控制系统的信号流图和梅森公式
控制系统的信号流图和梅森公式.
x5
f
x1
a
d
x2
b
x3
c
x4
e
g
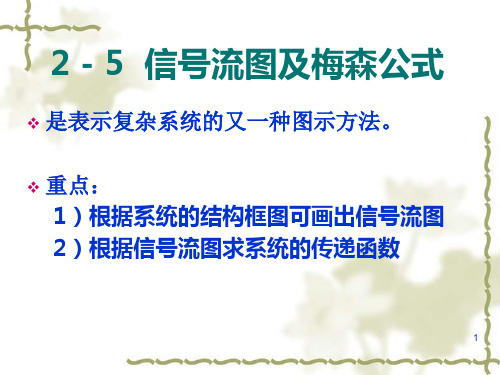
回路:通路与任一节点相交不多于一次,但起 点和终点为同一节点的通路称为(单独)回路。
11:29
电子信息工程学院
x5
f
x1
a
d
x2
b
x3
c
x4
e
g
回路:通路与任一节点相交不多于一次,但起 点和终点为同一节点的通路称为(单独)回路。
11:29
电子信息工程学院
x5
f
x1
a
d
x2
b
x3
c
x4
e
g
回路:通路与任一节点相交不多于一次,但起 点和终点为同一节点的通路称为(单独)回路。 不接触回路:各回路间没有公共节点的回路。 回路增益:回路中所有支路增益的乘积。一般用 La表示。
11:29 电子信息工程学院
x5
f
x1
a
d
x2
b
x3
c
x4
e
g
前向通路:信号从输入节点到输出节点传递时, 每个节点只通过一次的通路。
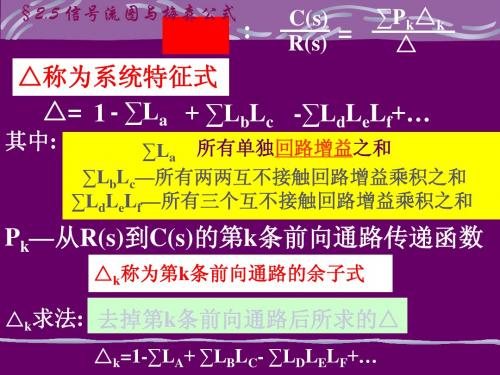
input node (source) a12 x1
1
a53
a32
2
a43
3
a44
4
x2
a23
x3
a34 a24
x4 a45 a25
5
1
Output node
x5
x6
单独回路(7个)
x4 x4
x2 x3 x2
不接触回路(2组)
x2 x3 x2 和 x4 x4
自动控制原理第二章梅森公式-信号流图课件
ABCD
然后,通过分析梅森公式 的各项系数,确定系统的 极点和零点。
最后,将梅森公式的分析 结果转换为信号流图,进 一步明确系统各变量之间 的传递关系。
梅森公式在信号流图中的应用实例
假设一个控制系统的传递函数为 (G(s) = frac{s^2 + 2s + 5}{s^2 + 3s + 2})
在信号流图中,将极点和零点表示为相 应的节点,并根据梅森公式的各项系数 确定各节点之间的传递关系。
02
信号流图基础
信号流图定义与构成
信号流图定义
信号流图是一种用于描述线性动 态系统数学模型的图形表示方法 ,通过节点和支路表示系统中的 信号传递和转换过程。
信号流图构成
信号流图由节点和支路组成,节 点表示系统的动态方程,支路表 示输入输出之间的关系。
信号流图的绘制方法
确定系统动态方程
根据系统描述,列出系统的动态方程。
2
梅森公式与信号流图在描述和分析线性时不变系 统时具有互补性,二者可以相互转换。
3
信号流图能够直观地表示系统各变量之间的传递 关系,而梅森公式则提供了对系统频率特性的分 析手段。
如何使用梅森公式进行信号流图分析
首先,将系统的传递函数 转换为梅森公式的形式。
根据极点和零点的位置, 判断系统的稳定性、频率 响应特性等。
在未来研究中的可能发展方向
随着科技的不断进步和应用需求的不断变化,控制系统面临着越来越多的 挑战和机遇。
在未来研究中,可以利用梅森公式和信号流图进一步探索复杂系统的分析 和设计方法,提高系统的性能和稳定性。
同时,随着人工智能和大数据技术的应用,可以结合这些技术对控制系统 进行智能化分析和优化设计,提高系统的自适应和学习能力。
(电气)自动控制原理5(数学模型)
bmsm +…+
b1s + b0
《自动控制原理》
第二章 控制系统的数学模型
R(s)
Y(s)
前向传递函数:
G1G2G3G4 Y ( s) = Ea ( s) 1 − G3G4 H1 + G2G3 H2
《自动控制原理》
第二章 控制系统的数学模型
例2.3 对下图所示的框图化简,确定系统的前 向传递函数、开环传递函数和闭环传递函数。
G1G2G3G4 1-G3G4H1+G2G3H2 H3
《自动控制原理》
第二章 控制系统的数学模型
得
dn y d n−1 y dy + an−1 n−1 + L+ a1 + a0 y = b0 r n dt dt dt
& x1 = x 2
& x2 = x3 & x3 = x4 M & xn−1 = xn
d n−1 y xn = n−1 dt
& xn = −a0 x1 − a1 x2 − L− an−1 xn + b0r
⎡1 iR = ⎢ ⎣R
《自动控制原理》
⎤ ⎡V C ⎤ 0⎥ ⎢ ⎥ , D = 0 ⎦ ⎣ iL ⎦
第二章 控制系统的数学模型
线性时变系统的状态空间模型
& ⎧ x(t) = A(t)x(t) + B(t)u(t) ⎨ ⎩ y(t) = C(t)x(t) + D(t)u(t)
非线性系统的状态空间模型
H2
R(s)
G1
信号流图与梅森公式
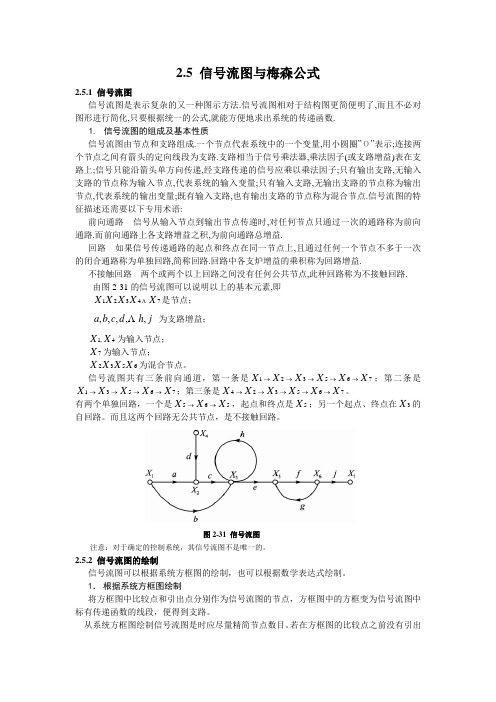
2.5 信号流图与梅森公式2.5.1 信号流图信号流图是表示复杂的又一种图示方法.信号流图相对于结构图更简便明了,而且不必对图形进行简化,只要根据统一的公式,就能方便地求出系统的传递函数.1. 信号流图的组成及基本性质信号流图由节点和支路组成.一个节点代表系统中的一个变量,用小圆圈”Ο”表示;连接两个节点之间有箭头的定向线段为支路.支路相当于信号乘法器,乘法因子(或支路增益)表在支路上;信号只能沿箭头单方向传递,经支路传递的信号应乘以乘法因子;只有输出支路,无输入支路的节点称为输入节点,代表系统的输入变量;只有输入支路,无输出支路的节点称为输出节点,代表系统的输出变量;既有输入支路,也有输出支路的节点称为混合节点.信号流图的特征描述还需要以下专用术语:前向通路 信号从输入节点到输出节点传递时,对任何节点只通过一次的通路称为前向通路.而前向通路上各支路增益之积,为前向通路总增益.回路 如果信号传递通路的起点和终点在同一节点上,且通过任何一个节点不多于一次的闭合通路称为单独回路,简称回路.回路中各支炉增益的乘积称为回路增益.不接触回路 两个或两个以上回路之间没有任何公共节点,此种回路称为不接触回路. 由图2-31的信号流图可以说明以上的基本元素,即 74321X XX X X是节点;j h d c b a ,,,,, 为支路增益;4,1X X 为输入节点;7X 为输入节点;6532X X X X 为混合节点。
信号流图共有三条前向通道,第一条是765321XXXXXX →→→→→;第二条是76531X XXXX →→→→;第三条是765324X XXXXX→→→→→。
有两个单独回路,一个是565X X X →→,起点和终点是5X ;另一个起点、终点在3X 的自回路。
而且这两个回路无公共节点,是不接触回路。
图2-31 信号流图注意:对于确定的控制系统,其信号流图不是唯一的。
2.5.2 信号流图的绘制信号流图可以根据系统方框图的绘制,也可以根据数学表达式绘制。
2-5 信号流图与梅森公式
G12 ( s ) R2 ( s )
G21 ( s )
C2 ( s ) G22 ( s )
G22 ( s )
+
+
C2 ( s )
5
2、根据线性代数方程组绘制。 设一组线性方程式如下:
x1 x1 x2 ax1 dx2 ex3 x3 x4 x5 bx2 cx3 x5
8
Σ Li:所有各回路的“回路传递函数”之和; Σ LiLj:两两互不接触的回路,其“回路传递 函数”乘积之和; Σ LiLjLk:所有三个互不接触的回路,其“回 路传递函数”乘积之和; n:前向通道数;
9
注意事项:
“回路传递函数”是指反馈回路的前 向通路和反馈回路的传递函数的乘积, 并且包含代表反馈极性的正、负号。
结论:开环传递函数等于前向通路传递函数G(s)和反馈 通路传递函数H(s)的乘积。
30
推广到一般情况:
b m s m b m 1s m 1 b1s b 0 G(s)H(s) a n s n a n 1s n 1 a 1s a 0
2 2 Π( τ i s 1) Π( τ di s 2ζ di τ d s 1) i 2 s ν Π(Ti s 1) Π(Tni s 2ζ ni Tni s 1) i 1 i 1 i 1 ρ i 1 σ u η
26
例3:画出信流图,并利用梅逊公式求取它 的传递函数C(s) / R(s)。
R (s)
+
A
_
1 R1
+
-
B
1 C1 s
C +
D _
1 R2
E
1 C2 s
§2.5 信号流图与梅森公式
e
g
a f
b
c
h
C(s)
前向通路两条
四个单独回路, 四个单独回路,两个回路互不接触 ab c d + e d (1 – b g) C(s) = – a – bg – c – R(s) 1 f h e h g f + af c h
— ∑L
a
Pk—从R(s)到C(s)的第 条前向通路传递函数 的第k条前向通路传递函数 从 到 的第
称为第k条前向通路的余子式 △k称为第 条前向通路的余子式
求法: 去掉第k条前向通路后所求的 △k求法 去掉第 条前向通路后所求的△ 条前向通路后所求的△
△k=1-∑LA+ ∑LBLC- ∑LDLELF+…
P2= G4G3
L4= – G4G3
P1=G1G2G3
L1= –G1 H1 L2= – G3 H3 L5 = – G1G2G3
L3= – G1G2G3H3H1
L1L2= (–G1H1) (–G3H3) = G1G3H1H3
L1L4=(–G1H1)(–G4G3)=G1G3G4H1
G3(s) R(s) R(s) R(s) R(s) G3 (s) E(S)G(s) G33(s) E(S) E(S) E(S) GG (s) 1 (s) G(s)
1 1
梅逊公式求E(s) 梅逊公式求
N(s) N(s) N(s)
G2(s) G2(s) G22(s) G (s) HH (s) 2 (s) H(s) 2 2 C(s) C(s) C(s) C(s)
P2= - G3G2H3 △ 2= 1 P2△2=?
HH (s) 1 (s) H(s) 1 1
H3(s) H3(s) H33(s) H (s)
控制工程基础6-第2章 (数学模型-4:信号流图及梅逊公式)
1 R E
G1
Q
G2
O
1
C
R(s ) 1 R( s )
1
×G
G5
H
1
G6 G3 -H 1 G4 1 C (s )
G2 -H2
三个回路
梅森公式
C ( s) 1 n pk k R( s) k 1
△为特征式,其计算公式为
D= 1 - 邋 1 + L
其中:
L2 -
L3 +
n 为从输入节点到输出节点间前向通路的条数;
R(s)
E ( s) B( s)
G1 ( s )
G2 ( s )
C (s)
1 R E
N 1
G1
Q
G2
O
1
C
H (s)
H
信号流图常用的名词术语
(1)输入节点(源节点):只有输出支路而没有输入支路 的节点,称为源节点。它一般表示系统的输入变量,亦称 输入节点,如图中的节点R和N。 (2)输出节点(阱节点):只有输入支路而没有输出支 路的节点,称为阱节点。它一般表示系统的输出变量,亦 称输出节点,如图中的节点C (3)混合节点:既有输入支路又有输出支路的节点, 称为混合节点,如图中的节点E,Q,O
6
R(s) 1
G1 2
G2 3
G3 4
G4 H1 5
G5 6
C(s)
解:前向通路有3个
1 2 3 4 5 6
1 2 4 5 6来自H2P1 G1G2 G3G4 G5
2 1
1 1
P2 G1G6 G4 G5
1 2 3 6
P3 G1G2 G7
25控制系统的信号流图和梅森公式
15
例 绘制RLC电路的信号流图,设电容初始电压为uo(0), 回路中电流的初始值为i(0)。
16.04.2019
16
1 列写网络微分方程式如下:
d it () L R it () u t- u () t + = i() o d t
C
duo (t ) =i(t ) dt
2 方程两边进行拉氏变换:
d x5 f
x1
a
x2
b x3
c
x4
e
16.04.2019
13
2 对于一个给定的系统,由于描述同一个系统的方 程可以表示为不同的形式,因此信号流图不是唯一 的。 3 混合节点可以通过增加一个增益为 1 的支路变成 为输出节点,且两节点的变量相同。
x5 1
x1
a
x2
d
b x3
c
x4
e
16.04.2019
互不接触的回路L1 L2。所以,特征式
= 1 ( L + L + L + L ) + L L 1 2 3 4 1 2
33
16.04.2019
G6 R(s) G1 G2 G3
G7 G4 G5 C(s)
a
b
c
-H1
d
-H2
前向通道有三个:
P G G G G G 1= 1 2 3 4 5
1 1
16.04.2019 27
例1 利用梅森公式,求:C(s)/R(s)。
16.04.2019
28
G6
R(s)
G7
G3
G1 a
G2 b
G4 c
-H1 -H2
G5
d
梅森公式-信号流图
L4 a23a34a45a52
x5 L5 a23a35a52
P
a12 a23a34 a45 (1 a44 )a12 a23a35
1 (a23a32 a23a34a42 a44 a23a34a52 a23a35a52 ) a23a32 a44 a23a35a52a44
G3(s)
梅逊公式求E(s)
R(s)
E(SG)GG3(33s(()ss))
RRR(s(()ss)) EEE(S((S)S))
P2= - G3G2H3
GGG1(11s(()ss))
△2= 1 P2△2=?
HHH1(11s(()ss))
G1(s)
NNN((s(ss)))
G2(s)
GGG2(22s(()ss))
CCC(s(()ss))
HHH2(22s(()ss)) H3(s)
HHH3(33s(()ss))
C(s)
R(s)
E(S) P1=H–P1G(s1)2=H13 △△1=11=+G1 2HH2 2(s)P1△1= ?
E(s)= R(s)[ (1+G2H2) +(- G3G2H3)] +(–G2H3)N(s)
1 G1H1 G2G7 H 2 G6G4G5 H 2 G2G3G4G5 H 2 G4G5G7 H1H 2
x1
x2
x3
x7 I(s) x4
x5
o在源节点上,只有信号输出 支路而没有信号输入的支路,
1/R1 1+R1C1s R2
它一般代表系统的输入变量。
-1
•阱节点(输出节点):
在阱节点上,只有信号输入的支路而没有信号输出的支路,它
自动控制原理--信号流图及梅逊公式应用例题
La d eg bcg
有两个互不接触回路
Lb Lc deg
则 1 d eg bcg deg
f
1. X1 X 4 , p1 aef , p2 abcf
1 1 d, 2 1
X4 X1
1 ( p1 1
p2 2 )
aef (1 d ) abcf 1 d eg bcg deg
4. 闭环系统的误差传递函数 [ 定义误差 E(s)=R(s)-B(s) ]
e (s)
E(s) R(s)
en (s)
E(s) N(s)
1
G 1
1
, N(s) 0
1 (s)G 2 (s)H(s)
E(s)
G 2 (s)H(s) , R(s) 0
G1 (s)G 2 (s)H(s)
e
(s)R(s)
Tr1
x1 xr
1 (d
a(1 e) e cf ) de
Ty1
x1 y
1 (d
bf e cf
)
de
例2.15 已知系统信号流图,求传递函数。
• 解:三个回路:L1 G2H2
-H1
L2 G1G2H2
L3 G 2G 3H1
• 回路相互均接触,则:
R
G1
G2
G3
H2 -H2
G4
例2.13 绘制结构图对应的信号流图(1) 。
Ui(s) (-)
(-)
1 I1(s)
1 U(s)
R1
IC(s) C1s
(-)
1
1
R2 I2(s) C2 s
Uo(s)
Ui(s)
-1
1/R1
1/C1s
IC(s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
16:43
电子信息工程学院
一 信号流图的组成和绘制
对于复杂的控制系统,结构图的简化过程 仍较复杂,且易出错。
信号流图:对系统的结构和信号(变量)传
递过程的数学关系的图解描述。
优点:用梅森公式可以直接写出系统的传递函 数,无需对信号流图进行化简和变换。
16:43 电子信息工程学院
16:43 电子信息工程学院
由系统结构图绘制信号流图的步骤 1)将方框图的所有信号(变量)换成节点, 并按方框图的顺序分布好; 2)用标有传递函数的线段(支路)代替结构 图中的方框。
16:43
电子信息工程学院
画出系统的信流图。
G6
R(s)
G7
G3
G1 a
G2 b
G4
c -H1 d
G5
C(s)Βιβλιοθήκη 16:43U o (s)=
16:43
I (s) uo (0) + C s
电子信息工程学院
U i (s)-U o (s) i(0) I (s)= + R Ls+R s+ L I (s) uo (0) U o (s)= + C s
4 按照方程组绘制信流图
i(0)
1
1 Ls R
uo (0)
1 s
R 1 L
U i ( s)
例3:求系统的传递函数
e
f
a
b g
i
c h
d
单独回路:L1 bg , L2 bci L3 ehg , L4 ei, L5 f , L6 ch
两两互不接触回路:L4 L5 eif 1 bg bci ehg ei f ch eif
16:43 电子信息工程学院
-H2
电子信息工程学院
注意:引出点和比较点相邻的处理
16:43
电子信息工程学院
例 绘制下图所示系统结构图对应的信号流图。
16:43
电子信息工程学院
解: 将结构图的变量换成节 1
点,并按结构图的顺序分 布好; 2 用标有传递函数的线段 (支路)代替结构图中的函 数方框。
G2 ( s)
a
b
c
R(s)
input node (source) a12 x1
1
a53
a32
a43
2
a44
4
x2
a23
3
x3
a34 a24
x4 a45 a25
5
1
Output node
x5
x6
单独回路(7个)
x4 x4
x 2 x3 x 2
不接触回路(2组)
x 2 x3 x 2 和 x 4 x 4
x 2 x5 x3 x 2 和 x 4 x 4
1 U i ( s) U o ( s)
1 C
I (s)
-1
U o (s)
16:43
电子信息工程学院
由系统结构图绘制信号流图
比较点 结构图:输入量
引出点
信号线
方框
输出量
信流图: 输入节点
混合节点
支路
输出节点
信号流图包含了结构图所包含的全部信息, 在描述系统性能方面,其作用是相等的。但是, 在图形结构上更简单方便。
例 绘制RLC电路的信号流图,设电容初始电压为uo(0), 回路中电流的初始值为i(0)。
16:43
电子信息工程学院
1 列写网络微分方程式如下:
L di(t ) +Ri(t )=ui (t )-uo (t ) dt
C
duo (t ) =i(t ) dt
2 方程两边进行拉氏变换:
L[sI (s)-i(0)]+RI (s)=Ui (s)-U o (s)
第二章 控制系统的数学模型
五 信号流图和梅森公式
16:43
1
5 信号流图和梅森公式
项目
学 习 目 的 法。 重 难 点 点
内容
掌握由信号流图利用梅森公式求取传递函数的方
利用梅森公式求取传递函数
闭环系统有关传函的一些基本概念
16:43
电子信息工程学院
本节内容
信号流图的组成和绘制
MASON公式→求系统传递函数
例4 用梅森公式求系统传递函数。
G1 R G2 C
16:43
电子信息工程学院
= 1- ( L1 + L2 + L3 + L4 ) + L1 L2
电子信息工程学院
G6 R(s) G1 G2 G3
G7 G4 G5 C(s)
a
b
c
-H1
d
-H2
前向通道有三个:
P1 = G1G2G3G4 G5
1 1
16:43
电子信息工程学院
G6 R(s) G1 G2 G3
G7 G4 G5 C(s)
e
f
a
b g
i
c h
d
G1 abcd , 1 1 G2 ade, 2 1 f
由梅森公式,得传递函数
C ( s) abcd ade(1 f ) R( s ) 1 bg bci ehg ei f ch eif
16:43 电子信息工程学院
基本组成: 由节点、支路组成
x
G
y
x
G
y
节点:节点表示信号。输入节点表示输入信号,输出 节点表示输出信号。
支路:连接节点之间的线段为支路。支路上箭头方向 表示信号传送方向。传递函数标在支路上箭头的旁边, 称支路增益。
16:43
电子信息工程学院
x5
f
x1
a
x2
b x3
c
x4
d
有关术语
e
输入节点:源节点。只有输出支路。 输出节点:阱节点。只有输入支路。 混合节点:既有输入支路又有输出支路的节点。相 当于结构图中的信号比较点和引出点。它上面的信 号是所有输入支路引进信号的叠加。
d x5 f
x1
a
x2
b x3
c
x4
e
16:43
电子信息工程学院
2 对于一个给定的系统,由于描述同一个系统的方 程可以表示为不同的形式,因此信号流图不是唯一 的。 3 混合节点可以通过增加一个增益为1的支路变成 为输出节点,且两节点的变量相同。
x5 1
x1
a
x2
d
b x3
c
x4
e
16:43
电子信息工程学院
16:43 电子信息工程学院
例1 利用梅森公式,求:C(s)/R(s)。
16:43
电子信息工程学院
G6
R(s)
G7
G3
G1 a
G2 b
G4 c
-H1 -H2
G5
d
C(s)
用梅森公式
该系统中有四个独立的回路:
L1 = G4 H 1
16:43
电子信息工程学院
G6
R(s)
G7
G3
G1 a
G2 b
前向通路增益:前向通路上各支路增益的的 乘积。一般用Gk来表示。
16:43 电子信息工程学院
x5
f
x1
a
d
x2
b
x3
c
x4
e
g
前向通路:信号从输入节点到输出节点传递时, 每个节点只通过一次的通路。
前向通路增益:前向通路上各支路增益的的 乘积。一般用Gk来表示。
16:43 电子信息工程学院
Mixed node
1 1 2 1
3 1 L1
电子信息工程学院
P3 = G1G2G7
16:43
G6 R(s) G1 G2 G3
G7 G4 G5 C(s)
a
b
c
-H1
d
-H2
前向通道有三个:
P1 = G1G2G3G4 G5 P2 = G1G6G4G5
1 1 2 1
3 1 L1
L2 = G2G7 H 2
16:43
电子信息工程学院
G6
R(s)
G7
G3
G1 a
G2 b
G4 c
-H1 -H2
G5
d
C(s)
用梅森公式
该系统中有四个独立的回路:
L1 = G4 H 1 L3 = G6 G4G5 H 2
L2 = G2G7 H 2 L4 = G2G3G4 G5 H 2
x3 x 4 x3
x 2 x 4 x3 x 2
x3 x 4 x5 x3
x 2 x5 x3 x 2
x 2 x 4 x5 x3 x 2
16:43 电子信息工程学院
说明
1 信流图是线性代数方程组结构的一种图形表示, 两者一一对应。
x1 x1 x 2 ax1 dx 2 ex 3 x 3 bx 2 fx 5 x 4 cx 3 x5 x5
m m m
=1-(所有单独回路增益之和)+(任意两个 互不接触回路增益乘积之和)–(任意三个互不接触 回路增益乘积之和)+¨¨¨
16:43 电子信息工程学院
1 N G Σ Gk Δ k Δ k 1
Gk ——N条前向通路中第k条前向通路的增益; Δk——第k条前向通路余因式,即与第k条前向 通路不接触部分的Δ值(特征式); 去掉第K条前向通路后剩余的流图的特征式。 N ——前向通路的总数。
16:43 电子信息工程学院
x5
f
x1
a
d