2009年全国大学生数学建模竞赛C题
全国大学生数学建模竞赛历年赛题
全国大学生数学建模竞赛历年赛题1992:A?施肥效果分析 B?实验数据分解1993:A?非线性交调的频率设计 B?足球队排名次1994:A?逢山开路 B?锁具装箱1995:A?一个飞行管理问题 B?天车与冶炼炉的作业调度1996:A?最优捕鱼策略 B?节水洗衣机1997:A?零件参数 B?截断切割1998:A?投资的收益和风险 B?灾情巡视路线1999:A?自动化车床管理 B?钻井布局 C?煤矸石堆积 D?钻井布局2000:A?DNA序列分类 B?钢管购运 C?飞越北极 D?空洞探测2001:A?血管三维重建 B?公交车调度 C?基金使用2002:A?车灯线光源 B?彩票中数学 D?赛程安排2003:A?SARS的传播 B?露天矿生产 D?抢渡长江2004:A?奥运会临时超市网点设计 B?电力市场的输电阻塞管理C?饮酒驾车 D?公务员招聘2005:A 长江水质的评价和预测 B?DVD在线租赁C?雨量预报方法的评价 D?DVD在线租赁?2006:A出版社的资源配置 B 艾滋病疗法的评价及疗效的预测C易拉罐形状和尺寸的最优设计D 煤矿瓦斯和煤尘的监测与控制2007:A 中国人口增长预测 B 乘公交,看奥运C 手机“套餐”优惠几何D 体能测试时间安排2008:A 数码相机定位 B 高等教育学费标准探讨C 地面搜索D NBA赛程的分析与评价2009:A 制动器试验台的控制方法分析 B 眼科病床的合理安排C 卫星和飞船的跟踪测控 D会议筹备2010:A储油罐的变位识别与罐容表标定B 2010年上海世博会影响力的定量评估C输油管的布置D对学生宿舍设计方案的评价2011: A 城市表层土壤重金属污染分析B 交巡警服务平台的设置与调度C 企业退休职工养老金制度的改革D 天然肠衣搭配问题2012: A 葡萄酒的评价B 太阳能小屋的设计C 脑卒中发病环境因素分析及干预D 机器人避障问题2013: A 车道被占用对城市道路通行能力的影响B 碎纸片的拼接复原C 古塔的变形D 公共自行车服务系统2014: A 嫦娥三号软着陆轨道设计与控制策略B 创意平板折叠桌C 生猪养殖场的经营管理D 储药柜的设计2015: A ?太阳影子定位B?“互联网+”时代的出租车资源配置C? 月上柳梢头D? 众筹筑屋规划方案设计。
2009高教社杯全国大学生数学建模竞赛题目A题
个人资料整理仅限学习使用2009高教社杯全国大学生数学建模竞赛承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式<包括电话、电子邮件、网上咨询等)与队外的任何人<包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料<包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是<从A/B/C/D中选择一项填写):A我们的参赛报名号为<如果赛区设置报名号的话):所属学校<请填写完整的全名):成都理工大学参赛队员(打印并签名> :1.苏建龙2.黄雯丽3.傅戈平指导教师或指导教师组负责人 (打印并签名>:白林日期:2009年9月13日赛区评阅编号<由赛区组委会评阅前进行编号):2009高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号<由赛区组委会评阅前进行编号):全国评阅编号<由全国组委会评阅前进行编号): 制动器实验台的控制方法分析摘要:本文通过对车辆制动系统研究中台试及路试过程中各特征量之间的相关物理特性分析,以能量守恒思想为主导,分别建立了描述台试及路试过程车辆速度及能量变化规律的数学模型,在保证车辆制动实际物理过程精确模拟再现的原则下,以两过程速度变化时刻一致及制动力时刻对等为约束,实现两过程的统一,从而展开对补偿电流和离散可观测量之间关系的研究。
问题一:对于台试模拟过程的分析,需要将车辆系统在制动前平动动能等效转化为实验台上飞轮及转轴等机构转动时具有的转动动能,与此能量相对应的转动惯量被称为等效转动惯量。
因此,我们建立车辆平动动能与转动能动能的平衡方程,由此解得等效转动惯量为251.9989/equ J kg m =;问题二:依据转动惯量关于内径、外径及飞轮厚度的关系得到三种机械惯量:2/0083.30m Kg ,260.0166/kg m ,2120.0332/kg m ,可组成八种机械惯量。
2009高教社杯全国大学生数学建模竞赛A-B-C-D题评阅要点
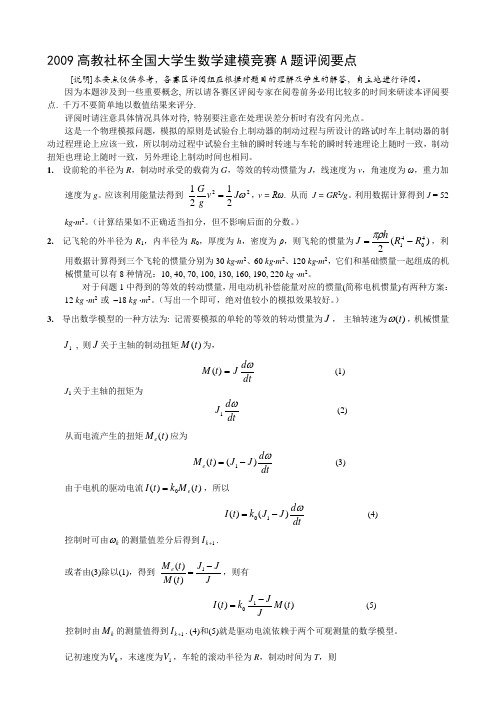
2009高教社杯全国大学生数学建模竞赛A 题评阅要点[说明]本要点仅供参考,各赛区评阅组应根据对题目的理解及学生的解答,自主地进行评阅。
因为本题涉及到一些重要概念, 所以请各赛区评阅专家在阅卷前务必用比较多的时间来研读本评阅要点. 千万不要简单地以数值结果来评分.评阅时请注意具体情况具体对待, 特别要注意在处理误差分析时有没有闪光点。
这是一个物理模拟问题,模拟的原则是试验台上制动器的制动过程与所设计的路试时车上制动器的制动过程理论上应该一致,所以制动过程中试验台主轴的瞬时转速与车轮的瞬时转速理论上随时一致,制动扭矩也理论上随时一致,另外理论上制动时间也相同。
1. 设前轮的半径为R ,制动时承受的载荷为G ,等效的转动惯量为J ,线速度为v ,角速度为ω,重力加速度为g 。
应该利用能量法得到 222121ωJ v g G =,v = Rω. 从而 J = GR 2/g 。
利用数据计算得到J = 52 kg ·m 2。
(计算结果如不正确适当扣分,但不影响后面的分数。
)2. 记飞轮的外半径为R 1,内半径为R 0,厚度为h ,密度为ρ,则飞轮的惯量为)(24041R R hJ -=πρ,利用数据计算得到三个飞轮的惯量分别为30 kg ·m 2、60 kg ·m 2、120 kg ·m 2,它们和基础惯量一起组成的机械惯量可以有8种情况:10, 40, 70, 100, 130, 160, 190, 220 kg ·m 2。
对于问题1中得到的等效的转动惯量,用电动机补偿能量对应的惯量(简称电机惯量)有两种方案:12 kg ·m 2 或 –18 kg ·m 2。
(写出一个即可,绝对值较小的模拟效果较好。
)3. 导出数学模型的一种方法为: 记需要模拟的单轮的等效的转动惯量为J , 主轴转速为()t ω,机械惯量1J , 则J 关于主轴的制动扭矩()M t 为,dtd Jt M ω=)( (1) J 1关于主轴的扭矩为 1d J dtω (2) 从而电流产生的扭矩()e M t 应为 1()()e d M t J J dtω=- (3) 由于电机的驱动电流0()()e I t k M t =,所以 01()()d I t k J J dt ω=- (4) 控制时可由k ω的测量值差分后得到1k I +.或者由(3)除以(1),得到 1()()e M t J J M t J-=,则有 10()()J J I t k M t J-= (5) 控制时由k M 的测量值得到1k I +. (4)和(5)就是驱动电流依赖于两个可观测量的数学模型。
全国大学生数学建模竞赛历年试题
全国大学生数学建模竞赛历年试题1.1992年A题:施肥效果分析;B题:试验数据分析;2.1993年A题:非线性交调的频率设计;B题:足球队拍名次;3.1994年A题:逢山开路;B题:锁具开箱;4.1995年A题:一个飞行管理问题;B题:天车与冶炼炉的作业调度;5.1996年A题:最优捕鱼策略;B题:节水洗衣机;6.1997年A题:零件的参数设计;B题:截断切割;7.1998年A题:投资的收益和风险B题:灾情巡视路线8.1999年A题:自动化车床管理B题:钻井布局C题:煤矸石堆积D题:钻井布局9.2000年A题:DNA序列分类B题:钢管订购和运输C题:飞越北极D题:空洞探测10.2001年A题:血管的三维重建B题:公交车调度C题:基金使用计划D题:公交车调度11.2002年A题:车灯线光源的优化设计B题:彩票中的数学C题:车灯线光源的计算D题:赛程安排12.2003年A题:SARS的传播B题:露天矿生产的车辆安排C题:SARS的传播D题:抢渡长江13.2004年A题:奥运会临时超市网点设计B题:电力市场的输电阻塞管理C题:饮酒驾车D题:公务员招聘14.2005年A题:长江水质的评价和预测B题:DVD在线租赁C题:雨量预报方法的评价D题:DVD在线租赁15.2006年A题:出版社的资源配置B题:艾滋病疗法的评价及疗效的预测C题:易拉罐形状和尺寸的最优设计D题:煤矿瓦斯和煤尘的监测与控制16.2007A题:中国人口增长预测;B题:乘公交,看奥运;C题:手机“套餐”优惠几何;D题:体能测试时间安排17.2008A题数码相机定位;B题高等教育学费标准探讨;C题地面搜索;D题NBA赛程的分析与评价.18.2009A题制动器试验台的控制方法分析B题眼科病床的合理安排C题卫星和飞船的跟踪测控D题会议筹备19.2010A题储油罐的变位识别与罐容表标定B题2010年上海世博会影响力的定量评估C题输油管的布置D题对学生宿舍设计方案的评价19.2011A题城市表层土壤重金属污染分析B题交巡警服务平台的设置与调度C题企业退休职工养老金制度的改革D题天然肠衣搭配问题20.2012A题葡萄酒的评价B题太阳能小屋的设计C题脑卒中发病环境因素分析及干预D题机器人避障问题21.2013 A题车道被占用对城市道路通行能力的影响B题碎纸片的拼接复原C题古塔的变形D题公共自行车服务系统。
2009数学建模C题 卫星跟踪解析

2009高教社杯全国大学生数学建模竞赛C题卫星和飞船的跟踪测控卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。
测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,如神州七号飞船发射和运行过程中测控站的分布如下图所示:图片来源/jrzg/2008-09/24/content_1104882.htm请利用模型分析卫星或飞船的测控情况,具体问题如下:1. 在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?2.如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H 的球面S上运行。
考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的?3. 收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围。
卫星的跟踪测控问题简析摘要:本文主要利用计算几何与图论的有关知识,分析和解决了卫星的跟踪测控问题,并应用仿真模拟手段对地球自转、非自转、不同轨道、不同纬度的卫星跟踪测控进行了较为详细的讨论。
针对问题一、问题二给出了求解过程和结果,并提出了优化改进模型,针对第三问通过神舟七号卫星参数和测控站点分布数据分析了测控站点对该卫星所能测控的范围。
(1)问题一考虑到所有测控站点与卫星的运行轨道共面,测控点个数只与卫星轨道的高度相关,将问题一转化为考虑卫星不同轨道高度、地球无自转情况下,测控站点最少测控模型求解问题。
从而得到:低轨道卫星(小于500km)至少需要10个测控站,中轨道卫星(500~2000km)至少需要5个测控站,高轨道卫星(2000~20000km)至少需要3个测控站,太阳同步卫星(700~1000km)至少需要7个测控站,地球同步卫星轨道高度(35786km)远大于7651.5km,至少需要3个测控站。
国赛数学建模c题
数学建模C题是一个具有挑战性的问题,需要我们运用数学知识和技能来解决。
下面我将尝试用600字回答该问题:问题:假设你是一个城市的规划者,你希望通过优化城市交通流量来提高城市的运行效率。
你得到了以下数据:每个交叉口的交通流量、交叉口的形状、周围建筑物的分布、道路的宽度和限制速度等。
请设计一个数学模型来预测未来的交通流量,并根据模型优化城市的交通规划。
首先,我们需要收集和分析数据,以便了解城市的交通状况和建筑物的分布情况。
在收集数据时,我们需要注意数据的准确性和可靠性,因为这些数据将直接影响我们的模型的准确性和可靠性。
接下来,我们需要使用统计方法对数据进行处理和分析,以便找出影响交通流量的关键因素。
我们可以考虑使用线性回归模型来预测未来的交通流量。
该模型通过使用过去的数据和当前的数据来预测未来的流量,并通过使用最小二乘法等统计方法来调整模型参数以最小化预测误差。
然而,线性回归模型可能无法捕捉到城市交通流量中存在的非线性关系和异常值,因此我们可以考虑使用支持向量机、神经网络等机器学习模型来进行预测。
除了预测交通流量外,我们还需要考虑如何优化城市的交通规划。
我们可以通过调整交叉口的形状、道路的宽度和限制速度等参数来优化交通流量。
我们可以使用优化算法(如遗传算法、粒子群算法等)来寻找最优解,以实现城市交通流量的最大化或最小化。
在优化城市交通规划时,我们需要考虑许多因素,如道路的安全性、居民的出行便利性、环境的保护等。
因此,我们可能需要使用多目标优化算法来同时考虑多个目标,以实现最优的交通规划方案。
此外,我们还可以通过与其他城市规划者和研究人员合作,不断优化我们的模型和算法,以适应城市交通流量的变化。
综上所述,要解决该问题,我们需要收集和分析数据、选择合适的预测模型和优化算法、综合考虑多种因素和不断优化我们的模型和算法。
只有通过不断地尝试和改进,我们才能更好地满足城市规划和发展的需求。
2009年数学建模竞赛C题全国一等奖论文
2009高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录(可供赛区评阅时使用):评阅人评分备注全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):卫星和飞船的跟踪测试摘要卫星和飞船对国民经济和国民建设有重要的意义,对卫星的发射和运行测控是航天系统的重要部分,理想状况下是对其进行全程跟踪测控。
本文通过建立空间直角坐标系,得到了卫星或飞船飞行的参数方程,并利用Matlab软件模拟出卫星飞行的轨迹图,借助图形,对卫星和飞船的跟踪测控问题进行建模,得到了在不同情况下对卫星或飞船进行全程跟踪测控所需建立测控站数目的一般方法。
问题1:在所有测控站都与卫星或飞船的运行轨道共面的情况下,采用CAD制图法和解析三角形两种方法,分别计算出在所有测控站都与卫星或飞船运行轨道共面的情况下至少应建立12个测控站才能对其进行全程跟踪测控。
问题2:通过建立空间直角坐标系,给出卫星或飞船的运行轨道的参数方程。
同时,验证了其运行轨道在地球上的投影轨迹为一关于赤道平面对称的环形带状区域。
最后,给出对卫星或飞船可能飞行区域进行全部覆盖所需建立测控站的模型。
问题3:对于陆地上的观测点,通过对“神舟七号飞船”相关信息查询,进行几何角度的和长度计算,得出观测点能观测到的区域约为s,再计算出飞船可能飞行的面积,通过进一步的优化与计算得出陆地上的观测点能观测的区域为18.67%.关键词:轨道星下点测控点相对运动优化一、问题重述卫星和飞船对国民经济和国民建设有重要的意义,对卫星的发射和运行测控是航天系统的重要部分,理想状况下是对其进行全程跟踪测控。
测控设备只能观测到所在点切平面以上的空域,实际上每个测控站的范围只考虑与地面成3度以上的空域。
往往要有很多个测控站联合测控任务。
问题1:在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应建立多少个测控站才能对其进行全程跟踪测控?问题2:如果一个卫星或飞船的运行与地球赤道有固定的夹角,且在离地面为H的球面S上进行。
2009全国数学建模竞赛C题解题思路及解析
为一个排队论问题加以继续研究。
解题思路 24
竞赛中的
几点注意事项
25
26
●
关键词的理解 优化目标 基本考点 难点 关键点(区分点) 例:08年A题—数码相机定位
27
●
●
●
关键点的清晰化 不断选择 (trade off ) 的过程 现实与理想之间的平衡 大局观 建模思路的顺畅展开
●
●
●
28
●
从而得到当前病人的预计住院时间区间为
T , T
第四问
若仍采用“一三方案”,效率较低,通过分 析可以发现主要原因是对视网膜与青光眼病人而 言,会造成病床使用效率降低。 通过有限种方案的仿真计算比较可知,采用 “二四方案” 或“三五方案”可使病床使用效率 有所提高。前者效率+公平总体效果较好,后者 效率较高,但公平性较差。
能力的欠缺也是一个原因。
解题思路 23
总体上说,竞赛论文完成得很好的不多,而在
一些基本问题上也做得不理想的论文却不在少 数,反映出学生对此类问题的生疏。另外,对 问题本质的理解不到位的也大有人在。
抽象来看,本问题可归类于一个通道分类-服
务台共享的多通道随机服务问题,对这样的问
题,排队论中还没有现成的解决方法,可以作
解题思路 9
数据分析做得比较深入的同学,会发现一 条隐含在数据中的关键信息:术前住院时 间过长是当前病床使用效率不高的主要因 素。这样一个关键信息的获得,会使得建 模更有方向感。
解题思路
10
第 一 问
●
主要考核对问题的考虑是否全面,对问题实质的理解是 否到位。评价指标分两类:效率指标和公平性指标。 效率指标——平均术前住院时间,或病床有效利用率。
全国大学生数学建模竞赛C题国家奖一等奖优秀论文
脑卒中发病环境因素分析及干预摘要本文主要讨论脑卒中发病环境因素分析及干预问题。
根据题中所给出的数据,利用SPSS20 软件进行相关性统计分析,分别对各气象因素进行单因素分析,进而建立后退法线性回归分析模型,得到脑卒中与气压、气温、相对湿度之间的关系。
同时在广泛收集各种资料并综合考虑环境因素,对脑卒中高危人群提出预警和干预的建议方案。
首先,利用SPSS20软件,从患病人群的性别、年龄、职业进行统计分析,得到2007-2010年男性患病人数高于女性,且男性所占比例有逐年下降趋势,女性则有上升趋势,因此,性别比例呈减小趋势。
分析不同年龄段患病人数,得到患病高峰期为75-77岁之间,且青少年比例逐年呈增长趋势,可见患病比例趋于年轻化。
同时在不同的职业中,农民发病人数最多,教师,渔民,医务人员,职工,离退人员的发病人数较少。
其次,由题中所给数据先进行单因素分析,剔除对脑卒中影响不显著的因素,得出气温、气压、相对湿度对脑卒中的影响程度大小,进而采用后退法线性回归分析建立模型,利用SPSS20对数据进行分析,求得脑卒中发病率与气温、气压、相对湿度之间的关系。
即发病率与平均温度成正相关,与最高温度成负相关,发病率与平均气压成正相关,与最低气压成负相关,与平均相对湿度成负相关,与最小相对湿度成正相关。
最后,通过查找资料发现,影响脑卒中的因素有两类,一类是不可干预因素,如年龄、性别、家族史,另一类是可干预因素,如高血压、高血脂、糖尿病、肥胖、抽烟、酗酒等因素。
分析这些因素,建立双变量因素分析模型,并结合问题1和问题2,对高危人群提出预警和干预的建议方案。
关键词脑卒中单因素分析后退法线性回归分析双变量因素分析一问题的重述脑卒中(俗称脑中风)是目前威胁人类生命的严重疾病之一,它的发生是一个漫长的过程,一旦得病就很难逆转。
这种疾病的诱发已经被证实与环境因素,包括气温、湿度之间存在密切的关系。
对脑卒中的发病环境因素进行分析,其目的是为了进行疾病的风险评估,对脑卒中高危人群能够及时采取干预措施,也让尚未得病的健康人,或者亚健康人了解自己得脑卒中风险程度,进行自我保护。
2009年数学建模C题优秀论文[1]
2009高教社杯全国大学生数学建模竞赛默认分类2009-09-25 21:41:02 阅读208 评论12 字号:大中小订阅卫星和飞船的跟踪测控模型摘要本文建立卫星或飞船全程跟踪测控方案的模型,通过图解法,分析法,利用天文知识,地理知识和物理知识对该模型进行求解。
要对卫星和飞船的发射和运行过程进行跟踪测控,就要分为两种情况,一是不考虑地球自转,二是考虑地球自转时,联系实际情况,建立合理数学模型,最终计算出结果。
对于问题1,假设地球是静止的,我们根据两个测控站之间的地心角和正弦定理,计算出最少所需的测控站个数N=[360°/a]+1。
对于问题2,由于地球是自转的,所以卫星或飞船在运行过程相继两圈不能回到同一点,我们首先引入星下点轨迹,根据星下点轨道为“8”字形的封闭曲线,得出测控站也应该建立在“8”字形的封闭曲线上,即是卫星或飞船投影在地球上的轨迹,根据星下点轨迹的方程为:φ=arcsin[sini.sin(ωst)] ,λ=Ω0+arctg[cosi.tg(ωst)]-ωst(2),再结合天体运动知识,计算出至少需要个才能达到全程跟踪的目的对于问题3,我们收集的是我国的“神舟七号”飞船的资料,“神七”在全球一共有16个测控站,由11站和6船组成,我们从中选择其中几个测控站作为研究对象,最后结果结合第一,二问的方程得出每个站的测控范围。
关键词:分析法全球跟踪测控星下点轨迹“8”字形地心角一、问题重述要对卫星和飞船发射及运行过程中理想状况下完全跟踪与测控,由于测控设备只能观测到该点所在切面上的空域,且与地面夹角在3度范围内测控效果不好,所以每个测控站是考虑与地面夹角3度以上的空域。
一个卫星或飞船在发射与运行的过程中,往往需要多个测控站联合完成任务,如神舟七号发射和运行过程中的测控站的位置。
要研究的问题:(1)在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
竞赛目的:
培养数学知识的应用能力;培养创新意识;培养新技术的应用能力;培养团体协作能力。
竞赛的发展方向:
以竞赛促进教学与科研;走向国际化。
更注重现有知识的应用于拓展。
本题特点:
问题条件不明确,比如:轨道形状等
任务少,且不明确
所用数学知识较多
不是优化问题,但包含优化思想
学生普遍做的不好
全国参考评审建议结果不正确
球面几何问题。
全国评审建议
(1)关于椭圆轨道:数值寻优
(2)关于地球自转参考建议不正确
正六边形覆盖。
平面上是最优的覆盖方式,2005年研究生竞赛题:hoc 网络蜂窝通讯及94年本科生竞赛题无线电频道分配。
球面上未必如此,评审建议结果有错,不考虑边界(应为48正六边形)
评审建议的具体算法 (1) 求球带的表面积
(2) 每个测控站的测控范围(球冠
(3) 考虑测控范围的重叠(球面正六边形,球冠的
0.827) (4) 考虑边界 论文处理 一.问题描述
主要是用自己的语言请该问题的背景及需要接军的问题以及自己打算怎样来处理该问题作简要介绍。
二.关于问题一(20分) 相关假设及符号说明 模型一
1.假设地球是球体,卫星轨道是圆
2.地球半径为R ,卫星高度为H
sin(18093*)sin 93
*87arcsin(sin 93)
3602*R R H
R
R H
n θθθ+=
--=-+⎡⎤=⎢⎥⎢⎥
一般结果:
或者给出不同n 的H 的范围。
模型二.
(15分)
1.假设地球是球体,卫星轨道是椭圆
2.地球半径为R ,卫星高度近地点为h , 远地点为H 。
卫星轨道椭圆方程:
cos (02)sin x a y b ϕ
ϕπϕ
=⎧≤≤⎨
=⎩ 地球球面圆方程:
cos (02)sin x c R y R θ
θπθ
=+⎧≤≤⎨
=⎩ 其中,
()/2,a R H h b =++=
考虑测控站i
的位置(,)i P R θ 测控轨道起点11(,,)i i Q a b ϕ, 测控终点12(,,)i i Q a b ϕ 向量:
(cos cos ,sin sin ),(cos ,sin )
i ij ij i ij i PQ a c R ba R OP R R ϕθϕθθθ=---=
i ij PQ 与OP 夹角87,
由夹角余弦公式得
cos cos sin sin cos sin 3(cos a b R c a θϕθϕθ
+--=
令
(,)cos cos sin sin cos sin 3(cos F a b R c a ϕθθϕθϕθ=+---易知,
(,)(,)(,)0F F F ϕθϕθϕθ=--=,,
给出了测控站位置与测控临界位置点的关系, 给出了两者中的一个就可以求出第二个。
利用迭代法计算测控站个数n.
流程如下:
(1)给定1θ,计算1112,ϕϕ (2)令2112ϕϕ=,计算2θ
…………
(3)当211n ϕϕ≥时,迭代结束。
(例对于神七,
014n θ==,)
(4)对1θ数值寻优
因为近地点必须被测控到,所以10.19940.1994θ-≤≤。
将该区间等分若干份,取较优的结果。
两组较优的结果,(342,200H h ==,神七数据)
1. (0.1994,0.6473, 1.1091, 1.5879,
2.0832, 2.5907,
3.1030)θ=±±±±±±± 共需14个测控站,其中最后两个观测站非常近,如果布置
13个测控站只有较少轨道测控不到。
2. (, 2.5986, 2.0737, 1.5784, 1.1168,0.6835,0.2734,0)θπ=±±±±±± 共需14个测控站,其中第一个测控站测控范围最大。
三 关于第二问 考虑地球自转(25分) 1.星下线方程及其轨迹
分别考虑世界坐标系OXYZ 及地球坐标系Oxyz ,设地球自转角速度为1ω,卫星角速度为2ω。
卫星轨道所在的平面与OXY 平面夹角为θ 坐标变换公式为
设卫星轨道参数方程为
222()cos ()cos sin ()sin sin X R H t
Y R H t Z R H t ωθωωθ
=+⎧⎪
=+⎨⎪=+⎩
则在地球坐标系下的方程为
1111cos sin 0sin cos 0001x t
t X y t
t Y z Z ωωωω-⎡⎤⎡⎤⎡⎤
⎢⎥⎢⎥⎢⎥=⎢⎥⎢
⎥⎢⎥
⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦
其在地球上的投影为(星下线参数方程)
当21n ωω=时
线,周期为2n π封闭的, 当
t 充分大时,充满
sin z R θ=±的地球带域,对应测控范围为
()sin z R H θ=±+
球面带状范围。
2.测控站个数上限估计 为了简化计算,假设测控站采取分纬度排列策略,
2111122cos cos sin 0()sin cos 0cos sin 001sin sin t x t t y R H t
t t z t ωωωωωθωωθ-⎡⎤
⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=+⎢
⎥⎢⎥⎢
⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦
2111122cos cos sin 0sin cos 0cos sin 0
1sin sin t x t
t y R t
t t z t ωωωωωθωωθ-⎡⎤
⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢
⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦
考虑同纬度等距分布n 个测控站的情况,则相邻测控站纬度改变为360/n γ=。
先考虑相邻两层的测控范围,记 1231
(,,),(,,)(,/2,)
i i i i i i P R P R P R αβαγβαγβ+++,
为相邻测控站,其测控范围分别为以123,OP OP OP ,为中心轴,半顶角为*θ的正圆锥。
11112221(,/2,),
(,/2,),()
i i i i P R P R αγβαγβββ++>,
则
11222211111(cos cos ,cos sin ,sin ),
(cos(/2)cos ,cos(/2)sin ,sin )(cos(/2)cos ,cos(/2)sin ,sin )
i i i i i i i i i i i i i i i OP R R R OP R R R OP R R R αβαββαγβαγββαγβαγββ==++=++
11,j OP OP θ夹角为。
cos *cos cos cos cos(/2)
cos sin cos sin(/2)sin sin i i ij i i i ij i i ij θβαβαγβαβαγββ=++++,
1,2j =
12*i i ββθ+=+
记
(,,)cos cos cos cos(/2)cos sin cos sin(/2)sin sin cos *cos cos cos(/2)sin sin cos *
i i i i i i i i i i i f βαββαβαγβαβαγββθββγββθ=++++-=+- (*)
第i 层测控站测控范围的最低纬度为2i β。
通过迭代便可以给出已知测控范围的测控站个数。
特别的,如果测控范围为12**θβθ≤≤,则其数学模型为:
nin n m
21,222211111121..(,,)0,1,2,
,*2,,,1,2,,**,***,(**)/*360/i i i i i i i m s t
f i m
i m i m
m n
βαβββθβββθβθθβθθθθθγ-===+=≥=≥≤≤≤+≥-⎡⎤⎢⎥=,,
*87arcsin(
sin 93)R
R H
θ=-+ 360/2*n θ⎡⎤≥⎢⎥
3. 关于神七的计算(342,6370,*42.2)H R ββ==≤= 根据神七数据(42.242.2β-≤≤,因为每个测控站测控的圆锥角为31.208,因此3m ≥。
(1) 如果3m =
因为测控范围是对称区间,可以考虑测控站对称分布,
即第一层的测控站分布在赤 道上。
先考虑18n =情况: 根据(*)式得到:
1222212.0378,27.6419,41.0123
βββ===,
不能全范围测控,因此全程测控需要的测控站数超过54
个。
(2) 如果4m =
最优解13,52n nm == 其中可取
1,23,48,31.3604ββ=±=±
(3)5m ≥
由第一问知12n ≥,所以当60nm ≥。
综上,52个测控站即能实现全程测控。
四. 关于第三问 沈七相关数据及分析
五.该问题的进一步思考 各层是否可以不等布置,如果能,如何确定个数? 六 结论与总结 参考文献。