基于TMS320F28335和增量式编码器的测速方法设计
基于TMS320F28335的无刷直流电机控制器设计

且 超调 量较 小 ,稳定 ห้องสมุดไป่ตู้较 好 ,证 明了 控制 器设 计 的正 确性和 合理 性 。 关键 词 :T MS 3 2 0 F 2 8 3 3 5;无 刷直 流 电机 ;P l D;控 制器
wa t c h . Mo r e o v e r , t h r o u g h wa t c h i n g a n d a n a l y z i n g t h e d i f e r e n c e s o f s p e e d v a r i a t i o n s a b o u t c l o s e d — l o o p c o n t r o l s y s t e m, we c a n k n o w t h a t t h e B L D C M c on t r o l l e r b a s e d o n d o u b l e c l o s e d l o o p c o n t r o l wh i c h wa s d e s i g n e d i n t h i s p a p e r c o u l d wo r k n o r ma l l y , a n d c o mp a r e d wi t h t h e o p e n l o o p c o n t r o l B L D CM c o n t r o l l e r i n t h e ma r k e t , t h e c on t r o l s y s t e m h a s t h e a d v a n t a g e s o f s ma l l o v e r s h o o t , g o o d s t a b i l i t y a n d f a s t r e s p o n s e wh i c h t o o k l e s s t h a n i s f r o m o r i g i n a l s p e e d t o t h e g i v e n r o t a t i n g s p e e d . T h a t p r o v e s t h e c o r r e c t n e s s a n d r a t i on a l i t y o f t h e c o n t r o l l e r d e s i g n . K e y wo r d s : T MS 3 2 0 F 2 8 3 3 5 : B r u s h l e s s D C mo t o r ; P I D : C o n t r o l l e r
基于DSP28335的永磁同步电机调速系统设计

2011-2012德州仪器C2000及MCU创新设计大赛项目报告题目:基于DSP28335的永磁同步电机调速系统设计组别:专业组应用类别:先进控制类平台:C2000题目:基于DSP28335的永磁同步电机调速系统设计摘要(中英文)本控制系统的设计是为了实现基于TMS320F28335的永磁同步电动机的调速系统,并把它引用到全电动注塑机当中。
本系统使用SVPWM的控制方法,通过采样电机电流和旋转变压器的位置信息,实现速度、电流双闭环控制。
通过TMS320F28335的硬件浮点处理核心,实现应用于永磁同步电机的浮点算法,去取代过去的定点算法,提高代码效率。
Abstract: The control system is designed to realize TMS320F28335 based on the permanent magnet synchronous motor speed control system, and put it to quoting all electric of injection molding machine. The system of the control method used SVPWM, through the sampling motor current and rotating transformer position information, realize speed, current double closed loop control. Through theTMS320F28335 hardware floating-point processing core, realize the application for permanent magnet synchronous motor in the floating point arithmetic, to replace the past fixed-point algorithm, and improve the efficiency of the code.1.引言1.1 设计背景及目的本永磁同步电机调速系统是全电动注塑机的其中一个应用部分。
基于TMS320F28335的伺服系统数字化速度环设计

基于TMS320F28335的伺服系统数字化速度环设计作者:马蓓丽杨国文来源:《科技创新与应用》2017年第16期摘要:针对传统伺服系统模拟速度环难以实现高精度高性能的控制要求,文章设计并阐述了数字化速度环系统的结构原理与硬件实现。
系统采用LTC1821芯片为数模转换(D/A)器件,以DSP芯片TMS320F28335为核心控制器,选用光纤陀螺仪作为速度反馈装置,搭建高精度速度环伺服跟踪平台。
仿真实验证明,通过DSP软件设计与调试,运用增量式比例积分(PI)调节算法,该系统具有响应速度快,低超调和闭环精度高等优点。
关键词:伺服系统;速度环;D/A转换;PI算法引言作为伺服控制系统非常重要的组成部分,速度环要求具有高精度、快响应、强抗干扰性等良好的控制性能,以实现伺服系统快速准确的定位与跟踪。
对于速度环伺服系统设计,其转速控制要求有两个方面:在给定的最高转速和最低转速的范围内,实现不同转速的调节;以一定的精度在所需转速上稳定运行,在各种可能的干扰下不允许有过大的转速波动[1]。
为实现高精度的数字化速度环设计,本文提出使用16位D/A转换芯片LTC1821为核心的速度环伺服跟踪系统,该芯片实现高精度数字量到模拟量的输出功能,具有高精度、低噪声、快速建立电压输出及强抗干扰特性,可完成控制需求;同时搭配使用数字信号处理器TMS320F28335为控制器[2],软件设计控制LTC1821,以实现系统高精度数字化功能。
1 伺服速度环系统框架该系统硬件可分为DSP控制模块、D/A转换模块、驱动控制模块、通信接口模块和电源模块等组成。
其结构框图[3]如图1所示:本系统首先利用光纤陀螺仪作为速度反馈装置,DSP芯片内置的SCI模块可采集陀螺信号,提供转台的角度反馈数据,同时进行DSP软件算法搭建速度环PI控制器,实现系统的高精度速度闭环[4];其次D/A转换模块将DSP运算形成的数字信号控制量转换成模拟信号输出至驱动模块,实现电机的转速控制;最后为实现DSP芯片与外部设备的数据传输,通过通信接口模块实现通讯,DSP可接收给定速度命令,同时将当前实时速度值及各种故障状态回传,实现对整个系统的控制监控。
基于TMS320F28335无刷直流电动机换向调速系统设计

基于TMS320F28335无刷直流电动机换向调速系统设计北京信息科技大学的研究人员李萍、刘国忠,在2015年第7期《电气技术》杂志上撰文,无刷直流电动机具有高效、节能、寿命长等显著特点而广泛应用于国民经济发展的各个领域,研究其换向调速控制技术对提高系统性能具有重要意义。
针对传统无刷直流电动机控制精度较低、响应速度较慢的问题,设计了基于TMS320F28335浮点型高性能DSP控制器的无刷直流电机双闭环PID调速系统,包括换向功率驱动硬件电路系统和信息处理及PWM控制调速软件系统。
通过试验调试,表明所设计系统实现电机换向调速功能,系统运行平稳,具有良好的动态、静态特性。
1 引言无刷直流电动机由于其结构简单、出力大、效率高、寿命长、噪声低等特点,已在国防、航空航天、机器人、工业过程控制、汽车电子、精密机床、家用电器等领域得到广泛应用。
目前,对于无刷直流电机的控制主要采用专用集成电路控制器[1、2]。
专用集成电路控制器结构简单、性价比高、外围器件比分离式控制器少,但在应用中会受到功能扩展性差,不易进行产品功能变化和升级操作等方面的制约,而更多地转向能够灵活自主设计系统软、硬件方面,常采用FPGA、单片机实现对电机的控制。
随着DSP的广泛应用,其在数据处理速度和强大的外设处理能力方面,逐步成为电机控制领域的首选。
本文介绍以DSP TMS320F28335控制器为核心,设计无刷直流电机调速系统包括硬件电路和控制软件。
2 无刷直流电动机调速原理常用的无刷直流电动机是由电机本体、具有电子换向功能的功率驱动电路和位置传感器三部分组成。
将电机设计成由铁芯中嵌有三相对称Y型接法的定子绕组和由一定极对数镶嵌于铁芯永磁体的转子构成电机本体。
由于无刷直流电机取消了电刷,安装在转子上的传感器检测转子转动位置,控制与电机定子绕组连接的换向功率驱动电路,确保定子电流导通相所产生的电枢磁场与转子永磁体的磁场方向在电机运行过程中始终保持互相垂直,从而获得最大转矩,驱动电机运转[3]。
基于TMS320F28335的新型数字电机驱动器的设计与分析
机床与液压
MACHI NE T 0OL & HYDRAULI CS
De c . 2 01 3 Vo 1 . 41 No . 2 3
D OI :1 0 . 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 2 3 . 0 2 4
基于 T M S 3 2 0 F 2 8 3 3 5的新 型 数字 电机驱 动 器 的设 计 与 分析
陈 明方 ,邹 平 ( 1 .东北大学机械 工程与 自 动化 学院,辽宁沈阳 1 1 0 8 1 9 ;
2 .沈 阳职 业技 术 学 院 电气工程 系,辽 宁沈 阳 1 1 0 0 4 5 )
2. De p a tme r n t o f El e c t r i c a l En g i n e e r i n g, S h e n y a n g Vo c a t i o n a l a n d Te c h ni c a l Co l l e g e,
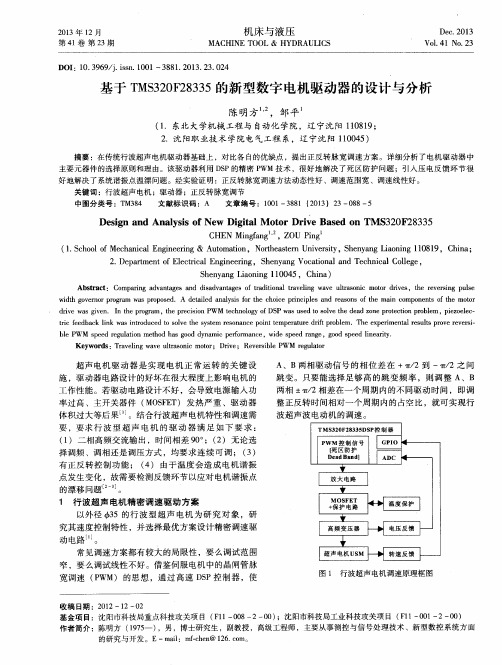
摘要 :在传统行波超声 电机驱动器基础上 ,对 比各 自的优缺点 ,提 出正反转脉 宽调速方 案。详细分析 了 电机驱 动器 中 主要元器件 的选择原则和理 由。该驱动器利用 D S P的精密 P WM 技术 ,很好 地解决 了死 区防护 问题 ;引入压 电反馈环 节很 好地解决 了系统谐振点温漂 问题 。经实验证 明 :正反转脉 宽调 速方 法动态性好 、调速范围宽 、调速线性好 。
wi d t h g o v e r n o r p r o g r a m w a s p r o p o s e d .A d e t a i l e d a n ly a s i s f o r t h e c h o i c e p in r c i p l e s a n d r e a s o n s o f t h e ma i n c o mp o n e n t s o f t h e mo t o r
基于TMS320F28335的电机控制系统设计

基于TMS320F28335的电机控制系统设计电机控制系统在现代工业中起着举足轻重的作用,它被广泛应用于机器人、自动化生产线、电力传输等领域。
随着科技的发展,数字控制系统已经逐渐取代了传统的模拟控制系统,成为了电机控制系统中的主流。
在数字控制系统中,单片机芯片作为控制核心,成为了实现电机控制的重要工具。
本文将基于TMS320F28335单片机芯片,介绍电机控制系统的设计过程。
一、单片机选型在电机控制系统中,单片机芯片作为控制核心至关重要。
因此,单片机的选型是设计过程中最为关键的一步。
TMS320F28335作为一款高性能的DSP芯片,在数字控制系统中广泛应用。
TMS320F28335内置了多个PWM模块、模拟转换器、CAN总线等外设,可以支持多种电机的控制。
二、硬件设计电机控制系统的硬件设计包括电机驱动器、控制板、驱动模块等。
其中,电机驱动器通常使用功率半导体器件,如IGBT、MOSFET等。
控制板上包括单片机、PWM模块、模拟转换器等。
驱动模块是将单片机产生的PWM信号转换成可以驱动电机的电平信号的模块。
根据具体的控制要求,还可以加入如编码器、位置传感器等反馈元件。
三、软件设计电机控制系统的软件设计主要包括控制算法、PID参数的调试以及驱动程序的编写。
控制算法需要根据电机的类型和控制要求进行设计,常见的有矢量控制、FOC控制、直接转矩控制等。
PID 参数的调试是优化控制算法的一个重要步骤,需要根据实际情况进行逐步调整。
驱动程序的编写主要是将控制算法转化为可以在单片机上运行的程序。
四、调试实验在完成软硬件设计之后,需要进行实验调试。
首先进行板级调试,检验电路是否正常。
然后进行控制算法的调试,测试控制效果以及PID参数的设置合理性。
最后进行整个系统的调试。
在实验过程中,还需要注意电机的安全操作。
五、应用场景基于TMS320F28335的电机控制系统可以应用于多种不同类型的电机控制,如直流电机、交流电机、步进电机等。
基于TMS320F28335语音信号端点检测的硬件与软件设计
Telecom Power Technology研制开发语音信号端点检测的硬件与软件设计季卫松(南京莱斯信息技术股份有限公司,江苏语音信号的端点检测是实现电话与无线电台无缝连接的关键技术。
这种技术广泛应用于空管通信的语音调度、海岸电台通信的语音调度以及应急通信的语音调度。
因此,设计了语音信号端点检测的硬件与软件,实现了语音信号端点转换;语音调度;软件算法Hardware and Software Design of Endpoint Detection of Voice Signal Based on TMS320F28335JI Wei-songNanjing Les Information Technology Co.,Ltd.,The endpoint detection of voice signal is the key technology to realize seamless connection between telephone and radio station. This technology is widely used in voice scheduling of air traffic control communicationof coastal radio station communication and voice scheduling of emergency communication. In this papersoftware of endpoint detection of voice signal are designed,and the automatic endpoint detection of voice signal is realized.迭代;}超过20个,断定语音到来。
}(上接第53页)。
基于TMS320F28335的信号处理电路设计
基于 TMS320F28335的信号处理电路设计摘要:鉴于TMS320F206即将停产,需要寻求一款DSP对其进行替代,替换DSP后的信号处理电路需完成温度值、一路电气零位、三路加表惯性量、三路陀螺惯性量的采集以及惯性量的补偿计算和数据组帧发送的功能。
该信号处理电路基于浮点DSP TMS320F28335,该DSP的引用简化了惯性测量装置中的误差补偿计算,为单位类似的产品提供了一套可行方案。
TMS320F28335丰富的外设使得信号处理电路具有可再简化的潜力,其在惯性测量装置信号处理电路中的应用具有广阔前景。
通过系统试验,验证了系统软硬件设计的正确性高的应用推广价值。
关键词:DSP;信号处理电路;浮点1、前言现有技术方案主要为TMS320F206+异步串口SC28L202的方案,电路上电后完成外围电路的初始化,TMS320F206通过SC28L202相应的I/O完成AD7716的配置,AD7716初始化完成后每隔一个固定时间自动完成加表数据的采集并输出一个中断信号,所采数据存于FIFO中。
陀螺每隔一个固定时间将一帧数据存于SC28L202的FIFO中,当TMS320F206判到第四个AD7716中断来到后从相应的FIFO中取加表、陀螺数据,TMS320F206完成加表、陀螺数据温度补偿计算后组帧并向相应的接口发送数据。
本文以某信号处理电路设计为背景,为了解决TMS320F206即将停产的问题,电路架构由TMS320F206+异步串口SC28L202的方案升级为TMS320F28335+异步串口TL16C752CIPFB架构。
其中DSP为TI公司的TMS320F28335 [1],异步串口为TI公司的TL16C752CIPFB [2]。
2、某信号处理电路原理TMS320F206+异步串口SC28L202架构设计信号处理电路采用了TMS320F206+异步串口SC28L202架构。
信号处理电路主要由加速度计信号采集电路、陀螺信号采集电路、测温电路、数字信号处理及控制电路、外设输出接口电路组成。
基于TMS320F28335的伺服系统数字化速度环设计
度、 快 速建立 的 电压输 出型数字 模拟 转换 器 L T C 1 8 2 1 。L T C 1 8 2 1 有两 种工作模 式 ,单极 性输 出模 式 0 V至 I O V或 者 0 V至一 1 0 V, 和 双极性 输 出模 式一 1 0 V至 1 0 V; 高 精 度特性 , 在 整 个 工 业 温 度 范围内, 其 积分 非线 性 和微分 非 线性不 超 过 1 L S B; 具 有 超 快 速 建 立 性 能 ,在 满 度 输 出 范 围为 1 0 V时 , L T C 1 8 2 1 输 出达 到 1 L S B 的时间小 于 2 u s ; 具有 异步输入 清零功 能 , 引脚 异步输 入 C L R 置 低 电平时 , L T C 1 8 2 1 输 出复位到零_ 5 _ 。 其 外 部 连 接 电路 应 用 如 图 2
图 1 速 度 环 结 构 框 图
本 系统 首先 利用 光纤 陀螺 仪作 为速度 反馈 装 置 , D S P芯 片 内置 的 S C I 模块 可采集陀螺 信号 , 提供 转 台的角度反馈 数据 , 同 时进行 D S P软件算 法搭建 速度环 P I 控制器 , 实现系统 的高精度 速 度 闭 环 ; 其次 D / A转 换 模 块 将 D S P运 算 形 成 的 数 字 信 号 控 制 量转换成 模拟信号输 出至驱 动模块 , 实 现 电机 的 转 速 控 制 ; 最 后 为实现 D S P芯 片 与外 部 设 备 的 数 据 传 输 ,通 过 通 信 接 口模 块 实现通 讯 , D S P可 接收 给定 速度命 令 , 同时将 当前实 时速度 值及 图3 T MS 3 2 0 F 2 8 3 3 5与 L T C 1 8 2 1连接 简 图 各 种 故 障 状 态 回传 , 实 现对整个系 统的控制监控 。 2 硬件设计 2 . 2 . 1 L T C 1 8 2 1 时 序 控 制 L T C 1 8 2 1 是 具有 配 备输入 寄存 器 和 D A C寄存 器两个 1 6位 2 . 1 D / A 转 换 模 块 当 引 脚 拉 到低 电 平 时 , 输 入 数 据 加 载 D A C芯 片 选 用 凌 特 公 司 生 产 的 1 6位 并 行 数 字 接 口 、 高 精 寄 存 器 的 双 缓 冲结 构 。 到L T C 1 8 2 1的输入 寄存 器 ;当 引脚 L D拉 到 高 电平 时 , D A C寄 存 器 被 更 新 ,进 而 D A C输 出数据被更新 。本文 中 , 将 引脚 WR 与 L D短 接, 直接与 7 4 L V1 3 8的 译 码 信 号 输 出 端 , 作 为 控制 L T C 1 8 2 1的时序 控制端 口。在控 制信号 输 出 的 下 降 沿 ,输 人 数 据 被 写 入 L T C 1 8 2 1的 输 入 寄 存 器 ,在 上 升 沿 D A C寄 存 器 被 更 新 。 引 脚 低 电平 时 , L T C 1 8 2 1 复位到 0 V输 出
基于TMS320F28335的伺服驱动器的设计
基于TMS320F28335的伺服驱动器的设计【摘要】本文设计了一种基于DSP的交流伺服电机驱动器的组成和总体设计方案。
该驱动器采用TMS320F28335为核心控制电路,设计完成了驱动电路和人机交互界面电路,同时完成了软件程序设计。
【关键词】DSP;伺服驱动器;TMS320F28335引言伺服驱动系统是机电一体化技术的重要组成部分,随着现代工业的快速发展,交流伺服系统逐渐成为工业伺服系统的主流,在数控机床、工业控制等自动化装备中得到广泛的应用。
本文介绍了一种基于TMS320F28335的伺服驱动器设计方案。
TMS320F28335是TI公司设计的一款数字信号处理器,其主要面向工业控制领域,特别适用于电机控制、运动控制等应用。
1.伺服驱动器结构及原理伺服驱动器主要由DSP(TMS320F28335)、主电路、驱动模块、检测模块、通信模块和人机接口模块等部分组成,如图1所示。
图1 伺服驱动器原理框图伺服驱动器通过光电编码器和电流传感器将电机的转速,方向和电流信号送给DSP处理器,将给定的信号与采集的信号进行比较,经过PID控制算法后输出SPWM波形,使电机达到所设定值。
2.硬件系统设计2.1 DSP控制器TMS320F28335芯片主频150MHz,具有32位浮点运算能力,6个DMA通道,支持ADC,McBSP,ePWM,XINTF 和SARAM,片内有256K×16大小的FLASH程序存储器和34K×16大小的SARAM,具有18路的PWM输出,采用1.8V内核电压,3.3V外围接口电压供电。
2.2 主电路及驱动电路2.2.1 电源模块TMS320F28335工作电源为 3.3V和 1.9V/1.8V。
所以采用了TI公司的TPS767D318芯片给DSP供电。
该芯片是TI公司专为DSP供电所设计,输入电压为5V,能同时产生3.3V和1.8V两种电压,而且该芯片自带电源监控和复位功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
速度计算公式为 :
‘ )
改进 的 T法 分区测速 策略 。
3. 1高速 区域测速 高 速区域 的测 速原理如 图 2所示 。随着转 速的升 高 ,编 码 器的两个 相邻输 脉冲间 隔时间对应 的高频 时钟 脉 冲数 量 m. 减少 ,造成测 速的绝对误 差和相对误 差都增大 。如果根 据 不同的转速 ,检 测编码器 k . 个连续输 } } j 脉 冲间隔时间 对应的 高频时钟脉 冲数量 : ,这样 就可 以减小 由于高频时钟 脉冲数 量 少引起的检测 误差 , 从而提高 T法在高速区域的测速精度 ,
T法 的优 点 ,拓 宽 了测 速 范 围 ,但 在 低 速 区域 测 速 延 时 过 长 ; 变 M/ T法 是 在 M/ ] r 法 基 础 上 的改 进 , 采 用 了 动 态 的检 测 时 间 ,
2传 统的 T 法测 速原理 及 误差分 析
传统 的 T法测速原理 如图 l 所示 。编码 器的线数 为 N, 在编 码器 的两个相邻输 出脉 冲间隔时间 内 ,计 取 已知 周期 为 的高频 时钟脉 冲数量 m ,并 以此来计算转速 。
大连 交通大学 丁志勇
摘 要 :针 对 交流 电机调速 系统 中的速度采 集精 度 问题 ,提 出了一种基 于 T MS 3 2 0 F 2 8 3 3 5 和增量式编码 器的 电机转速测量方法。在 分析传统 的 T法测速 原理基础上 ,提 出了改进的 T法分区测速 方法,该方法在 保证较
小测速延 时的 同时,能够在宽转速范 围内保持较 高的测速精度。设计 了基于 T MS 3 2 0 F 2 8 3 3 5的改进 T法分 区
测速方案 ,并进行 实验验证 ,实验结果表 明,所提 的测速方案在 宽转速 范围 内均有较好的测速 性能。 关键字 :改进 T法 ;T MS 3 2 0 F 2 8 3 3 5 ;增量式编码 器 ;转速测量
1引言
在高性能 的交流 电机调 速系统 中 ,电机转速 的检测 至关 重 要 ,其 快速性 和精确性 直接影 响到系统 的动静 态性 能 …。 增 量式 编码 器由于测速精度高 、 成本低 、 接 口电路简单等优点 , 广泛应 用于 电机 控制领 域 【 2 ] 。基 于增量式 编码 器的测速方 法 有 M 法 、T法 、M/ ] r 法 、变 M/ T法 口 】 。一 般情 况下 ,M 法适 用 于高速 区域 ;T法适用 于低 速区域 ;M/ T法 结合 了 M 法和
频 时钟 脉冲数量 m 比较 大 ,并且 m, 越大 ,测速 的绝 对误 差
4 2 l 智 能 机 器 人
NT E L LG E N T R o B0 T
《 智能机器人 》D e c e mb e r . 2 0 1 7
和相对 误差就 会越小 ,测 速精度越 高 :由于高频时钟 脉冲计 数器存在上界 , 所 以检测 的转速不能无 限低 。 随着转速 的升高 , 编码器 的两个 相邻输 出脉 冲间隔 时间对应 的高频时钟 脉冲数
4测速 方 案设 计
在 交 流 电机 凋速 统 中,通 过 T MS 3 2 0 F 2 8 3 3 5的 增 强 型
正 交 编码 脉 冲模 块 ,可 以获得 电 机 的位置 、方 向和 转速 信 息 J 。每个增 强型正 交编码脉 冲模 块包含一 个正交捕 获单 元
得较 高测速精 度的原 因出发 ,提 出了在测速 过程 中动态改变 编码器 脉冲计数 器和高频 时钟脉 冲计 数器 预定标 因子 的改进
T法 分 区 测 速 方 法 ,并 设 计 了基 于 T MS 3 2 0 F 2 8 3 3 5增 强 型 正
△ = 0 -
测 速 的相 对 误 差 为 :
厂 _ _ ——]
一
『 ] 『 1 『 1 『 1 『 1 … 1 I l f ] 『 1 『 ] 呷
图 l l 法 测 速 原 理
测 速效 果优于其他方法 ,但实现起来过于复杂 。
T MS 3 2 0 F 2 8 3 3 5是 T J 公司 C 2 0 0 0系 列 的 一 款 浮 点 型
( 2 )
= ( 3) T法测速误差产生 的主要原 因是 m, 存在 士 1 的检测误差 。
在 低速 区域 ,编码器 的两个相邻 输出脉 冲间隔时 间对应 的高
交编码 脉冲单元 ( e Q E P)的分区测速方案 ,最后 在交流电机 调速实验平 台上验证 了该方案 的测速效果 。
转速计算公式 为 :
DS P控 制器 ,在 电机控制领域得 到广泛 应用 。采用 T I 官方提 供 的 T法测 速例程测 速时 ,测速 延时过长 ,难以在宽转 速范
n t =
测 速 的绝 对 误 差 为 :
(1 )
围 内实 现转速 的精确检测 。本 文从分析 T法在低速 区域能获
一伺 服控制与 应用
Se r v o c o nt r ol an d Appl i c a t i on
Hale Waihona Puke J t J : TM S 3 2 0 F 2 83 3 5羽I 坩: l } J = ℃ 编码器n c J 洲 迎 , 』 法没 计
I
J : TM S 3 2 O F 2 8 3 3 5羽I : I { } 编 码 器 的测 逃 法 设 计
量m 减小 ,测速的绝对误差 和相对误 差都会增加 ,测速精度
降低 。
厂■
_
』 删Ⅲ 砌 Ⅲ 砌 Ⅲ 砌 ㈣唧 砌 咖 猢 _
,
3改进 的 T法 测速
传统 的 T法在低速 区域具 有较高 的测 速精 度 ,在高速 区
图 3 超 低速 区 域测 速 原理
域测 速精度 降低 ,在 编码器两个 相邻输 m脉 冲间隔时间对 应 的高 频时钟 脉冲数量超 过高频脉 冲计数器 最大值 的超低速 区