基于扩展卡尔曼滤波器的超紧耦合GPS/INS组合导航系统设计
基于扩展Kalman滤波的GPS定位算法研究

基于扩展Kalman滤波的GPS定位算法研究GPS定位算法是现代导航系统中的重要组成部分,其精度直接影响到车辆的位置准确性、导航指引的正确性以及整个系统的性能。
虽然传统的Kalman滤波算法已经被广泛应用于GPS定位中,但是在特殊场景下,其精度还是有限。
因此,本文将介绍基于扩展Kalman滤波的GPS定位算法研究进展。
1. GPS定位原理及基本流程GPS定位系统基于卫星发射信号和地面接收器接收信号的时间差测量来确定接收器的位置。
GPS基本流程如下:首先,接收器与卫星之间通过微波通信建立联系。
接收器接收从卫星发送的导航信号,并记录其时间信息。
接收器将测量到的信号传输时间与卫星发射信号的时间进行比较,从而计算出信号传播的时间差。
每个卫星都有自己的坐标,这个卫星通过可见性能够被确定,并且相应的位置信息会被传输回地面接收器。
由于接收器记录了至少三个卫星信号的时间信息,因此可以使用数学方法推导出接收器的位置坐标。
在实践操作中,这个方法会考虑到信号传播的时间以及各种噪声的影响,最终得到卫星定位及地球表面物体的坐标信息。
GPS定位算法的最终结果质量与GPS接收机的设计和信号处理算法有关。
2. 传统Kalman滤波算法在GPS定位中的应用Kalman滤波是一种最优估计过程,用于估计具有内部噪声和外部力影响的系统的状态变量。
Kalman滤波包括两个步骤:预测和修正。
预测步骤利用系统动力学方程来预测下一个时刻的状态变量。
修正步骤则使用测量方程将观测数据与预测结果进行比较,计算出评估误差,并将其用于调整预测值,得到更精确的结果。
在GPS定位中,传统Kalman滤波算法的基本思路是基于GPS信号的三个度量值,即码伪距、载波相位和多普勒频率,将其作为状态向量,建立状态方程和观测方程,然后利用Kalman滤波算法进行状态估计。
然而,Kalman滤波算法对于状态变量的线性性、高斯性等有一定的前提条件。
在实践中,GPS信号在传输过程中会受到多种噪声的干扰,使得传统Kalman滤波的预测结果精度有限。
卡尔曼滤波与H∞滤波在INS/GPS组合导航中的应用

0 弓I
舌
式 中 x() 为状 态矩 阵
组 合 导航通 常 采用传 统 的卡尔 曼 ( l n 滤 Kama )
波方法 将 各种传 感 器 的信息融 合在 一起 , 使得 构成 组 合 系统 的各项 性 能 指标 均优 于 2个 子 系 统 单独 工 作 时的性 能 。但 是 在 对 参数 不确 定 系 统 和 有 色 噪声情 况 下 , l n滤波器 效果 难 以令人 满意口 , Kama ] 而近 年来 提 出的 H 滤波方 法对 不 确定 和 有色 噪声
I / S组合 导航 , 何 确 定 y值 以更 好 地 提 高 NS GP 如 精度 是下 一 步研究 的重 点 。
原 理 [ . 安 : 北 工 业 大 学 出 版社 ,0 7 M] 西 西 20.
作者简 介
参 考 文献
波算 法 与 H。滤波 算 法 , 过 VS 0 8编 程 实 现算 。 通 20
法 。对 于滤波 初值 的选 取 , 样 频率 为 1 oHz下 采 0 , 列参 数 由经验 确定 : 状态 X 的初 值 全部 取 零 , 陀螺
2 卡尔 曼 滤 波 与 H。 波 方 程 。 滤
将 上 述 I / S组 合 导 航 模 型 离 散 化 后 分 NS GP 别 建立标 准 卡尔 曼滤 波算 法与 H 滤 波算 法
具 有 较 强 的 鲁 棒 性 能 , 满 足 人 们 对 性 能 的 要 能
x()一 [
8 v
8 8 1 w f] ×  ̄
F £为连 续系 统 的状 态 转移矩 阵 ()
o o 0 o
F = =
一
2
求[ 。研究 了 I / S线 性 系 统 的 滤波 问题 , 2 ] NS GP 分 别用 卡尔 曼滤 波和 H 滤 波解 的实 例仿 真 说 明 了所 提 出方法 的可行性 和正 确性 。
SINS/GPS组合导航的扩展Kalman滤波算法
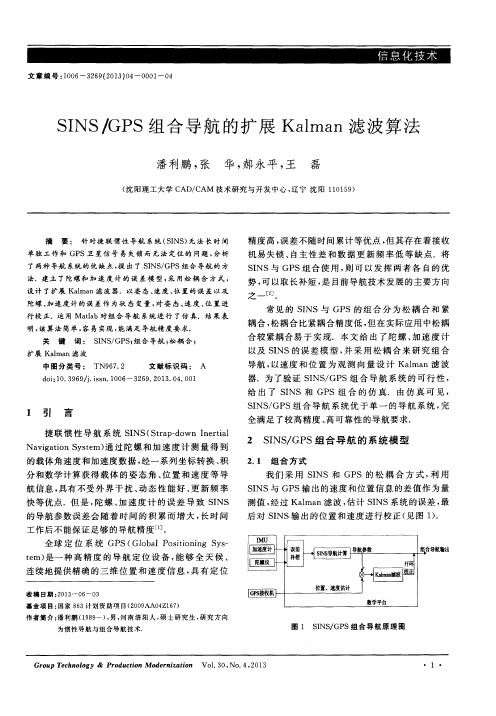
我们采用 S I NS和 G P S的 松 耦 合 方 式 , 利 用
航 信息 , 具 有不受 外 界 干扰 、 动态 性 能好 、 更 新 频 率
快 等优 点.但 是 , 陀螺、 加速度计的误差导致 S I NS 的导航 参数 误差 会 随 着 时 间 的积 累 而增 大 , 长时 间 工 作后 不能 保证 足够 的导 航精 度 l 1 ] .
文献标识码 : A
32 69 .2 01 3. 0 4. 001
给出了 S I NS和 G P S组 合 的 仿 真. 由仿 真 可 见 ,
1 引 言
捷联惯性 导航系统 S I NS ( S t r a p — d o wn I n e r t i a l
S I NS / GP S组 合 导 航 系 统 优 于单 一 的导 航 系 统 , 完 全 满足 了较 高精 度 、 高 可靠性 的 导航要 求 .
明, 该 算法简单 , 容 易 实现 , 能 满 足 导 航 精 度 要 求.
关 键 词: S I N S / l ma n滤 波
中 图 分 类 号 : TN 9 6 7 . 2 d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 6
但 由于加速 度计 的 随机 常 数 和 白噪声 较 小 , 因此 通
Na v i g a t i o n S y s t e m) 通 过 陀 螺 和加 速度 计 测 量 得 到 的载 体角 速度 和加 速度 数据 , 经一 系列 坐 标转 换 、 积 分 和数 学计 算 获得 载 体 的 姿 态 角 、 位 置 和 速度 等 导
2 S I NS / GP S组 合 导 航 的 系 统 模 型
《基于CKF算法的SINS-BDS超紧耦合组合导航方法研究》范文

《基于CKF算法的SINS-BDS超紧耦合组合导航方法研究》篇一基于CKF算法的SINS-BDS超紧耦合组合导航方法研究一、引言随着全球定位系统(GPS)和惯性导航系统(INS)技术的快速发展,组合导航技术已经成为现代导航系统的重要发展方向。
本文针对SINS(Strapdown Inertial Navigation System,捷联式惯性导航系统)与BDS(北斗卫星导航系统)之间的超紧耦合组合导航方法进行了深入研究。
本研究通过采用CKF(基于Chaos Kriging Kernel的非线性滤波算法)算法来提高SINS/BDS组合导航系统的性能和可靠性。
二、背景及意义在传统导航系统中,SINS与BDS分别依靠不同的工作原理提供各自的导航信息。
然而,这两种导航系统在实际应用中存在着一定的局限性。
SINS的精度随时间增长而逐渐降低,而BDS 在复杂环境中可能受到干扰和影响。
因此,将SINS与BDS进行组合,通过超紧耦合的方式提高导航系统的性能和可靠性具有重要的研究意义。
本研究采用CKF算法作为核心算法,以提高SINS/BDS组合导航的准确性和稳定性。
三、CKF算法介绍CKF算法是一种基于Chaos Kriging Kernel的非线性滤波算法,具有优秀的滤波性能和抗干扰能力。
该算法能够在高动态、复杂环境下有效估计系统状态,降低系统噪声和误差的影响。
本研究将CKF算法应用于SINS/BDS超紧耦合组合导航系统中,以实现更高精度的导航定位。
四、SINS/BDS超紧耦合组合导航方法研究本研究通过建立SINS/BDS超紧耦合组合导航模型,将SINS 和BDS的测量信息进行紧密融合。
在CKF算法的帮助下,该模型能够实时估计系统状态,并对误差进行修正。
具体研究内容包括:1. 构建SINS/BDS组合导航模型:通过分析SINS和BDS的工作原理及特点,建立两者之间的数学模型,实现信息的紧密融合。
2. 引入CKF算法:将CKF算法应用于SINS/BDS组合导航模型中,实现对系统状态的实时估计和误差修正。
GPS与惯导系统的组合导航技术
谢谢观看
LOGO
GPS/INS
INS:
INS 不仅能够提供载体位置、速度参数,还能提 供载体的三维姿态参数,是完全自主的导航方式,在 航空、航天、航海和陆地等几乎所有领域中都得 到了广泛应用。但是,INS 难以克服的缺点是其导航 定位误差随时间累加,难以长时间独立工作。
LOGO
GPS/INS
GPS/INS组合:
LOGO
紧耦合和松耦合
优点:
1.组合结构简单,便于工程实现,便于实现容错 2.两个系统能够独立工作,使得导航系统有一定的 余度
缺点:
1. GPS 输出的位置、速度通常是与时间相关的; 2.INS 和 GPS 信息流动是单向的,INS 无法辅GPS。
LOGO
GPS/INS
紧耦合:
紧耦合模式是指利用 GPS 接收机的的原始信息来和惯 导系统组合,原始信息一般是指伪距、伪距率、载波 相位等。
LOGO
分类:
基于卡尔曼组合数据的融合方法
按照组合中滤波器的设置来分类,可以分成: 集中式的卡尔曼滤波 分布式的卡尔曼滤波 按照对系统校正方法的不同,分为: 开环校正(输出校正) 闭环校正(反馈矫正) 按照组合水平的深度不同,分为: 松耦合 紧耦合 根据卡尔曼滤波器所估计的状态不同,卡尔曼 滤波在组合导航中的应用有: 直接法 间接法
目录
2 3
LOGO
紧耦合和松耦合
基于卡尔曼滤波的组合方式:
利用卡尔曼滤波器设计 GPS/INS 组合导航系统的方法 多种多样按照组合水平的深度不同,分为: 松耦合 紧耦合
LOGO
紧耦合和松耦合
松耦合:
松耦合模式是指直接利用 GPS 接收机输出的定位信 息与 INS 组合,它是一种 低水平的组合。位置、速 度组合是其典型代表,它 采用 GPS 和 INS 输出的位 置和速度信息的差值作为 量测值。
基于扩展卡尔曼滤波的GPS导航系统设计

基于扩展卡尔曼滤波的GPS导航系统设计随着科技的不断发展,全球定位系统(GPS)已经成为现代导航系统中不可或缺的一部分。
GPS导航系统可以帮助我们确定当前的位置,并提供最佳的路线规划,以便我们到达目的地。
在这篇文章中,我们将从基础的GPS技术入手,介绍通过扩展卡尔曼滤波算法设计GPS导航系统的方法和技术。
GPS导航系统的原理和基础知识GPS导航系统是由一组卫星和地面的基站组成的。
GPS卫星通过广播时间信号使接收器可以计算出自己的位置,并确定地面上目标的位置和速度。
使用GPS技术可以更有效地应用我们的移动设备和汽车导航系统,但是由于GPS信号容易受到各种干扰和错误,这就需要使用一种基于扩展卡尔曼滤波的方法来进行校准和纠正。
为了更好地理解GPS导航系统,我们需要了解GPS信号的基本工作原理。
GPS卫星向接收器发送时钟信号,接收器可以用这个信号来计算出到该卫星的距离,然后通过三个卫星来确定自己的位置。
然而,由于GPS信号很容易受到干扰和误差,因此在实际应用中可能出现较大的误差。
扩展卡尔曼滤波扩展卡尔曼滤波是一种常用的GPS信号校正和纠正的算法。
它是卡尔曼滤波的扩展版本,根据实际的GPS数据来计算位置和速度,并对信号进行校正和纠正。
扩展卡尔曼滤波的基本原理是根据已知的系统模型计算未知的状态向量,并利用这些计算出的状态向量来估计未来的值。
在GPS导航系统中,这意味着我们可以根据已知的卫星位置和时钟信号来计算目标的位置和速度。
在扩展卡尔曼滤波算法中,我们首先需要确定系统的状态向量和测量向量。
系统状态向量是包含目标位置和速度的向量数组,而测量向量则包含所有测量的值,包括GPS卫星的位置和时钟信号。
然后我们通过以下步骤来计算:1.预测:利用当前的系统模型以及上一次的状态和控制向量来预测下一步的状态变量。
2.更新:根据测量向量来更新状态变量,并利用卡尔曼增益来确定测量向量和预测向量之间的误差,并将误差减去。
3.重复:重复以上两个步骤直至计算出最后的状态向量。
基于Kalman滤波的GPSSINS组合式无人机导航研究与实现
基于Kalman滤波的GPS/SINS组合式无人机导航研究与实现导航与定位一直是国内外军用和民用领域研究的热点,在载体平台智能化不断升级过程中单一性导航系统已经很难满足技术应用与发展的要求,因此,多系统的组合式导航方式在科研领域越来越受到学者们的关注。
本文通过对全球卫星定位系统和捷联式惯导系统进行深入分析各自存在的优缺点后,对两系统使用Kalman滤波算法实现组合定位,集成两者之间的主要优点,进行优势互补,能够
保证系统较高的精度与可靠性,使其总体性能远远大于单一独立系统。
首先,本文阐述了课题的研究目的和研究意义,对国内外组合导航的发展近况做出了分析,并对论文文各章节所完成的主要工作进行了说明。
其次,分别研究了 GPS和SINS各自工作的原理,对运行中涉及到的坐标系进行了介绍并给出了转换方法,对影响GPS定位精度的误差源进行了逐一分析并给出了相应的改正模型;分析了 SINS的力学编排、基于“四元数”算法的SINS姿态更新方程、速度更新方程以及位置更新方程,并给出误差方程,根据实际情况设计了载体运行轨迹,进行了实验验证。
然后,通过对载体工作环境进行分析,设计了一种适用于短时间运行的组合式导航松耦合数学模型,并对Kalman滤波进行介绍并给出了滤波流程,经测试结果表明采用经结合后的系统即能够解决SINS长时间累积误差发散的问题,又能够避免单独使用GPS刷新率较低的不足,保证了在导航定位的实时性和精确性。
最后,对论文进行总结,得出该设计方案能够满足低成本、微小型载体平台的需求,并且对今后下一步工作进行了展望。
基于自适应迭代扩展卡尔曼滤波算法的INSBDS组合导航系统

惯性导航系统(Inertial Navigation System ,INS )和北斗卫星导航系统(Beidou Navigation Satellite System ,BDS )是目前两种重要的舰船导航系统。
惯性导航系统(INS )是自主导航系统,仅依靠自身就能进行连续的导航和定位,具有自主、隐蔽等特性,所获取舰船的运动信息完备,但其定位误差是积累的,随着时间的积累而不断增大[1]。
北斗卫星导航系统(BDS )的定位精度系统与第3代GPS 定位精度相当,具有观测时间短、定位连续、精度高、误差不随时间积累等优点,可提供覆盖全球的精准定位、导航和授时(Positioning ,摘要为克服惯性导航系统(INS)的积累误差,提高误差的修正精度,提出了基于多天线北斗差分载波相位的北斗/惯性导航系统组合导航算法。
该算法建立并线性化惯性导航系统(INS)和北斗导航系统(BDS)的状态方程和量测方程,对系统的运动状态参数应用自适应迭代扩展卡尔曼滤波(adaptive iterated extended Kakman filter ,AIEKF)算法进行估计。
仿真结果表明,自适应迭代扩展卡尔曼滤波算法能够提高INS/BDS 组合导航系统的精度和抗干扰能力,验证了自适应迭代扩展卡尔曼滤波算法的有效性。
关键词INS;BDS;组合导航;自适应卡尔曼滤波中图分类号:U666.1文献标识码:A DOI :10.19694/ki.issn2095-2457.2020.04.81基于自适应迭代扩展卡尔曼滤波算法的INS/BDS 组合导航系统INS/BDS Integrated Navigation System Based on Innovation-based Estimation Adaptive Kalman Filter Algorithm张源詹金林韩冰陈伟ZHANG Yuan ZHAN Jinlin HAN Bing CHEN WeiAbstractTo achieve high accuracy for INS,this paper presents an INS/BDS adaptive navigation system for marine application.BDS with multi-antennas Dual-Differential carrier phase observation model provides vessel ’s altitude and is selected as the auxiliary navigation system to fuse with INS to obtain better estimation accuracy of INS errors.In oder to solve the degradationperformance of integrated navigation system caused by BDS unstable measurement disturbs,a novel innovation-based adaptive estimation (AIE)kalman filtering approach is proposed.Simulation results show that the novel innovation-based adaptive estimation kalman filtering surpasses thestandard kalman filter with better accuracy,robustness and lesscomputation.Key wordsInertial navigation system;BDS;Integrated navigation system;Adaptive kalman filter;Innovation-based adaptive estimation张源海军士官学校(蚌埠233012)詹金林海军士官学校(蚌埠233012)韩冰海军士官学校(蚌埠233012)陈伟海军士官学校(蚌埠233012). All Rights Reserved.Navigation and Timing,PNT)服务[2]。