ZCLJ25A型力矩电机控制器使用说明
常州兰陵Z型电动执行机构使用说明书样本

1.概述多回转阀门电动执行机构,通称为Z型。
合用于启闭件做直线运动阀门,如闸阀、截止阀、隔膜阀、闸门、水闸阀等。
用于阀门启动、关闭或调节。
是对阀门实现远控、集控和自控必不可少驱动装置。
她们具备功能全、性能可靠、控制系统先进、体积小、重量轻、使用维护以便等特点。
广泛用于电力、冶金、石油、化工、造纸、污水解决等行业。
多回转电动执行机构有:户外型、隔爆型、整体型、整体调节型、隔爆整体型、隔爆整体调节型等。
按连接型式,还分为转矩型和推力型。
本产品性能符合JB/T8528-1997《普通型阀门电动装置技术条件》规定。
隔爆型性能符合GB3836.1-《爆炸性气体环境用电气设备第1某些:通用规定》,GB3836.2-《爆炸性气体环境用电气设备第2某些:隔爆型“d”》及JB/T8529-1997《隔爆型阀门电动装置技术条件》规定。
并经国家防爆电气产品质量监督检查测试中心检定,获得了全系列防爆合格证。
经中华人民共和国国家质量监督检查检疫总局批准获得全国工业产品生产允许证。
2.型号表达办法型号示例:1. 30I-18/50W:表达电动执行机构为多回转,输出转矩300N·m(30kgf·m),电站型接口,输出转速18r/min,最大转圈数50,户外型。
2. Z45T-24/120BS:表达电动执行机构为多回转,带手动二级减速装置,输出转矩450N·m(45kgf·m),推力型接口,输出转速24 r/min,最大转圈数120,隔爆型。
3. Z120-24/80T:表达电动执行机构为多回转,输出转矩1200N·m (120kgf·m),输出转速24 r/min,最大转圈数80圈,整体调节型。
3.工作环境和重要技术参数3.1 电源:常规:单相220V、三相380V,远程DC24V (50Hz)特殊:单相110V、三相415V、660V,(50Hz、60 Hz)3.2 工作环境:3.2.1 环境温度:-20~+60℃(特殊订货-60~+80℃)。
JD、JZT、ZLK、ZTK 系列 电磁调速电动机控制装置 说明书

JD、JZT、ZLK、ZTK系列电磁调速电动机控制装置J D、JZT、ZLK、ZTK系列电磁调速电动机控制器是原机械工业部全国联合(统一)设计产品,用于电磁调速电动机(滑差电机)的调速控制,实现恒转矩无级调速。
本控制器只适用于滑差电机不适用于普通电机。
1 适用范围3.1 调速范围电源:~220V(±10%),50Hz或60Hz、100r/min~1300r/min3.2 转速变化率(机械特性硬度)≤2.5%;3.3 稳速精度:≤1%;3.4 最大输出:DC90V,8A;3.5 控制电机功率:0.55kW90kW;3.6 测速发电机三相中频电压转速比:≥2V/100r/min。
~JD、JZT、ZLK、ZTK □□-□被控电动机最大功率(W)A:手操普通型 B:手操精密型设计序号(1-指针式 2-数显式 3和4-指针式,容量不同见表3)电磁调速电机控制器5%负载下的转-100%负载下的转速额定转速转速变化率=×100%3 主要参数及技术性能2 型号及含义插头号码1234567连接对应的名称~220V~220V离合器激励绕组F1离合器激励绕组F2测速发电机输出端U测速发电机输出端V测速发电机输出端W222注:F1、F2选用导线(推荐)0.55kW~40kW:1mm铜导线;45kW-90kW:1.5mm铜导线;U、V、W 导线选用 (推荐)0.75mm2或1mm铜导线。
型号电源电压最大输出定额(直流90V)可控制电动机功率(kW)测速发电机转速变化率稳速精度调速范围(r/min)JD A-11~220V(±10%) 50Hz~60Hz3.15A0.55~11三相中频电压转速比为≥2V/100r/min≤2.5%≤1%1300~1003.7 手操普通型12JD A-405A15~401300~100JD A-90*8A45~901300~130表 11212F3.8 手操精密型型号电源电压最大输出定额(直流90V)可控制电动机功率(kW)测速发电机转速变化率调速范围(r/min)JD B-11~220V(±10%) 50Hz~60Hz3.15A0.55~11三相中频电压转速比为≥2V/100r/min≤1%1300~10012JD B-405A15~401300~100JD B-90*8A45~901300~1303.9 JZT、ZLK-1、ZTK-1技术参数型号电源电压最大输出定额(直流90V)可控制电动机功率(kW)测速发电机转速变化率调速范围(r/min)JZT3~220V(±10%) 50Hz60Hz5A0.5540单相或三相中频电压转速比为≥2V/100r/min≤2.5%1300~100~~JZT48A45901300~130~ZLK-15A0.55401300100~~ZTK-18A45~901300~1305A0.55401300100~~表2表3*:大于8A小于12A时,其工作时间不大于30min。
电机的使用方法和操作流程
电机的使用方法和操作流程1. 选择合适的电机类型在使用电机之前,我们需要正确选择适合的电机类型,以满足特定的应用需求。
下面是几种常见的电机类型:•直流电机(DC Motor):适用于低速高扭矩应用,如机器人、自动化设备等。
•交流电机(AC Motor):适用于高速低扭矩应用,如风扇、泵等。
•步进电机(Stepper Motor):适用于需要精确定位的应用,如3D打印机、机床等。
2. 准备工作在使用电机之前,我们需要进行一些准备工作以确保安全和正确操作。
以下是一些常见的准备工作:•确保电机与所使用的电源电压匹配。
•检查电机是否有损坏或松动的零部件。
•确保电机的接线正确并牢固。
•针对特定应用,可能需要额外的传感器或控制装置。
3. 连接电机将电机连接到电源和控制装置是操作电机的第一步。
以下是连接电机的一般步骤:1.将电机的正极连接到正极,负极连接到负极。
确保连接牢固并没有松动的电线。
2.如果有需要,连接电机的控制线到控制装置。
这些控制线通常用于控制电机的速度、方向、启动和停止等。
3.确保所有的连接都已牢固地固定,并避免电线悬挂在可能被卡住或损坏的地方。
4. 操作电机一旦电机连接好,我们可以开始操作电机了。
以下是一般的操作流程:1.开启电源:打开电源开关,确保电机和控制装置都正常工作。
2.控制信号设置:根据需要,设置控制装置发送给电机的信号,如速度、方向等。
3.启动电机:通过控制装置将电机启动起来。
在启动电机之前,确保周围的工作区域安全,避免发生意外事故。
4.监控运行状态:在电机运行期间,及时监控电机的运行状态,包括温度、振动和噪音等。
如果发现异常情况,及时停止电机并采取相应的措施。
5.停止电机:当不再需要电机运行时,通过控制装置将电机停止。
确保电机完全停下来之后,关闭电源开关。
5. 维护和保养为了延长电机的使用寿命并确保其正常运行,我们需要进行定期的维护和保养工作。
以下是一些常见的维护和保养任务:•清洁:定期清洁电机以去除灰尘和污垢,确保散热效果和电机的正常运行。
ZL30A伺服驱动器使用手册V1-1.2

定位完成判断 0~30000Pulse
转矩限制 参数设定方式
前馈补偿 参数设定方式
控制 位置信号输出 编码器原点(Z 信号)集电极开路输出 输出 控制信号输出 伺服准备好、伺服报警、转速到达/定位完成
控制输入
伺服使能、报警清除、CCW 驱动禁止、CW 驱动禁 止、位置偏差清零/速度选择 1、位置指令禁止/ 速度选择 2、CCW 转矩限制、CW 转矩限制
ALM Do-1 A 后,此引脚与 DG 成为开路。
伺服
引脚与 DG 短路,进入运转状态;
21
SON Di-1 A
激磁
引脚与 DG 开路退出运转状态。
清除 23 位置 CLE Di-1 P 引脚与 DG 短路,清除位置偏差计数器。
偏差
7
引 引脚 引脚 I/O 模
引脚详细说明 脚 名称 符号 类型 式
Do-1
SRDY
+24V 3K
6
1
4
3
DG
驱动器内部
Do-2
CZ
+24V 3K
6
1
4
3
驱动 器内 部
C ZC OM
图表 2‑2 输入输出接口原理图
10
2.6 位置运行模式 CN1 接线图
DC 12~ 24V 伺服使能
清 除异常警报 CCW驱动禁止 CW 驱动禁止
清 除位置偏差 位置指令脉冲禁止
CCW 转矩限制 CW 转矩限制
22 动禁 FSTP Di-1 A 与 DG 短路(NC 接点),FSTP 与 DG 开路即表明 CCW 过
止
行程发生。
CCW 转 12 矩限 FIL Di-1 A 引脚与 DG 短路时,CCW 转矩限制在参数的设置值。
力矩电机的控制方式

力矩电机的控制方式嘿,朋友们!今天咱来聊聊力矩电机的控制方式。
这力矩电机啊,就像是一个特别能干的小力士,咱得知道怎么指挥它,才能让它乖乖听话,好好干活儿呢!你想啊,力矩电机就像是一匹千里马,咱得有合适的缰绳和驾驭方法,才能让它在咱需要的道路上飞奔起来。
那怎么控制它呢?首先呢,就是直接控制。
这就好比你直接告诉小力士:“嘿,给我往这儿使力!”简单直接,它就会按照你的要求去输出力矩。
就像你让小狗坐下,它就乖乖坐下一样。
然后还有电流控制呢。
这电流就像是小力士的食物,给它多少电流,它就有多大的力气。
你给多了,它可能就使大劲了,给少了呢,它可能就有点懒洋洋的啦。
这可得把握好度,不然它可要不听话咯!再说说磁场控制吧。
这磁场就像是小力士周围的氛围,好的磁场能让它更有干劲,不好的磁场可能就让它有点没精打采的。
咱得给它营造一个好的磁场环境,让它开开心心地干活呀!还有速度控制呢。
你想啊,小力士跑快了不行,跑慢了也不行,咱得让它按照合适的速度来工作。
这就像你骑自行车,太快了容易摔倒,太慢了又着急,得找到那个刚刚好的速度。
那咱在控制力矩电机的时候可得注意啦,不能马虎。
就跟你照顾小宠物似的,得细心、耐心。
要是不小心弄错了控制方式,那可就糟糕啦,说不定小力士就发脾气不干了呢!咱得把力矩电机当成自己的好伙伴,了解它的脾气,知道怎么跟它相处。
这样它才能在咱需要的时候发挥出最大的作用呀!你说,这力矩电机的控制方式是不是很有意思呢?就像玩游戏一样,得掌握好技巧才能玩得转。
咱可不能小瞧了它,它可是能帮咱干很多大事儿的呢!所以啊,咱得好好研究研究,怎么才能让它更好地为咱服务。
怎么样,你是不是也对力矩电机的控制方式有了更深的了解呢?是不是觉得它很神奇呀?反正我是这么觉得的,哈哈!。
谈谈对力矩电机控制器的理解
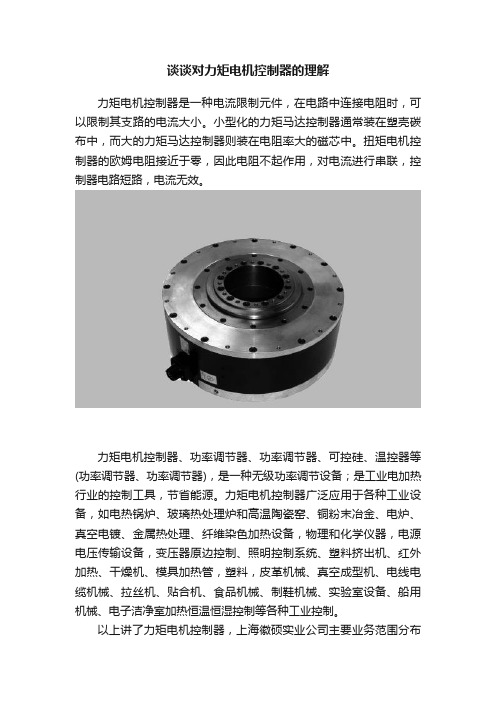
谈谈对力矩电机控制器的理解
力矩电机控制器是一种电流限制元件,在电路中连接电阻时,可以限制其支路的电流大小。
小型化的力矩马达控制器通常装在塑壳碳布中,而大的力矩马达控制器则装在电阻率大的磁芯中。
扭矩电机控制器的欧姆电阻接近于零,因此电阻不起作用,对电流进行串联,控制器电路短路,电流无效。
力矩电机控制器、功率调节器、功率调节器、可控硅、温控器等(功率调节器、功率调节器),是一种无级功率调节设备;是工业电加热行业的控制工具,节省能源。
力矩电机控制器广泛应用于各种工业设备,如电热锅炉、玻璃热处理炉和高温陶瓷窑、铜粉末冶金、电炉、真空电镀、金属热处理、纤维染色加热设备,物理和化学仪器,电源电压传输设备,变压器原边控制、照明控制系统、塑料挤出机、红外加热、干燥机、模具加热管,塑料,皮革机械、真空成型机、电线电缆机械、拉丝机、贴合机、食品机械、制鞋机械、实验室设备、船用机械、电子洁净室加热恒温恒湿控制等各种工业控制。
以上讲了力矩电机控制器,上海徽硕实业公司主要业务范围分布
在华北、华南、华中、东北主要城市,并在上海和大连、深圳设立公司,贵司销售的产品分为直线电机、直线模组、伺服电机、电动滑台、DD马达等,为客户提供更快速、更专业、更完善的技术支持和售后服务。
如果有力矩电机的需求,可以联系我们。
系列力矩型力矩限制器调试方法

系列力矩型力矩限制器调试方法力矩型力矩限制器是一种用于保护动力传动系统的重要装置,可在机械设备受到过大或过小的力矩加载时,自动启动保护功能,以防止设备的损坏。
适当的调试力矩型力矩限制器对于确保设备的安全运行至关重要。
下面将介绍一种系列力矩型力矩限制器的调试方法。
第一步:准备工作在进行调试之前,需要对力矩型力矩限制器进行检查和准备工作。
首先,检查力矩型力矩限制器的外观,确保其外壳完好无损。
然后,检查传感器,确保其连接良好,没有松动或接触不良的情况。
最后,检查控制系统的连接,确保其电缆和接头没有损坏。
第二步:调试参数设置在调试之前,需要根据实际应用设置合适的参数。
参数包括最大允许的力矩值、启动和停止的延迟时间以及报警和断电的停机时间。
这些参数需要根据设备的类型和使用情况来确定。
根据使用说明书或者制造商提供的参数设置手册,进行相应的参数设置。
第三步:力矩限制器重置在调试之前,需要将力矩型力矩限制器进行重置。
重置方法可以是机械重置或者电子重置。
对于机械重置,需要手动将力矩型力矩限制器的手柄或者按钮旋转到复位位置。
对于电子重置,需要通过控制系统发送特定的重置信号来进行重置。
重置后,力矩型力矩限制器将返回到正常工作状态。
第四步:力矩加载检测在调试过程中,需要逐步加载力矩,以测试力矩型力矩限制器的保护功能。
首先,确保设备处于停机状态。
然后,逐步增加力矩,同时观察力矩型力矩限制器的工作状态。
当加载到预设的力矩值时,力矩型力矩限制器将启动保护功能,比如触发警报或者切断动力传动装置。
确认保护功能正常后,逐步减小力矩,直到力矩型力矩限制器恢复正常。
第五步:测试警报和停机功能在调试过程中,需要测试警报和停机功能的可靠性。
通过设置一个低于预设力矩值的力矩加载值,观察力矩型力矩限制器是否发出警报信号。
同时,观察是否能够在预设的停机时间内切断动力传动装置。
如果警报和停机功能正常,则可以确认力矩型力矩限制器的调试工作已经完成。
力矩电动机的调节方法
力矩电动机的调节方法
什么是力矩电动机?
力矩电动机是一种能够通过控制电流和电压以调节输出力矩大小的电机。
它可以在低转速下输出高扭矩,因此被广泛应用于起重、牵引、搅拌、压缩等机械设备中。
力矩电动机的调节方法
磁场调节法
磁场调节法是通过改变磁场的强度、方向和位置以调节电机输出力矩大小的方法。
具体来说,可以利用电磁铁或调节电阻器的方式改变电机磁场的大小和方向,从而影响电机的输出扭矩。
电流调节法
电流调节法是通过改变电机的电流以调节电机输出力矩大小的方法。
一般情况下,电流与输出力矩成正比,因此通过改变电流的大小和方向可以调节电机输出力矩的大小和方向。
转速调节法
转速调节法是通过改变电机的转速以调节电机输出力矩大小的方法。
一般情况下,电机输出功率等于转矩乘以转速,因此通过改变转速的大小和方向可以改变电机的输出功率和力矩。
总结
力矩电动机是一种能够输出高扭矩的电机,在机械设备中被广泛应用。
在调节力矩电动机时,可以采用磁场调节法、电流调节法和转速调节法等多种方法。
不同的调节方法适用于不同的场景,要根据具体情况选择合适的方法进行调节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图<1>安装尺寸
L1L2L3
模块5.1K/2W ZCLJ25A 型力矩电机控制器使用说明
一.简述
本控制器是专为控制力矩电机而设计的一种新型的电子调压装置。
控制器采用可控硅控制、电压负反馈控制系统实现电机无级调速,具有电压调节平稳、启动性能好、体积小、重量轻、安装维修方便等特点。
广泛应用于包装、印刷、纺织、塑料、造纸、冶金、电线电缆、拉丝等机械设备行业。
二.主要技术指标
1.输出电压范围:AC45V ~370V
2.最大输出电流:25A
3.输出电压精度:>97%
4.三相输出不对称性:≤3%
5.输入控制方式:
l)由电位器手动调节输入控制信号 2)DC0~10V 控制信号输入 6.散热方式:风冷强排 三.使用环境
环境温度:-10℃~+40℃ 相对湿度:<90%。
四.外形尺寸及安装方式
安装方式:将控制器平放或侧放于电控柜内,通过四个安装
孔直接安装,控制器与其他装置之间水平方向至少留有5cm 空间,垂直方向与其他部件至少有10cm 空间,以充分散热。
五.
六.接线示意和接线要求:
如图(3),X2的 端子3、4、5接电位器(5.1K Ω/2W) 作为手动控制信号。
当外部控制装置的输出0~10V 电压作为控制信号时,由端子6(-)、7(+)输入。
X1的端子1、2为220V 的风机电源输入端。
图(4)为主控回路接线示意图,X3的端子L1、L2、L3接三相输入,U 、V 、W 接三相输出。
-W L2L3U V L1X3AC380V ( 输入 )AC45V-370V
( 输出 )图<4>图<3> AC220V 风机电源X121 5.1K/2W 电位器
手动设定X254376-+
七.注意事项:
1.决不允许将380V三相输入电压接三相输出U、V、W端,接错会烧毁控制器;决不允许三相输人电压有缺相,否则会发生电机工作时异常。
2.主回路和控制回路接线时不允许端子松动。
本力矩控制器内部无熔断器、热继电器,用户必须自行安装。
3.控制信号线要用屏蔽线,且屏蔽层要可靠接地。
信号线尽量避免与强电控制线缆长距离平行走线以及捆扎在一起,以免引起干扰,产生误动作。
4.本控制器采用风冷散热,安装控制器时在风扇的垂直方向必须留有足够的散热空间。
八.简单故障判别
1.通电后电机不转:
a) 检查有无控制信号输入
b) 检查电机是否由于负载过大,发生堵转
2.通电后电机立即高速运行
a) 检查是否为控制信号已加在最大
b) 检查是否把端子“5”的+10V接入了控制输入端。
3.通电,电机抖动
a) 检查是否为控制信号线接头松动
b) 检查是否为三相电源缺相。