机械振动5多自由度振动7矩阵迭代法
第五章多自由度系统振动的近似解法

矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
λ
Mφ
邓柯莱法——求基频 邓柯莱法——求基频
邓柯莱法——求基频
邓柯莱法——求基频
邓柯莱法——求基频
邓柯莱法——求基频
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
矩阵迭代法——求前几阶固有频率
第五章 多自由度系统振动的 近似解法
多自由度系统的固有振动分析归结为示解 矩阵特征值的问题,当自由度数较大时, 上一章介绍的对特征多项式求根的方法手 算不再有实际意义。 本章重点介绍: 邓柯莱法 迭代法
邓柯莱法——求基频
• 记n阶方阵A为系统的动力矩阵,它定义为 • A=FM=K-1M
•式:
Kφ = 1
机械振动发展史
公元前1000多年,中国商代铜铙已有十二音律中的九律,并有五度谐和音程的概念。
在战国时期,《庄子•徐无鬼》中就记载了同频率共振现象。
人们对与振动相关问题的研究起源于公元前6世纪毕达哥拉斯(Pythagoras)的工作,他通过试验观测得到弦线振动发出的声音与弦线的长度、直径和力的关系。
意大利天文学家、力学家、哲学家伽利略(Galileo Galilei) 经过实验观察和数学推算,于 1 5 8 2年得到了单摆等时性定律。
荷兰数学家、天文学家、物理学家惠更斯(c . Huygens)于1 6 7 3 年著《关于钟摆的运动》提出单摆大幅度摆动时并不具有等时性这一非线性现象,并研究了一种周期与振幅无关的等时摆。
法国自然哲学家和科学家梅森(M. Mersenne)于1623年建立了弦振动的频率公式,梅森还比伽利略早一年发现单摆频率与摆长平方成反比的关系。
英国物理学家胡克(R. Hooke)于1 6 7 8 年发表的弹性定律和英国伟大的物理学家、数学家、天文学家牛顿(I. Newton)于1 6 8 7年发表的运动定律为振动力学的发展奠定了基础。
在下面对振动发展史的简述中,主要是针对线性振动、非线性振动、随机振动以及振动信号采集和处理这三个方面进行的。
而关于线性振动和非线性振动发展史的简介中,又分为理论研究和近似分析方法两个方面。
线性振动理论在18世纪迅速发展并趋于成熟。
瑞士数学家、力学家欧拉(L. Euler)于1728年建立并求解了单摆在有阻尼介质中运动的微分方程; 1 7 3 9 年研究了无阻尼简谐受迫振动,并从理论上解释了共振现象; 1 7 4 7 年对九个等质量质点由等刚度弹簧连接的系统列出微分方程组并求出精确解,从而发现线性系统的振动是各阶简谐振动的叠加。
法国数学家、力学家拉格朗日J丄.Lagrange)于1 76 2年建立了离散系统振动的一般理论。
最早被研究的连续系统是弦线,法国数学家、力学家、哲学家达朗伯J. le R. d, Alembert)于1 7 4 6 年发表的《弦振系统是弦线,法国数学家、力学家、哲学家达朗伯(J . 1e R. d, Alem bert)于1 7 4 6年发表的《弦振动研究》将他发展的偏微分方程用于弦振动研究,得到了弦的波动方程并求出行波解。
宁波大学3802机械振动2009,2011,2014,2016--2018年考博初试专业课真题
波形,可表示为 y Y sin 2 x ,其中 Y=4cm,L=10m,如右 L
图所示,求小车在以水平速度 v=36km/h 行驶时,车身上下振 动的振幅。(18 分)
4、在右图所示系统中,质量受到一常值力 F0 的作用,试用杜 哈梅积分求出零初值条件下的运动规律。(12 分)
F
l
l
c
k
k
F0 (cost sin 2t)
m c
θ1 θ2
θ3
2k
k 2k 4k
J
J 2J
3k
3m
2k
k
2m
m
第1页共1页
考试科目: 适用专业:
宁波大学 2014 年攻读博士学位研究生
入 学 考 试 试 题(A 卷) (答案必须写在答题纸上)
机械振动 工程力学
科目代码: 3802
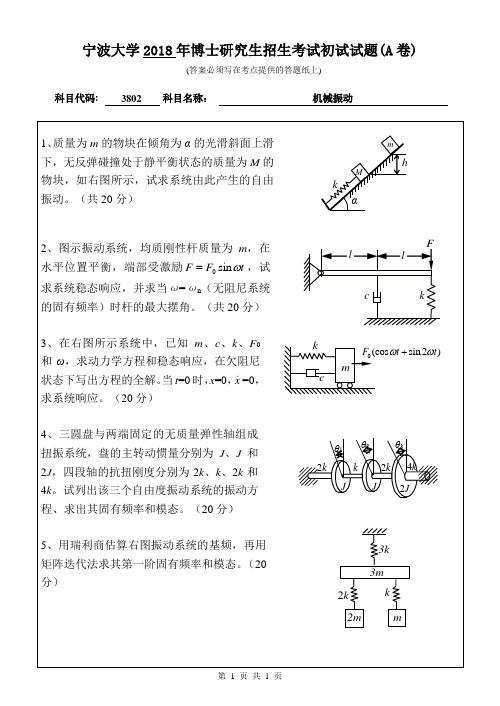
1、如右图所示 4 个系统,已知弹簧的刚度、轴 的抗扭刚度、悬臂梁端的等效弹簧刚度、圆盘的 转动惯量、物块质量等,分别写出其动力学方程, 并求其固有频率。(每个 5 分,共 20 分)
分)
θ1
θ2
k
k
J
4J 7k
6、用矩阵迭代法计算右图所示系统的基频和第 一阶振型。(18 分)
k
2k
3k
k
m
2m
3m
第1页共1页
宁波大学 2017 年博士研究生招生考试初试试题(B 卷)
(答案必须写在考点提供的答题纸上)
科目代码 : 3802 科目名称:
机械振动
1、右图所示单摆,摆杆质量忽略不计。求系统微幅 振动的动力学方程和通解;设摆杆初始偏角为θ0, 初速度为零,求系统的振动。(16 分)
第4章-多自由度系统振动分析的数值计算方法(25页)

第4章 多自由度系统振动分析的数值计算方法用振型叠加法确定多自由度系统的振动响应时,必须先求得系统的固有频率和主振型。
当振动系统的自由度数较大时,这种由代数方程求解系统固有特性的计算工作量很大,必须利用计算机来完成。
在工程中,经常采用一些简单的近似方法计算系统的固有频率及主振型,或将自由度数较大的复杂结构振动问题简化为较少阶数的振动问题求解,以得到实际振动问题的近似分析结果。
本章将介绍工程上常用的几种近似解法,适当地选用、掌握这类实用方法,无论对设计研究或一般工程应用都将是十分有益的。
§4.1 瑞利能量法瑞利(Rayleigh )能量法又称瑞利法,是估算多自由系统振动基频的一种近似方法。
该方法的特点是:①需要假定一个比较合理的主振型;②基频的估算结果总是大于实际值。
由于要假设主振型,因此,该方法的精度取决于所假设振型的精度。
§4.1.1 第一瑞利商设一个n 自由度振动系统,其质量矩阵为[]M 、刚度矩阵为[]K 。
多自由度系统的动能和势能一般表达式为{}[]{}{}[]{}/2/2TTT x M x U x K x ⎫=⎪⎬=⎪⎭&& (4.1.1)当系统作某一阶主振动时,设其解为{}{}(){}{}()sin cos x A t x A t ωαωωα=+⎫⎪⎬=+⎪⎭&(4.1.2)将上式代入式(4.1.1),则系统在作主振动时其动能最大值max T 和势能最大值max U 分别为{}[]{}{}[]{}2max max /2/2TTT A M A U A K A ω⎫=⎪⎬=⎪⎭(4.1.3)根据机械能守恒定律,max max T U =,即可求得{}[]{}{}[]{}()2I TTA K A R A A M A ω== (4.1.4)其中,()I R A 称为第一瑞利商。
当假设的位移幅值列向量{}A 取为系统的各阶主振型{}i A 时,第一瑞利商就给出各阶固有频率i ω的平方值,即{}[]{}{}[]{}2(1,2,,)Ti i i Ti i A K A i n A M A ω==L(4.1.5)在应用上式时,我们并不知道系统的各阶主振型{}i A ,只能以假设的振型{}A 代入式(4.1.4),从而求出的相应固有频率i ω的估计值。
计算n阶固有频率的一个简便公式

=
n i =1
kii mi
∑ p4n - 1 + p4n
n
=(
i =1
kii) 2 mi
-
∑n
2
i =1
k ii kjj mimj
-
j =2
i<j
k2ij mimj
(9) 式和 (10) 式联立消去 p4n - 1 , 得到
解 (11) 式得到
p4n -
∑ ∑ n
p2n
i =1
kii mi
+
n i =1
固有频率和主振型是振动系统中两个最重要的物理量 ,而固有频率是计算主振型的基础 。对于多自由度振 动系统 ,计算固有频率的近似方法现行的主要有六种 ———矩阵迭代法 、瑞雷 ( Rayleigh) 法 、邓克莱 (Dunkerley) 法 、 李兹 ( Ritz) 法 、子空间迭代法 、传递矩阵法等[1] ,其中以瑞雷法计算基频较为精确 ,但瑞雷法需要准确的估计主振 型列阵 A ,且结果始终比实际稍高[2] 。文献[ 3 ]曾利用根与系数的关系 ,导出了一个计算多自由度系统基频的近 似公式 。
如图 1 所示 ,简支梁的质量不计 ,沿梁长均匀地作用 3 个集中质量 ,梁的跨度为 l , 抗弯刚度为 EJ 。求梁作横 向振动时的各阶固有频率[1] 。
解 :系统的质量阵为
m
0
系统的柔度阵为
M=
2m
0
m
系统的刚度阵为
9 11 7
δ=
l3 768 EJ
11
16
11
7 11 9
图 1 梁的横向振动 Fig. 1 Transverse vibration of beam
本文将文献[ 3 ]加以推广 ,给出了一个计算多自由度系统各阶固有频率的近似公式 。并用实例说明了应用 本公式其计算过程较瑞雷法简便 ,精度与瑞雷法相当 。因此 ,本文所推出的公式在理论和实际中均有一定的实 用价值 。
结构动力学振动分析的矩阵迭代法

(2) 1
18.10 12.10 5.80
(2) 1
1.000 0.669 0.320
(3) 1
17.296 11.296 5.287
(3) 1
1.000 0.653 0.306
(4) 1
17.121 11.121 5.182
(4) 1
1.000 0.650 0.303
其中
D2 DS1
(13-31) (13-32) (13-33)
此时,可用下式近似计算频率
式中
22 (((2211)))mTm2(1)(20)
(1) 2
D
(0)
22
(13-34)
用这个方法确定第二振型以前,必须要先求得第一振型。
一般来说,第二振型的精度比第一振型大致上降低一位有效 数字,若想要第二振型分析时得到满意的结果,在计算滤型 矩阵S1时,用到的第一振型必须具有非常高的精度。
ˆn n2k 1mˆn
(13-2) (13-3)
D k 1m (动力矩阵) (13-4)
ˆn n2Dˆn
(13-5)
先假定试探位移向量(10),使它尽可能接近第一振型的
形状,而振幅是任意的。即:
(1) 1
n2 D(1 0)
(13-5a)
下标“1”表示第一振型,上标“(1)”表示第一次迭 代的结果。
或
(1) 1
N
n 1
Dφ
nn2Yn(0)(n1
)2
φ n n2Dφ n
(13-17) (13-18)
将其代入式(13-17)得
(1) 1
第5章线性振动的近似计算方法

2 1.3213 k / m 3 2.0286 k / m
取在2m质量上施加力P所产生的“静变形曲线”作为近似的第 一阶主振型,即:
[1, 2, 2.5]T
代入瑞利商公式:
R() 0.142857 k
m
1 0.3780
k m
2024年8月7日 与精确值相比,相对误差1.34%
R(
)
T T
1
1 fii mi
1
i1 i2 12 22
1
n2
对于梁结构系统,第二阶及第二阶以上的固有频率通常远
大于基频,因此左端可只保留基频项,有:
2024年8月7日 《振动力学》
1
12
1
12
1
22
1
n2
邓克利法
得到的基频是精确值的下限。
8
线性振动的近似计算方法 / 邓克利法
n
i 1
1
i2
1
12122源自1线性振动的近似计算方法 / 邓克利法
作用力方程的特征值问题: Kφ 2Mφ
位移方程的特征值问题: Dφ φ D=FM
特征值: 12 22 n2
1 2 n
关系: i 1/ i2 位移方程的最大特征根: 1 1/ 12
(基频) 对应着系统的第一阶固有频率
位移方程的特征方程: D I 0
aT Λa aT Ia
n
a 2j
2 j
j 1
n
a 2j
j 1
分析证明:
12 R( ) n2
若将瑞利商右端分子内的所有 j 换为 1
n
n
由于 1 是最低阶固有频率, 因此: R()
a
2 2
j1
机械振动教学大纲

《机械振动》教学大纲一、课程基本信息二、课程目的和任务《机械振动》是理论与应用力学等力学类本科专业必修的专业课程,同时也是机械、土建等工程学科本科和研究生培养的一门专业基础课程。
《机械振动》是一门系统地研究自然界和工程技术领域中振动现象的产生机理、运动规律、描述和控制方法的科学。
本课程教学应立足于加强学生的振动力学基础理论素养和相关基本技能培养,并着眼于拓宽学生的相关工程背景,提高科学建模能力,为今后学生能够创造性的从事相关理论研究或工程技术实践奠定必要的基础。
三、本课程与其它课程的关系本课程学习所需的主要选修课程为微分方程、矩阵理论、概率与统计、理论力学、材料力学等一系列数学、力学基础课程。
本课程教学应紧密结合相关的实验力学教学共同完成。
通过本课程的学习,为学生完成相关毕业设计课题奠定必备的基础。
四、教学内容、重点、教学进度、学时分配第一章绪论(2学时)1、主要内容机械振动的概念、振动理论研究体系、振动系统分类、简谐振动以及振动发展历史概述(选)2、本章重点机械振动的概念,振动理论研究体系,简谐振动3、本章难点振动系统分类4、教学要求从工程实践方面介绍广泛存在的振动现象,概括其特点和共同性,由此给出机械振动的科学概念。
指出振动理论的研究体系,分类的方法及振动力学的发展历史与现状,特别是指出振动力学在工程中的应用前景和应用价值;介绍相关参考书,提示学生在今后的学习中,从全书观点逐步理解分类的系统性。
第二章单自由度系统的自由振动(10学时)1、主要内容单自由度系统的无阻尼自由振动、等效质量与等效刚度、等效黏性阻尼和有阻尼自由振动。
2、本章重点建立振动微分方程、固有频率和振型、阻尼比、幅频和相频曲线与共振。
3、本章难点建立微分方程、固有频率、振幅减缩率和阻尼比。
4、教学要求介绍单自由度振动系统的工程实际背景,给出描述这一自然现象的力学模型,通过牛顿法和拉氏法建立数学模型及其简化理由和适用条件。
给出固有频率、阻尼特性及它们在自由振动中的物理意义,着重讲解幅频特性、相频特性曲线的物理意义及其在工程设计、控制中的重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仅对m3施加F3=1,各坐标的位移:
13 2016 年1月11日
1 1 1 1 A= 1 2 2 k 1 2 2.5
a 1/ k ,
《振动力学》
8
1 0 0 1 1 1 , A=1 1 2 2 M=m 0 1 0 k 1 2 2.5 0 0 2
wk 1 1 wk
1
wj ,k 1 1wj ,k
第一阶固有频率
1
1
w j ,k w j ,k 1
在具体计算过程中,前k次迭代均应进行归一化。
如使每个模态的最后元素成为1,使得各次迭代的模态之间具
有可比性,也避免计算过程中模态迭代的数值过大或过小。
在第k+1次迭代后,不需归一化,以算出基频。
归一化: w1 = (0.50 0.875 1)T
2016年1月11日 《振动力学》 9
1 1 2 m D= 1 2 4 k 1 2 5
w1 = (0.50 0.875 1)T
第二次迭代:
1 1 2 0.50 3.375 m 0.875 m 6.25 Dw1 = 1 2 4 k k 1 2 5 1 7.25
归一化:
w4 = (0.4626 0.8608 1)T
1 1 2 0.4626 3.3234 第五次迭代: m m Dw 4 = 1 2 4 0.8608 6.1842 k k 1 2 5 1 7.1842
归一化: w5 = (0.4626 0.8608 1)T w4
k
m
k
m
2k
2m
试用矩阵迭代法计算基频和第一阶模态: 解:先求系统的柔度矩阵, 由定义求或求刚度矩阵的逆阵。 仅对m1施加F1=1,各坐标的位移:
a11 1 / k , a12 1 / k ,
a21 a31 1 / k ,
仅对m2施加F2=1,各坐标的位移:
a22 a32 2 / k ,
w5 = (0.4626 0.8608 1)T w4 u (1)
终止迭代, w4 为第一阶模态。
因为Dw4 1w4
利用 w4 和 Dw4 的最后一个元素计算基频:
得: 1 7.1842
2016年1月11日 《振动力学》
m k
1
1
1
0.37308
k m
12
1 0 0 0.4626 (1)T (1) M 1 u Mu (0.4626 0.8608 1) 0 1 0 m 0.8608 2.955 m 0 0 2 1 正则化第一阶模态: 1 u(1) (0.2691 0.5007 0.5817 )T , m
k n j k ( j) C1u(1) C j D k w 1 u j 2 1 由于 j /1 1
每作一次迭代上式括号内第一项的优势就加强一次。
2016年1月11日 《振动力学》 4
k次迭代后:
k n j ( j) k k (1) D w 1 C1u C j u j 2 1 j /1 1 由于:
用K 1 A 左乘上式,得:
i 1 i2
Du(i ) i u(i )
( AM i AK )u(i ) 0
一般来说 D不是对称矩阵。
2016年1月11日 《振动力学》
其中, D AM, 称为动力矩阵,
2
任选系统的一个假设模态w ,它一般不是真实模态,但总能 表示为真实模态的线性组合:
归一化: w3 = (0.4628 0.8609 1)T
2016年1月11日 《振动力学》 10
1 1 2 m D= 1 2 4 k 1 2 5
w3 = (0.4628 0.8609 1)T
第四次迭代:
1 1 2 0.4628 3.3237 m m Dw3 = 1 2 4 0.8609 6.1846 k k 1 2 5 1 7.1846
k n j ( j) k (1) k k (1) 第一阶模态 C u D w 1 C1u C j u 1 1 1 j 2 w1 Dw w2 Dw1 wk Dwk-1
k wk 1 C1u(1)
5
k次迭代:
k n j ( j) k k (1) D w 1 C1u C j u j 2 1 w1 Dw w2 Dw1 wk Dwk-1
当迭代次数k足够大,除一阶模态以外的其余高阶模态成分 小于容许误差时,即可将其略去,得到:
每作一次迭代上式括号内第一项的优势就加强一次。
迭代次数愈多,上式括号内第二项所包含的高于一阶的模态 成分所占比例愈小。
将Dkw作为一阶模态的k次近似,记作wk,则矩阵迭代法的 计算公式为: w1 Dw
w2 D 2 w Dw1
2016年1月11日 《振动力学》
wk Dk w Dwk-1
2016年1月11日 《振动力学》
u (1)
11
1 1 2 m D= 1 2 4 k 1 2 5
w4 = (0.4626 0.8608 1)T
1 1 2 0.4626 3.3234 m m Dw 4 = 1 1 7.1842
归一化: w2 = (0.4655 0.8621 1)T 第三次迭代:
1 1 2 0.4655 3.3276 m m Dw 2 = 1 2 4 0.8621 6 . 1897 k k 1 2 5 1 7.1897
2016年1月11日 《振动力学》 7
例5.7-1:三自由度系统
1 x 1 0 0 2 1 0 x1 0 2 k 1 3 2 x2 0 m 0 1 0 x 3 x 0 0 2 0 2 2 x3 0
2016年1月11日 《振动力学》
从迭代过程看出,获得模态(收敛)的速度取决于 (r / 1 ) k
(r 2,, n) 趋于零的速度。 主要体现在两个方面:
一是,λ1比λ2大多少,相差越大,收敛越快,迭代次数越少;
二是,假设模态选取的准确性,w越接近于第一阶模态u1 ,
收敛速度越快,迭代次数越少。
k
m
k
m
2k
2m
系统的动力矩阵:
1 1 2 m D=AM 1 2 4 k 1 2 5
假设模态为: w= (1 1 1)T
第一次迭代:
1 1 2 1 4 m 1 m 7 Dw = 1 2 4 k k 1 2 5 1 8
有时从模型可以粗略推测第一阶模态中质量位移的比值关系。 矩阵迭代有个最大的优点“防止误差”。即使某一步迭代发 生 误差,只是意味着以新的假设模态重新开始迭代。 只不过延缓了收敛,但不会破坏收敛。 只要动力矩阵D正确,无论假设模态如何,总能得到近似解。
2016年1月11日 《振动力学》 14
高阶模态及固有频率
§5.7
矩阵迭代法
求多自由度系统的固有频率和模态是振动分析的主要内容。 随着自由度的增加,计算系统的固有频率和模态难度增大。 采用近似解,是个好办法,特别是借助计算机,很有效。 下面介绍矩阵迭代法求系统的最低几阶固有频率和模态。 对于系统的任意阶固有频率和模态都有:
Mu(i ) i Ku(i ) 0
w C1u C2u +Cn u
(1) ( 2)
( n)
C j u( j ) uC
j 1
n
T 其中u [u(1) u(2) u(n) ]为模态矩阵, C [C1 C2 Cn ]
上式左乘D矩阵:
n j ( j) ( 1 ) ( j) ( j) Dw C j Du C j j u 1 C1u C j u 1 j 2 j 1 j 1
用矩阵迭代法求出系统的第一阶模态和基频后,还可以用 同样的方法求第二阶模态和频率。
任选一个假设模态w ,总能通过迭代算得第一阶模态u(1),
有一个原因是假设模态w 中含有第一阶模态u(1)的成分C1, 若假设模态w 中第一阶模态u(1)的成分C1=0 ,则迭代的结果
n
k n j k ( 2) ( j) 2 C2 u C j k u 2 j 3
D k w C j kj u( j )
j 2
趋向于第二阶模态u(2) 。
因此求第二阶模态u(2)时,需使w中的C1=0。 同样求第三阶模态u(3)时,须使假设模态w的成分C1=C2=0。
2016年1月11日 《振动力学》 15
任选系统的一个假设模态w1,它一般不是真实模态,但总能 表示为真实模态的线性组合:
k Dk w 1 C1u(1) 于是k次迭代后的模态近似地等于第一阶真实模态。
对wk再作一次迭代, wk 1 Dk 1w Dwk
在wk和wk+1中任选第j个元素wj,k和wj,k+1 ,其比值关系如下:
2016年1月11日 《振动力学》
wj ,k 1 1wj ,k
6
k次矩阵迭代:
n n
上式再左乘一次D矩阵: n j ( 1 ) ( j) 2 Du D( Dw) D w 1 C1 Du C j 1 j 2
2016年1月11日 《振动力学》 3
w C1u(1) C2u(2) +Cn u(n)