单轨胶轮车辆减速度闭环控制的制动力分配技术
高速列车车辆制动系统的制动力分配算法研究
高速列车车辆制动系统的制动力分配算法研究随着高速铁路的快速发展,高速列车的运行安全性成为重要的关注点。
在高速列车中,制动系统是确保列车能够安全停车的关键组成部分。
制动力分配算法是制动系统中一个关键的技术,它决定了每个车轮上施加的制动力,以实现列车的平稳停车和避免轮胎滑移。
制动力分配算法要求能够根据列车的运行状态和运行条件合理分配制动力。
它不仅要在列车正常运行时提供稳定的制动力分配方案,还要在紧急情况下能够快速反应并调整制动力的分配,以保证列车的安全停车。
首先,制动力分配算法需要考虑到列车的运行状态。
例如,列车的速度和加速度是决定制动力分配的重要参数。
当列车速度较高且需急刹车时,制动力分配应更为集中,以便快速减速。
而当列车速度较低时,制动力分配可以较为均匀,以避免制动力过大造成轮胎滑移。
其次,制动力分配算法还需要考虑到列车的运行条件。
高速列车运行在不同的轨道条件和气候条件下,因此制动系统需要根据实际情况进行调整。
例如,在雨天或积雪天气下,轨道的摩擦系数会下降,此时制动系统应适当增加制动力以确保列车能在较短的距离内停车。
另外,制动力分配算法还需要考虑到列车的车型和车辆的负载情况。
不同类型的车辆在制动力分配上可能存在一定的差异。
例如,高速旅客列车和货运列车的制动力分配可能有所区别,因为它们的载重和车身结构不同。
制动力分配算法应根据车辆的负载情况进行调整,以保证最佳的制动效果。
为了实现高效的制动力分配算法,可以采用现代控制理论和算法。
例如,可以利用模糊控制、神经网络和遗传算法等方法来优化制动力分配。
这些方法可以根据实际情况进行参数调整和自适应控制,以提高制动系统的性能。
此外,制动力分配算法的实现还需要考虑到列车的制动系统结构和传感器设备。
制动系统通常由制动器、压力控制器、离合器和传感器组成。
这些设备需要相互配合,以实现制动力的准确分配和控制。
总结起来,高速列车车辆制动系统的制动力分配算法是确保列车安全运行的关键因素之一。
城市轨道车辆的制动力管理

2 2 0 ・
工 程科技
城市轨道车辆 的制 动力管理
徐 冰
( 哈 尔滨 地铁 集 团公 司运 营分 公 司 , 黑 龙 江 哈 尔滨 1 5 0 0 3 6 )
摘 要: 城 市轨 道 车 辆 采 用 的 制 动 方 式为 电制 动 和 空 气 制 动 的 混合 制 动 。制 动 力 的 管 理 方 法 一般 为 以 电制 动主 , 优 先行补充, 补充 时平均分配至每个转向架上 ; 在到达列车黏 着极 限时, 剩余制动 力施加在拖 车上 。 关键词 : 城 市轨道 车辆 ; 电制动 ; 空气制动
7 k m / h ) 时, 开始 低速 电空混合 制动 , 牵 引系统 向列 车控制 系 随着我 国城 市建设 的迅速发展 , 城市吸 引力 不断扩 大 , 人 口集 是 5 聚力不断增加 , 大、 中城市人 口 数量屡创新高。 许多城市都选择了建 统发 出电制动退 出信号 ( 电平信号 ) , 转 发给制动系统 , 而后 电制 动 设轨道交通来缓解 城市交通压力 , 改善交通状况 。地铁车辆的运行 开始衰减 , 空气制动开始上升 , 电制动衰减 的斜率 和空气制动上 升 速 度 也 逐 渐 上 升 , 由 最 初 的 6 0 k m / h , 逐 渐 提 高 到 的斜率一致 。牵引系统在 收到电制动退 出指令后 , 按照上述斜率退 在列车速度 降到 l k m / h 左右 , 电制 动完全退出。 8 0 k m/ h , 1 0 0 k m / h , 1 2 0 k m / h , 甚至更高 。列 车在 高速运行 中必 须通过 出电制动 , 制动 系统 来调节速度 , 准确地在预 定点停车 , 以保证列车 的安全运 2 . 5 . 2纯空气制动 的停车制动。当低速 电空转换完成时 , 电制动 行。 完全退 出 , 空气制动完全取代 电制动 。空气制动力的值 取决 于由司 1概 述 控器或者信号系统给出的制动指令 。 制动系统 在此过程 中负责控制 目前城市轨道车辆上 实施 的制 动方式一般都 是电空混合制 动 , 整车冲动限制 。 混合制动 的目的是最小限度地使用摩擦 制动 , 以便减少对车轮 的磨 2 . 5 . 3保持制动施加 。 在人工驾驶模式 、 网络故障和备用模式 下 , 保持制动施加 由制动系统 损。 通过最大限度地使用动 车转 向架上 的电制动力来获得要求 的减 无牵引指令并且 当列车进入静 止状态时 , 速度 , 从 而使摩擦制动 的减速度最小。 自动完成 ; 在列车 自动驾驶模 式下 , 保 持制 动的施加指令 由制 动系 2 制动力的管理 统根据信 号系统 的零速信号和制动级位进行施加。 2 . 1 制动指令 的发 出。列车控制 系统根据 司控器或者列车信号 2 . 5 . 4保持制动缓解 。在人工驾驶模 式和列车 自动驾驶模式 下 , 系统给 出的制动指令( 最大等效减速度百分 比) , 结合从制动 系统获 当以下两种情 况满足任何一种时 , 列 车控制 系统 向制动系统发 出保 得 的各 车包 含转动惯量的车重信息 , 利用公式 F = m a进行总制动力 持制动缓解指 令 : 当有牵 引指 令 , 并且 整车实际施加 的牵 引力大于 不 同载荷下规定 的保持制动缓解的牵引力时 , 缓解保持制动 的牵 引 的计算 , 并把此值 发送 给制动系统 。 2 . 2电制动力分配。列 车控制 系统根据制 动指令 和各车牵 引变 力从 空载到满载载荷线性增加 ; 当有牵引指令 , 并且列 车速度大 于 k m / h时 。 流器 的可用 电制动力信号 , 把计算好 的列 车所需 总制动力分 配给各 l 个牵 引变 流器 。牵引系统结合冲动限制 、 从列 车控制 系统得 到的车 为 防止在人工驾驶模式 和列车 自动驾驶模式下 列车控 制系统 未及时发 出保 持制 动缓解指令 , 制动系统检测 到有牵 引指令且列车 辆载荷及 可用 电制动力大小等条件施加 电制动 。 列车控制 系统 向牵引系统发 出制动状态和制动指令值后 , 牵 引 速度大于 1 ~ 2 k m / h , 自动缓解保持制动 。 系统 向列车控制 系统发送可用电制动力 , 列车控制 系统 将此信号转 在 列车控制系统 与制动系统通讯 故障模式 和备用模式 或 紧急 当制动系统检测到有牵 引指令 时 , 制动 系统 自动缓解 发给制动 系统 , 为防止在电制动建立 阶段 过早补充空气制 动 , 制 动 牵 引模 式下 , 保 持 制 动 。 系统根据电制 动可用信号 , 延时几秒后施 加空气制动力 。制 动系统 根据列车 控制系统发送 的各 动车实际施加 的电制 动力施加空气 制 3 结 论 动 。当所需求的制动力变化 时, 制动系统也要考虑延时补充空气制 城轨 车辆 的制动力实施原则是 电制动优先使用 , 空气制动在 电 动。 当动车的制动控制单元掉线时 , 则列车控制系统不 申请 本车电 制动 的制动力不足时进行补 充,电制动与空气制动实时协调配合 。 制动力 , 制动控制单元根据硬线 指令施加制动 。 当电制动不足时 ,优先 在拖 车和电制动故障 的动 车上补充空气 制 达 到最 大本车需求制动 力后 , 在 电制动正 常的动车平均补充 空 2 . 3空气制动分配 。 列车制动系统负责空气制动力的分配 , 空气 动 , 制动 力的分配原则为 : 当电制 动力 不足时优先在拖车 ( 若此 时有 的 气制动。当车辆速度低于某 一限定值 时 , 电制动逐步由空气制动替 动车 电制动不可用 , 则此车 以拖车处理 ) 补充空气制动 ; 制动系统保 代。同时为了减少对制动时闸瓦的磨耗 , 同时又保 证制动需 求 , 电、 证在此过程中单车不超 出最大黏着限制 。 空制动转换点尽量低。 牵 引系统 和制动系统将 在整 车调试 阶段对 电制动 和空 气制动 以一列 编组 为四动两拖 ( =拖车 :动车 =动车 =动车 =动车 = 的施加及缓解的速率进行调整 , 以满足整车冲动限制 的要求 。 拖车 = ; “ = ” 指 车钩 ) 的地铁列车进行 举例 , 当其施加制动时 , 电空混 2 . 4列车防滑控制 。 当某动车 出现滑行 时 , 牵引系统优先进行 防 合制动的管理根据各个工况具体描述如下 : a .当总 的电制动 力能够满足列车要求 时 , 滑控制 , 轻微 的滑行可 以通过减小 电制动力来修正 。牵 引系统在控 各个 转 向架都 不需要 制电制动力 的同时 , 向列 车控制系统发送 电制动 滑行 信号 , 列车控 补充空气制动 ; 制系统再发送 给制 动系统 , 在 牵引系统 防滑控制 过程 中 , 为防止空 b . 当总 的电制动力之 和不能满足全列车制动力需 求 , 只能满足 气制动补偿 电制动损失值 , 制动 系统按照可用 电制动力值计算需要 动车所需制动 力时 , 则全列各个转 向架上平均补充空气制动; c. 施加 的空气制动力 。若该动车电制动滑行状态持续超过一定 时间 , 当总 的电制动力之和不能满足全 列车制动力需 求时 , 则全列 则制 动系统 向列车控制系统发送 电制动切除指令 , 列 车控制 系统 向 各个转 向架上平均补充空气制动 ,空气制动最大补充到黏着极限 , 该动车牵引 系统发 送电制动切 除信 号 ,牵引系统切 除该动车 电制 剩余制动力在各个拖车转 向架上平均补充空气制动 。 动。 牵 引系统收到 电制动切除信号后 , 应把可用电制 动力置零 , 由空 参考文献 气制 动来进行车辆 防滑控制。 制动系统发 出的电制动切除信号可在 [ 1 ] 智廉清 , 吴培元 , 林 台平等. 近代铁道制动技 术【 M] . 北京 : 中国铁道 列 车静止或者牵引状态时复位。 出版 社 , 1 9 8 3 , 6 -1 7 . 2 . 5停车制动。停车制动分 为四个 阶段 : 低速 电空转换 、 纯空气 『 2 1 饶忠. 列车制动『 M 1 . 北京: 中国铁道 出版社 , 2 0 0 4 . 制动 的停 车制动 、 保持 制动施加 、 保持 制动 缓解 。 2 . 5 . 1 低 速电空转换 。列车制动时 , 在车速降到一定 速度( 一 般
跨座式单轨车辆制动系统集成设计
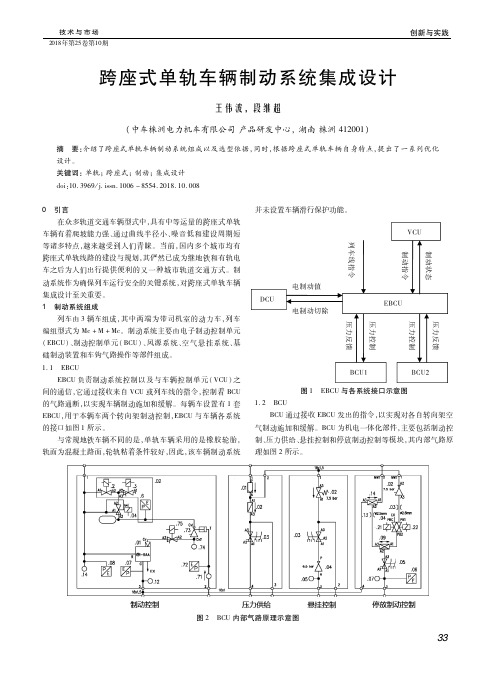
图 !&DHQ内部气路原理示意图
##
创新与实践
!"#$%&'&() *%+ ,*-."! =/08!%$'/8#"$!"#$
&&制动控制部分负责实现常用制动#紧急制动#载荷调节和 制#悬挂控制和停放制动控制等部分$其主要由过滤器! 8"#" #
远程隔离等功能$是制动控制模块内核心部分$每个转向架配 单向阀! 8"!" 和隔离塞门! 8"2" 等部件组成& 悬挂控制部分主
&引言 在众多轨道交通车辆型式中具有中等运量的跨座式单轨
车辆有着爬坡能力强通过曲线半径小噪音低和建设周期短 等诸多特点越来越受到人们青睐 当前国内多个城市均有 跨座式单轨线路的建设与规划其俨然已成为继地铁和有轨电 车之后为人们出行提供便利的又一种城市轨道交通方式 制 动系统作为确保列车运行安全的关键系统对跨座式单轨车辆 集成设计至关重要 &制动系统组成
制动施加和缓解.紧急制动电磁阀! 8"3" 直接由列车安全回路 感器等部件$可实现列车停放制动施加和缓解&
控制$实现列车紧急制动施加和缓解$紧急制动独立于 SDHQ #82&风源系统
设计$大大提高了紧急制动可靠性$从而提升列车安全运行等
风源系统主要为列车制动系统#空气悬挂系统和车钩操作
级& 电磁阀! 84%" 可通过排空制动缸预控压力$以实现远程隔 系统等提供满足要求的压缩空气$其主要由空气压缩机#干燥
列车由 2 辆车组成其中两端为带司机室的动力车列车 编组型式为 AF`A`AF 制动系统主要由电子制动控制单元 SDHQ 制动控制单元 DHQ 风源系统空气悬挂系统基 础制动装置和车钩气路操作等部件组成 #8#&SDHQ
城轨车辆常见制动系统—KBWB制动系统

二 列车制动力分配
KBWB型制动控制系统
上海明珠线AC03型列车采用的是“拖车空气制动滞后控制”(分散 式滞后充气制动控制)。这种控制方法是:拖车所需制动力由动车的电 制动承担,根据空电联合制动运算,不足部分也由动车的空气制动力先 补充,最后才使用拖车的空气制动。列车制动开始,首先由全部动车进 行电制动,如果动车电制动力不能满足制动减速度的要求,那么动车上 的空气制动先进行补充。但动车空气制动的补充受到该车载重的限制, 因为电制动力的设定不能超过空气制动力的黏着限制,而空气制动力的 黏着限制比电制动的期望黏着系数低得多。
KBWB型制动控制系统消磁,压
缩空气向制动缸充气,通气电 磁阀C加电励磁,阀板处于右侧, 压力空气经进气口进入通气电 磁阀C内,作用于膜板通气阀1 上,推动膜板通气阀1下移,关闭 进气口与输出口1的通路,此时, 处于保压状态。
KBWB型制动控制系统
一 空气制动单元BCU
KBWB型制动控制系统
二、称重阀
(1)作用:称重阀又称空重车调整阀,是接收来自空气弹簧的压力 (车辆载荷信号),限制BCU的空气压力输出,是一种混合压力限制装置。
(2)动作时间:常用制动时不起作用;紧急制动时起作用。 空气弹簧破损等原因造成无压力输出时,无论车辆处于哪种工况,称 重阀均认为车辆在超载工况下,BCU控制列车施加紧急制动。
一 空气制动单元BCU
(3)排气 排气电磁阀A加电励
磁,阀板处于右侧,原先 输出口1的压力反过来克服 弹簧的向下压力,顶开排 气阀,使输出口的空气从 排气口出去。排气阀上部 压力经A排入大气。
KBWB型制动控制系统
一 空气制动单元BCU
由于通气电磁阀C 加电励磁,阀板处于右 侧,压力空气经进气口、 通气电磁阀C进入膜板 通气阀1上部,推动膜 板通气阀1下移,关闭 进气口与输出口的空气 压力。
电子导向胶轮列车制动系统设计

电子导向胶轮列车制动系统设计摘要:本文介绍了电子导向胶轮列车制动系统的组成和原理,针对电子导向胶轮列车双端司机室驾驶的特点并结合道路商用车辆制动系统的方案提出了一种适用于电子导向胶轮列车的制动系统的方案。
关键词:胶轮列车;制动系统方案1.概述电子导向胶轮列车作为一种新型的交通工具在国内还处于起步发展的阶段,有两模块、三模块和四模块等多种的形式,特点是车辆有两个司机室,可实现双端驾驶。
电子导向胶轮列车制动系统方案是在商用车气压制动系统方案基础上结合双端驾驶的特点而提出的适应电子导向胶轮列车这种新车型的制动系统方案。
本文主要对三模块的车辆的制动系统的方案进行介绍。
1.列车基本情况简介列车由三节车组成,车与车之间通过铰接系统连接,列车编组放方式为:Mcp1+T+Mcp2,其中,+代表铰接系统;Mcp1,Mcp2分别为带司机室的车辆;T为不带司机室的中间车辆。
每节车配置两根车桥。
三模块列车的列车编组图如图1所示。
图1 列车编组图1.制动系统方案1.制动性能a) 在 AW2 工况下,在平直干燥路面情况下,制动初速度70km/h,从给制动指令到停车时,平均减速度为:1) 最大常用制动时不低于 2.0 m/s 2;2) 紧急制动时不低于 2.8 m/s 2。
b) 在 AW2 工况下,在平直干燥路面情况下,制动初速度 30km/h ,常用制动从给制动指令到停车,制动距离≤10.5 m。
3.2.系统组成电子导向胶轮列车的制动系统部分主要由供风系统、空气制动系统(含ABS系统)组成。
供风系统主要为列车空气制动系统、悬挂系统及其它辅助用风系统提供干燥、清洁的压缩空气。
空气制动系统主要实现列车的常用制动控制、驻车制动控制、紧急制动控制及ABS车轮防抱死控制。
3.2.1 供风系统供风系统包括风源模块、四回路保护阀和风缸。
主要为制动系统、空气悬挂等用风系统提供干燥、清洁的压缩空气。
列车配置两套风源模块为列车供风,当其中一套故障后,另外一套也能满足列车的用风需求。
DB4403∕T 6-2019 胶轮有轨电车系统技术规范
DB4403/T 6—2019目次前言 (II)1 范围 (1)2 规范性引用文件 (1)3 术语和定义 (2)4 行车组织与运营管理 (4)5 车辆 (5)6 限界 (9)7 线路 (10)8 道岔 (15)9 车站建筑 (17)10 车站结构 (20)11 导轨梁桥工程 (20)12 供电系统 (23)13 列车控制系统 (26)14 通信及其他系统 (29)15 综合调度及火灾自动报警系统 (31)16 机电设备 (33)17 综合车场 (35)18 防灾与救援 (37)19 环境保护 (38)附录A(规范性附录) 道岔 (39)附录B(资料性附录) 车辆限界图 (42)IDB4403/T 6—2019胶轮有轨电车系统技术规范1 范围本标准规定了胶轮有轨电车系统的行车与运营组织、车辆、限界、线路、道岔、车站建筑、车站结构、导轨梁桥工程、供电系统、列车控制系统、通信及其他系统、综合调度及火灾自动报警系统、机电设备、综合车场、防灾与救援和环境保护等相关内容。
本标准适用于小运量、专用路权,以高架为主,最高运行速度不宜超过80 km/h,高峰小时断面客运量不超过1万人次的胶轮有轨电车系统新建工程。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 3096 城市区域环境噪声标准GB 7588 电梯制造与安装安全规范GB 8702 电磁环境控制限值GB 8978 污水综合排放标准GB 9254 信息技术设备的无线电骚扰限值和测量方法GB 10071 城市区域环境振动测量方法GB/T 12325 电能质量供电电压允许偏差GB/T 14549 电能质量公用电网谐波GB 14892 城市轨道交通列车噪声限值和测量方法GB 16899 自动扶梯和自动人行道的制造与安装安全规范GB 17625.1 电磁兼容限值低压电气及电子设备发出的谐波电流发射限值GB/T 17626 电磁兼容试验和测量技术(所有部分)GB 20286 公共场所阻燃制品及组件燃烧性能要求和标识GB/T 21562 轨道交通可靠性、可用性、可维修性和安全性规范及示例GB/T 22239 信息安全技术信息系统安全等级保护基本要求GB/T 24338 轨道交通电磁兼容GB/T 28808 轨道交通通信、信号和处理系统信号和防护系统软件GB/T 28809 轨道交通通信、信号和处理系统信号用安全相关电子系统GB/T 31467 电动汽车用锂离子动力蓄电池包和系统GB/T 31485 电动汽车用动力蓄电池—安全要求及试验方法GB/T 31486 电动汽车用动力蓄电池电性能要求及试验方法GB/T 32590.1 轨道交通城市轨道交通运输管理和指令/控制系统第1部分:系统原理和基本概念GB 50007 建筑地基基础设计规范GB 50009 建筑结构荷载规范GB 50011 建筑抗震设计规范GB 50016 建筑设计防火规范GB 50034 建筑照明设计标准1DB4403/T 6—20192 GB 50045 高层民用建筑设计防火规范GB 50053 20kV及以下变电所设计规范GB 50054 低压配电设计规范GB 50057 建筑物防雷设计规范GB 50059 35~110kV变电所设计规范GB/T 50062 电力装置的继电保护和自动装置设计规范GB/T 50065 交流电气装置的接地设计规范GB 50067 汽车库、修车库、停车场设计防火规范GB 50116 火灾自动报警系统设计规范GB 50139 内河通航标准GB 50156 汽车加油加气站设计与施工规范GB 50157 地铁设计规范GB 50217 电力工程电缆设计规范GB 50458 跨座式单轨交通设计规范GB 50763 无障碍设计规范GB 50974 消防给水及消火栓系统技术规范GB 51151 城市轨道交通共公安全防范系统工程技术规范GB 51249 建筑钢结构防火技术规范GB 51251 建筑防烟排烟系统技术标准CJJ 11 城市桥梁设计规范CJJ 152 城市道路交叉口设计规程CJJ 166 城市桥梁抗震设计规范CJJ/T 235 城镇桥梁钢结构防腐蚀涂装工程技术规程CJJ 377 城市道路工程设计规范CJ/T 417 低地板有轨电车车辆通用技术条件HJ 453 环境影响评价技术导则城市轨道交通JGJ 16 民用建筑电气设计规范JT/T 722 公路桥梁钢结构防腐涂装技术条件JT/T 933 快速公共汽车交通系统(BRT)站台安全门JTG D60 公路桥涵设计通用规范JTG/T D60 公路桥梁抗风设计规范JTG/T B02-01 公路桥梁抗震设计细则JTG/T B07 公路工程混凝土结构防腐蚀技术规程JTG D63 公路桥涵地基与基础设计规范JTG D64 公路钢结构桥梁设计规范TB 10002 铁路桥涵设计规范TB 10063 铁路工程设计防火规范TB/T 2615 铁道信号故障——安全原则TB/T 3138 机车列车阻燃材料技术条件3 术语和定义下列术语和定义适用于本标准。
跨座式单轨车辆制动系统与制动模式

引言重庆跨座式单轨交通已开通十多年,作为网红景点吸引着许多乘客去体验,也因其独特优势引起许多城市的关注。
跨座式单轨交通相较于地铁交通具有环保性能优良、成本低、施工周期短、地形适应性强等优点,是解决城市交通拥堵、构建城市交通多样化的一种交通型式。
跨座式单轨车辆应用橡胶充气轮胎,轨道梁采用混凝土,相较于传统钢轮钢轨有较大的摩擦系数。
制动系统设计有电制动和空气制动,其中电制动优先级最高;其次为空气制动,制动介质选用安全无污染的空气,具有模块化、环保、性能可靠等优点,可以保障车辆的安全运行。
1 概述样车的车辆编组为-Tc1+Mc2-,其中:Tc表示带司机室的拖车;Mc表示带司机室的动车; -表示密接式半自动车钩;+表示中间车钩。
可以根据客户要求进行扩编。
参考CJ/T 287-2008《跨座式单轨交通车辆通用技术条件》标准,对车辆在任一载荷下,在平直干燥轨道上,车辆速度从80km/h减速至0km/h制动性能提出如下要求:常用制动平均减速度≥1.1m/s2;紧急制动平均减速度≥1.25m/s2;快速制动平均减速度≥1.25m/s2。
根据减速度要求以及各载荷状态下的轴重分布、黏着需求、安全原则确定制动模式配置方案,如附表所示。
2 制动系统组成样车制动采用车控模式,系统由一个动车,一个拖车共两套配置。
系统包含:供风装置(拖车)、制动控制装置、基础制动装置、空气悬挂装置等。
2.1 供风装置供风装置安装在Tc1车下,它主要由空气压缩机(01空气过滤器组件、02空压机主机组件、03安全阀、04压缩空气冷却器组件、05温度开关)、单向阀、双塔式干燥器(01消音器、02压力跨座式单轨车辆制动系统与制动模式张彦烨 谢耀征(通号轨道车辆有限公司,长沙 410217)摘 要:本文介绍了跨座式单轨车辆制动系统的组成、配置方案和整车制动工况,并对各制动模式及其触发条件进行了阐述。
关键词:跨座式单轨车辆;制动系统;制动模式中图分类号:U270.35 文献标志码:ABraking system and braking modes of straddled monorail vehicleZhang Yanye Xie Yaozheng(CRSC Railway Vehicles Co., Ltd., Changsha 410217)Abstract: This paper introduces the composition, configuration and braking conditions of the straddled monorail vehicle braking system, and describes each braking mode and its triggering conditions.Key words: straddled monorail vehicle; brake system; brake mode传感器、03组合阀、04/05电磁阀、06/07干燥塔、08/09单向阀)、最小压力维持阀、测试接口、安全阀等组成,如图1所示。
胶轮列车及其制动控制系统、方法[发明专利]
![胶轮列车及其制动控制系统、方法[发明专利]](https://img.taocdn.com/s3/m/a9eb798e25c52cc58ad6be7b.png)
专利名称:胶轮列车及其制动控制系统、方法专利类型:发明专利
发明人:刘云峰,宗清泽,吴旦鸣,高健飞,崔周森申请号:CN202011403494.X
申请日:20201204
公开号:CN112550251A
公开日:
20210326
专利内容由知识产权出版社提供
摘要:本申请实施例提供一种胶轮列车及其制动控制系统、方法,涉及胶轮列车制动技术。
所述胶轮列车的制动控制系统,用于拖车转向架,包括:多个液压制动控制单元,用于分别设置于多个车厢,所述液压制动控制单元用于连接拖车转向架的、与所述液压制动控制单元同车厢的车轴所对应的制动缸;所述液压制动控制单元用于获取所述胶轮列车的制动指令,根据所述制动指令确定相应拖车转向架的制动缸的目标液压油压力,根据所述目标液压油压力控制相应制动缸施加制动。
本申请实施例中,对于连接于相邻两车厢的拖车转向架来说,不用跨车设置油路,降低了液压油路的布设难度,降低了液压油路的故障率,例如降低了液压油路漏油的概率,利于降低后续的维修成本。
申请人:中车南京浦镇车辆有限公司
地址:210018 江苏省南京市江北新区泰山园区浦珠北路68号
国籍:CN
代理机构:北京新知远方知识产权代理事务所(普通合伙)
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1绪论
单轨胶轮车辆,是一种与其它车辆共享路权的城市公交车。
单轨胶轮车辆具有载客量大、爬坡能力强等特点。
BECU(制动电子控制单元)的设计是单轨脚轮客车的核心技术之一。
单轨胶轮客车制动系统采用电气配合形式的制动制动系统。
在单轨胶轮车辆的制动系统中,BECU起到对客车的制动力计算和分配的作用。
作为整个客车制动系统的核心部件,其在整个制动系统中的位置如图1所示。
如图1所示,BECU首先采集脚制动阀信息,然后结合车速、车重等信息计算出整车的制动力,最后将制动力分配给制动执行模块同时向牵引控制系统告知当前的制动等级。
为使制动系统的控制能够准确,本系统采用以加速度为导向的闭环控制策略。
2系统设计要求
单轨胶轮车辆制动系统应满足以下要求:
①再生制动:在制动过程中优先使用电制动,在电制动不足的情况需要气制动补充;
②空气制动:BECU通过控制比例继动阀的输出气压,来控制制动缸的空气压力;
③无极制动:制动级位采用脚踏板的无极形式触发,BECU要能够准确捕捉制动等级;
④闭环控制:为保证制动力准确实施,系统采用闭环控制进行制动控制。
BECU的制动控制过程如下:
①通过踏板角度传感器、轮速传感器、倾斜传感器分别采集踏板角度、当前减速度、当前坡度;
②通过踏板角度、当前减速度、当前坡度结合当前所
单轨胶轮车辆减速度闭环控制的制动力分配技术
陈亮;韩继生
(南京中车浦镇海泰制动设备有限公司,南京211800)
摘要:单轨胶轮车辆,是一种新型的城市交通工具。
当前,在全球已有部分城市开始使用此类车辆。
国内,目前有上海张江和天津滨海已经运营该类车辆。
对其制动系统的研究有着深远的意义。
由于这类车辆与其它车辆共享路权,对制动的精准性要求更高。
所以,对该车的制动控制策略采用一种基于减速度的闭环控制。
通过这种闭环控制,可以有效地达到目标减速度值。
关键词:单轨胶轮车辆;制动系统;减速度闭环控制
3.3典型应用
3D扫描技术是逆向工程的重要分支,即通过扫描实物的3D结构特征来构建标准比例的仿真模型,在3D打印和扫描技术中,长期使用CAD软件对模具制造和检测进行规划建模,但在逆向工程打磨加工过程中,由于对象材料的特性使得传统加工工艺在3D打印过程中难以实现高精度还原,传统的数控多轴加工模式的伺服轴行程也难以满足加工标准,而电火花高速加工技术的6轴以上一体化加工技术可有效降低定位误差,缩短生产加工链条,实现高效管理,只需一次装夹就能完成器件定位和扫描,在3D打印过程中可对数控小孔进行穿孔加工,6轴和7轴的数控系统可实现对复杂空间曲面的深层加工,使3D 打印和3D扫描能够在成型铣削加工中得到高度还原,高速电火花的熔断效果也能降低激光打磨造成的孔口边缘毛刺和粗糙问题,是3D逆向工程技术得到发展。
最后,多轴数控电火花高速小孔加工技术不仅在民用领域有广泛应用,由于其对空间结构的精密定位和深加工能力,使其在航空航天和军工领域都可以有所延伸,例如,航空发动机被誉为人类工业皇冠上的明珠,我国在这方面长期受到西方国家的制裁和封锁,技术突破乏善可陈,即便投入了大量人力物力也始终与美俄有着数十年差距,然而多轴数控电火花高速小孔加工技术为涡扇发动机的核心机叶片制造提供了技术支撑,在WS10B、WS15太行发动机上都得到广泛应用,缩短了我国与西方国家的差距。
4结论
多轴数控电火花高速小孔加工技术在加工领域具有高效高质的优点,可以显著缩短加工周期,降低复杂元器件的处理难度,且加工精度要远超传统加工工艺,在3D 扫描数控多轴加工方面具有良好的发展前景,甚至在军工和航天领域都得到深度应用。
望本文研究内容得到相关机构的重视,加强多轴数控加工技术的创新和理论研究,为推动我国加工业发展积攒经验,为实现制造业现代化提供建设性意见。
参考文献:
[1]朱宁,叶军,王文浩.多轴数控电火花高速小孔加工技术[J].航空精密制造技术,2016,52(3):1-4.
[2]翟力军,伏金娟,刘建勇,等.电火花成形加工技术的现状与挑战[J].金属加工(冷加工)冷加工,2016,28(21):10054-10056.
[3]潘景洪.车胎模具制造数控加工技术的应用[J].橡塑技术与装备,2016,19(11):25-29.
[4]赵亚州.电火花线切割数控回转台的设计及应用技术研究
[D].佳木斯:佳木斯大学,2016.
[5]奚学程,陈昊,陈默,等.RTAI实时操作系统在多轴联动电火花加工数控系统中的应用[J].电加工与模具,2016,27(4):64-
67.图1单轨胶轮车辆制动系统
Internal Combustion Engine &Parts
在的制动行程设置的最大冲击,计算目标减速度;
③TCU (牵引控制单元)通过CAN 网络传输当前可以提供的电制动力,同时空气弹簧通过网络将车重信号传送给BECU 。
BECU 根据上述条件计算出TCU 可提供的再生制动的减速度。
同时计算出TCU 申请等级;
④BECU 根据目标减速度和再生制动的减速度计算出当前所需补充的总气压,然后根据轴分配情况将气压分配到每根轴上;
⑤根据轴的分配情况,BECU 控制每一根轴上的EP (电比例继动阀)电流该控制进行闭环控制EP 的输出气压。
3系统设计
为了设计能够流程化以及易于验证,单轨胶轮车辆采用自顶向下的模块化设计。
3.1再生制动
BECU 通过评估当前的目标减速度和当前车辆已经达到的减速度,计算出当前所需的执行的制动力。
BECU 计算出实际要执行的制动力以后,结合当前车速、车重以及当前TCU (牵引控制单元)反馈的相关信息后,计算出合适的TCU 等级。
如图2所示,BECU 通过踏板计算出目标减速度,TCU 反馈处理模块得到当前TCU 可以提供的电减速度。
TCU 等级处理模块结合以上信号再参考当前已经执行的减速度,计算出当前可以申请的电减速度。
通过该减速度BECU 等级处理模块最终换算成TCU 等级。
该等级信号通过CPU 的外围电路,通过开关量发送给TCU 。
3.2空气制动电制动有效时,优先进行电制动。
当电制动不能满足制动力需求时,空气制动进行补充,以实现车辆制动的目标。
电制动失效时,本车辆的制动由空气制动完全接管。
控制过程如下:
①制动踏板踩下后,BECU 根据踏板百分比和车重信息计算出本次制动所需的总制动力;
②BECU 根据总制动力进行电制动申请,TCU 根据电制动申请等级提供电制动;
③BECU 得到当前能够提供的最大电制动力,通过总制动力和电制动力分别计算出总减速度和电减速度,并将其进行比较。
如果电减速度大于等于总减速度,表明电制动力满足本次制动的需求,不需要补充空气;如果电减速度小于总减速度,表明电制动力不能满足本次制动需求,需要补充空气,补充空气产生的气减速度为总减速度与电减速度之差;
④EP 阀开始补充空气后,BECU 会检测所有EP 阀是否正常。
如果正常,BECU 将本次所需的空气平均分配至各车轴;否者BECU 将不给异常EP 阀分配空气,本次所需的空气平均分配至各正常车轴;
⑤确定每根车重需要补充的总气压后,如果本次踏板处于第二行程中,空气会通过脚踏阀进入EP 阀,BECU 将减去此部分的压力气压,得到BECU 控制EP 阀执行的气压。
3.3闭环控制
如图3所示司机踩上踏板,形成最初的踏板目标减速度。
此时的减速度是渴望施加的减速度,但是实际执行的减速度并不是执行这么大的减速度。
实际执行的减速度要参考当前车轮已经执行了多少减速度。
该减速度通过速度传感器获得。
由实际执行的减速度来修正踏板目标减速度,得到本次制动要施加的目标减速度。
由这个最终的目标减速度形成TCU 的电制动等级和空气制动力。
4结论
由于单轨胶轮车辆与其它车辆共享路权,对制动的精准性要求更高。
采取精度高的减速度闭环控制,可以很好地达到目标减速度。
当前,样车正在调试阶段。
从目前运行的结果来看制动效果较好,减速度按照预期的结果执行。
参考文献:
[1]Jiang,F.and Gao,Z.(2001),An application of nonlinear PID control to a class of truck ABS problems,in ‘Proceedings of the 40th IEEE Conference on Decision and Control,Orlando,Florida,USA ’,Vol.1,pp.516-521.
[2]Johansen,T.,Kalkkuhl,J.,Ludemann,J.and Petersen,I.(2001),Hybrid control strategies in ABS,in ‘Proceedings of the American Control Conference,Virginia,USA ’,
Vol.
2,pp.1704-1705.
图3减速度闭环控制过程
图2TCU 等级处理过程。