李雅普诺夫稳定性分析(二)
李雅普诺夫稳定性分析方法

(2)李雅普诺夫第二方法
• 也称直接法,属于直接根据系统结构判断内 部稳定性的方法.
• 该方法直接面对非线性系统,基于引入具有 广义能量属性的Lyapunov函数和分析李氏 函数的定量性, 建立判断稳定性的相应结 论.
• 因此直接法也是一般性方法----Lyapunov 第二法更具有一般性.
(2).平衡状态的形式.平衡状态 可由方程定 出,对二维自治系统, 的形式包括状态空 间中的点和线段.
(3).不唯一性.平衡状态 一般不唯一.
对定常线性系统而言,平衡状态 的解.
• 若矩阵A非奇,则有唯一解 • 若矩阵A奇异,则解 不唯一.
为方程
(4).孤立平衡状态,该状态是指状态空间彼此 分隔的孤立点形式的平衡状态,孤立平衡状 态的重要特征是:通过坐标移动可将其转换 为状态空间的原点.
• Lyapunov函数与
有关,用V(x)来
表示.
• 一般情况下V(x)>0 , 间的变化率.
表示能量随时
•当 少.
表明能量在运动中随时间推移而减
•当 加.
表明能量在运动中随时间推移而增
1.预备知识 1).标量函数V(x)性质意义:
令V(x)是向量x的标量函数,Ω是x空间包含 原点的封闭有限区域. (1).如果对所有区域Ω中的非零向量x,有 V(x)>0,且在x=0处有V(x)=0则在域Ω内称 V(x)为正定.
(3)用李氏方法分析的必要性 • 以一个例子说明:用特征值来判断线性时变
系统一般稳定性是会失效的.
• 其中特征值为 -1,-1.
• 但由于其解为
• 当 时,若 则必有 • 故平衡状态是不稳定的,即系统的实际表现
李雅普诺夫第二方法判断负定
李雅普诺夫第二方法判断负定嘿,咱今儿来聊聊李雅普诺夫第二方法判断负定这事儿啊!这可真是个有点奇妙的玩意儿呢。
你想啊,就好像咱在走一条路,得判断这条路是不是稳当,能不能走得通。
李雅普诺夫第二方法就像是个厉害的导航仪,帮咱看清这条路的情况。
说起来,这负定是个啥呢?它就好像是个标志,告诉我们系统是不是稳定地朝着某个方向走。
如果是负定的,那就好像有个小箭头一直指着稳定的方向,让我们心里有底。
咱可以想象一下,一个摇摇晃晃的不倒翁,它为啥不会倒呢?就是因为它内在有某种力量在维持着平衡呀,这就有点像负定的感觉。
当系统呈现出负定时,就好像不倒翁找到了自己的平衡之道。
那怎么用李雅普诺夫第二方法去判断这个负定呢?这可得有点技巧啦!就像我们要分辨一个东西是好是坏,得从各个方面去观察、去分析。
要看看那些个数学式子啦,函数啦,是不是符合负定的特征。
这可不是随随便便就能搞定的事儿哦!得仔细琢磨,认真思考。
就好像解一道很难的谜题,得一点点地去寻找线索,去拼凑出答案。
你说,要是咱能轻松地就用这个方法判断出负定,那该多厉害呀!就像有了一双火眼金睛,能看穿一切不稳定的因素。
而且哦,这李雅普诺夫第二方法可不只是在数学里有用,在好多实际问题中也大有用处呢!比如说在工程领域,要是能判断出系统是不是稳定负定,那就能保证工程的安全和可靠啦。
想象一下,如果一座大桥在建造的时候没有考虑到稳定性,那后果得多可怕呀!但有了李雅普诺夫第二方法,就好像给大桥加上了一道保险,让我们能放心地走在上面。
总之呢,李雅普诺夫第二方法判断负定这事儿,真的是很有意思也很重要的。
我们得好好去研究它,去掌握它,让它为我们的学习和工作带来帮助呀!难道不是吗?这可真的是值得我们花时间和精力去弄明白的呀!。
李雅普诺夫第二法

李雅普诺夫第二法李雅普诺夫第二法又称直接法,它是从能量观点进行稳定性分析的,它的基本思想是建立在这样一个物理事实基础之上,即:由经典力学理论可知,对于一个振动系统,如果系统的总能量随时间增长而连续减少,直到平衡状态为止,那么振动系统是稳定的。
1)渐进稳定的判据定理1设系统的状态方程为(,)x f x t =其中平衡状态为0e x =,满足(0,)0f t =,如果存在一个具有连续一阶偏导数的标量函数(,)v x t ,且满足以下条件:(1)(,)v x t 是正定的;(2)(,)vx t 是负定的。
则系统在原点处的平衡状态是一致渐进稳定的。
此外,如果当||||x →∞,有(,)v x t →∞,则在原点处的平衡状态是大范围一致渐进稳定的。
2)渐进稳定的判据定理1设系统的状态方程为(,)x f x t =其中平衡状态为(0,)0f t =,如果存在一个具有连续一阶偏导数的标量函数(,)v x t ,且满足以下条件:(1)(,)v x t 是正定的;(2)(,)vx t 是负定的。
(3)(,)v x t 在0x ≠时不恒等于零,则系统在原点处的平衡状态是大范围渐进稳定的。
3)李雅普诺夫意义下稳定的判别定理设系统的状态方程为=x f x t(,)其中平衡状态为(0,)0f t=,如果存在一个具有连续一阶偏导数的标量函数v x t,且满足以下条件:(,)(1)(,)v x t是正定的;(2)(,)是负定的。
v x t(3)则系统在原点处的平衡状态在李雅普诺夫意义下是一致稳定的。
4)不稳定的判别定理设系统的状态方程为=x f x t(,)其中平衡状态为(0,)0f t=,如果存在一个具有连续一阶偏导数的标量函数v x t,且满足以下条件:(,)(1)(,)v x t是正定的;(2)(,)是正定的。
v x t则系统在原点处的平衡状态是不稳定。
ch4李亚普诺夫稳定性分析
说明:
x 1、对于线性定常系统: e f ( xe ) Axe 0
A为非奇异阵时,xe=0是其唯一的平衡状态。 A为奇异阵时,系统有无穷多个平衡状态。 2、对于非线性系统,有一个或多个平衡状态。 3、对任意孤立的 x e 0 ,总可经过一定的坐标变换,把它化 到坐标原点(即零状态)。一般将平衡状态取为状态空间 原点。
经典控制理论 (线性系统) 李氏意义下 不稳定 Re(s)>0 不稳定 临界情况 Re(s)=0 稳定 (极限环,不超出 某个球域即可) 稳定 Re(s)<0 渐近稳定
2012-6-26
13
[本节小结]: 1、平衡状态定义、求法
2、李氏稳定性概念
1)稳定、一致稳定。 2)渐近稳定、一致渐近稳定。 3)大范围渐近稳定。 4)不稳定。
如果
p ik p ki
,则称P为实对称矩阵。
V (x) 0
1)正定性:当且仅当x=0时,才有
;对任意 ;对任意非
非零X,恒有
零x,恒有
2012-6-26
2012-6-26 10
渐近稳定比稳定更重要,但它是一个局部概念,平衡状态局 部稳定并不意味着整个系统能正常工作。确定其渐近稳定的 最大区域很重要。
3、大范围渐近稳定
如果对状态空间的任意点,不管初始偏差有多大(即从状态 空间中所有初始状态出发的轨迹),都有渐近稳定特性。即:
lim x x e 0
1、函数 h ( t ) 有界含义: 对于函数 h ( t ),在 0 , 时间区间内存在实常数 k ,满足 h ( t ) k 。
2、尽管在定义时提到了输入和扰动作用,但对线性定常系统来 说,系统稳定与否完全取决于系统本身的结构和参数,稳定性 是系统本身的一种特性,而与输入作用无关。
李亚普诺夫稳定性分析和二次型最佳控制
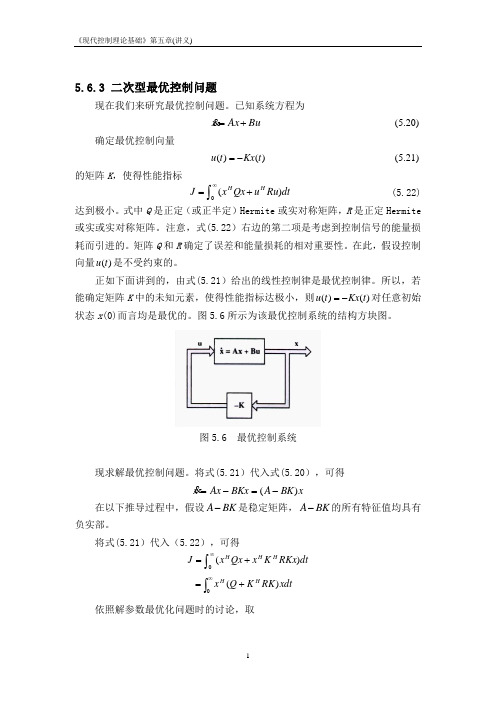
5.6.3 二次型最优控制问题现在我们来研究最优控制问题。
已知系统方程为Bu Ax x+= (5.20) 确定最优控制向量)()(t Kx t u -=(5.21) 的矩阵K ,使得性能指标(5.22)达到极小。
式中Q 是正定(或正半定)Hermite 或实对称矩阵,R 是正定Hermite 或实或实对称矩阵。
注意,式(5.22)右边的第二项是考虑到控制信号的能量损耗而引进的。
矩阵Q 和R 确定了误差和能量损耗的相对重要性。
在此,假设控制向量)(t u 是不受约束的。
正如下面讲到的,由式(5.21)给出的线性控制律是最优控制律。
所以,若能确定矩阵K 中的未知元素,使得性能指标达极小,则)()(t Kx t u -=对任意初始状态x (0)而言均是最优的。
图5.6所示为该最优控制系统的结构方块图。
图5.6 最优控制系统现求解最优控制问题。
将式(5.21)代入式(5.20),可得()xAx BKx A BK x =-=- 在以下推导过程中,假设BK A -是稳定矩阵,BK A -的所有特征值均具有负实部。
将式(5.21)代入(5.22),可得⎰⎰∞∞+=+=0)()(xdtRK K Q x dtRKx K x Qx x J H H H H H依照解参数最优化问题时的讨论,取⎰∞+=0)(dtRu u Qx x J HH)()(Px x dtd x RK K Q x HH H -=+ 式中的P 是正定的Hermite 或实对称矩阵。
于是])()[()(x BK A P P BK A x x P x Px xx RK K Q x H H H H H H -+--=--=+ 比较上式两端,并注意到方程对任意x 均应成立,这就要求)()()(RK K Q BK A P P BK A H H +-=-+-(5.23)根据Lyapunov 第二法可知,如果BK A -是稳定矩阵,则必存在一个满足式(5.23)的正定矩阵P 。
李亚普诺夫判稳第二法 现代控制理论 教学PPT课件

假设 V ( x) 0
V ( x) 2(1 x2 )2 x22
a.x2 (t) 0, x1任意
x2
(t )
0
x2
x2
(t ) (t )
0 0
x1 (t )
x1
(t
)
0 0
意味只有零平衡状态才满足。
b.x2 (t) 1, x1任意
x2
(t
)
1
x2 x2
(t (t
) )
1 0
由判据3,系统在零平衡状态是不稳定的。
2021年4月30日
第5章第19页
例5.18 分析此系统的稳定性。
解1)求平衡状态
xe1 xe2
0 0
2)选择能量函数
0 x 1
1 1 x
a.V ( x) 2x12 x22 0 V ( x) 4x1x1 2x2x2 4x1(x2 ) 2x2 (x1 x2 ) 2x1x2 2x22,不定
2021年4月30日
第5章第18页
例5.16分析系统的稳定性。
x
Ax,
A
1 1
1 1
解1)求平衡状态
2)选择能量函数
xe1
xe
2
0 0
V ( x) x12 x22 0 V ( x) 2x1x1 2x2 x2 2x1(x1 x2 ) 2x2 (x1 x2 ) 2(x12 x22 ) 0
x1 (t )
R L
x1 (t )
1 L
x2 (t)
iR L
x2 (t)
1 C
x1 (t )
u
Cy
y(t) x2 (t)
电容能量 电感能量
T
Q2 2C
1 2
李亚普诺夫稳定性分析

李亚普诺夫稳定性分析
可是在相当长的一段时间里,李雅普诺夫第二法并没有 引起研究动态系统稳定性的人们的重视,这是因为当时 讨论系统输入输出间关系的经典控制理论占有绝对地 位。 ➢ 随着状态空间分析法引入动态系统研究和现代控制 理论的诞生,李雅普诺夫第二法又重新引起控制领域 人们的注意,成为近40年来研究系统稳定性的最主要 方法,并得到了进一步研究和发展。 ➢ 本章节将详细介绍李雅普诺夫稳定性的定义,李雅普 诺夫第一法和第二法的理论及应用。
定理2 设定常系统的状态方程为 x f (x)
其中xe=0为其平衡状态。 ➢ 若存在一个有连续一阶偏导数的正定函数V(x),满足 下述条件: 1) 若 V ( x ) 为负定的; 2) 当||x||→,有V(x)→, 则该系统在原点处的平衡状态是大范围渐近稳 定的。
李亚普诺夫稳定性分析
对上述李雅普诺夫稳定性定理的使用有如下说明:
况,则 V ( x ) 为正半定或负半定。不属以上所有情况的V ( x ) 不定。
李亚普诺夫稳定性分析
2. 李雅普诺夫第二法的主要定理
下面分别介绍李雅普诺夫稳定性分析的如下3个定理: ➢ 渐近稳定性定理 ➢ 稳定性定理 ➢ 不稳定性定理
李亚普诺夫稳定性分析
2. 李雅普诺夫第二法的主要定理
(1) 定常系统大范围渐近稳定性定理1
✓ 但对于时变系统来说,则这两者的意义很可能不同。
对于李雅普诺夫渐近稳定性,还有如下说明: ➢ 稳定和渐近稳定,两者有很大的不同。 ✓ 对于稳定而言,只要求状态轨迹永远不会跑出球域 S(xe,),至于在球域内如何变化不作任何规定。 ✓ 而对渐近稳定,不仅要求状态的运动轨迹不能跑出 球域,而且还要求最终收效或无限趋近平衡状态xe。
6.2 Lyapunov第二方法
AT (P1 P2 ) (P1 P2 )A 0
因此,
eAT t [AT (P1 P2 ) (P1 P2 )A]eAt 0
d dt
[eAT t
(P1
P2
)eAt
]
0
eATt (P1 P2 )eAt C t
t0 P1 P2 C
又
limt eATt (P1 P2 )eAt 0
m12
0
2a22 m22 1
A1
上述方程组的系数矩阵A1的行列式为
det( A1 )
4(a11
a 22
)(a11a22
aa 12
21
)
4(a11
a 22
)
det(A)
若detA10,方程组就有唯一解,其解为
P
2
det(A)
a221
a222
(a12a22
a 21a11 )
det(A1) (a12a22 a21a11) det(A) a121 a222
层层相套、随 C 0 而向原点退缩。又由 V 半负
定知V(x)的值沿着运动轨道只能减小或保持定值而 不会增加,这表明系统关于原点(零解)是稳定的。
x2 x1
x2 x1
定理5( Lyapunov渐近稳定性定理) 如果对微分方程组(6.20)可以找到一个函数V ( x),满足
(1)V ( x) 0
v(x ) xT Px
对其沿方程的解微分,有
V xT (AT P P A)x xTQx 0
由定理7-21*知零解渐近稳定。
必要性:若dV/dt=Ax渐近稳定,要证明对任意给定
的对称正定阵Q,有唯一的正定对称阵P存在,使得 (?)成立。为此,考虑矩阵微分方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由于变换后的对角线矩阵的对角线上的元素都大 于零,故矩阵P为正定的。因此,系统为大范围 渐近稳定的。 此时,系统的李雅普诺夫函数和它沿状态轨线对 时间t的全导数分别为
1 T 3 1 V ( x ) = x Px = x x > 0 2 1 2 0 T T − 1 V ′(x) = −x Qx = x x < 0 0 − 1
T
例5-10 控制系统方块图如下图所示。 要求系统渐近稳定,试确定增益的取值范围。
x3
k s +1
1 s+2
x2
1 s
x1
-
解: 由图可写出系统的状态方程为 ɺ 1 0 x1 x1 0 x = 0 x ɺ2 −2 1 2 x3 − k 0 − 1 x 3 ɺ
例5-9 试确定用如下状态方程描述的系统的平衡态稳 定性。 ′ x1 0 1 x1 x′ = − 1 − 1 x 2 2 解: 设选取的李雅普诺夫函数为 V(x)=xTPx 由定理5-7可知,上式中的正定矩阵P满足李雅普 诺夫方程 PA+ATP=-I. 于是,令对称矩阵P为
由于V’(x)正半定,但其只在x1=0,x2=0时才恒为零, 而在其他状态不恒为零,因此由定理5-6的2)可知, 系统的该平衡态为不稳定的。
下面将前面讨论的李雅普诺夫稳定性的判定方法 作一小结
V(x) 正定(>0) V’(x) 负定(<0) 结论 该平衡态渐近稳定
负半定(≤0)且不恒为0 正定(>0) 该平衡态渐近稳定 (对任意非零的初始状态的解) 正定(>0) 正定(>0) 正定(>0) 负半定(≤0)且恒为0 (对某一非零的初始状态的解) 正定(>0) 该平衡态稳定 但非渐近稳定 该平衡态不稳定
ห้องสมุดไป่ตู้
不难看出,原点为系统的平衡状态。 选取Q为非负定实对称矩阵,则
上述定理给出了一个判别线性定常连续系统渐近稳 定性的简便方法,该方法 不需寻找李雅普诺夫函数, 不需求解系统矩阵A的特征值,只需解一个矩阵 代数方程即可,计算简便。 该矩阵方程又称为李雅普诺夫矩阵代数方程。 由上述定理,可得如下关于正定矩阵P是李雅普 诺夫矩阵方程的唯一解的推论。
推论5-1 如果线性定常系统x’=Ax在平衡态xe=0是渐 近稳定的,那么李雅普诺夫代数方程 PA+ATP=-Q 对给定的任意正定矩阵Q,存在唯一的正定矩阵解P。 由定理5-7及其推论5-1可知,运用此方法判定系 统的渐近稳定性时,最方便的是选取Q为单位矩 阵,即Q=I。 于是,矩阵P的元素可按如下李雅普诺夫代 数方程: PA+ATP=-I 求解,然后根据P的正定性来判定系统的渐 近稳定性。
3. 李雅普诺夫第二法的几个定理
下面分别介绍李雅普诺夫稳定性分析的如下3个定 理: 渐近稳定性定理(定理5-4) 渐近稳定性定理 稳定性定理(定理5-5) 稳定性定理 不稳定性定理(定理5-6) 不稳定性定理
(1) 渐近稳定性定理
定理5-4 设系统的状态方程为 定理 x’=f(x,t) 其中xe=0为其平衡态。 若存在一个有连续一阶偏导数的正定函数V(x,t), 满足下述条件: 1) 若V’(x,t)为负定的,则该系统在原点处的 平衡态是一致渐近稳定的; 2) 更进一步,若随着||x||→∞,有V(x,t)→∞, 那么该系统在原点处的平衡态是大范围一致 渐近稳定的。
李雅普诺夫定理是判别系统稳定性的一个重要方 法和结论。 它不仅适用于线性系统,也适用于非线性系统; 既适用于定常系统,也适用于时变系统。 因此,李雅普诺夫第二法是判别系统稳定性 的具有普遍性的方法。 对上述李雅普诺夫稳定性定理的使用有如下说明: 1) 此定理只为判别系统一致渐近稳定的充分条件, 而非必要条件。 也就是说,若找到满足上述条件的一个李雅 普诺夫函数,则系统是一致渐近稳定或大范 围一致渐近稳定的。
p11 P= p12 p12 p22
将P代入李雅普诺夫方程,可得
p11 p12 0 1 0 − 1 p11 p12 1 0 p − 1 − 1 + 1 − 1 p = − 0 1 12 p22 12 p22
2 V (x) = x12 + x2 2 ′ ′ V ′(x) = 2 x1 x1 + 2 x2 x2 = −2 x2 ≤ 0
由于V’(x)是负半定函数,由定理5-5的1)可知, 系统为一致稳定的。
′ x1 = x2 ′ x2 = − x1 − x2
对例5-5,选取李雅普诺夫函数为
1 2 2 V ( x , t ) = ( x1 + x2 ) 2 + 2 x1 + x2 2
[
]
则
2 2 ɺ V ( x , t ) = −( x1 + x2 )
是负定的,系统在原点处的平衡状态是渐近稳定的。
例5-6 试确定用如下状态方程描述的系统的平衡态稳 定性。 ′ k >0 x1 = kx2 ′ x2 = − x1 解: 显然,原点(0,0)是给定系统的唯一平衡态,如果 我们选择正定函数 2 2 V (x) = x1 + kx2 为李雅普诺夫函数,那么沿任意轨迹x(t),V(x)的全 导数 ′ ′ V ′(x) = 2 x1 x1 + 2 x2 x2 = 2kx1 x2 − 2kx1 x2 ≡ 0 由于V’(x)非正定,由定理5-5的1)可知,系统为 一致稳定的。
例5-4 试确定用如下状态方程描述的系统的平衡态稳 定性。
′ x1 = x2 ′ x2 = − x1 − x2
解: 显然,原点(0,0)是给定系统的唯一平衡态,如果 我们选择正定函数 2 2 V (x) = x1 + x2 为李雅普诺夫函数,那么沿任意轨迹x(t),V(x)对时间 的全导数 2 ′ ′ V ′(x) = 2 x1 x1 + 2 x2 x2 = −2 x2 ≤ 0 是负定函数,故由定理 定理5-4知,根据所选的李雅普诺夫 定理 函数分析不出该平衡态是否渐近稳定或稳定。 但这也并不意味着该平衡态就并不渐近稳定。
例5-7 试确定用如下状态方程描述的系统的平衡态稳 定性。 ′ x1 = x2 2 x′ = − x1 + x2 解: 显然,原点(0,0)是给定系统的唯一平衡态,如果 我们选择李雅普诺夫函数为 2 2 V ( x) = x1 + x2 则
2 ′ ′ V ′(x) = 2 x1 x1 + 2 x2 x2′ = 2 x2 ≥ 0
展开后得,有:
− 2 p12 p − p − p 12 22 11 p11 − p12 − p22 1 0 = − 0 1 2 p12 − 2 p22
因此,得如下联立方程组:
− 2 p12 = −1 p11 − p12 − p22 = 0 2 p − 2 p = −1 12 22
由此定理的结论可知,定理5-5不仅可用于判别平衡 态的稳定性,而且可作为定理5-4的补充,用于判别 平衡态的渐近稳定性。 例5-5 试确定例5-4的系统的平衡态稳定性。
′ x1 = x2 2 x′ = − x1 − x2
解: 前面已经定义例5-4的系统的李雅普诺夫函数。 该函数及其导数分别为
设线性定常连续系统的状态方程为 x’=Ax 这样的线性系统具有如下特点: 1) 当系统矩阵A为非奇异时,系统有且仅有一个平 衡态xe=0,即为状态空间原点; 2) 若该系统在平衡态xe=0的某个邻域上是渐近稳 定的,则一定是大范围渐近稳定的; 3) 对于该线性系统,其李雅普诺夫函数一定可以 选取为二次型函数的形式。
例5-3 试确定用如下状态方程描述的系统的平衡态稳 定性。 2 x1 = x2 − x1 ( x12 + x2 ) ′ 2 x′ = − x1 − x2 ( x12 + x2 ) 2 解: 显然,原点(0,0)是给定系统的唯一平衡态,如果 我们选择正定函数 2 2 V (x) = x1 + x2 为李雅普诺夫函数,那么沿任意轨迹x(t),V(x)对时间 的全导数 2 ′ ′ V ′(x) = 2 x1 x1 + 2 x2 x2 = −2( x12 + x2 ) 2 < 0 是负定函数。此外,当||x||→∞时,必有V(x)→∞。 因此,由定理 定理5-4知,在原点处的平衡态是大范 定理 围一致渐近稳定的。
上述第(3)点可由如下定理中得到说明。 定理5-7 线性定常连续系统 定理 x’=Ax 的平衡态xe=0为渐近稳定的充要条件 充要条件为: 充要条件 对任意给定的一个正定矩阵Q,都存在一个正定 矩阵P为矩阵方程 PA+ATP=-Q 的解,并且正定函数V(x)=xTPx即为系统的一个 李雅普诺夫函数。
解出p11、p12和p22,得
p11 p12 1 3 1 P= = 2 1 2 p12 p22
为了验证对称矩阵P的正定性,用合同变换法 检验如下:
1 3 1 行( 2) −(1) / 3→( 2) 1 9 0 P= ⇒ 2 1 2 列( 2)−(1) / 3→( 2) 6 0 5
由于V’(x)对任意的x≠0恒为零,因此由定理5-5 中2)可知,该系统是李雅普诺夫意义下的稳定, 但非渐近稳定。
(3) 不稳定性定理 定理5-6 设系统的状态方程为x’=f(x,t),其中xe=0为 定理 其平衡态。若存在一个有连续一阶偏导数的正定函 数V(x,t),满足下述条件: 1) V’(x,t)为正定的,则该系统在原点处的平衡态是 不稳定的; 2) 若V’(x,t)为正半定的,且对任意的t0和任意的 x(t0)≠0, V’(x,t)在t>t0时不恒为零,那么该平衡态 xe亦是不稳定的。
定理5-4中严格要求选择的李雅普诺夫函数为正定函 数,其导数为负定函数。 这给该定理的应用,特别是寻找适宜的李雅普 诺夫函数带来一定困难。 下面给出一个定理对上述定理 定理5-4作一补充,以 定理 减弱判别条件。