基于超声波的汽车并线辅助系统设计
基于超声波的汽车防撞系统的设计

基于超声波的汽车防撞系统的设计目录1 绪论 (1)2 课题简介及其发展现状 (3)2.1 课题研究现状及其发展意义 (3)2.2 超声波简介 (4)3 总体设计方案 (5)3.1 设计总体思路概况 (5)3.2 超声波测距原理 (6)3.3 超声波传感器 (7)3.4 控制系统框图 (9)3.5 超声波发射装置设计 (9)3.6 超声波接收装置设计 (11)3.7 温度补偿 (13)3.8 显示电路设计 (14)3.9 报警装置设计 (17)4 软件设计 (18)4.1 软件工作流程 (18)4.2 主程序流程图 (19)4.3 超声波的发生子程序和中断程序 (20)5 硬件设计 (20)5.1 芯片的功能及其测距原理 (21)5.1.1 AT89C51的功能特点 (21)5.1.2 单片机实现测距的原理 (22)5.1.3 系统的特点 (22)5.2 超声波测距系统元器件清单 (23)结束语 (25)参考文献 (26)附录 (20)附录1 汽车防撞测距仪原理图 (24)附录2 程序清单 (25)1 绪论曾几何时,汽车对很多家庭来说是不敢想象的。
但随着社会生产力的发展和经济水平的大幅度提高,百姓的收入日益增加,解决了温饱问题的家庭开始奔向小康,表现最明显的是交通工具的升级换代:一些家庭开始购买汽车作为代步工具。
近几年我国汽车保有量逐年增加,2009年的保有量为6300万辆,2010年达到7400多万辆。
按保守估计,未来国内汽车保有量将达到4.9亿辆左右,即大约350辆/千人。
对于汽车数量的大副度攀升,尽管国家在公路设施上不断地改进,但道路上的车辆仍然还是越来越多,尤其在上下班时段完全避免不了汽车拥挤的现状。
再加上汽车设计中车速的不断提高,虽然公路上各路段都有限速,但撞车事件仍然在广大人民的生活中屡屡发生,给人们带来巨大的人身伤亡和社会财产损失。
针对汽车拥挤的现状,设计一种反应快,稳定性好而且经济实用的汽车防撞测距仪对当今汽车行驶安全现状势在必行。
基于超声波的汽车防撞系统设计.

摘要随着中国工业经济的不断高速发展,汽车行业成为了促进中国经济发展的不可或缺的一部分,近年来我国高速公路追尾碰撞事故频繁发生,而车载追尾碰撞预警系统在解决高速公路行车安全中具有良好的前景,科学技术的快速发展使得超声波技术在汽车领域中的应用越来越广泛。
本文对超声波汽车防撞系统进行了理论分析,利用模拟电子、数字电子、微机接口技术、超声波换能器、以及超声波在介质中的传播特性等知识,采用以stc89c51单片机为核心的低成本、高精度、微型化数字显示超声波测距的硬件电路和软件电路设计方法在此基础上设计了系统的总体方案,最后通过硬件个软件实现各个功能模块。
该设计由超声波发射模块、信号接收模块、单片机处理模块、数码显示以及声光告警显示模块等部分组成,文中详细介绍了测距器的硬件组成、检测原理、方法以及软件结构。
超声波发射模块中采用555定时器构成的时基电路,接收电路使用SONY公司的CX20106A红外检测专用芯片,该芯片常用于38kHz的检波电路,文中通过对芯片内部电路的仔细分析,设计出能够成功对40kHz超声波检波的硬件电路,并且增益可调,与传统超声波检波电路相比,电路变得精简,调试变得相对容易。
测距器使用数码管显示目标物的距离。
为了保证超声波汽车防撞系统的可靠性和稳定性,采取了相应的抗干扰措施。
就超声波的传播特性,超声波换能器的工作特性、超声波发射装置、接收装置、超声微弱信号放大、波形整形、速度变换电路及系统功能软件等做了详细说明.实现障碍物的测距、显示和报警,超声波测距范围0.6-2.0米,精度在10厘米左右。
关键词:汽车防撞报警系统、STC89C51、传感器、LED显示、测量距离AbstractWith the rapid development of China industrial economy, the automotive industry has become an indispensable part of China promote economic development in recent years, the rear end collision accidents occur frequently in China, and the vehicle rear end collision warning system in the settlement of expressway traffic safety has a good prospect, the rapid development of science and technology makes the ultrasonic technology applied in automotive more widely in the field of. This paper analyses the theory of ultrasonic wave automotive collision avoidance system, the use of analog electronics, digital electronics, computer interface technology, ultrasonic transducer, and the ultrasonic propagation in the medium of knowledge, using low cost, usingSTC89C51 microcontroller as the core of the hardware circuit and software design method of the circuit of high precision, miniaturization digital display ultrasonic ranging in on the basis of the overall system design, the hardware software implementation of each functional module.The design is composed of ultrasonic transmitting module, the signal receiving module, microcontroller module, digital display and sound and light alarm display module and other components, this paper introduces in detail the range of hardware devices, measuring principle, method and structure of software. The time base circuit module 555 timer used a special chip CX20106A, ultrasonic, infrared detection receiving circuit using the SONY company, the chip used in the detector circuit 38kHz, careful analysis of the internal circuit in this paper, the hardware circuit design can successfully 40kHz ultrasonic detection, and adjustable gain, compared with the traditional ultrasonic detection circuit, the circuit is simplified, the debugging easier. The range finder using digital tube display distance of object.In order to ensure that the ultrasonic wave automotive collision avoidance system reliability and stability, take the corresponding anti-interference measures. On the ultrasonic propagation characteristics, job characteristics, the ultrasonic transducerultrasonic transmitting device, receiving device, ultrasonic signal amplification and waveform shaping, speed converter circuit and system function of software in detail.The ranging, obstacle of display and alarm, ultrasonic distance measurement range of0.6-2.0 meters, the accuracy of about 10 cm.Keywords: anti-collision alarm system, STC89C51, sensor, LED display, measuring the distance of car目录摘要..................................................................................................错误!未定义书签。
基于超声波测距的汽车倒车防撞报警系统设计
基于超声波测距的汽车倒车防撞报警系统设计一、本文概述本文针对汽车安全驾驶领域的重要需求,详细探讨并设计了一种基于超声波测距技术的汽车倒车防撞报警系统。
随着城市交通环境复杂性的增加以及人们对行车安全意识的提高,如何有效防止因驾驶员视线盲区和操作失误引起的倒车碰撞事故成为研究热点。
本系统利用超声波传感器作为主要探测元件,通过发射和接收超声波信号来精确测量车辆与后方障碍物之间的实时距离,并结合智能算法分析处理这些数据,以便在车辆靠近障碍物到危险距离时及时发出报警提示,辅助驾驶员做出正确决策,从而显著提升倒车安全性。
文章首先阐述了该系统的背景意义和技术原理,随后深入剖析超声波测距方法及其在汽车应用中的优势和挑战接着,详细介绍了系统架构设计,包括硬件组成(如超声波传感器模块、信号处理电路、报警装置等)及软件算法实现通过实验验证了系统的性能指标,探讨其在不同工况下的稳定性和准确性,并对未来可能的优化方向进行了展望。
通过本文的研究,期望能为汽车主动安全技术的发展贡献一份力量,推动相关产品的实际应用与普及。
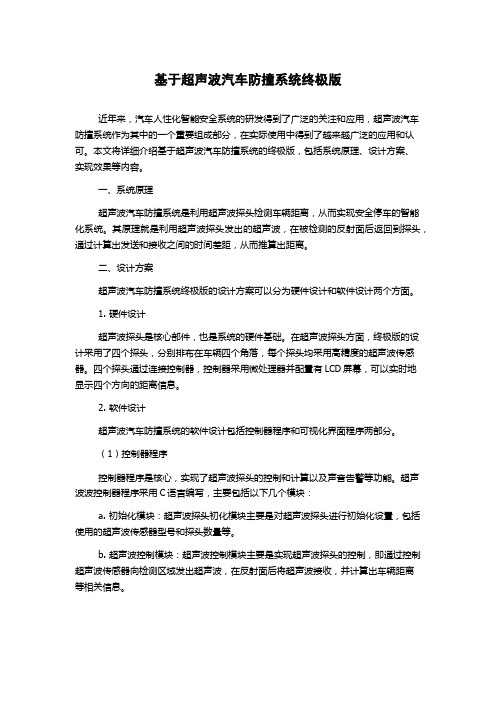
二、超声波测距原理及技术超声波测距技术是利用超声波在空气中的传播特性来实现距离测量的方法。
超声波是一种频率高于人耳能听到的上限(约20kHz)的声波,它在空气中的传播速度相对恒定,约为343米秒。
这一特性使得超声波非常适合用于精确的距离测量。
超声波测距的基本原理是发射器发射出一定频率的超声波,当这些波遇到障碍物时会发生反射,反射波被接收器接收。
通过测量超声波发射和接收之间的时间差,可以计算出超声波传播的距离。
由于超声波的传播速度是已知的,因此可以通过以下公式计算距离:这里的“时间差 2”是因为超声波需要从发射器传播到障碍物,再从障碍物反射回接收器,所以总时间是往返时间。
在汽车倒车防撞报警系统中,超声波传感器通常被安装在汽车的尾部。
当驾驶员开始倒车时,系统会自动激活传感器,传感器开始发射超声波。
超声波遇到车辆后方的障碍物时反射回来,被传感器接收。
汽车超声波雷达辅助泊车系统开发
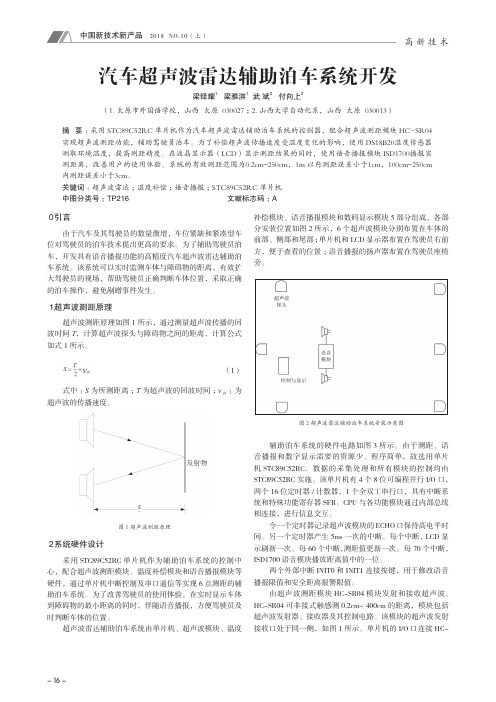
图 3 硬件电路
SR04 的控制端 Trig 口,给 Trig 一个至少 10μs 的高电平触发 SS)。在 SPI 模式下,用户可以对任意存储地址进行录放,故
测距,HC-SR04 模块自动发射 8 个 40kHz 的方波,并自动检 逐个在地址内录入“0”、“1”、“2”、“3”、“4”、“5”、“6”、
令一个定时器记录超声波模块的 ECHO 口保持高电平时 间。另一个定时器产生 5ms 一次的中断。每个中断,LCD 显 示刷新一次。每 60 个中断,测距值更新一次。每 70 个中断, ISD1700 语音模块播放距离值中的一位。
两个外部中断 INIT0 和 INIT1 连接按键,用于修改语音 播报限值和安全距离报警限值。
1 超声波测距原理
超声波测距原理如图 1 所示,通过测量超声波传播的回 波时间 T,计算超声波探头与障碍物之间的距离,计算公式 如式 1 所示。
补偿模块、语音播报模块和数码显示模块 5 部分组成,各部 分安装位置如图 2 所示,6 个超声波模块分别布置在车体的 前部、侧部和尾部;单片机和 LCD 显示器布置在驾驶员右前 方,便于查看的位置 ;语音播报的扬声器布置在驾驶员座椅 旁。
内测距误差小于3cm。
关键词 :超声波雷达 ;温度补偿 ;语音播报 ;STC89C52RC 单片机
中图分类号 :TP216
文献标志码 :A
0 引言
由于汽车及其驾驶员的数量激增,车位紧缺和紧凑型车 位对驾驶员的泊车技术提出更高的要求。为了辅助驾驶员泊 车,开发具有语音播报功能的高精度汽车超声波雷达辅助泊 车系统。该系统可以实时监测车体与障碍物的距离,有效扩 大驾驶员的视场,帮助驾驶员正确判断车体位置,采取正确 的泊车操作,避免剐蹭事件发生。
基于超声波的全自动平行泊车路径规划

开启泊车系统
搜索目标车位
否
泊车位大小
规划泊车轨迹
控制泊车轨迹
否
到达目标车位
结束泊车
关闭系统
1全自动平行泊车系统流程
超声波探测理论分析
超声测距按照内部原理的不同,包括共振式和脉冲反射式两种。
车辆对其有特殊要求,因此一般都使用脉冲反也就是借助超声的反射特点进行探测。
其操作原理主要是借助超声波的传感器,对具体位置发射超声波,时开始自动计时操作,传播超声波,当超声波遇到障碍时会折返回给超声波接收器,接收器收到后会停止工作。
影响超声波的传播速度主要是环境的温度和湿度,
产生不同的测量结果。
路径规划
如果不把汽车后轮侧滑的情况考虑在内,
15
10
5
20151050510
5
10
15
图2探测范围
入位,并且还会有碰撞的危险。
一旦车辆和障碍物之间距离过小,低于安全距离而发生碰撞时,即便采用超声波探测,车辆也很难迅速做出反应,因此只能做出紧急制动,从而完成泊车过程。
为了解决这个问题,从而尽力保证不发生车辆碰撞的问题,全自动泊车系统会根据车辆和障碍物的情况做出判断,对路线进行安排,从而确保车辆完成停车入位。
在对自动平行路径进行规划时,也有静态和动态两种不同方式,笔者认为可以将二者相结合。
常规的泊车一般使用静态泊车路径,从而避免碰撞的情况出现,全自动泊车系统则按照具体情况,对碰撞的边界做出测量,并且划。
基于超声波汽车防撞系统终极版
基于超声波汽车防撞系统终极版近年来,汽车人性化智能安全系统的研发得到了广泛的关注和应用,超声波汽车防撞系统作为其中的一个重要组成部分,在实际使用中得到了越来越广泛的应用和认可。
本文将详细介绍基于超声波汽车防撞系统的终极版,包括系统原理、设计方案、实现效果等内容。
一、系统原理超声波汽车防撞系统是利用超声波探头检测车辆距离,从而实现安全停车的智能化系统。
其原理就是利用超声波探头发出的超声波,在被检测的反射面后返回到探头,通过计算出发送和接收之间的时间差距,从而推算出距离。
二、设计方案超声波汽车防撞系统终极版的设计方案可以分为硬件设计和软件设计两个方面。
1. 硬件设计超声波探头是核心部件,也是系统的硬件基础。
在超声波探头方面,终极版的设计采用了四个探头,分别排布在车辆四个角落,每个探头均采用高精度的超声波传感器。
四个探头通过连接控制器,控制器采用微处理器并配置有LCD屏幕,可以实时地显示四个方向的距离信息。
2. 软件设计超声波汽车防撞系统的软件设计包括控制器程序和可视化界面程序两部分。
(1)控制器程序控制器程序是核心,实现了超声波探头的控制和计算以及声音告警等功能。
超声波波控制器程序采用C语言编写,主要包括以下几个模块:a. 初始化模块:超声波探头初化模块主要是对超声波探头进行初始化设置,包括使用的超声波传感器型号和探头数量等。
b. 超声波控制模块:超声波控制模块主要是实现超声波探头的控制,即通过控制超声波传感器向检测区域发出超声波,在反射面后将超声波接收,并计算出车辆距离等相关信息。
c. 距离计算模块:距离计算模块主要是用于计算车辆距离的具体算法,可以通过采用常规的时间乘以声速计算距离。
通过计算出的距离值,程序可以判断是否需要发出声音告警。
d. 声音告警模块:声音告警模块是超声波防撞系统最为重要的模块之一,其主要功能是通过超声波探头检测到距离过近时(一般默认安全距离为30cm)向驾驶员发出警告信号。
基于超声波定位原理的停车辅助系统设计

课程设计名称:智能仪器设计题目:基于超声波定位原理的停车辅助系统学期: 2014-2015学年第二学期专业:测控技术与仪器班级:测控12-2姓名:王治国学号: 1205070219指导教师:李雅梅智能仪器设计课程设计成绩评定表课程设计任务书一、设计题目基于超声波定位原理的停车辅助系统二、设计任务(1) 根据超声波测距原理,设计出系统的硬件电路图。
(2) 实现超声波的发送与接收,从而实现利用超声波方法测量物体间的距离。
(3) 以数字的形式显示测量距离。
(4) 在距离小于50cm时发出报警。
三、设计计划本设计共3周。
第1周:针对选题查资料,确定设计方案;第2周:方案分析比较,电路原理设计,进行元器件及参数选择;利用Altium Designer 进行电路图绘制第3周:编写主程序流程图和软件程序及编写整理设计报告。
四、设计要求1、绘制软件流程图并利用汇编语言编写软件程序;2、绘制系统硬件原理图;3、形成设计报告。
指导教师:李雅梅教研室主任:李雅梅2015年5月26 日摘要随着社会经济的发展和交通运输业的不断兴旺,汽车的数量在不断的增加。
交通拥挤状况也日益严重,撞车事件也经常发生,造成了很多不可避免的人声伤亡和经济损失,面对这种情况,设计一种响应快、可靠性高并且比较经济的汽车防撞预警系统显得非常的重要。
超声波测距法是一种最常见的距离测量方法。
本文介绍的就是利用超声波测距法设计一种倒车防撞报警系统。
本文的内容是基于超声波测距的倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89S51单片机结合于一体,设计出一种基于AT89S51单片机得倒车防撞系统。
本系统采用软硬结合的方法,具有模块化和多用化的特点。
论文概述了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。
对于系统的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统的总体构成。
通过多种发射接收电路设计方案比较,得出了最佳设计方案,并对系统各个设计单元的原理进行了介绍。
吴楠基于超声波检测的防撞系统设计

毕业设计任务书(理工)
学院
计算机学院
学生姓名
吴楠
专业
通信工程
班级
通信0903
学号
0911052081
指导教师
柳兆军
职称
讲师
课题名称
基于超声波检测的防撞系统设计
起止日期
自2013年3月4日起至2013年6月19日
一、课题来源、目的与要求:
课题来源:联系生产实际。
目的与要求:超声波定向性好、能量集中、传输过程中衰减较小、反射能力较强。利用超声波测速、测距从而实现移动物体的防碰撞系统。超声波测距迅速、方便,且不受光线等因素影响,广泛应用于水文液位测量、建筑施工工地的测量、现场的位置监控、车辆倒车障碍物的检测、移动机器入探测定位等领域。本课题要求完成以单片机控制核心的超声波检测的防撞系统设计。
指导教师(签字):
Hale Waihona Puke 20年月日系主任(签字):
20年月日
二、主要设计内容:
1、单片机最小系统设计;
2、超声波发生发送模块设计;
3、超声波接收模块设计;
4、输出模块(显示及提示音)设计;
5、提交设计成果:设计成果及20000字以上毕业论文,翻译5000字以上的外文资料。
三、主要设计技术指标与参数:
1、测量范围:0.4 ~ 15m;
2、分辨率:0.01m;
3、最大测量距离:15m;
五、主要参考文献资料:
1、单片机原理与应用刘华东主编电子工业出版社。
2、通信原理(第五版)樊昌信国防工业出版社。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
The
系统
图1
Figure 1
系统原理:由STCl2C5A60S2单片机控制超声波传感器。单片机 通过P2.0、P2.1作为IIC通信的总线从超声波收发模块(KSl03)中读 出相邻车道后方车辆与本车的车距。单片机将读取到的数据与预置的 安全距离比较,判断是否需要发出报警信号。 3.2超声波发射与接收模块 本系统测距部分采用超声波测距模块(KSl03).此模块具有实时 温度补偿距离探测功能.大大降低了因环境温度影响而带来的测量误 差.探测范围lcm—1000em(10米)。KSl03使用IIC总线与主机进行通 信.自动响应主机的IIc控制命令.扩展对其他方向车辆的监视也简 单的多.以致占用单片机的资源和I/O 1:3大大减少.KSl03还具有探 测频率高、工作电压宽、功耗低等特点。因此KSl03能较好的应用于 汽车并线辅助系统. 3.3单片机控制电路 超声波发射与接收模块输出的回响信号从单片机的INT0输入由 定时器来测量高电平时间(超声波传播的时间)。单片机利用时间计算 出距离并与预置的安全距离进行比较,如果需要报警.单片机将通过 P1.1和P1.2分别控制蜂鸣器发声(距离越近音量越大)和红色LED 灯闪烁(距离越近亮度越大)同。 3.4报警电路 报警电路部分主要由蜂鸣器和LED灯组成。硬件电路如图2所 示.在汽车并线的过程中.利用单片机产生一定频率的方波信号来驱
辅助素统实现方法.利用超声波的原理,采用单片机为主控制器设计了一套系统。此系统用来检测当驾驶员准备并线或者超车时,汽车后视镜
盲区及周边地区是否有车辆行驶.当与相邻的车道车辆的车距小于汽车并线安全距离时,车辆会主动发出声光报警提醒驾驶员。此系统对汽车 安全行驶能起到一定的辅助作用。 【关键词】并线辅助;超声波;安全驾驶
播的速度为340m/s.由计时器记录的时间t,并可计算发射点距离被 测物体的距离S,即s=340眈【卅。
3系统硬件设计
3.1系统的整体设计方案 系统的整体方框图如图1所示。系统硬件部分主要由 STCl2C5A60S2单片机系统、报警电路、超声波发射与接收电路、电源 电路四大部分构成。
l艚蝴卜
l电源电路卜—一
4系统的软件设计
汽车并线辅助系统根据超声波测距原理.用STCl2C5A60S2系列 单片机开g己设计。整个软件部分采用前后台多任务程序设计,由主程 序、超声波测距子程序、报警子程序等任务组成。
断.即便安装了并线辅助系统或者其他辅助系统,驾驶员仍然需要时 刻保持安全意识,亲自观看两侧后视镜以及观察交通状况旧。●良
动蜂鸣器发声和LED灯闪烁。当相邻后方的车辆距离大于安全距离
※基金项目:校级大学生研究性学习与创新性实验计划项目。
作者简介:罗=童.-钧(1992--),男,湖南邵阳人,湖南工业大学2011级本科生。
science&Tech矗1。g)r Visi。n科技视界l
33
万方数据
Science&Technology Vision
[5]高川磁振藩.基于AT89C2051的超声波测距系统叨应用科技,2006(11).
【6]陆明辉.奥迪Q7驾驶辅助系统之换道系统叨.汽车电器,2008(10). 图3
Figure 3
[责任编辑:曹明明】
f上接第25页)产品在市场竞争中超越了众多对手,引领了消费时尚
授权等方式进行技术引进.更要大力增加对引进技术的消化吸收再创 新投入.开展技术上的自主创新,打造属于自己的核心技术优势。 5.3实施与市场、技术动态匹配的产品开发战略 理性地评估不断变化的企业内外环境.系统分析企业的比较优势 和比较劣势.发现新的机遇,即通过认真观察研究外部环境,满足消费
口墨E圈E雹
科技视界
函国圈
时,进行下次测量,不发报警信号。当相邻后方的事辆距离大于安全距
离(本系统设置安全距离为8m)时,发出报警信号并通过控制方波的
频率和占空比分别来控制蜂鸣器的音量和红色LED灯的亮度.距离 越近音量和亮度均越大口I。
主程序流程图如图3所示。软件设计的主体思路是采用前后台任 务模式,将测距和报警编成独立任务的形式.每隔一定的时间运行一 次。其他时间单片机进入低功耗模式,降低整个系统的功耗。单片机启 动并开始初始化配置,包括配置超声波测距模块的工作模式、定时器 初始化配置。定时lOOms则开始依次执行超声波测距任务、报警任务。 超声波测距子程序设计为进入该任务后并开始通过IIC通信读 取测距模块中的数据、处理数据。再次发出探测指令。因为KSl03在 发送探测指令后要等待87ms。而下一次进入该任务是100ms以后.满
者大量需求.来发现、开拓未开发的和未知的市场。企业应正确把握市
场、产品和技术的动态匹配,必要时调整公司的整体谋划和战略,采取 “有所为有所不为”的做法.甩掉不赚钱的业务板块和“寄生公司”,集 中企业的有效资源发展优势产业,寻找突破IZl,扬长避短,全力打造具 有竞争优势的核心产业。 5.4大力开展以市场为导向的产品设计创新 一个企业仅仅重视技术创新是不够的,还需要在产品功能设计、 外观设计上的与众不同。独特的应用设计能力,往往是取胜市场的关 键能力之一。三星的实践充分证明了这一点。因此,我国企业必须将应 用设计创新能力.提高到战略高度来重视,独自或合作成立面向全球 的创新设计机构.并努力建立全球设计网络,推行高端品牌路线。融合 了先进技术、一流材质和时尚设计的产品才能在市场竞争中超越众多 对手.引领消费时尚和消费潮流。赢得客户的认同和喜爱。 5.5开展持续的国际化品牌建设.实现与技术创新的良性互动 中国企业必须要放眼全球,开展持续的国际化品牌建设,打造国 际化品牌。国际化品牌的实现路径大致为:产品及工艺研究开发与创 新一形成自有品牌:竞争性产品的研究开发一形成自有风格品牌;核 心技术研究开发和自主创新一形成国际化自有品牌。企业拥有了国际 一流品牌。才能在全球范围内进行有效竞争并做大做强。而且,追求国 际化品牌会成为企业技术创新的内在驱动力,品牌的成功带来的丰厚 利润也为技术创新提供了必要的物质保障,技术领先又巩固了品牌的
Design of vehicle line-change assistant LUO
system?based
on
Ultrasonic
Wen-jan
ZHANG Liu-yu
LIU Bing—chuan
ZHOU
Jun
important part of vehicle
a
(School of Electrical and Information Engineer,Hunan University of Technology,Zhuzhou Hunan 412007,China)
technoloP:y,this
new
method
to
realize the function
with
of
ultrasonic,designed
car
system
in
single
chip
microcomputer.This svstem is used and the suHounding light alarm
【Abstract]The
safetv
the safety of driving has been pay more attention to,while pape。presents
to
a
car
line-change assistant systems as the principle
to
an
active
罄
足等待时间的要求。这样就比用delayO;延时更加节约资源。
报警子程序设计为进入任务后将安全距离与探测距离作差.根据 结果区分相邻车道后方的车辆相对于本车的位置。从而判断是否发出
图2
Figure 2
报警信号以及报警信号的音量和亮度。
5小结
利用Sl系列单片机设计汽车并线辅助系统,系统简单.测量准 确,工作稳定。在本设计中采用超声波测距模块(KSl03)。带温度补 偿.精度高。采用Ⅱc总线直接与主机进行通信,比用单片机直接计时 测量的精度要高。但需要注意的是:超声波测距模块必须与汽车成 200左右的夹角.才能充分检测盲区。然而,驾驶员必须注意.汽车并线 辅助系统所起到的仅仅是辅助作用.仍然无法完全替代驾驶员作出判
STCl2C5A6 0S2单片机
1汽车后视镜盲区
根据光学原理.可以容易地计算出车辆后视镜的视角.角度确定 后就能按比例准确地画出盲区。选择一辆中等大小的乘用车.测量其 镜面宽度,曲面镜的曲率半径,眼睛到镜子的纵向和横向距离。驾驶员 的座椅分别调到最前面、中间、最后面分别进行测量。后视镜的视角如 表1所示,表1中间位置的视角用来描绘平均身高驾驶员的视角¨】。 表1双目视角
和消费潮流赢得了客户的认同和喜爱,直接促进了品牌价值的提升。
4.2持续的国际化品牌建设 追求国际化品牌以及持续的国际化品牌建设,是三星成功转型升 级的关键所在。三星依靠全球化的品牌战略管理,凭借产品领导性、系 统性的品牌管理和差异化营销模式,使三星品牌迅速成功,近20项产 品做到了世界第一.成为超越日本索尼的国际一流品牌。三星的国际
binocular visual angle
单位:(。)
所处位置 一 日U 中 后 内后视镜
31.9 28.9
25.7
左侧外后视镜
18.3 16.6
15 l
右侧外后视镜
19.1 19.0 18.9
2超声波传感器及其测距原理
2.1超声波传感器 超声波传感器测距是一种非接触式的测量方式.由于超声波指向 性强,能量消耗缓慢.在介质中传播的距离较远,因而超声波经常被用 于距离的测量。它不受被测对象的颜色、表面灰垢等影响.特别是能够 在黑暗的环境中完成测量任务。对环境有较强的适应能力.因此能够 较好的应用于汽车并线辅助系统的测量任务。 2.2超声波测距原理 超声波测距的工作原理是利用超声波发射器向某一个方向发送超 声波,同时开始计时,超声波在空气中传播。当碰到物体时马上返回。 当超声波接收器收到超声波时立即停止计时。已知超声波在空气中传