基于STM32的消防小车设计共3篇
基于 STM32 的智能灭火机器人设计方案

基于STM32 的智能灭火机器人设计方案本系统以stm32微控制器为核心控制单元,以安装在车体两侧红外传感器来循迹,通过声音传感器启动,使用火焰传感器来检测火焰,以温度传感器检测与火源的距离,并用风扇来灭火。
车身主要以相隔30度的五个红外传感器来调整车身的角度,实现了对运动方向的控制,进而躲避障碍物,实现了在规定区域能自主搜索火源并实施灭火的功效。
标签:stm32;传感器;灭火机器人1 系统整体方案设计智能灭火机器人在声音或人工启动后,左右两侧的电机被驱动旋转,小车在前进的过程中,通过两侧夹角固定红外传感器,来调整两轮的转速,是车体达到前行方向,前行过程中实时监测是否有火源存在,若火焰传感器检测到有火源时,向火源靠拢,当与货源达到一定距离时,温度传感器接收到信号,在单片机处理下使风扇转动,直至火源被灭才停止旋转,然后继续寻找下一火源。
系统总体设计框图如图1。
2 系统硬件设计2.1 结构设计在综合考虑工作受地面摩擦、机器人惯性、机器人电机的转数差、齿轮箱与轮子的摩擦、电压变化等多个因素影响后,为了方便小车在前进过程中,能够直线前进,且没有左右较大的晃动,而且能够平稳转弯,我们采用圆形车体,两电机驱动,前后各安装一个万向轮。
车体主要由电路板,车底盘,风扇架,车轮等构成,为了更加节省车体空间,我们在设计电路板时,将稳压芯片,电机驱动,stm32芯片都焊接在一块板子上,使整个车体看起来更整洁更美观。
在车体前方安装5个红外传感器,并且距中心红外各岔开30度,将两个传感器放在车盘后面,距中心岔开60度。
这样能够使探测的范围更大,有利于对墙壁的探测。
红外的距离大概8cm,经过检测,这样车体能够最快修正,更加平稳。
电池放于车底盘下面,将车的重心降低,更有利于车体稳定。
将风扇提高能够略高于火源,而温度传感器与火焰传感器一般与火源同等高度,风扇要有大概10度的向下倾角,这样就能保证最大范围的灭火。
2.2 电源管理模块设计电源管理模块包括稳压模块与驱动模块。
基于STM32 的喊话救援小车设计
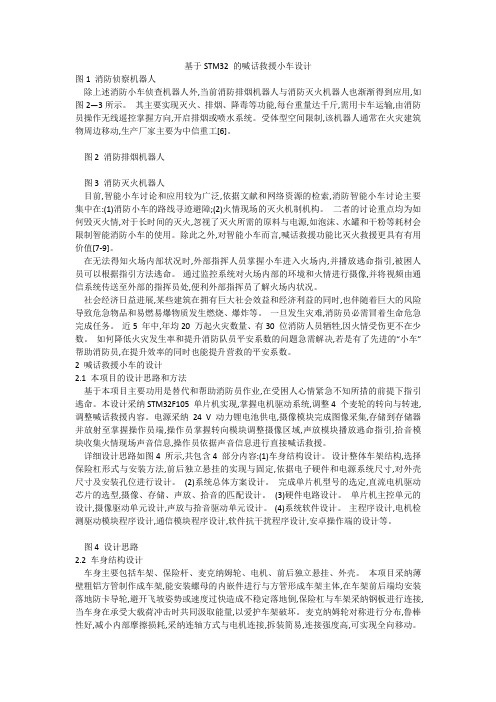
基于STM32 的喊话救援小车设计图1 消防侦察机器人除上述消防小车侦查机器人外,当前消防排烟机器人与消防灭火机器人也渐渐得到应用,如图2—3所示。
其主要实现灭火、排烟、降毒等功能,每台重量达千斤,需用卡车运输,由消防员操作无线遥控掌握方向,开启排烟或喷水系统。
受体型空间限制,该机器人通常在火灾建筑物周边移动,生产厂家主要为中信重工[6]。
图2 消防排烟机器人图3 消防灭火机器人目前,智能小车讨论和应用较为广泛,依据文献和网络资源的检索,消防智能小车讨论主要集中在:(1)消防小车的路线寻迹避障;(2)火情现场的灭火机制机构。
二者的讨论重点均为如何毁灭火情,对于长时间的灭火,忽视了灭火所需的原料与电源,如泡沫、水罐和干粉等耗材会限制智能消防小车的使用。
除此之外,对智能小车而言,喊话救援功能比灭火救援更具有有用价值[7-9]。
在无法得知火场内部状况时,外部指挥人员掌握小车进入火场内,并播放逃命指引,被困人员可以根据指引方法逃命。
通过监控系统对火场内部的环境和火情进行摄像,并将视频由通信系统传送至外部的指挥员处,便利外部指挥员了解火场内状况。
社会经济日益进展,某些建筑在拥有巨大社会效益和经济利益的同时,也伴随着巨大的风险导致危急物品和易燃易爆物质发生燃烧、爆炸等。
一旦发生灾难,消防员必需冒着生命危急完成任务。
近5 年中,年均20 万起火灾数量、有30 位消防人员牺牲,因火情受伤更不在少数。
如何降低火灾发生率和提升消防队员平安系数的问题急需解决,若是有了先进的“小车”帮助消防员,在提升效率的同时也能提升营救的平安系数。
2 喊话救援小车的设计2.1 本项目的设计思路和方法基于本项目主要功用是替代和帮助消防员作业,在受困人心情紧急不知所措的前提下指引逃命。
本设计采纳STM32F105 单片机实现,掌握电机驱动系统,调整4 个麦轮的转向与转速,调整喊话救援内容。
电源采纳24 V 动力锂电池供电,摄像模块完成图像采集,存储到存储器并放射至掌握操作员端,操作员掌握转向模块调整摄像区域,声放模块播放逃命指引,拾音模块收集火情现场声音信息,操作员依据声音信息进行直接喊话救援。
基于STM32单片机的多功能WiFi视频智能灭火小车软件设计

INFORMATION TECHNOLOGY 信息化建设基于STM32单片机的多功能WiFi视频智能灭火小车软件设计摘要:论文基于STM32单片机设计的一款专门为消防员设计的履带式消防车具备实现实时视频与控制。
改装置可实现直线与悬崖红外避障、自动寻迹、超声波避障,自动启动灭火装置进行灭火等功能,因此可以实现无人驾驶进入危险区域,从而保证了消防员的安全。
关键词:消防;STM32;智能车;视频;红外一、前言采用STM32单片机作为控制核心,实现了汽车智能化控制。
系统由多个传感器组成分别为超声波传感器,红外传感器,火焰传感器,循迹的反射式传感器,各个模块都通过单片机来控制各模块功能的实现。
该设计研究不仅解决了消防人员的安全问题,而且能够现场实时图像监控,能自动找到运动轨迹,能自动避开障碍物,也可切换到手动操作[1]。
二、智能消防小车系统软件设计(一) 系统总体方案系统总体框图如图所示:图1 系统总体框图系统分为两个模式;一种是手动模式,另一种是循迹模式,小车将自动运行跟随黑色跑道运行,通过超声波模块发出的方波来监测发出信号的返回情况来设置超声波避障功能,遇到障碍物小车立即停止;红外线发射管检测返回光来实现悬崖避障功能;设计手机app与智能灭火小车之间用WiFi模块实现,通过网络连接能够现场实时图像监控;用火焰传感器来判断是否有火源,在火焰传感器发现传感器测回来的值大于或者等于我设定值之后单片机会立马发出指令让系统灭火当火焰消失之后灭火装置停止。
从中来实现智能小车灭火的功能[2]。
(二)各模块程序编写1.自动循迹功能程序设计小车的循迹是依赖于TCRT5000传感器,照射的是白线道,TCRT5000传感器输出低电平,如果监测的红外光线弱则说明很大部分管线被吸收发射的地方是黑线道TCRT5000传感器输出高电平。
程序如下:if(XunjiL == 1 && XunjiR == 0) // 偏右{TurnLeft();for(xunji_i=0;xunji_i<0x1F;xunji_i++);}else if(XunjiL == 0 && XunjiR == 1) // 偏左{TurnRight();for(xunji_i=0;xunji_i<0x1F;xunji_i++);}else if(XunjiL == 1 && XunjiR == 1) // 正常{Forward();for(xunji_i=0;xunji_i<0x1F;xunji_i++);}else if(XunjiL == 0 && XunjiR == 0) // 失去轨迹{Stop();for(xunji_i=0;xunji_i<0x1F;xunji_i++ )}2.火焰监测以及灭火火焰传感器灭火是通过四线制的传感器,程序的实现具体如下:while(FireCheck == 0) // 检测到火焰{Stop();miehuo_i++;if(miehuo_i<100){GPIO_ResetBits(GPIOC, GPIO_Pin_11);}else if(miehuo_i>300){miehuo_i = 0;GPIO_SetBits(GPIOC, GPIO_Pin_11);}}GPIO_SetBits(GPIOC, GPIO_Pin_11);3.超声波避障系统超声波测距的基本工作原理是传感器每次发送一个大于10 us的脉冲,然后测量返回高电平的时间即可。
《2024年基于STM32的智能小车研究》范文
《基于STM32的智能小车研究》篇一一、引言随着科技的不断进步,智能小车已经成为人们日常生活中不可或缺的一部分。
本文旨在探讨基于STM32的智能小车的研究,详细阐述其设计原理、实现方法及实际应用价值。
STM32系列微控制器以其高性能、低功耗的特点,为智能小车的开发提供了强大的硬件支持。
二、智能小车设计概述智能小车是一种集成了传感器、控制器、执行器等设备的自动驾驶小车。
它可以根据环境变化自动规划路径,实现自主导航、避障、信息采集等功能。
基于STM32的智能小车设计主要包括硬件设计和软件设计两个部分。
硬件设计主要包括STM32微控制器、电机驱动模块、传感器模块、电源模块等。
其中,STM32微控制器作为核心部件,负责整个系统的控制与协调。
电机驱动模块用于驱动小车的运动,传感器模块用于感知环境信息,电源模块为整个系统提供稳定的电源。
软件设计主要包括操作系统、算法实现、通信协议等。
操作系统负责管理系统的软硬件资源,算法实现包括路径规划、避障算法、控制算法等,通信协议用于实现小车与上位机之间的数据传输与控制。
三、硬件设计1. STM32微控制器STM32微控制器是智能小车的核心部件,它具有高性能、低功耗、丰富的外设接口等特点。
在智能小车的设计中,我们选用了适合的STM32系列微控制器,如STM32F4系列,以满足小车的性能需求。
2. 电机驱动模块电机驱动模块用于驱动小车的运动。
它包括电机、编码器、驱动电路等部分。
电机采用直流无刷电机或步进电机,具有较高的控制精度和较低的噪音。
编码器用于检测电机的转速和方向,为控制算法提供反馈信息。
驱动电路则负责将微控制器的控制信号转换为电机能够识别的驱动信号。
3. 传感器模块传感器模块用于感知环境信息,包括红外传感器、超声波传感器、摄像头等。
这些传感器可以实时检测小车周围的障碍物、路况等信息,为路径规划和避障算法提供数据支持。
四、软件设计1. 操作系统操作系统负责管理系统的软硬件资源,包括任务调度、内存管理、设备驱动等。
《2024年基于STM32的智能小车研究》范文

《基于STM32的智能小车研究》篇一一、引言随着科技的飞速发展,智能小车在各个领域的应用越来越广泛,如物流、安防、救援等。
STM32作为一款高性能的微控制器,其强大的处理能力和丰富的接口资源为智能小车的开发提供了有力支持。
本文将详细介绍基于STM32的智能小车研究,包括系统设计、硬件实现、软件编程以及实验结果等方面。
二、系统设计智能小车的系统设计主要包括硬件和软件两部分。
硬件部分主要包括STM32微控制器、电机驱动模块、传感器模块等;软件部分则包括操作系统、驱动程序、算法等。
在硬件设计方面,我们选择了STM32F4系列微控制器作为主控芯片,其具有高性能、低功耗的特点,能够满足智能小车对处理能力和续航能力的要求。
电机驱动模块采用H桥驱动电路,能够实现对电机的正反转和调速控制。
传感器模块包括红外传感器、超声波传感器等,用于实现智能小车的避障、定位等功能。
在软件设计方面,我们选择了实时操作系统(RTOS)作为核心操作系统,以实现多任务管理和调度。
驱动程序采用C语言编写,算法部分则采用了如PID控制算法、模糊控制算法等先进控制算法,以提高智能小车的性能。
三、硬件实现在硬件实现方面,我们首先进行了电路设计。
根据系统需求,我们设计了电源电路、电机驱动电路、传感器电路等。
在电路设计过程中,我们充分考虑了抗干扰性、功耗等因素,以保证智能小车的稳定性和可靠性。
接下来是硬件制作与组装。
我们采用了SMT工艺制作了PCB板,将STM32微控制器、电机驱动模块、传感器模块等元器件焊接到PCB板上。
然后进行组装,将各个模块按照设计要求进行连接,形成完整的智能小车硬件系统。
四、软件编程在软件编程方面,我们首先进行了操作系统移植和驱动程序编写。
我们将RTOS移植到STM32微控制器上,并编写了相应的驱动程序,以实现对硬件设备的控制和管理。
接下来是算法实现。
我们采用了PID控制算法和模糊控制算法等先进控制算法,通过编程实现这些算法在智能小车上的应用。
基于STM32单片机的微型智能消防车的设计

基于STM32单片机的微型智能消防车的设计作者:王晓鹏丁学文王敏军段扬扬李宝盛彭志辉来源:《计算机与网络》2021年第20期摘要:在复杂的消防场景下,如充满有毒物质、易燃易爆物质等的火灾现场,要提高救援效率、有效保证消防人员生命安全和人民的财产安全无疑是一个很大的挑战。
针对此类问题设计了一款微型智能无人消防车。
该智能消防车采用STM32单片机作为控制核心,融合了图像处理技术、多传感器融合技术和无线通信技术,可实现火焰识别、自动消防、有害气体和可燃气体检测、实时控制和监控,具有很好的适用性和可执行性。
关键词:STM32;智能消防;环境检测;远程监控中图分类号:TP391.4文献标志码:A文章编号:1008-1739(2021)20-62-40引言近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。
智能微型无人消防车是无人员投入火灾现场必备的终端设备,是一种代替人员进入火灾现场灭火的设备。
随着我国经济的快速发展,生产性车间、厂房越来越多,其发生火灾时的情况复杂,灭火工作的危险性越来越高。
一些工厂发生火灾时,容易产生有毒有害气体,有的甚至存有易燃易爆物质,对救援工作的展开提出不小的挑战,在这样危险的环境中难以保证消防人员和遇难人员的生命安全。
在此背景下,进行用于灭火抢险的微型智能消防车的创新设计是必要的,旨在尽量减少消防员进入火场的次数,并提高火场救援效率,因此进行了基于图像处理技术、无线通信技术的微型智能消防车的系统设计。
1系统总体构成及设计智能消防车采用STM32F405RGT6单片机作为微控制器、英飞凌公司的BTN7971B作为电机的驱动芯片,这2款芯片性能可靠,可以有效保证智能消防车的稳定运行。
火焰传感器和图像处理技术相结合控制智能消防车消防动作的执行。
智能消防车应用了多传感器融合技术,使得智能消防车具备了环境检测能力。
通过开发嵌入式系统快速识别火焰并准确控制消防水泵,实现消防车的高度智能化和自动化。
基于STM32的智能火灾监测及灭火系统设计

河南科技Henan Science and Technology 信息技术总778期第八期2022年4月基于STM32的智能火灾监测及灭火系统设计徐崇奇解建国毕佳琦潘广禄(山东农业大学,山东泰安271018)摘要:近年来火灾频发,尤其是森林、丘陵等地区成为火灾的高发地区,其不仅会造成大量的财产损失,还会对人群造成严重的伤害,甚至引发一系列生态问题,破坏大自然生态平衡。
传统的火情监控方式耗时耗力,且一般不能及时处理险情,极易造成不可挽回的损失。
基于此,本研究设计并制作了以STM32为核心板的智能火灾监测及灭火小车系统。
其采用履带式底盘,可在丘陵等地形复杂的环境中前行,在合理有效避障的过程中检测火源并进行初步灭火,利用透射模块将北斗定位发送至阿里云平台,实现火情信息的实时监测传输,经试验测试,该系统稳定高效,对当今火灾防护研究与探索具有一定的现实价值和意义。
关键词:火源搜索;自动避障;履带底盘;超声波避障;无线通信中图分类号:TP368.1;TP23文献标志码:A文章编号:1003-5168(2022)8-0029-05 DOI:10.19968/ki.hnkj.1003-5168.2022.08.006Design of STM32Based Intelligent Fire Monitoring and Fire Suppres⁃sion SystemXU Chongqi XIE Jianguo BI Jiaqi PAN Guanglu(Shandong Agricultural University,Tai′an271018,China)Abstract:In recent years,fires are frequent,especially in forest,hilly areas and other areas have become fire-prone areas,which not only cause a lot of property damage,but also bring serious injuries to people and even cause a series of ecological problems to destroy the ecological balance of nature.Based on the background that traditional fire monitoring methods are time-consuming and labor-intensive and gener⁃ally fail to deal with dangerous situations in a timely manner,which can easily cause a series of irrepa⁃rable losses,we designed and fabricated an intelligent fire monitoring and fire extinguishing cart system with STM32as the core board.The cart adopts a crawler chassis,which can be applied to travel in hilly and other terrain with complex environment.It can detect the fire source in the process of reasonable and effective obstacle avoidance,carry out preliminary fire extinguishing and use the transmission module to send the Beidou positioning to Ali cloud platform to realize the real-time monitoring and transmission of fire information.Keywords:fire search;automatic obstacle avoidance;crawler chassis;ultrasonic obstacle avoidance;wire⁃less communication0引言目前,我国的火灾形势总体比较严峻。
《2024年基于STM32智能小车的设计与实现》范文

《基于STM32智能小车的设计与实现》篇一一、引言随着科技的不断进步,智能小车作为一种集成了计算机、传感器和执行器等技术的产品,已经在各个领域得到了广泛的应用。
本文旨在设计并实现一款基于STM32微控制器的智能小车,通过对小车的硬件设计和软件编程进行详细的阐述,以期为相关领域的科研和实践提供一定的参考。
二、硬件设计1. 微控制器选择本设计选用STM32F4系列微控制器,该系列具有高性能、低功耗等特点,能够满足智能小车在复杂环境下的实时控制需求。
2. 传感器模块传感器模块包括红外避障传感器、超声波测距传感器、光电编码器等。
这些传感器能够实时获取小车的环境信息,为小车的智能控制提供数据支持。
3. 电机驱动模块电机驱动模块采用H桥电路,通过PWM信号控制电机的转速和方向。
同时,为了保护电机和电路,还设置了过流、过压等保护措施。
4. 电源模块电源模块采用锂电池供电,通过DC-DC转换器为小车各部分提供稳定的电源。
同时,为了方便充电,还设置了USB接口。
三、软件实现1. 开发环境搭建本设计采用Keil uVision5作为开发环境,通过JTAG或SWD 接口进行程序的烧录和调试。
2. 程序设计程序设计包括主程序、传感器数据处理程序、电机控制程序等。
主程序负责协调各部分的工作,传感器数据处理程序负责获取并处理传感器的数据,电机控制程序则根据数据处理结果控制电机的转速和方向。
3. 算法实现本设计采用PID算法进行电机控制,通过调整PID参数,使小车在各种环境下的运动更加稳定。
此外,还实现了路径规划算法和避障算法,使小车能够根据环境信息自主规划路径和避障。
四、系统测试与实现效果1. 系统测试在完成硬件设计和软件编程后,对智能小车进行了系统测试。
测试内容包括小车的运动性能、传感器数据的准确性、电机控制的稳定性等。
测试结果表明,本设计的智能小车具有良好的性能和稳定性。
2. 实现效果在实际应用中,本设计的智能小车能够根据环境信息自主规划路径、避障和执行其他任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于STM32的消防小车设计共3篇
基于STM32的消防小车设计1
消防小车是一种可以在紧急情况下快速响应的灭火设备。
它可以在火
场中进行精确定位和目标搜索,并通过自主导航技术和遥控操作实现
火场内部和外部的水枪喷射。
今天,我将讨论基于 STM32 的消防小车
设计。
1. 系统设计
为确保消防小车的高可靠性和快速响应,我们需要采用分布式控制设计,将解决方案分为两个部分:
①车体电控系统:这是消防小车的核心系统,采用STM32作为主控芯片,主要实现车体驱动、导航定位、图像采集和识别、云端数据传输
等功能。
②远程控制系统:在消防小车实际应用中,操作员通常需要远程控制
车辆,并与车载硬件实现实时通信。
因此,我们需要开发适用于手机
或电脑的遥控软件,以保证消防工作人员能快速响应火灾。
2. 车体结构设计
消防小车的车体设计应以易于操作和便于携带为原则。
基于这一原则,我们设计了以下结构:
①底盘:采用四轮驱动的底盘设计,可以提高消防小车的悬挂性能和
越野能力。
②上层机构:上层机构包括水泵、水管、水枪等配件。
水泵负责将水
源(如消防水源或水箱)中的水通过管道送入水枪,以便消防工作人
员进行灭火。
③传感器:传感器可用于检测温度、气体、光线等指标,从而实现对
火场的实时监控,并及早发现潜在危险。
3. 系统硬件设计
为了实现消防小车的各项功能,我们需要设计一系列的硬件模块,包
括驱动模块、通信模块、电源模块和传感器模块等。
在STM32控制下,我们可以使用各种类型的传感器,如红外线传感器、超声波传感器、逐行扫描摄像头等,以便检测火点、障碍物、路线等
信息。
此外,可以使用无线模块实现车载设备和操作员之间的实时数
据传输,以支持火场内、外的联动操作。
4. 系统软件设计
消防小车的软件系统包括车辆控制程序、导航程序、图像处理程序等
多个模块。
这些程序的设计将为实现装备运行、路线规划、火情识别
等任务奠定基础。
①控制程序:可实现车辆的前进、后退、左转和右转等基本功能,同
时还可以启动水泵和水枪等硬件设备。
②导航程序:消防小车需要在复杂环境中进行定位、路径规划和避障
等任务。
导航系统将通过超声波测距、陀螺仪、地磁传感器等技术,
实现较高精度的路径规划和位置定位。
③图像处理程序:将车载摄像头采集到的图像传输到云端,进行火情
识别,并向操作员发送警报以及预测的火场情况。
5. 可行性分析
通过上述分析,我们可以发现,在STM32控制下,消防小车可以实现
一系列应急任务。
该设计具有如下优点:
①简单可靠:在易于操作和便于携带的原则下,我们可以避免使用复
杂的控制系统和结构设计,从而最大限度地提高消防小车的可靠性和
效率。
②高灵活性:消防小车可以根据实际需要添加或去除各种配件,以满
足不同的消防任务的要求。
③完备的软硬件系统:车体电控系统和远程控制系统的结合使得操作
方便、实时,并且软件系统具备较高的图像识别技术。
这一设计能满
足消防人员的需求,更加科学有效地参与火灾扑救任务。
综上所述,基于STM32的消防小车设计可实现高效、精准的灭火能力,并能够在复杂环境中高信号传输稳运行。
该设计将为应对紧急灾难和
保护人类生命和财产做出重要贡献。
基于STM32的消防小车设计2
消防小车是一种用于灭火和救援的机器人设备,它可以在火灾或其他
紧急情况下迅速移动并执行任务。
本设计基于STM32,利用它的丰富的外设和强大的计算能力,设计一款实用的消防小车。
一、硬件设计
1.主控芯片选择
本设计选用了STM32F103C8T6主控芯片。
这是一款性价比高、功能丰
富的ARM处理器,拥有72MHz的主频,64KB的Flash存储器和20KB的SRAM,支持多种通信接口,如SPI、I2C、CAN等,可满足小车的各种控制需求。
2.机械结构
消防小车的机械结构应具有足够的灵活性,以适应不同的操作环境和任务需求。
在本设计中,选用了三轮全向轮底盘结构,能够实现360度无死角的移动和转向控制。
小车的机身采用铝合金材料,外壳采用ABS塑料,具有良好的耐热性和防火性能。
3.传感器和执行器
消防小车需要多种传感器和执行器,以实现各项任务。
本设计中,主要包括以下器件:
(1)多功能传感器:包括温度、湿度、气压、光强等多种传感器,可实现多种环境参数的监测。
(2)火焰传感器:可对周围环境中的火焰进行检测,确定火源位置。
(3)避障传感器:通过超声波或红外线等方式,检测前方障碍物,避免碰撞。
(4)水泵和水箱:用于输送灭火用水,采用高效、低噪音的水泵和大容量的水箱。
二、软件设计
1.系统架构设计
本系统采用分层式架构,将软件系统划分为底层驱动、功能库和应用层三个部分。
底层驱动层负责与硬件设备的交互,如GPIO、ADC、USART等通讯接口的控制。
功能库层为应用层提供各种常见的算法和驱动模块,如PID控制、模糊控制、运动控制等。
应用层则实现消防小车的具体功能,如避障、环境监测、火源定位等。
2.控制系统设计
消防小车的控制系统是整个软件系统的核心。
首先,需要对底盘进行控制,根据传感器检测到的障碍物和环境参数,计算车体的移动方向和速度,并输出控制指令给电机控制器,使车体实现准确的移动和转向。
其次,需要实现火源定位和灭火功能。
通过火焰传感器检测到火焰信号后,根据火焰信号的方向和强度,计算出火源位置并发送指令给底盘控制器使消防小车自动移动到火源位置,在此基础上结合水泵和水箱进行灭火。
最后,需要对消防小车进行远程监控和控制。
利用无线网络通信,将小车的传感器数据和状态信息上传至上位机,实现远程监控。
同时,可以通过上位机发送指令,对小车进行遥控和控制。
三、总结
通过基于STM32的消防小车设计,可以实现小车的自主移动和环境监测,火源定位和灭火功能,远程监控和遥控等多种功能。
这为消防救援行业提供了更加智能化和高效的工具,提高了紧急救援的效率和效果。
基于STM32的消防小车设计3
消防小车是用于灭火和搜救的特殊车辆,重要的是它的响应时间和操作的灵活性。
本文介绍的是基于STM32的消防小车设计,主要包含硬件设计和软件设计两个方面。
1. 硬件设计
1.1 主控芯片的选择
我们选择STM32作为主控芯片,因为它具有较高的性能和可靠性,能够支持多种通信协议和接口,比如CAN、UART、SPI等,并且STM32在开发环境和应用软件上有很好的支持。
1.2 电源电路设计
消防小车需要有稳定的电源供应,因此我们需要设计一个稳定、可靠的电源电路。
可以使用降压、升压芯片等电路实现电源电压的稳定输出,并进行过压、过流保护等设计。
1.3 传感器模块
为了保证消防小车能够及时响应火灾,我们需要使用多个传感器进行实时监测。
例如,可使用温度传感器、气体传感器、烟雾传感器、激光传感器等。
通过测量温度、氧气含量等参数,可以预测火源位置和火势严重程度,从而有针对性地进行灭火和搜救。
1.4 驱动电路
消防小车需要使用多种驱动器件,如电机、舵机、液晶显示器等,用于控制小车的行进方向、速度等操作。
因此我们需要针对不同的驱动器件设计相应的驱动电路,比如使用H桥驱动电路控制直流电机,使用电压锁相环(PLL)控制舵机等。
2. 软件设计
2.1 系统框架设计
我们通过使用Keil MDK进行软件开发,并采用模块化设计的思路来实
现系统功能。
具体包括实时监测模块、控制模块、数据处理模块、用
户交互模块等。
每个模块都可以单独测试和调试,降低了系统开发的
难度和复杂度。
2.2 实时监测模块
该模块主要实现对各种传感器的实时监测,包括采集传感器信息并发
送到主控芯片,比如温度、气体、烟雾等。
其次,该模块还需要实现
对传感器信息的处理和分析,如计算温度变化率、氧气含量等,从而
可以预测火源位置和火势严重程度。
2.3 控制模块
该模块主要实现消防小车的运动控制,包括控制电机反转、左右转向、前进后退等操作。
可通过PWM输出和电机驱动电路实现电机速度和方
向的控制。
另外,该模块还需要实现对舵机的控制,用于控制小车的
转向方向。
2.4 数据处理模块
该模块主要负责数据的存储、处理和分析。
可使用FLASH或SD卡等存
储介质,将采集到的传感器数据进行记录和保存。
同时,该模块还需
要对保存的数据进行处理和分析,以便用户对数据进行查看和分析,
从而实现消防小车的性能优化。
2.5 用户交互模块
该模块主要负责消防小车的用户交互界面实现。
可使用液晶显示器或
触摸屏等,实现小车的状态显示、数据分析、接收和发送数据等功能。
用户可以通过屏幕中的菜单和按钮来进行消防小车的操作控制和数据
查看和分析。
综上所述,基于STM32的消防小车设计具有多种传感器实时监测、操
作便捷、实时响应等特点,而主控芯片的高性能和可靠性也为系统的
开发和应用提供了很好的保障。