第四章 形状和位置公差及检测-第四讲
第四章 几何公差与几何误差检测-4
② 保证机床工作台、刀架的运动精度则对导轨提出直线度 “ ”或平面度“ ”
③ 安装齿轮的箱体孔为保证齿轮的正确啮合,提出孔心线的
平行度“
”;
④ 定位孔、分度孔一般不用尺寸公差而是标“ 寸误差的累积。
”以避免尺
(3)满足功能要求的前提下应选用测量简便的项目
同轴度“ ”常用圆跳动“ ”代替,不过 应注意,圆跳动是同轴度和圆度形状误差的综合, 故代替时给出的圆跳动公差值应略大于同轴度公 差值,否则会要求过严。
图样上是否注出几何公差要求的原则:①凡几何公差要求用一般机床加 工能保证的,不必注出,其公差值要求应按GB/T1184-1996《形状和位置 公差未注公差值》执行。②对于那些对形位精度有特殊要求的要素,应按 标准规定在图样以公差框格的形式注出,但请注意:几何公差无论标注与 否,零件都有几何精度要求。
1、形状误差及其评定
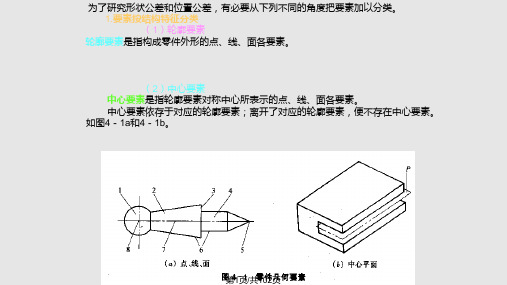
●形状误差是指实际单一要素对其理想要素的变动量。 理想要素的位置应符合最小条件。
实际被测轮廓线的直 线度误差值为f1。
未注公差各分H、K和L三个公差等级(它们的数值分别见 附表4-4至附表4-7 ),其中H级最高,L级最低。 ❖ 圆度的未注公差值等于直径尺寸的公差值,但不得大于径 向跳动的未注公差。 ❖ 圆柱度的未注公差可用圆柱面的圆度、素线直线度和相对 素线间的平行度的未注公差三者综合代替。其中每一项公 差可分别由各自的未注公差控制。 ❖ 平行要素的平行度的未注公差值等于要求平行的两个要素 间距离的尺寸公差值,或者等于该要素的平面度或直线度 未注公差值中较大值,基准要素则应选取要求平行的两个 要素中的较长者。
(2)基准中心要素: 基准中心要素相对于 理想边界的中心允许 偏离时。如同轴度的 基准轴线。
2、有时IP、ER、MR都能满足同一功能要求,但 在选用时应注意它们的经济性和合理性,下面 就单一要素孔、轴配合的几个方面来分析独立 原则IP与包容要求ER的选择。见P106.
形状和位置公差及检测[4]
![形状和位置公差及检测[4]](https://img.taocdn.com/s3/m/440c2545e518964bcf847cf3.png)
5.未注形位公差的规定(续)
未注直线度、垂直度、对称度和圆跳动各规定了H、K、 L三个公差等级,在标题栏或技术要求中注出标准及等级 代号。如:“GB/T1184—K”。 未注圆度公差值等于直径公差值,但不得大于径向跳动的 未注公差。 未注圆柱度公差不作规定,由构成圆柱度的圆度、直线度 和相应线的平行度的公差控制。 未注平行度公差值等于尺寸公差值或直线度和平面度公差 值中较大者。 未注同轴度公差值未作规定,可与径向圆跳动公差等。 未注线轮廓度、面轮廓度、倾斜度、位置度和全跳动的公 差值均由各要素的注出或未注出的尺寸或角度公差控制。
(1) 55k6圆柱面 从检测的可能性和经济性分析,可用径向圆跳动公差 代替同轴度公差,参照表4-27确定公差等级为7级,查表 4-22,其公差值为0.025mm。查表4-25和表4-20确 定圆柱度公差等级为6级,公差值为0.005mm。 (2) 56r6、45k6圆柱面 均规定了对2-55j6圆柱面公共轴线的径向圆跳动 公差,公差等级仍取7级,公差值分别为0.025mm和 0.020mm。 (3) 键槽14N9和键槽16N9查表4-27,对称度公差数值 均按8级给出,查表4-22,其公差值为0.02mm。 (4) 轴肩65公差等级取为6级,查表4-22,其公差值为 0.015mm。 (5) 其他要素 最终零件精度设计图示
C
A
B
图4-20 中心基准要素的标注
(3)当基准要素为中心孔时,基准符号置于中心引 出线的下方;当基准要素为圆锥体的轴线时,基准 线符号中的连线应与圆锥体直径尺寸线(大端或小 端)对齐或与圆锥体内空白的尺寸线对齐。
B4/7.5 GB145-85
B4/7.5 GB145-85
A
A
B
公差 形状和位置公差与检测PPT课件
第5页/共102页
§2 形位公差在图样上的表示方法
一、形位公差框格和基准符号 1.形状公差框格 形状公差框格共有两格。
如图4—2所示。
第6页/共102页
2.位置公差框格
位置公差框格共有三格、四格和五格等几种。如图4—3和4—4所示。
第7页/共102页
位置公差有基准要求。为了避免混淆和误解,基准所使用的 字母不得采用E、F、I、J、L、M、O、P、R等九个字母。
第49页/共102页
3. 位置度公差带 位置度公差涉及的被测要素有点、线、面,而涉及的基准要
素通常为线和面。位置度是指被测要素应位于基准和理论正确尺 寸的理想位置上的精度要求。位置度公差是指实际被测要素的位 置对其理想位置的允许变动量。位置度公差带是指以被测要素的 理想位置为中心来限制实际被测要素变动的区域,该区域相对于 理想位置对称配置,该区域的宽度或直径等于公差值。 例如图4—29a、图4—29b。该公差带的方位是固定的。
第19页/共102页
形位公差带是按几何概念定义的(但跳动公差带除外),与测量方法无关,所以 在实际生产中可以采用任何测量方法来测量和评定某一实际被测要素是否满足设计要 求。而跳动是按特定的测量方法定义的,其公差带的特性与该测量方法有关。
被测要素的形状精度(和)位置精度可以用一个或几个形位公差特征项目来控制。
对于由两个同类要素构成而作为一个基准 使用的公共基准轴线、公共基准中心平面等公 共基准,例如图4—15(a)和(b)所示。
第16页/共102页
四、形位公差的简化标注方法 1.同一被测要素有几项形位公差要求的简化标注方法 如 图4—16所示。公差框格重叠绘出。
2.几个被测要素有同一形位公差要求的简化标注方法 如图4—17(a)和(b)所示。可以只使用一个公差公差框格。
第四章 形位公差
符号
有或无基准要求 无 无 无
无
有 有
有
有 有 无或有 有 有 有 有
4-1
三、基准和基准体系
1、基准的概念 基准:确定被测要素方向或位置的依据。 例如: 用平台的工作面来模拟基准平面; 轴的轴线可用V形块来体现。
4-1 2、基准的类型 1、按几何特征可分为三种: 基准点、基准直线、基准平面。 2、根据它们的构成情况,可分为以下几种类型。 (1)单一基准 : 由一个要素(如一个平面、一条 轴线)建立的基准
1、当同一被测要素有多项形位公差要求,其标注方法又一致时, 可以将这些框格重叠绘制,并用一根指引线引向被测要素。
4-1
2、不同被测要素有同一公差要求时,可以在同一指引线上 绘制多个指示箭头分别引向各被测要素。
4-1
3、结构和尺寸都相同的几个被测要素,有相同的形位公差要求时, 可只对其中的一个要素进行标注,但应在该框格的上方说明被测 要素的数量。
4-1
(2)组合基准(公共基准): 由两个或两个以上的要素共同建立而作为单基准使用的基准。
4-1
(3)成组基准:由某一要素组所建立的基准。 基准c即为四孔所建立的成组基准。
4-1
4-1
三,几何公差的意义和要素 几何公差是图样中对要素
的形状和位置规定的最大允许 的变动量。
控制要素的形状或位置, 均是对整个要素的控制。
4-2
标注示例
4-2
轮廓度公差和前述四个形状公差项目相比, 具有下列不同的特点: 1、公差带形状由理论正确尺寸确定。
2、当被测轮廓相对于基准有位置要求时, 其公差带相对于基准应保持指定的位置关系。
4-2
课本P71, 表4-1
4-3
线轮廓度或面轮廓度公差是对零件表面的要求 (非圆曲线和非圆曲面),可以仅限定其形状误差, 也可在限制形状误差的同时,还可对基准提出要求。 前者属于形状公差,后者属于方向或位置公差。
互换性第四章形状和位置公差
表4-1 形位公差的分类
分类
形 状 公 差
形状或 位置公差
项目 直线度 平面度 圆度 圆柱度 线轮廓度 面轮廓度
符号
分类
定
位
向
置
公 差
定 位
跳 动
项目
平行度 垂直度 倾斜度 同轴度 对称度 位置度 圆跳动 全跳动
符号
❖二. 形位公差的术语与定义
1.要素(feature)
要素是构成零件几何特征的点、线、面,是对零件规 定形位公差的具体对象。如图4-2所示零件,其要素包括 平面、圆柱面、圆锥面、球面、球心、轴线等。
1) 在给定平面内: 定义:公差带是距离为公差值t的两平行直线之间的区 域。
序
示例
说明
号
A
每条刻线必须位于该表面
上距离为公差值 0.015 的
两平行直线之间。
B
圆柱表面上任一素线必须
位于轴向平面内,距离公
差值 0.02 的两平行直线之
间。
C
圆柱表面上任一素线在任
意 100 长度内必须位于轴
向平面内距离为公差值
b. 互 相 垂直的 两个方 向
公差带(棱线)必须位于水平方向 距离为公差值 0.2,垂直方向距离 为公差值 0.1 的四棱柱内。
3)在任意方向上;
用于限制空间直线在任意方向上的形状误差,其公差带为 圆柱体内的区域。
a.任意 方向上 定义:公差 带是直径为 公差值t的 圆柱面内的 区域
Фd 圆柱体的轴线必须位于直径为 0.04 的圆柱面内 加ф——表示公差带为一圆柱体, 因被测要素为轴线或中心平面等 中心要素,指引线的箭头应与尺寸 线对齐 整个零件的轴线必须位于直径为 公差值 0.05 的圆柱面内
第4章_形状和位置公差及检验(新)
第3章 形状和位置公差及检测
互换性与技术测量
3.1 概述
单一要素和关联要素(按功能要求分类) (1)单一要素:仅对其本身给出形状公差要求的要素 (2)关联要素:对其它要素有功能关系的要素。即规 定位置公差的要素。 形位公差的特征和符号:
第3章 形状和位置公差及检测
互换性与技术测量
3.1 概述
一、直线度 (3)在任意方向上:任意方向上的直线度在公差值 前加注“ ”,公差带是直径为公差值t的圆柱面内 的区域。(被测圆柱体d的轴线必须位于直径为公 差值0.04mm的圆柱体内)
φt
公差带
标注
第3章 形状和位置公差及检测
互换性与技术测量
3.3 形状公差
3.3.2 各项形状公差及其公差带
二、平面度---其被测要素是平面要素。公差带定义为 平面度公差带是距离为公差值t的两平行平面之间的 区域。左下图:被测表面必须位于距离为公差值0.1 的两平行平面内;右下图:被测表面上任意100³100 的范围,必须位于距离为公差值0.1的两平行平面内。
d
A
d
B
第3章 形状和位置公差及检测
互换性与技术测量
3.2 形位公差的标注
(三)基准要素的标注法 基准要素的标注用基准符号表示。基准符号由带 圆圈的大写字母和粗短线并用细实线连接表示
基准字母用英文大写字母表示。为不引起误解,国标规定 基准字母禁用E、I、J、M、O、P、L、R、F 9个字母。同时 基准字母一般不允许与图样中任何向视图的字母相同。 基准符号以带小圆的大写字母用连线 (细实线)与粗的短横 线相连。粗的短横线的长度一般等于小圆的直径。连线应 画在粗的短横线中间,长度一般等于小圆的直径。小圆的 直径为2倍字高。 基准要素为中心要素时,基准符号的连线与尺寸线对齐 。 基准要素为轮廓要素时,基准符号的连线与尺寸线应明显 错开,粗的短横线应靠近基准要素的轮廓线或它的延长线 上。
机械测量技术-几何公差形状、方向、位置和跳动公差
第四章 几何公差 形状、方向、位置和跳动公差
二、形位公差项目及符号 国家标准规定了14项形位公差,其名称、符号以及分类见表4⁃1。
表4-1 形位公差的分类与基本符号(GB/T 1182—2008)
第四章 几何公差 形状、方向、位置和跳动公差
三、形位公差的意义和要素 对产品的功能要求,除尺寸公差外,还要对产品的形位公差提出
态,且其对应中心要素的形状或位置误差等于图样上标注的形位公差时 的综合极限状态。
最大实体实效状态对应的体外作用尺寸称为最大实体实效尺寸MMVS。 轴和孔的最大实体实效尺寸分别用符号dMV和DMV表示。 dMV= dmax+t M DMV=Dmin-t M
• 6、最小实体实效状态和最小实体实效尺寸 最小实体实效状态MMVC是指实际要素在给定长度上处于
要求。 1)公差带的形状常用的有9种,见表4-2。 2)公差带的大小指公差带的宽度t或直径ϕt,如表4-2中所示,t即公差 值;取值大小取决于被测要素的形状和功能要求。 3)公差带的方向即评定被测要素误差的方向。 4)公差带的位置,形状公差带没有位置要求,只用来限制被测要素 的形状误差。
第四章 几何公差 形状、方向、位置和跳动公差
(2)实际(组成)要素。由接近实际(组成)要素所限定的工件实际 表面的组成要素部分。 如图(b)所示。 实际(组成)要素是实际存在并将整个工件与周围介质分隔的要素。它由
无数个连续点构成,为非理想要素。
几何要素定义之间的相互关系
4.提取组成要素与提取导出要素 (1)提取组成要素。按规定方法,由实际(组成)要素提取有限数目 的点所形成的实际(组成)要素的近似替代,如图(c)所示。 (2)提取导出要素。由一个或几个提取组成要素得到的中心点、中心 线或中心面,如图(c)所示。 提取(组成、导出)要素是根据特定的规则,通过对非理想要素提取
检验员测量技术02- 形状和位置公差及检测
(A)
(B)
控制实效边界原则
按最大实体要求给出形位公差时,要求被测实体不得起 过最大实体边界。如图所示,用位置量规检验零件同轴 度误差。工件被测要素的最大实体实效边界尺寸为 12.04mm,故量规测量部分的基本尺寸为 12.04mm,基准本身遵守包容要求,故基准遵守最 大实体边界,量规的定位部分的基本尺寸为 25mm。
形状公差带的方向和位置是浮动的,可随实际 被测要素的方向和位置而变动;
定向公差带的方向由基准确定,位置是浮动的; 定位公差带的方向和位置都是固定的; 跳动公差带的方向和位置都是固定的。
形位公差的标注
以公差框格的形式标注(两格或多格)
公差值:如果公差带为圆形或圆柱 形,公差值前加注,如果是球形, 加注S 基准:单一基准用大写表示;公共 基准由横线隔开的两个大写字母表 示;如果是多基准,则按基准的优 先次序从左到右分别置于各格。 指引线:用细实线表示。指引线的 方向必须是公差带的宽度方。
若用近似方法评定得到的误差值>形状公差值,则 被测要素不一定不合格,应再按最小区域法评定看 其结果是否小于形状公差值。
第四章 形状和位置公差及检测
第一节 概述
零件的几何要素与形位误差
图4-1 零件几何要素
1-球面 2-圆锥面 3-圆柱面 4-二平行平面 5-平面6-棱线 7-中心平面 8-素线 9-轴线 10球心
零件的几何要素与形位误差
几何要素:构成零件几何特征的点、线、面。 形位误差:实际几何要素相对于理想几何要素的偏差。
形位公差标注
形位公差代号的标注示例
形位误差的检测原则
与理想要素比较原则: 将被测要素与理想要素 相比较,量值由直接法或间接法获得。
测量坐标值原则: 测量被测实际要素的坐标值, 经数据处理获得形位误差值。
形状和位置公差及其检测64页PPT
第四章 形状和位置公差及其检测
第二节 形状公差与误差
3、圆度
圆度是限制实际圆对其理想圆变动量的一项指标,是对圆柱(锥)面 的正截面和球体上通过球心的任一截面提出的形状精度要求。
圆度公差带是指在同一正截面上,半径差为公差值t的两同心圆之间的区域。 如图所示:在垂直于圆柱或圆锥轴线的任一正截面上,圆柱面或圆锥
第四章 形状和位置公差及其检测
第一节 概述
形状和位置误差的产生 组成机器的各种零件,在加工过程中,由于机
床、刀具、夹具和工件组成的工艺系统存在误 差以及其他各种因素的影响,致使加工后获得 的实际零件,不仅产生尺寸误差,其形体与理 想形体相比,在几何要素本身的形状及有关要 素之间的相互位置上产生着差别,此差别即为 形状和位置误差。 为了保证机械产品的质量和零件的互换性,必 须对形位误差加以控制,国标规定了形状和位 置误差。
5、线轮廓度
线轮廓度是限制实际平面曲线对其理想曲线变动量的一项指 标。是对零件上曲线提出的形状精度要求。
线轮廓度公差带是指包络一系列直径为公差值t的圆的两包 络线之间的区域,诸圆圆心应位于理想轮廓线上。
如图4-15所示,在平行于正投影面的任一截面上,实际轮 廓线必须位于包络一系列直径为公差值0.04mm,且圆心在理论 轮廓线上的圆的两包络线之间。
第四章 形状和位置公差及其检测
第一节 概述
一、形位公差的符号及代号
1、形位公差项目的符号 国家标准:形状和位置两大类公差共有14个项目,
各特征项目及符号如表4-1的示例。
第四章 形状和位置公差及其检测
第一节 概述
2、形位公差的代号
国标规定,在图样形位公差应采用代号标注,无法采用代号标注 时,允许在技术要求中用文字说明。
第4章形位公差和公差带2误差检测和基准互换性与测量技术最新复习课件
图4-47
2021/1/4
15
4.3.3 基准和基准体系
位置公差和位置误差关系: 几何要素→关联要素→基准要素→基准
基准是具有正确形状的理想要素,是确定被测要素方向或位置的依据,在规定位置公差时, 一般都要注出基准。
在实际应用时,则由基准实际要素来确定。
2021/1/4
16
4.3.3 基准和基准体系 1.基准的建立
2021/1/4
2
4.3.1形状误差及其评定 图4-34 最小条件
2021/1/4
3
4.3.1形状误差及其评定
最小区域:
最小包容区域是指包容被测实际要素,且具有最小宽度或直径的两理想要素之间的区域。 简称最小区域。
最小包容区域的形状、方向、位置与各自的形状公差带的形状、方向、 位置相同,只是其大小 (宽度或直径)等于形 状误差值,由被测实际 要素确定。而公差带的 大小等于公差值,由设 计给定。
2021/1/4
22
4.3.3 基准和基准体系
2.基准的体现
建立基准的基本原则是基准应符合最小条件,但在实际应用中,允许在测量时用近似方法体现。 基准的常用体现方法有:模拟法 、直接法、分析法和目标法等。
2021/1/4
23
4.3.3 基准和基准体系 2.基准的体现
1) 模拟法 通常采用具有足够形位精度的表面来体现基准平面和基准轴线。
2021/1/4
12
4.3.2位置误差及其评定
基准轴线
2021/1/4
图4-44 同轴度误差的定位最小区域
13
4.3.2位置误差及其评定
2021/1/4
图4-45 点的位置度误差的定位最小区域
14
3.跳动误差及其评定: 1)圆跳动误差的评定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章 形状和位置公差及检测(第四讲,2学时)
※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※
主要内容:
1. 形位公差的选择原则(形位公差特征、基准要素、形位公差等级、公差原则、未注公差);
2. 形位公差选用举例;形位误差的评定及检测原则。
3. 习 题 课
4. 本章小结。
重点内容:
形位公差的选择原则;形位误差的评定。
难 点:
形位公差的选择。
教学方法:
1. 设计课堂提问,掌握学生理解情况。
2. 形位公差选用以多媒体为主要教学手段。
注:习 题 课讲解作业中出现的主要问题;根据学生的学习情况选讲一些内容。
实 验:安排实验“形位误差的测量”。
※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※
具体内容的详细教案如下:(加黑字表示板书内容或应有板书的地方)
注:首先对上次课的主要内容用2分钟进行小结,然后讲跳动公差与公差带。
二、形位公差的选择 (注:用课件讲解)
1.形位公差特征的选择
总原则:在保证零件功能要求的前提下,应尽量使形位公差项目减少,检测方法简便,以获得较好的经济效益。
具体应考虑以下几点:
(1) 考虑零件的几何特征 (2) 考虑零件的使用要求 (3) 考虑形位公差的控制功能 (4) 考虑检测的方便性
(由于零件种类繁多,功能要求各异,设计者只有在充分明确所设计零件的功能要求、熟悉零件的加工工艺和具有一定的检测经验的情况下,才能对零件提出更合理、恰当的形位公差项目。
)
2.基准要素的选择
包括:零件上基准部位的选择、基准数量的确定、基准顺序的合理安排等。
3.形位公差等级(公差值)的选择:
1) 形位公差等级的规定:除圆度和圆柱度0级、1~12级;其余分为1~12级,精度依次降低; 线轮廓度、面轮廓度以及位置度未规定公差等级。
注:在这里对每个等级的公差数值表(表4-19~表4-22,见教材)作简单说明。
2) 选择原则:即在满足零件使用要求的前提下,尽量选用低的公差等级。
注:这几点简单举例讲解。
选择方法:常采用类比法。
主要考虑以下几个问题:(见课件)
4.公差原则的选择(注:简单举例说明) 选择公差原则应根据被测要素的功能要求,充分发挥公差的职能和采取该公差原则的可行性和经济性。
独立原则:例如汽缸套内孔,为保证活塞环在直径方面的密封性,圆度或圆柱度公差要求严,需单独保证。
包容要求:主要用于需严格保证配合性质的场合。
最大实体要求:主要用于中心要素,保证可装配性(无配合性质要求)的场合。
例如,用于盖板、箱体及法兰盘上孔系的位置度等。
这些孔系的位置度公差采用最大实体要求时,可极大地满足其可装配性,提高零件的合格率,降低成本。
5.未注形位公差的规定(自学) 6.形位公差选用举例
注:首先对教材表4-27中同轴度、对称度和跳动公差常用等级的应用举例进行讲解,而后教材图4-23(见课件),讲解各部分形位公差选用。
(注:以上内容1学时)
第六节 形位误差的评定及检测
一、形位误差的评定
形位误差是指被测实际要素对其理想要素的变动量。
若被测实际要素全部位于形位公差带内为合格,反之则不合格。
1.形状误差的评定
1)最小条件
注:用下图说明什么是最小条件,在黑板上画图,对轮廓要素的最小条件,进行详细讲解、并说明最小包容区。
轮廓要素的最小条件 (见黑板) 中心要素的最小条件(见课件)
2)形状误差的评定:最小包容区的宽度或直径就是形状误差值。
注:用下图说明最小包容区如何作。
a) 评定直线度误差 b) 评定圆度误差 c)
评定平面度误差
最小包容区示例(见课件)
按最小包容区评定形状误差的方法,称为最小区域法。
最小条件是评定形状误差的基本原则,在满足零件功能要求的前提下,允许采用近似方法评定形状误差。
当采用不同评定方法所获得的测量结果有争议时,应以最小区域法作为评定结果的仲裁依据。
例如,常以两端点连线作为评定直线度误差的基准。
按近似方法评定的误差值通常大于最小区域法评定的误差值,因而更能保证质量。
2.定向误差的评定 定向误差值用定向最小包容区域(简称定向最小区域)的宽度或直径表示。
各误差项目定向最小包容区域的形状分别和各自的公差带形状一致,但宽度(或直径)由被测实际要素本身决定。
注:用教材图4-27(见黑板)说明定向最小包容区如何作。
3.定位误差的评定
定位误差是被测实际要素对一具有确定位置的理想要素的变动量,理想要素的位置由基准和理论正确尺寸确定。
对于同轴度和对称度,理论正确尺寸为零。
定位误差值:用定位最小包容区域(简称定位最小区域)的宽度或直径表示。
注:用教材图4-28(见课件)说明定位最小包容区如何作。
评定位置误差的基准,理论上应是理想基准要素。
由于基准实际要素存在形状误差,因此,就应以该基准实际要素的理想要素作为基准,该理想要素的位置应符合最小条件。
应注意最小包容区域、定向最小包容区域和定位最小包容区域三者的差异。
注:用下图(见黑板)说明三者的差异。
a) 形状、定向和定位公差:t 1 < t 2 < t 3
b) 形状、定向和定位误差评定的最小包容区域:f 形状< f 定向< f 定位
二、形位误差的检测原则(用课件讲解)
1.与理想要素比较原则图4-30(见课件) 2.测量坐标值原则 3.测量特征参数原则
4.测量跳动原则(注:结合图4-31讲解 )
5.控制实效边界原则(结合图4-31讲解 )
本 章 小 结(见课件)
f
形状 简单说明。
应小结如下内容:
1.形位误差的研究对象;
2.形位公差是形状公差和位置公差的种类及其公差带特征;3.公差原则是处理形位公差与尺寸公差关系的基本原则; 4.了解形位误差的评定方法。
5.应了解形位公差的选择依据;
6.形位误差的检测原则。