3.3 线性时变连续系统状态方程的解
【武汉大学】线性系统状态空间表达式的解【现代控制理论】

• 这里定义的状态转移矩阵与前面定义的是一致的。
– 引入上述状态转移矩阵新定义,主要是为了使状态转移 矩阵的概念易于推广到时变系统、离散系统等,
– 使得有可能对各种类型系统的状态方程的解作统一描 述,更好地刻划系统状态运动变化的规律。
现代控制理论
武汉大学 自动化系 丁李
3.1.2.1状态转移矩阵基本定义
现代控制理论
武汉大学 自动化系 丁李
3.1.1.2拉氏变换法
– 对上式取拉氏反变换,即得齐次状态方程的解为
x(t)=L-1[(sI-A)-1]x0 – 下面讨论如何求解拉氏反变换L-1[(sI-A)-1]。
• 主要思想为将标量函数的拉氏变换与反变换平行推 广至矩阵函数中。
• 对标量函数,我们有
(s a)1 1 a a2 ... ak1 ...
• 由常微分方程理论知,该方程的解连续可微。 – 因此,该解经泰勒展开可表征为无穷级数,即有
x(t) q0 q1t q2t 2 qkt k
式中,qk(k=1,2,...)为待定级数展开系数。
现代控制理论
武汉大学 自动化系 丁李
3.1.1.1级数展开法
– 将所设解代入该微分方程,可得
(2) 计算矩阵指数函数eAt。
e At L1[(sI A)1]
L1
s
2
1 2
s
1
2 2
s 1 s 2
1 1 s 1 s 2 1 2
s 1 s 2
2et 2et
e2t 2e2t
et e2t
3.1.1 线性定常齐次状态方程的解
现代控制理论-状态方程的解

3、复频域上
非齐次状态方程的解
2、说明
e At 状态转移矩阵
一般用 t 表示,即 t e At
考虑初始条件拉氏变换
sX ( s ) X (0 ) AX ( s ) BU ( s ) 有 ( sI A) 1 X ( s ) X ( 0 ) BU ( s ) 即 1 X ( s ) ( sI A) X (0) ( sI A) 1 BU ( s ) 则
e
d At e Ae At e At A dt
At 1
e At
[5]、对于 n n的方阵 A、 B 当且仅当 AB BA时 有 e At e Bt e( A B)t , 而当AB BA, e At e Bt e( A B)t。
电气工程学院
几个特殊的矩阵指数eAt
设单变量系统的差分方程为:
y(k n) an1 y(k n 1) a0 y(k ) bnu(k n) bn1u(k n 1) b0u(k )
相应的系统脉冲传递函数为
bn z n bn 1 z n 1 b1 z b0 G( z ) n z an 1 z n 1 a1 z a0
有
d At At AX ] e X e [X dt e At Bu(t )
考虑初始条件 拉氏变换得 sX ( s ) X ( 0 ) AX ( s )
将上式积分有 t t X (t ) 1 ( sI A) 1 X (0) A d A e Bu( ) d d e X ( ) 0 0 d 1 显然 e At 1 t ( sI A) At A X ( 0 ) e X ( t ) e 可得 At Bu( )d
连续系统的状态方程 -回复

连续系统的状态方程是什么
连续系统的状态方程描述了系统的动态行为,通常以微分方程形式表示。
对于线性时间不变系统,连续系统的状态方程可以用以下一阶常微分方程表示:
dx(t)/dt = A * x(t) + B * u(t)
其中:
- x(t) 是系统的状态向量,它包含了描述系统状态的变量。
每个变量代表系统的一个状态,如位置、速度、温度等。
- t 是时间变量,表示系统运行的时间。
- dx(t)/dt 是状态向量x(t) 关于时间t 的导数,表示状态的变化率。
- A 是系统的状态矩阵,描述了状态变量之间的关系和状态变化的规律。
- B 是输入矩阵,描述了外部输入u(t) 对系统状态的影响。
上述方程表示了状态向量x(t) 随时间t 的变化情况。
右侧第一项A * x(t) 表示系统自身状态对状态变量的影响,而右侧第二项B * u(t) 表示外部输入u(t) 对状态变量的影响。
需要注意的是,上述方程是线性时间不变系统的状态方程。
对于非线性或时变系统,状态方程的形式可能更加复杂,可能包含更高阶的微分项或非线性函数。
控制系统的能控性和能观性

为非奇异时, 列矢量是线性无关的。现在
3.6 能控性与能观性的对偶关系
能控性与能观性有其内在关系,这种关系是由卡尔曼提出的对偶原理确定的,利用对 偶关系可以把对系统能控性分析转化为对其对偶系统能观性的分析。从而也沟通了最优控 制问题和最优估计问题之间的关系。
3.6.1 线性系统的对偶关系 有两个系统,一个系统 为:
3.9 传递函数阵的实现问题
3.9.1 实现问题的基本概念 对于给定传递函数阵 W(s),若有一状态空间表达式∑:
(12)
3.7.2 单输出系统的能观标准型 与变换为能控标准型的条件相似,只有当系统是状态完全能观时,即 有:
系统的状态空间表达式才可能导出能观标准型。 状态空间表达式的能观标准型也有两种形式,能观标准 型和能观标 准 型,它们分别与能控标准 型和能控标准 型相对偶。
1.能观标准 型 若线性定常系统:
维不能观测的子系统,便得
和不能观的
,维子系统:
非奇异变换阵 是这样构 成的,取
(14)
3.8.3 按能控性和能观性进行分解
1)如果线性系统是不完全能控和不完全能观的,若对该系统同时按能 控性和能观性进行分解,则可以把系统分解成能控且能观、能控不能观、 不能控能观、不能控不能观四部分。当然,并非所有系统都能分解成有这 四个部分的。
2.线性连续时变系统能观性判别 时变系统
(4)
在
上状态完全能观测的充分必要条件是格拉姆矩阵
(5) 为非奇异的。
3.5.3 连续时变系统可控性和可观性判别法则和连续定常系统的 判别法之间的关系
众所周知,一 个矩阵:
因此,有 这个矩阵的列矢量线 性无关与 非
奇异等价。
式中,
为列矢量,当且仅当由
[东北大学][现代控制理论][03][状态方程的解]PPT课件
![[东北大学][现代控制理论][03][状态方程的解]PPT课件](https://img.taocdn.com/s3/m/74f1d74d6edb6f1afe001f27.png)
A t n
n!
x
t0
A
n0
At
n!
n
x
t
0
Axt;
级数
n0
At n
n!
x
t0
绝对一致收敛
矩阵级数 eAt At n 称为矩阵指数
n0 n!
3
2005-11-5
第三章 状态方程的解
例3.1.1 已知 A 解:
0 1 , 求 e At. 10
e A t 1 01 0 0 t 0 t 2 1 ! 0 t2 0 t2 3 1 ! t0 3 0 t3
2005-11-5
第三章 状态方程的解
则有:
eAt
L1
21 s1 s2
11 s1 s2
s21s22 s11s22
2et e2t
et
15
2005-11-5
第三章 状态方程的解 (3) 标准型法:
a . 设 A 具有n 个互异的特征值 1,2,
n, 则有
e1t
e2t
eAt P
0
0 P1
ent
其中 P 满足 P1APdiag[,, ,n].
16
2005-11-5
第三章 状态方程的解
例3.2.2 已知矩阵
0 1 1
A
6
-11
6
-6 -11 5
试计算矩阵指数 e A t .
解: 1) 特征值
1 1
IA6 -11 61230
eAt IAt1A2t2 2!
1
=
1
0
0 1
2
1
12
1 2!
22
0
0
t2
状态空间表达式解
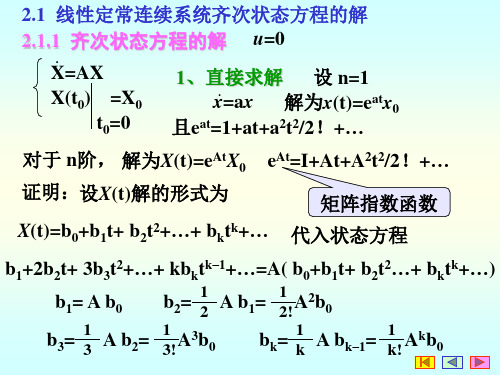
2.1.1 齐次状态方程的解 u=0
X·=AX
1、直接求解 设 n=1
X(t0) =X0
x·=ax 解为x(t)=eatx0
t0=0 且eat=1+at+a2t2/2!+…
对于 n阶, 解为X(t)=eAtX0 eAt=I+At+A2t2/2!+…
证明:设X(t)解的形式为
=(I+At1+A2t12/2!+…) (I+At2+A2t22/2!+…) = (t1) (t2)
1、状态转移矩阵的性质:设t0=0 (4)[(t)]–1= (–t)
证明:由 (1)(0)=I (3) (t1+t2)= (t1) (t2) 得 (t–t)= (t) (–t)=I
(–t +t)= (–t) (t) =I 所以 [(t)]–1= (–t) (5) (t2– t1) (t1– t0) = (t2– t0)
0 0 0… 0 0 0…
e1t tm–1/(m–1)! e1t tm–2/(m–2)!
Q–1 te1t e1t
以A有三重特征值为例进行证明
1 1 0 J= Q–1AQ= 0 1 1
0 0 1
证明 eAt=I+At+A2t2/2!+… 则 Q–1eAtQ=Q–1IQ+ Q–1 AtQ+ Q–1 A2t2/2!Q+… =I+ Jt+ J2t2/2!+… eAt=Q(I+ Jt+ J2t2/2!+…) Q–1
1 k!
Akb0
2.1.1 齐次状态方程的解
第三章状态方程的解课堂课资
e2t 1 3t et
2e2t
2
3t
et
4e2t 5 3t et
0 1 0
A
0
0
1
6 11 6
1 1 1 P 1 2 3
1 4 9
6 5 1
P 1
1 2
6
8
2
2 3 1
1 0 0
A
P1 AP
0
2
0
0 0 3
et 0 0
e At PeAt P1 P 0 e2t
0
e
nt
eT 1ATt I T 1 ATt 1 T 1 A2Tt 2 1 T 1 A3Tt 3
2!
3!
T 1 I At 1 A2t 2 1 A3t 3 T
2!
3!
T 1e AtT et
e At TetT 1
12
例 已知矩阵
0 1 1
A 6
-11
6
试计算矩阵指数 eAt .
a n1 n1 1
e1t
a n1 n1 2
e2t
a0 a1n
a0
1
an1 1
a n1 n1 n
ent
n1 1
1
e1t
.
n1 n
ent
17
2)有 n个重特征值 1 n
et a0 t a1 t an1 t n1
两端对求1至n 阶1 导数得:
t 是满足 t At,0 I 的 n n 的矩阵。 t 定义为转移矩阵。
对于线性定常方程 t e At 。
t e At 表示 x(0) 到 x(t) 的转移矩阵。 t t0 e A(tt0 ) 表示 x(t0 ) 到 x(t) 的转移矩阵。
求状态方程的时域解

求状态方程的时域解状态方程(State Equation)是描述动态系统的数学模型,它能够描述系统的状态如何随时间变化。
在控制论中,求解状态方程的时域解在设计和分析控制系统中具有重要意义。
本文将介绍状态方程的定义、求解方法以及时域解的计算过程。
状态方程的定义状态方程是用微分方程的形式表示的动态系统。
一般形式的状态方程可以表示为:dx(t)/dt = A(t) * x(t) + B(t) * u(t)其中,x(t)是状态向量,表示系统在时间t的状态,u(t)是输入向量,表示在时间t的输入,A(t)和B(t)是矩阵,它们表示系统的动态特性。
该方程描述了系统状态的变化率以及输入对状态的影响。
解法求解状态方程的时域解需要通过求解微分方程来获取。
具体的解法主要有两种:利用拉普拉斯变换求解和利用差分方程求解。
1. 利用拉普拉斯变换求解在连续时间域中,可以利用拉普拉斯变换来求解状态方程的时域解。
具体步骤如下:1.将状态方程中的微分方程用拉普拉斯变换转换为代数方程。
2.根据已知的初始条件,建立方程的初始条件。
3.根据所求解的变量进行移项整理,求解出未知变量的表达式。
4.对拉普拉斯域变换的结果进行逆变换,得到时域解。
2. 利用差分方程求解在离散时间域中,可以利用差分方程来求解状态方程的时域解。
具体步骤如下:1.将状态方程中的微分方程用差分方程转换为代数方程。
2.根据已知的初始条件,建立方程的初始条件。
3.根据差分方程的表达形式,利用递推关系计算出未知变量的取值。
4.得到差分方程的解,并将其转换为时域解。
时域解的计算过程下面将以连续时间域为例,介绍求解状态方程的时域解的计算过程。
1. 利用拉普拉斯变换求解假设我们有一个一阶线性连续时间不变系统,状态方程为:dx(t)/dt = A * x(t) + B * u(t)其中x(t)是一个列向量,u(t)是输入的标量,A和B是常数矩阵。
首先,我们将方程两边进行拉普拉斯变换,得到:sX(s) - x(0) = A * X(s) + B * U(s)其中X(s)和U(s)是x(t)和u(t)的拉普拉斯变换,s是拉普拉斯变换的复变量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录(1/1)
ቤተ መጻሕፍቲ ባይዱ
目 录
� � � � � � � � 概述 3.1 线性定常连续系统状态方程的解 3.2 状态转移矩阵及其计算 3.3 线性时变连续系统状态方程的解 3.4 线性定常连续系统的离散化 3.5 线性定常离散系统状态方程的解 3.6 Matlab问题 本章小结
状态转移矩阵的性质 (4/8)
4) 对角线矩阵的状态转移矩阵。 如果时变的系统矩阵A(t) 如下表示的对角线矩阵。 A(t)=diag{a11(t) a22(t) … ann(t)} 式中,aii(t)(i=1,2,…,n)为标量函数,则A(t)的状态转移矩阵Φ (t,t0)为如下对角线矩阵。 Φ(t,t0)=diag{ϕ11(t,t0) ϕ22(t,t0) … ϕnn(t,t0)} 式中 , ϕii(t,t0)(i=1,2,…,n) 为满足如下标量微分方程的状态转 移函数
Φ (t , t0 ) = I + ∫ A(τ1 )Φ (τ1 , t0 )dτ1
t0 t
状态转移矩阵的求解(2/7)
Φ(t , t0 ) = I + ∫ A(τ 1 ) Φ(τ 1 , t 0 )dτ 1
t0 t
� 如果将上式中积分号内的Φ(τ1,t0)再按上式展开,则有
Φ(τ1 , t0 ) = I + ∫ A(τ 2 )Φ(τ 2 , t0 )dτ 2
̇ ( t , t ) = A ( t ) Φ (t , t ) ⎧Φ i 0 i i 0 ⎨ ⎩ Φ i (t 0 , t 0 ) = I
i = 1, 2,..., l
—例 3-9 6/8)— 状态转移矩阵的性质(6/8)
9 求如下时变系统的状态转移矩阵Φ(t,t0)。 � 例33-9
⎡ 0 ̇=⎢ x ⎢ ⎣0 1 ⎤ x (t + 1)2 ⎥ ⎥ 0 ⎦
—例 3-9 7/8)— 状态转移矩阵的性质(7/8)
� 因此
A(t1)A(t2)=A(t2)A(t1) ∀t1,t2
即矩阵A(t)和∫A(τ)dτ与满足可交换条件,可由指数展开式方 法计算状态转移矩阵,即
t ⎡ Φ (t , t0 ) = exp ∫ A(τ )dτ ⎤ ⎢ ⎥ ⎣ t0 ⎦
1 ⎤ ⎡ ⎡ 1 ⎤ ⎤ ⎡ 0 0 t 1 ⎥ +⋯ 2⎥ ⎢ (τ + 1)2 ⎥ dτ + ⎢ ( τ + 1) =I+∫ ⎢ d τ t0 ⎢ ⎥ ⎥ ⎥ 2! ⎢ ∫t0 ⎢ ⎢ ⎢ 0 ⎥ 0 ⎥ ⎣0 ⎦ ⎣0 ⎦ ⎥ ⎣ ⎢ ⎦
故有 Φ(t2,t0)x(t0)=Φ(t2,t1)Φ(t1,t0)x(t0) 由于上式对任意初始状态x(t0)都成立,所以有 Φ(t2,t0)=Φ(t2,t1)Φ(t1,t0)
状态转移矩阵的性质 (3/8)
3) 可逆性 Φ-1(t,t0)=Φ(t0,t) 证明 由性质1)和2),有 Φ(t,t0)Φ(t0,t)=Φ(t,t)=I 故Φ-1(t,t0)=Φ(t0,t)成立。
2) (1/2) 线性时变连续系统状态方程的解(1/
3.3 线性时变连续系统状态方程的解
� 严格说来,实际控制对象都是时变系统,其系统结构或参数随 时间变化。 � 如电机的温升导致电阻以及系统的数学模型变化;电子 器件的老化使其特性也发生变化; � 火箭燃料的消耗导致其质量以及运动方程的参数的 变化等。 � 但是,由于时变系统的数学模型较复杂,且不易于系统分 析、优化和控制,因此只要实际工程允许,都可将慢时变 系统在一定范围内近似地作为定常系统处理。 � 但对控制目标要求较高的高精度控制系统,需作为时变 系统处理。
t0 τ1
� 然后按此法继续迭代下去,并将各展开式代入式(3-59),可 得
Φ (t , t0 ) = I + ∫ = I +∫
t t0 t τ1 ⎡ A(τ1 )⎢ I + ∫ A(τ 2 )Φ(τ 2 , t0 )dτ 2 ⎤ dτ1 ⎥ t ⎣ 0 ⎦ t τ1 τ2 ⎡ A(τ1 )dτ1 + ∫ A(τ 1 ) ∫ A(τ 2 ) ⎢ I + ∫ A(τ 3 )Φ(τ 3 , t0 )dτ 3 ⎤ dτ 2 dτ 1 ⎥ t0 t0 t ⎣ 0 ⎦ t τ1 t0 t0
x(t0)=Φ(t0,t0)x(t0)=x(t0)
说明式x(t)=Φ(t,t0)x(t0)满足齐次状态方程及其初始条件。 � 根据微分方程解的唯一性,所以它是齐次状态方程的解。 � 时变系统齐次状态方程的解表示了系统自由运动的特性,也代 表了初始状态x(t0)的转移,其转移特性完全由状态转移矩阵Φ (t,t0)决定。
̇ii (t , t0 ) = aii (t )ϕ ii ( t, t0 ) ⎧ϕ ⎨ ⎩ϕii (t0 , t0 ) = 1
i = 1, 2,..., n
即
t ⎡ ϕii (t , t0 ) = exp ⎢∫ aii (τ )dτ ⎤ ⎥ ⎣ t0 ⎦
状态转移矩阵的性质 (5/8)
5) 块对角矩阵的状态转移矩阵。 如果时变的系统矩阵A(t) 如下表示的块对角矩阵。 A(t)=block-diag{A1(t) A2(t) … Al(t)} 式中,Ai(t)(i=1,2,…,l)为mi×mi维的分块矩阵函数,则A(t)的状 态转移矩阵Φ(t,t0)为如下块对角矩阵。 Φ(t,t0)=block-diag{Φ1(t,t0) Φ2(t,t0) … Φl(t,t0)} 式中 , Φi(t,t0)(i=1,2,…,l) 为满足如下矩阵微分方程的状态转 移矩阵
状态转移矩阵的求解(7/7)
� 上述A(t)和∫A(τ)dτ可交换条件一般较难以检验是否成立。 � 事实上,根据该可交换条件有
∫ [ A(t ) A(τ ) − A(τ ) A(t )] dτ ≡ 0
t0
t
� 上式对于任意时间变量t和t0都成立的充分必要条件是:对 于任意的t1和t2,下式成立 A(t1)A(t2)=A(t2)A(t1) � 所以,实际上较易于检验的条件可取代A(t)和∫A(τ)dτ可交 换条件,成为时变系统的状态转移矩阵的解可表示为指数 矩阵形式的充分必要条件。
状态转移矩阵的性质 (1/8)
2. 状态转移矩阵的性质
� 时变系统的状态转移矩阵的性质如下。 1) Φ(t,t)=I 2) 传递性 Φ(t2,t1)Φ(t1,t0)=Φ(t2,t0)
状态转移矩阵的性质 (2 /8) (2/8)
证明 由于
x(t2)=Φ(t2,t0)x(t0)
且
x(t2)=Φ(t2,t1)x(t1)=Φ(t2,t1)Φ(t1,t0)x(t0)
t t d 1 1 t ⎡ ⎤ exp ∫ A(τ )dτ = A(t ) + A(t ) ∫ A(τ )dτ + ∫ A (τ )dτ A (t ) + ⋯ ⎢ ⎥ t0 ⎣ t0 ⎦ dt 2 2 t0
� 根据状态转移矩阵的解表达式,状态转移矩阵Φ(t,t0)的导 数可表示为
t ̇ Φ(t , t0 ) = A(t ) + A(t )∫ A(τ 2 )dτ 2 + ⋯ t0
状态转移矩阵的求解(5/7)
� 将该指数表达形式的右边展开成级数形式,有
2 t 1 exp ⎡ ∫ A(τ )d τ ⎤ = I + ∫ A(τ )d τ + ⎡ ∫ A(τ )d τ ⎤ + ⋯ ⎢ ⎥ t0 ⎥ ⎣ t0 ⎦ ⎣ t0 ⎦ 2! ⎢
t
t
如果上式是系统的状态转移矩阵,它必须满足状态转移矩阵的定 义式。 � 于是,将上式的两边对时间取导数,
状态转移矩阵的求解(6/7)
� 比较上述两式可知,只有A(t)和∫A(τ)dτ满足乘法可交换条件时, 时变系统的状态转移矩阵可以表示为指数形式。 � 因此,线性时变连续系统齐次状态方程的解也可表示为指 数形式,即
t ⎡ ̇ (t ) = exp ∫ A(τ )d τ ⎤ x(t0 ) x ⎢ ⎥ ⎣ t0 ⎦
t0 t
= I + ∫ A(τ1 )dτ1 + ∫ A(τ 1 ) ∫ A(τ 2 )dτ 2 dτ1
t0
+ ∫ A(τ1 )∫ A(τ 2 )∫
t0 t0
t
τ1
τ2
t0
τ3 ⎡ A(τ 3 )⎢ I + ∫ A(τ 4 )Φ(τ 4 , t 0 )dτ 4 ⎤ dτ 3dτ 2 dτ1 ⎥ t ⎣ 0 ⎦
状态转移矩阵的求解(4/7)
� 当时变的系统矩阵A(t)满足如下条件
A(t ) ∫ A(τ )d τ = ∫ A(τ )d τ A(t)
t0 t0 t t
时,时变系统的状态转移矩阵的解可以表示为
t ⎡ Φ(t , t0 ) = exp ⎢ ∫ A(τ )dτ ⎤ ⎥ ⎣ t0 ⎦
的指数形式。 � 也就是说,只有A(t)与∫A(τ)dτ满足矩阵乘法的可交换条件 时,上述指数表达形式的解才成立。 � 下面对这个条件给予证明。
线性时变连续系统的状态转移矩阵(1/1)
3.3.2 线性时变连续系统的状态转移矩阵
� 下面进一步讨论前面引入的状态转移矩阵,主要内容为: � 状态转移矩阵的求解 � 状态转移矩阵的性质
状态转移矩阵的求解(1/7)
1. 状态转移矩阵的求解
� 对于线性时变连续系统,状态转移矩阵Φ(t,t0)是如下矩阵微 分方程和初始条件 Φ’(t)=A(t)Φ(t), Φ(t)|t=0=I 的解,它是一个n×n维的关于时间变量t和t0的矩阵函数。 � 为了求得状态转移矩阵Φ(t,t0)的表达式,可在时间域内对该 矩阵微分方程积分,即有
� 当系统没有外部输入作用时,线性时变连续系统的状态方程 为齐次状态方程,可表示为 x’(t)=A(t)x(t) � 这里讨论其满足初始状态