通星形三相六状态的工作模式。
每个状态下只有二相绕组在工作,而对电机转速的调节正是通过调节这二相绕组两端输入直流电压的大小而实现的,其调节方法类似于有刷直流电动机的双极式P WM方式。
现假设无刷直流电动机工作于A、B二相绕组, Q1、Q3、Q4、Q6四个电力场效应管的门极驱动电压分为两组。
Q1和Q6同时导通和关断,其驱动电压U g1=U g6;Q3和Q4同时动作,其驱动电压(U g3 =U g4=-U g1)波形如图2(a)所示。
图1 无刷直流电动机P WM电路在一个开关周期内,当0 t t on时,U g1和U g6为1,场效应管Q1和Q6导通;而U g3和U g4为0,Q3和Q4关断。
这时,+U s加在AB两端,U A B=U s,电枢电流流向为+U s Q1 A相绕组 B相绕组13Q 6 -U s 。
当t on t T 时,U g1和U g6为0,Q 1和Q 6关断;U g3和U g4为1,Q 3和Q 4导通,在电枢电感释放储能的情况下,电枢电流流向为-U s Q 4 A 相绕组 B 相绕组 Q 3 +U s 。
此时,U A B =-U s 。
U AB 在一个周期内正负相间,这是双极式P WM 逆变器的特征,U A B 端电压如图2(b)所示。
U AB 端电压的平均值为: U AB =t on T U s -T -t onTU s =2t onT-1Us (1)(a)门极驱动电压(b)AB 端电压图2 电压波形以 =U A B /U s 来定义P WM 电压占空比,则=2t on /T -1。
调速时, 的变化范围为-1 1。
当 为正值时,U AB 为正,电动机正转,且随着 的增大,U AB 变大,转速增加; 为负值时,U A B 为负,电动机反转,且随着 的减小,U A B 绝对值变大,转速增加; =0时,电动机停止。
在 =0时,虽然电动机不动,但电枢两端的瞬时电压和瞬时电流均不为零,而是交变的。
这个交变电流平均值为零,不产生平均转矩,但增大电机的损耗。
其好处是使电动机带有高频微振,起着所谓的 动力润滑 作用,消除正、反向时的静摩擦死区。
2 P WM 的实现采用UC3637双P WM 输出调制芯片作为实现的手段。
UC3637是一种设计用于需要双向驱动电路的P WM 型电机驱动的P WM 单片电路。
作为常规驱动控制芯片的替换,这种电路能增加效率并减少元器件成本。
速度误差调制信号送入该集成电路后,形成两路互补型双向脉宽输出,这两路输出信号与误差调制信号的幅值成正比,且与极性相关,因此可构成双向的调速系统。
2.1 UC3637的原理框图及其在系统中的接线UC3637的原理框图如图3所示,其应用电路如图4所示。
图3 UC3637的原理框图2.2 原理分析2.2.1 载波的形成如图4所示,在正电源+V s 和负电源-V s 之间串联电阻R 1、R 2、R 3,两分压点分别接+V th (1脚)和-V th (3脚),作为形成载波的阈值电压。
设计R 1=R 2=R 3,故两阈值电压分别为:+V th =V s -R 1R 1+R 2+R 3[V s -(-V s )]=14V s-R1R1+R1+R12V s=13V s(2)图4 UC3637应用电路-V th=-V s+R3R1+R2+R3[V s-(-V s)]=-V s+R3R3+R3+R32V s=-13V s(3)18脚接电阻R T,如图4所示,阈值电压+V th通过内部缓冲电路与R T作用设置电容充放电的恒流,且其值为:I s=+V th-(-V s)R T=13V s-(-V s)R T=43V sR T(4)2脚接电容C t,通过其线性充放电产生了三角载波,具体过程为:联合图3、4,芯片刚加电时,C t上端电压V1为0V。
图3中,比较器A1的反相输入端+V th为(1/3)V s;比较器A2的同相输入端-V th为(-1/3)V s,故比较器A1、A2的输出均为 0 ,RS触发器D1的输出Q为 0 ,开关K打开,C t以恒流I s充电,其充电过程中的端电压为:V1=I sC tt=43V sR T C tt(5)当C t端电压V1充电至+V th后,比较器A1翻转为1,比较器A2仍为0,则RS触发器D1翻转为1,K闭合,C t以恒流I s放电并反向充电,过程中的端电压为:V1=13V s-I sC tt=13V s-43V sR T C tt(6)当端电压V1为-V th后,比较器A1为0,A2翻转为1,则RS触发器D1翻转为0,K打开,C t以恒流I s放电并反向充电,过程中的端电压为:V1=-13V s+I sC tt=-13V s+43V sR T C tt(7)当端电压V1为+V th后,RS触发器D1的状态再次翻转,重复以上的充放电过程。
这样,电容C t上便形成了三角载波,其波形如图5所示。
图5 RS触发器D1充放电波形2.2.2 P WM波的调制如图3、4所示,比较器A3的-A in(10脚)和比较器A4的+B in(8脚)连接至2脚,得到三角载波输入。
外接调制电压V c经电阻R4、R7分别接 V s,并从+A in(11脚)输入-V R,从-B in(9脚)输入+V R,设计R4=R7,R5=R6,则:+V R=V s-R4R4+R5(V s-V c)=R5R4+R5V s+R4R4+R5V c(8)-V R=-V s+R7R6+R7(V c+V s)=-R6R6+R7V s+R7R6+R7V c=-R5R4+R5V s+R4R4+R5V c(9)此时,比较器A5的同相输入端为V s-2.5>0,A5的反相输入端Shutdown(14脚)接地,故A5的输出为1。
比较器A6的反相输入端-C/L(13脚)为200mV,A6的同相输入端+C/L(12脚)接地,故A6的输出为0,RS触发器D2、D3不复位,这样 与 门D4、D5被打开,比较器A3、A4的调制结果可分别送至A out(4脚)和B ou t(7脚)输出,形成P WM波。
根据式(8)、(9),可对调制波形进行如下几种情况的讨论。
(1)Vc=0时,+VR、-VR、Aout、Bou t的波形如图6所示。
此种情况下,一个周期内A out高电平的时间15与B ou t 高电平的时间相同,输入电动机的直流平均电压为0,电动机停止。
(2)V c >0时,+V R 、-V R 、A out 、B ou t 的波形如图7所示。
图6 V c =0时,+V R 、-V R 、A out 、B o ut波形图7 V c >0时,+V R 、-V R 、A out 、B o ut 波形此种情况下,一个周期内A out 高电平的时间大于B out 高电平的时间,输入电动机的直流平均电压为正,电动机正转。
随着V c 增大,+V R 和-V R 在波形图7中均要上移,不难看出,一个周期内A ou t 高电平的时间增加,B ou t 高电平的时间相应减少,输入电动机的直流平均电压增加,转速增大。
(3)V c <0时,+V R 、-V R 、A out 、B ou t 的波形如图8所示。
图8 V c <0时,+V R 、-V R 、A o ut 、B out 的波形此种情况下,一个周期内A out 高电平的时间小于B out 高电平的时间,输入电动机的直流平均电压为负,电动机反转。
随着V c 减小,+V R 和-V R 在波形图8中均要下移。
由图8分析可知:一个周期内A ou t 高电平的时间减少,B ou t 高电平的时间相应增加,输入电动机的直流平均电压绝对值增加,转速增加。
3 结 语通过分析不难看出无刷直流电动机采用P WM 进行调速,不仅硬件电路结构简单,有现成的集成电路可供采用,而且可靠性高。
此方法目前已应用于烟草卷烟包装机的拉带及铝箔纸展开电机的控制中,得到了良好的控制效果。
从长远角度看,此种调速方法已发展成为无刷直流电机的主流调速模式,有着广阔的应用前景。
参考文献[1] 陈伯时.电力拖动自动控制系统[M ].北京:机械工业出版社,2000.[2] 孙建忠.特种电机及其控制[M ].北京:中国水利水电出版社,2005.收稿日期:2008-08-1916。