PWM功率控制器
pwm控制器的shuffling frequency参数-概述说明以及解释

pwm控制器的shuffling frequency参数-概述说明以及解释1.引言1.1 概述:PWM(Pulse Width Modulation)控制器是一种常用的电子调节技木,通过控制电压的占空比来实现精确的电压调节。
Shuffling Frequency (换能频率)参数作为PWM控制器中的一个重要参数,直接影响着控制器输出信号的稳定性和效率。
本文将深入探讨Shuffling Frequency参数在PWM控制器中的作用及优化方法,旨在为工程师们提供更好的控制器设计和应用方向。
1.2 文章结构本文将从引言开始介绍PWM控制器的概念和原理,然后详细探讨Shuffling Frequency参数在PWM控制器中的作用和优化方法。
在正文部分,我们将分别介绍PWM控制器的基本原理和Shuffling Frequency 参数的定义及其影响,以及如何通过调整Shuffling Frequency参数来提升PWM控制器的性能。
最后,我们将在结论部分总结本文的主要观点,并展望Shuffling Frequency参数在未来的应用前景。
1.3 目的本文旨在深入探讨PWM控制器中的Shuffling Frequency参数,从而帮助读者更好地理解其作用和优化方法。
通过对Shuffling Frequency 参数的详细解释和分析,读者可以更好地掌握如何调节和优化PWM控制器的参数,以实现更高效的电力转换和更稳定的系统性能。
同时,本文还旨在为相关领域的研究者和工程师提供一些有价值的参考和指导,以促进PWM控制器技术的进一步发展和应用。
通过对Shuffling Frequency参数进行深入研究,我们可以更好地理解PWM控制器的工作原理和性能特点,为未来的研究和实践工作提供有益借鉴和启示。
2.正文2.1 PWM控制器简介PWM(Pulse Width Modulation)控制器是一种广泛应用于电力电子领域的技术,它通过调节脉冲信号的占空比来实现对电压或电流的调节。
PWM功率控制器

PWM功率控制器一功率控制器作用功率控制器功率控制器的作用:控制功率,从而间接的控制电流固态继电器需要特制功率控制器用以保护SSR固态继电器(Solid State Relay,缩写SSR),是由微电子电路,分立电子器件,电力电子功率器件组成的无触点开关。
用隔离器件实现了控制端与负载端的隔离。
固态继电器的输入端用微小的控制信号,达到直接驱动大电流负载。
1 无功补偿功率控制器作用是在电子供电系统中提高电网的功率因数,降低供电变压器及输送线路的损耗,提高供电效率,改善供电环境。
工作原理的话,可以通过对负荷的电压、电流、无功功率和功率因数等一堆东西进行实时跟踪测量,通过微机进行分析,计算出无功功率并与预先设定的数值进行比较,自动选择能达到最佳补偿效果的补偿容量并发出指令,由过零触发模块判断双向可控硅的导通时刻,实现快速、无冲击地投入并联电容器组.二、数字功率控制器电流选型方法控制方法采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形。
按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现.直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
随着电力电子技术,微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论,非线性系统控制思想的应用,PWM控制技术获得了空前的发展.到目前为止,已出现了多种PWM控制技术,根据PWM控制技术的特点,到目前为止主要有以下8类方法.等脉宽PWM法VVVF(Variable Voltage Variable Frequency)装置在早期是采用PAM(Pulse Amplitude Modulation)控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压。
变频调速选用课件第三章-PWM控制技术

通过改变PWM信号的占空比,可以调节交流电机输入电压的有 效值,从而实现电机的调速。
交流电机方向控制
通过改变PWM信号的相位,可以改变电机输入电压的相位,从 而控制电机的旋转方向。
交流电机启动与制动
通过PWM信号的频率和占空比的调节,可以实现电机的平滑启 动、制动和停止。
PWM控制在步进电机控PWM控制原理 • PWM控制器设计 • PWM控制技术在电机控制中的应用 • PWM控制技术的实验与实现
01
PWM控制技术概述
PWM控制技术的定义
PWM(脉宽调制)控制技术是 一种通过调节脉冲宽度来控制输 出电压或电流的数字信号处理技
术。
在PWM控制中,脉冲的宽度被 调制,以产生可变的占空比,进
测试PWM信号
通过示波器等工具,测试PWM信号 的波形是否符合预期。
实现电机控制
将PWM信号接入电机驱动器,通过 调整PWM占空比实现电机的调速控 制。
传感器数据采集
如果实验中涉及到传感器数据采集, 需要编写相应的数据采集程序。
PWM控制技术的实验结果分析
分析PWM波形
通过示波器等工具,分析PWM信号的波形是否稳定、占空比是否 准确。
而控制平均输出电压或电流。
PWM控制技术广泛应用于电机 控制、电源管理、音频处理、通
信等领域。
PWM控制技术的发展历程
1960年代
随着数字信号处理技术的发展 ,PWM控制技术开始出现。
1970年代
随着微电子技术的进步,PWM 控制芯片开始出现,广泛应用 于电机控制领域。
1980年代
随着计算机技术的普及,PWM 控制算法开始被广泛应用于电 源管理、音频处理等领域。
步进电机步进控制
士兰微电子SD7530 LED照明高功率因数反激式PWM控制器说明书

高功率因数反激式PWM控制器
日光灯
产品规格分类
产品名称 封装形式 打印名称 材料 包装
无铅料管SD7530 DIP-8-300-2.54
SD7530
无铅料管
SD7530S
SD7530S SOP-8-225-1.27
无铅编带SD7530STR SOP-8-225-1.27
SD7530S
内部框图
40
OL -600/800
误差
放大器
比较器
SD7530说明书
电气参数 (除非特别指定,V
CC
=22V;C O=1nF;-25°C<T amb<125°C)
TEL 158********
SD7530说明书
TEL 158********
管脚描述
封装外形图
SD7530说明书
MOS电路操作注意事项:
静电在很多地方都会产生,采取下面的预防措施,可以有效防止MOS电路由于受静电放电影响而引起的损坏:
• 操作人员要通过防静电腕带接地。
• 设备外壳必须接地。
• 装配过程中使用的工具必须接地。
• 必须采用导体包装或抗静电材料包装或运输。
声明:
•士兰保留说明书的更改权,恕不另行通知!客户在下单前应获取最新版本资料,并验证相关信息是否完整和最新。
•任何半导体产品特定条件下都有一定的失效或发生故障的可能,买方有责任在使用Silan产品进行系统设计和整机制造时遵守安全标准并采取安全措施,以避免潜在失败风险可能造成人身伤害或财产损
失情况的发生!
•产品提升永无止境,我公司将竭诚为客户提供更优秀的产品!
TEL 158********。
PWM控制芯片SG3525功能简介
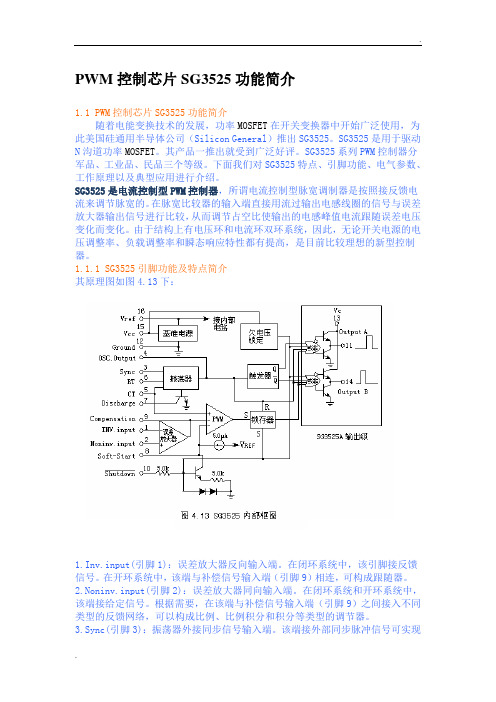
PWM控制芯片SG3525功能简介1.1 PWM控制芯片SG3525功能简介随着电能变换技术的发展,功率MOSFET在开关变换器中开始广泛使用,为此美国硅通用半导体公司(Silicon General)推出SG3525。
SG3525是用于驱动N沟道功率MOSFET。
其产品一推出就受到广泛好评。
SG3525系列PWM控制器分军品、工业品、民品三个等级。
下面我们对SG3525特点、引脚功能、电气参数、工作原理以及典型应用进行介绍。
SG3525是电流控制型PWM控制器,所谓电流控制型脉宽调制器是按照接反馈电流来调节脉宽的。
在脉宽比较器的输入端直接用流过输出电感线圈的信号与误差放大器输出信号进行比较,从而调节占空比使输出的电感峰值电流跟随误差电压变化而变化。
由于结构上有电压环和电流环双环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型控制器。
1.1.1 SG3525引脚功能及特点简介其原理图如图4.13下:1.Inv.input(引脚1):误差放大器反向输入端。
在闭环系统中,该引脚接反馈信号。
在开环系统中,该端与补偿信号输入端(引脚9)相连,可构成跟随器。
2.Noninv.input(引脚2):误差放大器同向输入端。
在闭环系统和开环系统中,该端接给定信号。
根据需要,在该端与补偿信号输入端(引脚9)之间接入不同类型的反馈网络,可以构成比例、比例积分和积分等类型的调节器。
3.Sync(引脚3):振荡器外接同步信号输入端。
该端接外部同步脉冲信号可实现与外电路同步。
4.OSC.Output(引脚4):振荡器输出端。
5.CT(引脚5):振荡器定时电容接入端。
6.RT(引脚6):振荡器定时电阻接入端。
7.Discharge(引脚7):振荡器放电端。
该端与引脚5之间外接一只放电电阻,构成放电回路。
8.Soft-Start(引脚8):软启动电容接入端。
该端通常接一只5 的软启动电容。
pwm控制器,PWM功能原理

pwm 控制器,PWM 功能原理
脉宽调制(PWM)是指用微处理器的数字输出来对模拟电路进行控制,是一种对模拟信号电平进行数字编码的方法。
以数字方式控制模拟电路,可以大幅度降低系统的成本和功耗。
许多微控制器内都包含PWM 控制器。
pwm 控制器基本原理
PWM 控制基本原理依据:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时其效果相同。
PWM 控制原理,将波形分为6 等份,可由6 个方波等效替代。
脉宽调制的分类方法有多种,如单极性和双极性,同步式和异步式,矩形波调制和正弦波调制等。
单极性PWM 控制法指在半个周期内载波只在一个方向变换,所得PWM 波形也只在一个方向变化,而双极性PWM 控制法在半个周期内载波在两个方向变化,所得PWM 波形也在两个方向变化。
根据载波信号同调制信号是否保持同步,PWM 控制又可分为同步调制和异步调制。
矩形波脉宽调制的特点是输出脉宽列是等宽的,只能控制一定次数。
pwm控制加热器原理
pwm控制加热器原理加热器是一种将电能转化为热能的设备,广泛应用于工业生产和家庭生活中。
在许多应用场景中,需要对加热器进行精确的温度控制,以满足不同的工艺要求或者用户需求。
PWM技术通过改变电源电压的脉冲信号占空比,调节电流的平均值,从而控制加热功率。
PWM控制加热器的原理如下:首先,需要一个PWM控制器,它可以根据设定的温度值和反馈信号来生成相应的PWM信号。
控制器会不断地检测被加热物体的温度,并与设定的目标温度进行比较。
根据比较结果,控制器会调整PWM信号的占空比。
当加热器启动时,PWM控制器会输出一个高频脉冲信号,其占空比取决于设定的目标温度。
占空比定义了脉冲信号高电平和低电平的时间比例。
当占空比为100%时,脉冲信号的高电平时间等于一个周期的时间,这时加热器工作在最大功率状态。
当占空比为0%时,脉冲信号的高电平时间为0,加热器处于关闭状态。
通过改变PWM信号的占空比,可以实现对加热器的精确功率控制。
当被加热物体的温度低于设定的目标温度时,PWM控制器会增加脉冲信号的占空比,使加热器的功率增加,加热物体的温度逐渐升高。
当被加热物体的温度接近设定的目标温度时,PWM控制器会减小脉冲信号的占空比,使加热器的功率减小,从而保持温度在设定值附近波动。
通过PWM控制技术,加热器可以实现快速响应和精确控制。
相较于传统的开关控制方式,PWM控制可以减少能量的浪费和温度的波动,提高能源利用率和加热效果。
此外,PWM控制器还可以根据加热器的工作状态进行智能调整,以保持加热器的稳定性和安全性。
需要注意的是,PWM控制加热器时需要考虑加热器的响应时间和稳定性。
由于加热器的热容量和传热特性等因素,加热器的温度变化可能存在一定的滞后性。
因此,在PWM控制中需要根据具体的应用场景和加热器的特性进行参数调整,以实现更好的控制效果。
PWM控制加热器是一种实现精确温度控制的有效方法。
通过改变脉冲信号的占空比,PWM控制器可以调节加热功率,从而实现对加热器的精确控制。
新款低成本绿色功率便携式PWM控制器CR6848说明书
CR6848Novel Low Cost Green-Power PWM Controller Featuresz Low Cost, PWM&PFM&CRMz Low Start-up Current (about 10µA)z Low Operating Current (about 2mA) z Current Mode Operationz Under Voltage Lockout (UVLO)z Built-in Synchronized SlopeCompensationz Programmable PWM Frequencyz Leading edge Blanking on Sense input z Constant output power limiting foruniversal AC inputz Cycle-by-cycle current limitingz Clamped gate output voltage 16.5Vz Over voltage protect 26.7Vz High-Voltage CMOS Process with ESD z SOT-23-6L、SOP-8 & DIP-8 Pb-Free Packagingz Compatible with SG5701 & SG5848 & LD7535 &OB22632/63Applicationsz Switching AC/DC Adaptor z Battery Charger z Open Frame Switching Power Supply z 384X ReplacementGeneral DescriptionThe CR6848 is a highly integrated low cost current mode PWM controller, which is ideal for small power current mode of offline AC-DC fly-back converter applications. Making use of external resistors, the IC changes the operating frequency and automatically enters the PFM/CRM under light-load/zero-load conditions. This can minimize standby power consumption and achieve green-power functions. With a very low start-up current, the CR6848 could use a large value start-up resistor (1.5Mohm). Built-in synchronized slope compensation enhances the stability of the system and avoids sub-harmonic oscillation. Dynamic peak limiting circuit minimizes output power change caused by delay time of the system over a universal AC input range. Leading edge blanking circuit on current sense input could remove the signal glitch due to snubber circuit diode reverse recovery and thus greatly reduces the external component count and system cost in the design. Pulse-by-pulse current limiting ensures safe operation even during short-circuit.The CR6848 offers more protection like OVP (Over Voltage Protection) and OCP (Over current protection). The CR6848’s output driver is clamped to maximum 16.5Vto protect the power MOSFET. Excellent EMI performance is achieved soft switching control at the totem pole gate driver output. CR6848 is offered in SOT-23-6, SOP-8 and DIP-8 packages.Dec, 2006 V1.5 1/14Block DiagramTYPICAL CHARACTERISTICSVDD startup Current VS TemperatureVDD (OFF) VS TemperatureOVP VS TemperatureDuty cycle VS TemperatureVDD startup Current VS TemperatureVDD Operation Current VS TemperaturePWM frequency VS TemperatureF OSC VS FB CurrentF OSC VS RI pin resistorDec, 2006 V1.5 8/14OPERATION DESCRIPTION Current ModelCompared to voltage model control, current model control has a current feedback loop. When the voltage of the sense resistor peak current of the primary winding reaches the internal setting value V TH , comparator reverse, register reset and power MOSFET cut-off. So that to detect and modulate the peak current cycle by cycle could control the output of the power supply. The current feedback has a good linear modulation rate and a fast input and output dynamic impact avoid the pole that the output filter inductance brings and the second class system descends to first class and so it widens the frequency range and optimizes overload protection and short circuit protection.Startup Current and Under Voltage LockoutThe startup current of CR6848 is set to be very low so that a large value startup resistor can therefore be used to minimize the power loss. For AC to DC adaptor with universal input range design, a 1.5 M Ω, 1/8 W startup resistor and a 10uF/25V VDD hold capacitor could be used.The turn-on and turn-off threshold of the CR6848 is designed to 16.1V/11.1V. During startup, the hold-up capacitor must be charge to 16.1V through the startup resistor. The hysteresis is implemented to prevent the shutdown from the voltage dip during startup.Internal Bias and OSC OperationA resistor connected between RI pin and GND pin set the internal constant current source to charge or discharge the internal fixed cap. The charge time and discharge time determine the internal clock speed and the switching frequency. Increasing the resistance will reduce the value of the input current and reduce the switching frequency. The relationship between RI pin and PWM switching frequency follows the below equation within the RI allowed range.)()(5800kHz K RI F OSC Ω=For example, a 100k Ω resistor RI could generate a 50uA constant current and a 58kHz PWM switching frequency. Thesuggested operating frequency range of CR6848 is within 48KHz to 100KHz.Green Power OperationThe power dissipation of switching mode power supply is very important in zero load or light load condition. The major dissipation result from conduction loss 、switching loss and consume of the control circuit. However, all of them related to the switching frequency. There are many difference topologies has been implemented in different chip. The basic operation theory of all these approaches intended to reduce the switching frequency under light-load or no-load condition.CR6848`s green power function adapts PWM 、PFM and CRM combining modulation. When RI resistor is 100k, the PWM frequency is 58kHz in medium or heavy load operation. Through modifying the pulse width, CR6848 could control output voltage. The current of FB pin increases when the load is in light condition and the internal mode controller enters PFM&PWM when the feedback current is over 0.92mA. The operation frequency of oscillator is to descend gradually. The invariable frequency of oscillator is 11.6kHz when the feedback current is over 1.05mA. To decrease the standby consumption of the power supply , Chip-Rail introduces the Cycle Reset Mode technology ;If the feedback current were over 1.1mA, mode controller of CR6848 would reset internal register all the time and cut off the gate pin, while the output voltage is lower than the set value, it would set register, gate pin operating again. Although the frequency of the internal OSC is invariable, the register would reset some pulses so that the practical frequency is decreased at the gate pin.CR6848 Green-Power FunctionDec, 2006 V1.5 9/14Internal Synchronized Slop Compensation Although there are more advantages of the current mode control than conventional voltage mode control, there are still several drawbacks of peak-sensing current-mode converter. Especially the open loop instability when it operates in higher than 50% of the duty-cycle. CR6848 is introduced an internal slope compensation adding voltage ramp to the current sense input voltage for PWM generation to solve this problem. It improves the close loop stability greatly at CCM, prevents the sub-harmonic oscillation and thus reduces the output ripple voltage.DUTYDUTY DUTYV MAXSLOP ×=×=4389.033.0Current Sensing & Dynamic peak limitingThe current flowing by the power MOSFET comes in to being a voltage V SENSE on the sense pin cycle by cycle, which compares to the internal reference voltage, controls the reverse of the internal register, limits the peak current IMAX of the primary of the transformer. The energy 221MAX I L E ××=deposited by the transformer. So adjusting the R SENSE can set the Max output power of the power supple mode. The current flowing by the power MOSFET has an extra valueD PINT L V I ×=∆ due to the system delay T that the current detected from the sense pin to power MOSFET cut off in the CR6848 (Among these, V IN is the primary winding voltage of the transformer and L P is theprimary wind inductance. IN V ranges from 85VAC to 264V AC. To guarantee the outputpower is a constant for universal input AC voltage, there is a dynamic peak limit circuit to compensate the system delay T that the system delay brings on.Leading-edge Blanking (LEB)Each time the power MOSFET is switched on, a turn-on spike will inevitably occur at the sense pin, which would disturb the internal signal from the sampling of the R SENSE . There is a 300n sec leading edge blanking time built in to avoid the effect of the turn-on spike and the power MOSFET cannot be switched off during this time. So that the conventional external RC filtering on sense input is no longer required.Over Voltage Protection (OVP)There is a 26.7V over-voltage protection circuit in the CR6848 to improve the credibility and extend the life of the chip. The GATE is to shutdown immediately when the voltage of the VDD is over 26.7V and the voltage of VDD is to descend rapidly.Gate Driver & Soft ClampedCR6848’ output designs a totem pole to drive a periphery power MOSFET. The dead time is introduced to minimize the transfixion current when the output is drove. The NMOS is shut off when the other NMOS is turned on. The clamp technology is introduced to protect the periphery power MOSFET from breaking down.。
英飞凌 ICE5xSAG 第五代固定频率PWM控制器 数据表
ICE5xSAG采用 DSO-8 封装的固定频率 PWM 控制器产品亮点• 可选进入和退出待机功率电平的增强型主动突发模式,其最低待机功率小于 100 mW• 数字降频模式,提高整体系统效率 • 借助共源共栅配置实现快速启动 • 支持频率抖动和软栅极驱动,实现低 EMI • 集成误差放大器• 具备交流输入过压保护,提供全面防护 • 无铅电镀、无卤模塑化合物,符合 RoHS 标准特性• 可选进入和退出待机功率电平的增强型主动突发模式• 数字频率降低,提高整体系统效率 • 借助共源共栅配置实现快速启动• 支持 DCM (非连续导通模式)和 CCM (连续导通模式)运行,具备斜坡补偿• 支持频率抖动和软栅极驱动,实现低 EMI • 内置数字软启动• 集成误差放大器,在非隔离反激式架构中支持直接(原边)反馈• 具备交流输入过压保护、V CC 过压、V CC 欠压、过载/开路及过温保护机制,提供全面防护• 所有保护功能均处于自动重启模式 • 受限的V CC 短接至地的充电电流应用• 适用于家用电器/白色家电、电视、电脑及服务器的辅助电源• 蓝光播放器、机顶盒和 LCD/LED 显示器产品验证完全符合 JEDEC 工业应用标准要求描述ICE5xSAG 是第五代固定频率 PWM 控制器,支持共源共栅配置,并针对离线开关模式电源进行了优化。
其共源共栅配置亦可实现快速启动。
器件通过降低频率并软化栅极驱动和频率抖动,进而在低负载和 50% 负载之间实现低 EMI 效果,并提高了效率。
产品支持主动突发模式,可选进入和退出待机功率,输出电压纹波小且可控,因此可在待机模式下具备较高的灵活性和极低功耗。
此外, ICE5xSAG 有宽的供电电压工作范围 (10.0~25.5 V),功耗较低。
产品具备诸多保护功能,提供可调交流输入过压保护,可在故障情况下为电源系统提供全面防护。
凭借上述特性,第五代 ICE5xSAG 系列得以成为市面上用于固定频率反激式转换器的理想 PWM 控制器。
OB2538中文资料
原边控制高精度恒压/恒流 PWM 控制器
极限值
项目
数值
VDD 电压
-0.3 到 VDD 箝位电压
VDD 齐纳管箝位连续电流
10mA
COMP 电压
-0.3 到 7V
CS 输入电压
-0.3 到 7V
INV 输入电压
-0.3 到 7V
最大工作结温 Tj
150℃
最小/最大贮存温度
-55 到 150℃
引脚温度(焊锡,10 秒)
1
应用
中小功率 AC/DC 离线式开关电源 ■ 手机充电器 ■ 数码相机充电器 ■ 小功率适配器 ■ PC、TV 等电器的辅助电源 ■ 线性调节器/替代 RCC 变换器 ■ 恒流 LED 照明 封装形式:DIP8
典型应用
OB2538
原边控制高精度恒压/恒流 PWM 控制器
一般信息
引脚图
2
OB2538
14
Δf/Freq
频率抖动范围
±6
误差放大器部分
Vref_EA
EA 参考电压
1.95 2
2.05
Gain
EA DC 增益
60
I_COMP_MAX 最 大 缆 线 补 偿 电 INV=2V,Comp=0V
37.5
流
注:Freq_Max 是指 IC 内部最大时钟频率,在系统应用里,60KHz 的最大工作频
率正常发生在最大输出功率或者从 CV 到 CC 状态的转换点。
特性曲线
单位
uA mA
V V V V
ns mV ns KΩ ms
KHz KHz
KHz %
V dB uA
4
OB2538
原边控制高精度恒压/恒流 PWM 控制器
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PWM功率控制器一功率控制器作用功率控制器功率控制器的作用:控制功率,从而间接的控制电流固态继电器需要特制功率控制器用以保护SSR固态继电器(Solid State Relay,缩写SSR),是由微电子电路,分立电子器件,电力电子功率器件组成的无触点开关。
用隔离器件实现了控制端与负载端的隔离。
固态继电器的输入端用微小的控制信号,达到直接驱动大电流负载。
1 无功补偿功率控制器作用是在电子供电系统中提高电网的功率因数,降低供电变压器及输送线路的损耗,提高供电效率,改善供电环境。
工作原理的话,可以通过对负荷的电压、电流、无功功率和功率因数等一堆东西进行实时跟踪测量,通过微机进行分析,计算出无功功率并与预先设定的数值进行比较,自动选择能达到最佳补偿效果的补偿容量并发出指令,由过零触发模块判断双向可控硅的导通时刻,实现快速、无冲击地投入并联电容器组。
二、数字功率控制器电流选型方法控制方法采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同.PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形.按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率.PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现.直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用.随着电力电子技术,微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论,非线性系统控制思想的应用,PWM控制技术获得了空前的发展.到目前为止,已出现了多种PWM控制技术,根据PWM控制技术的特点,到目前为止主要有以下8类方法.等脉宽PWM法VVVF(Variable V oltage Variable Frequency)装置在早期是采用PAM(Pulse Amplitude Modulation)控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压.等脉宽PWM法正是为了克服PAM法的这个缺点发展而来的,是PWM法中最为简单的一种.它是把每一脉冲的宽度均相等的脉冲列作为PWM波,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化.相对于PAM法,该方法的优点是简化了电路结构,提高了输入端的功率因数,但同时也存在输出电压中除基波外,还包含较大的谐波分量.随机PWM在上世纪70年代开始至上世纪80年代初,由于当时大功率晶体管主要为双极性达林顿三极管,载波频率一般不超过5kHz,电机绕组的电磁噪音及谐波造成的振动引起了人们的关注.为求得改善,随机PWM方法应运而生.其原理是随机改变开关频率使电机电磁噪音近似为限带白噪声(在线性频率坐标系中,各频率能量分布是均匀的),尽管噪音的总分贝数未变,但以固定开关频率为特征的有色噪音强度大大削弱.正因为如此,即使在IGBT已被广泛应用的今天,对于载波频率必须限制在较低频率的场合,随机PWM仍然有其特殊的价值;另一方面则说明了消除机械和电磁噪音的最佳方法不是盲目地提高工作频率,随机PWM技术正是提供了一个分析,解决这种问题的全新思路.SPWM法SPWM(Sinusoidal PWM)法是一种比较成熟的,目前使用较广泛的PWM法.前面提到的采样控制理论中的一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同.SPWM法就是以该结论为理论基础,用脉冲宽度按正弦规律变化而和正弦波等效的PWM波形即SPWM波形控制逆变电路中开关器件的通断,使其输出的脉冲电压的面积与所希望输出的正弦波在相应区间内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出电压的频率和幅值.该方法的实现有以下几种方案.等面积法该方案实际上就是SPWM法原理的直接阐释,用同样数量的等幅而不等宽的矩形脉冲序列代替正弦波,然后计算各脉冲的宽度和间隔,并把这些数据存于微机中,通过查表的方式生成PWM信号控制开关器件的通断,以达到预期的目的.由于此方法是以SPWM控制的基本原理为出发点,可以准确地计算出各开关器件的通断时刻,其所得的的波形很接近正弦波,但其存在计算繁琐,数据占用内存大,不能实时控制的缺点.硬件调制法硬件调制法是为解决等面积法计算繁琐的缺点而提出的,其原理就是把所希望的波形作为调制信号,把接受调制的信号作为载波,通过对载波的调制得到所期望的PWM波形.通常采用等腰三角波作为载波,当调制信号波为正弦波时,所得到的就是SPWM波形.其实现方法简单,可以用模拟电路构成三角波载波和正弦调制波发生电路,用比较器来确定它们的交点,在交点时刻对开关器件的通断进行控制,就可以生成SPWM波.但是,这种模拟电路结构复杂,难以实现精确的控制.软件生成法由于微机技术的发展使得用软件生成SPWM波形变得比较容易,因此,软件生成法也就应运而生.软件生成法其实就是用软件来实现调制的方法,其有两种基本算法,即自然采样法和规则采样法.自然采样法以正弦波为调制波,等腰三角波为载波进行比较,在两个波形的自然交点时刻控制开关器件的通断,这就是自然采样法.其优点是所得SPWM波形最接近正弦波,但由于三角波与正弦波交点有任意性,脉冲中心在一个周期内不等距,从而脉宽表达式是一个超越方程,计算繁琐,难以实时控制.规则采样法规则采样法是一种应用较广的工程实用方法,一般采用三角波作为载波.其原理就是用三角波对正弦波进行采样得到阶梯波,再以阶梯波与三角波的交点时刻控制开关器件的通断,从而实现SPWM法.当三角波只在其顶点(或底点)位置对正弦波进行采样时,由阶梯波与三角波的交点所确定的脉宽,在一个载波周期(即采样周期)内的位置是对称的,这种方法称为对称规则采样.当三角波既在其顶点又在底点时刻对正弦波进行采样时,由阶梯波与三角波的交点所确定的脉宽,在一个载波周期(此时为采样周期的两倍)内的位置一般并不对称,这种方法称为非对称规则采样.规则采样法是对自然采样法的改进,其主要优点就是是计算简单,便于在线实时运算,其中非对称规则采样法因阶数多而更接近正弦.其缺点是直流电压利用率较低,线性控制范围较小.以上两种方法均只适用于同步调制方式中.低次谐波消去法低次谐波消去法是以消去PWM波形中某些主要的低次谐波为目的的方法.其原理是对输出电压波形按傅氏级数展开,表示为u (ωt)=ansinnωt,首先确定基波分量a1的值,再令两个不同的an=0,就可以建立三个方程,联立求解得a1,a2及a3,这样就可以消去两个频率的谐波.该方法虽然可以很好地消除所指定的低次谐波,但是,剩余未消去的较低次谐波的幅值可能会相当大,而且同样存在计算复杂的缺点.该方法同样只适用于同步调制方式中.梯形波与三角波比较法前面所介绍的各种方法主要是以输出波形尽量接近正弦波为目的,从而忽视了直流电压的利用率,如SPWM法,其直流电压利用率仅为86.6%.因此,为了提高直流电压利用率,提出了一种新的方法--梯形波与三角波比较法.该方法是采用梯形波作为调制信号,三角波为载波,且使两波幅值相等,以两波的交点时刻控制开关器件的通断实现PWM控制.由于当梯形波幅值和三角波幅值相等时,其所含的基波分量幅值已超过了三角波幅值,从而可以有效地提高直流电压利用率.但由于梯形波本身含有低次谐波,所以输出波形中含有5次,7次等低次谐波.线电压控制PWM前面所介绍的各种PWM控制方法用于三相逆变电路时,都是对三相输出相电压分别进行控制的,使其输出接近正弦波,但是,对于像三相异步电动机这样的三相无中线对称负载,逆变器输出不必追求相电压接近正弦,而可着眼于使线电压趋于正弦.因此,提出了线电压控制PWM,主要有以下两种方法.马鞍形波与三角波比较法马鞍形波与三角波比较法也就是谐波注入PWM方式(HIPWM),其原理是在正弦波中加入一定比例的三次谐波,调制信号便呈现出马鞍形,而且幅值明显降低,于是在调制信号的幅值不超过载波幅值的情况下,可以使基波幅值超过三角波幅值,提高了直流电压利用率.在三相无中线系统中,由于三次谐波电流无通路,所以三个线电压和线电流中均不含三次谐波[4].除了可以注入三次谐波以外,还可以注入其他3倍频于正弦波信号的其他波形,这些信号都不会影响线电压.这是因为,经过PWM调制后逆变电路输出的相电压也必然包含相应的3倍频于正弦波信号的谐波,但在合成线电压时,各相电压中的这些谐波将互相抵消,从而使线电压仍为正弦波.单元脉宽调制法因为,三相对称线电压有Uuv+Uvw+Uwu=0的关系,所以,某一线电压任何时刻都等于另外两个线电压负值之和.现在把一个周期等分为6个区间,每区间60°,对于某一线电压例如Uuv,半个周期两边60°区间用Uuv本身表示,中间60°区间用-(Uvw+Uwu)表示,当将Uvw和Uwu作同样处理时,就可以得到三相线电压波形只有半周内两边60°区间的两种波形形状,并且有正有负.把这样的电压波形作为脉宽调制的参考信号,载波仍用三角波,并把各区间的曲线用直线近似(实践表明,这样做引起的误差不大,完全可行),就可以得到线电压的脉冲波形,该波形是完全对称,且规律性很强,负半周是正半周相应脉冲列的反相,因此,只要半个周期两边60°区间的脉冲列一经确定,线电压的调制脉冲波形就唯一地确定了.这个脉冲并不是开关器件的驱动脉冲信号,但由于已知三相线电压的脉冲工作模式,就可以确定开关器件的驱动脉冲信号了.该方法不仅能抑制较多的低次谐波,还可减小开关损耗和加宽线性控制区,同时还能带来用微机控制的方便,但该方法只适用于异步电动机,应用范围较小.电流控制PWM电流控制PWM的基本思想是把希望输出的电流波形作为指令信号,把实际的电流波形作为反馈信号,通过两者瞬时值的比较来决定各开关器件的通断,使实际输出随指令信号的改变而改变.其实现方案主要有以下3种.滞环比较法这是一种带反馈的PWM控制方式,即每相电流反馈回来与电流给定值经滞环比较器,得出相应桥臂开关器件的开关状态,使得实际电流跟踪给定电流的变化.该方法的优点是电路简单,动态性能好,输出电压不含特定频率的谐波分量.其缺点是开关频率不固定造成较为严重的噪音,和其他方法相比,在同一开关频率下输出电流中所含的谐波较多.三角波比较法该方法与SPWM法中的三角波比较方式不同,这里是把指令电流与实际输出电流进行比较,求出偏差电流,通过放大器放大后再和三角波进行比较,产生PWM波.此时开关频率一定,因而克服了滞环比较法频率不固定的缺点.但是,这种方式电流响应不如滞环比较法快.预测电流控制法预测电流控制是在每个调节周期开始时,根据实际电流误差,负载参数及其它负载变量,来预测电流误差矢量趋势,因此,下一个调节周期由PWM产生的电压矢量必将减小所预测的误差.该方法的优点是,若给调节器除误差外更多的信息,则可获得比较快速,准确的响应.目前,这类调节器的局限性是响应速度及过程模型系数参数的准确性.空间电压矢量控制PWM空间电压矢量控制PWM(SVPWM)也叫磁通正弦PWM法.它以三相波形整体生成效果为前提,以逼近电机气隙的理想圆形旋转磁场轨迹为目的,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,由它们的比较结果决定逆变器的开关,形成PWM波形.此法从电动机的角度出发,把逆变器和电机看作一个整体,以内切多边形逼近圆的方式进行控制,使电机获得幅值恒定的圆形磁场(正弦磁通).具体方法又分为磁通开环式和磁通闭环式.磁通开环法用两个非零矢量和一个零矢量合成一个等效的电压矢量,若采样时间足够小,可合成任意电压矢量.此法输出电压比正弦波调制时提高15%,谐波电流有效值之和接近最小.磁通闭环式引入磁通反馈,控制磁通的大小和变化的速度.在比较估算磁通和给定磁通后,根据误差决定产生下一个电压矢量,形成PWM波形.这种方法克服了磁通开环法的不足,解决了电机低速时,定子电阻影响大的问题,减小了电机的脉动和噪音.但由于未引入转矩的调节,系统性能没有得到根本性的改善.矢量控制PWM矢量控制也称磁场定向控制,其原理是将异步电动机在三相坐标系下的定子电流Ia,Ib及Ic,通过三相/二相变换,等效成两相静止坐标系下的交流电流Ia1及Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1及It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿对直流电动机的控制方法,实现对交流电动机的控制.其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制.通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制.但是,由于转子磁链难以准确观测,以及矢量变换的复杂性,使得实际控制效果往往难以达到理论分析的效果,这是矢量控制技术在实践上的不足.此外.它必须直接或间接地得到转子磁链在空间上的位置才能实现定子电流解耦控制,在这种矢量控制系统中需要配置转子位置或速度传感器,这显然给许多应用场合带来不便.直接转矩控制PWM1985年德国鲁尔大学Depenbrock教授首先提出直接转矩控制理论(Direct Torque Control简称DTC).直接转矩控制与矢量控制不同,它不是通过控制电流,磁链等量来间接控制转矩,而是把转矩直接作为被控量来控制,它也不需要解耦电机模型,而是在静止的坐标系中计算电机磁通和转矩的实际值,然后,经磁链和转矩的Band-Band控制产生PWM信号对逆变器的开关状态进行最佳控制,从而在很大程度上解决了上述矢量控制的不足,能方便地实现无速度传感器化,有很快的转矩响应速度和很高的速度及转矩控制精度,并以新颖的控制思想,简洁明了的系统结构,优良的动静态性能得到了迅速发展.但直接转矩控制也存在缺点,如逆变器开关频率的提高有限制.非线性控制PWM单周控制法[7]又称积分复位控制(Integration Reset Control,简称IRC),是一种新型非线性控制技术,其基本思想是控制开关占空比,在每个周期使开关变量的平均值与控制参考电压相等或成一定比例.该技术同时具有调制和控制的双重性,通过复位开关,积分器,触发电路,比较器达到跟踪指令信号的目的.单周控制器由控制器,比较器,积分器及时钟组成,其中控制器可以是RS触发器,其控制原理如图1所示.图中K可以是任何物理开关,也可是其它可转化为开关变量形式的抽象信号.单周控制在控制电路中不需要误差综合,它能在一个周期内自动消除稳态,瞬态误差,使前一周期的误差不会带到下一周期.虽然硬件电路较复杂,但其克服了传统的PWM控制方法的不足,适用于各种脉宽调制软开关逆变器,具有反应快,开关频率恒定,鲁棒性强等优点,此外,单周控制还能优化系统响应,减小畸变和抑制电源干扰,是一种很有前途的控制方法.谐振软开关PWM传统的PWM逆变电路中,电力电子开关器件硬开关的工作方式,大的开关电压电流应力以及高的du/dt和di/dt限制了开关器件工作频率的提高,而高频化是电力电子主要发展趋势之一,它能使变换器体积减小,重量减轻,成本下降,性能提高,特别当开关频率在18kHz以上时,噪声将已超过人类听觉范围,使无噪声传动系统成为可能.谐振软开关PWM的基本思想是在常规PWM变换器拓扑的基础上,附加一个谐振网络,谐振网络一般由谐振电感,谐振电容和功率开关组成.开关转换时,谐振网络工作使电力电子器件在开关点上实现软开关过程,谐振过程极短,基本不影响PWM技术的实现.从而既保持了PWM技术的特点,又实现了软开关技术.但由于谐振网络在电路中的存在必然会产生谐振损耗,并使电路受固有问题的影响,从而限制了该方法的应用。