车载高精度定位定向方法研究
高精度定位研究报告

高精度定位研究报告高精度定位技术是指通过一系列精密的测量手段和算法,对目标进行精确的定位和测量的技术。
它在许多领域都有广泛的应用,包括航空航天、导航导弹、科学研究等。
本文主要介绍高精度定位技术的研究现状和发展趋势。
目前,高精度定位技术主要包括卫星定位系统和地基测量系统两种形式。
卫星定位系统是通过卫星信号进行测量和定位的技术,其中最广泛应用的就是全球定位系统(GPS)。
GPS系统通过多个卫星之间的距离差异来进行定位,可以达到亚米级的定位精度。
此外,还有欧洲伽利略系统、中国北斗系统等,它们也在不断改进和发展中。
地基测量系统主要是通过地面上的测量设备进行测量和定位的技术。
常见的地基测量系统包括全站仪、激光测距仪等。
这些设备通过测量目标与测量设备之间的距离和角度,来进行精确的定位。
地基测量系统一般可以达到毫米级的定位精度,特别适用于建筑测量、地质勘探等领域。
随着科技的不断发展,高精度定位技术也在不断创新和改进。
目前研究人员主要集中在提高定位精度、提高定位可靠性以及减小设备体积和消耗能量等方面。
提高定位精度的方法包括多智能体系统,即同一目标同时接收多个卫星信号进行测量,并进行数据融合处理;使用高精度的测距设备,如激光测距仪等;提高测量设备的精度和稳定性,如增加传感器的灵敏度和准确度等。
此外,研究人员还在探索新的定位方法,如利用光学信号进行定位、利用声波进行定位等。
这些方法在特定环境下可以达到更高的定位精度,并且能够克服卫星信号受限的问题。
同时,人工智能和大数据等新技术的应用也为高精度定位技术的发展带来了新的机遇和挑战。
综上所述,高精度定位技术是一项具有广泛应用前景的技术。
随着科技的不断发展,高精度定位技术的研究也在不断创新和改进。
未来,我们可以预见高精度定位技术将在更多的领域得到应用,并为人类的科学研究和生活带来更多的便利和发展机遇。
高精度的车辆定位与导航技术
高精度的车辆定位与导航技术随着科技的不断发展,车辆定位与导航技术也得到了巨大的突破与进步。
高精度的车辆定位与导航技术在现代交通领域中发挥着重要的作用。
本文将重点讨论高精度的车辆定位与导航技术的原理、应用以及未来的发展方向。
一、高精度的车辆定位技术1. 全球定位系统(GPS)全球定位系统(GPS)是一种基于卫星定位的技术,通过一组特定的卫星将车辆的位置信息传输给接收器。
GPS技术广泛应用于车辆导航系统中,为驾驶者提供准确的位置和导航信息。
2. 惯性导航系统惯性导航系统利用加速度计和陀螺仪等设备来测量和监测车辆的加速度和角速度,从而计算出车辆的位置和方向。
与GPS相比,惯性导航系统不依赖于卫星信号,因此在隧道、城市峡谷等GPS信号较弱或无法接收到信号的区域,仍能提供可靠的位置信息。
二、高精度的车辆导航技术1. 实时交通信息高精度的车辆导航系统可以实时获取道路上的交通信息,并通过计算最优路径来避免拥堵。
通过与其他车辆和交通基础设施进行数据交互,车辆导航系统可以提供精确的车流状况、交通事故等信息,有效地规划驾驶路线。
2. 三维导航高精度的车辆导航技术综合利用GPS定位、惯性导航和地图数据,提供精准的三维导航功能。
三维导航可以准确显示车辆所处位置周围的建筑物、地形等信息,帮助驾驶者更好地理解驾驶环境,提供更安全、便捷的导航服务。
三、高精度车辆定位与导航技术在实际应用中的优势1. 提高驾驶安全性高精度的车辆定位与导航技术可以及时提供车辆位置信息,帮助驾驶者避开交通拥堵、危险路段,减少事故的发生。
同时,三维导航技术可以提供更精确的地图信息,降低驾驶误差,提高驾驶的安全性。
2. 提供智能化导航体验高精度的车辆定位与导航技术可以根据驾驶者的个人喜好和需求,为其提供个性化的导航服务。
例如,系统可根据驾驶者的音乐喜好、餐厅偏好等提供相关推荐,使导航体验更加智能化和便捷。
3. 促进交通系统发展高精度的车辆定位与导航技术可以收集大量的交通数据,为城市交通系统的规划和管理提供有力支持。
高精度车载(厘米-分米-亚米-米级精度)定位方案精华版
高精度车载(厘米/分米/亚米/米级精度)定位方案精华版1.市场需求1)更高定位精度随着两客一危、港口、机场、矿山、火电厂、农业机械、叉车、军车、特种车辆等对高精度定位需求的涌现,众多行业车辆的用户已不满足于GPS的10-20米的定位精度,希望能提高到厘米级、分米级、亚米级、米级精度。
相关应用需求简述如下,两客一危需要定位到亚米级,这样可以判定在哪个车道行使,监控管理部门可以随时监控车辆是否违规行驶到快车道,转弯速度是否超标等,更好的保证车辆安全。
港口车辆需要定位到亚米级,可以实现车道级定位,港区实现更精细化监控和管理;机场车辆在机场内需要沿着固定白线行走,后台监控管理系统要求车辆行驶路线偏差在1米以内,更好的保证飞机、车辆和人员的安全;矿山、火电厂等装卸和采掘车辆,需要精确在矿石、煤炭等堆体区域作业,车辆位置精度要求从厘米级到1米;自动驾驶农机需要定位精度在2厘米,实现农机在田里按预定轨迹的自动驾驶,保证农作物的间距合适,充分利用土地资源,提高农作物产量;叉车需求精度在厘米级到分米级,后台监控管理系统会记录货物的存放位置,提高存储和出货效率。
2)车辆方向角度需求在无人驾驶领域的各种车辆,除了需要高精度定位外,还需要在行驶和静止状况下测量车辆的方向,希望能达到0.05°、0.1°、1°的方向精度。
3)所有区域能有效定位卫星定位在有遮挡区域会出现精度变差或无法定位的情况,用户希望能解决这个问题,实现所有区域的有效定位。
2.方案简介针对这些需求,上海北寻信息科技有限公司推出了一系列的高精度卫星接收机产品,综合应用北斗、GPS、GLONASS、Galileo等各种全球卫星定位系统,实现了厘米级、分米级、亚米级、米级的定位精度,以及0.05°、0.1°、1°的方向精度。
产品包括高中低端系统产品,价格从几百元、几千元到几万元,满足各行业对不同精度、性能和价格的要求。
汽车定位导航系统的研究分析
汽车定位导航系统的研究分析随着人们对汽车出行的需求日益增长,汽车定位导航系统已成为现代汽车中不可或缺的一部分。
这种系统通过卫星定位技术和地图数据,为驾驶员提供准确的导航信息,使其能够更安全、高效地达到目的地。
1. 卫星定位技术:汽车定位导航系统主要依赖于全球卫星定位系统(GNSS)来获取车辆的准确位置信息。
GNSS包括美国的GPS、俄罗斯的GLONASS、欧盟的Galileo和中国的北斗系统。
研究人员需要对这些系统进行详细研究,了解其工作原理、性能特点和精度限制,以提高汽车定位导航系统的定位准确性和可靠性。
2.地图数据处理:地图数据是汽车定位导航系统的核心部分,它包括道路网络、建筑物、交通设施等信息。
研究人员需要对地图数据进行处理和分析,以提取其中的有用信息,并为导航算法提供准确的输入。
此外,研究人员还需要关注地图数据的更新和实时性,确保导航系统能及时反映道路变化和交通状况。
3.导航算法研究:导航算法是汽车定位导航系统的核心技术之一、研究人员需要设计和优化导航算法,以实现最短路径规划、实时路况预测、动态路径优化等功能。
同时,研究人员还需要对导航算法的性能进行评估和改进,以提高导航系统的准确性和稳定性。
4.用户界面设计:用户界面是汽车定位导航系统的重要组成部分,它直接影响用户的使用体验和使用效果。
研究人员需要对用户界面进行设计和优化,以提供简洁、易用、直观的操作方式,并确保界面信息的清晰度和可读性。
在汽车定位导航系统的研究过程中,还涉及到一些挑战和问题,需要进一步研究和解决。
首先,汽车定位导航系统需要在复杂的道路环境中进行定位和导航,如城市高楼、隧道、山区等。
这些环境会对卫星信号的接收造成干扰,影响导航系统的性能。
因此,研究人员需要设计抗干扰算法,提高导航系统在复杂环境下的定位准确性。
其次,导航系统还需要实时获取和处理大量的地图数据和路况信息。
这些数据的处理和传输速度对导航系统的响应时间和实时性有着重要影响。
无人驾驶车辆高精度定位技术的使用方法
无人驾驶车辆高精度定位技术的使用方法随着科技的不断发展,无人驾驶车辆正逐渐成为现实。
为了确保无人驾驶车辆能够准确地导航和定位,高精度定位技术的应用变得尤为重要。
本文将介绍无人驾驶车辆高精度定位技术的使用方法及其在实际应用中的意义。
一、差分全球定位系统(DGPS)差分全球定位系统(DGPS)是一种常用的高精度定位技术,它通过与参考站相连的基站进行通信,用参考站的已知精确位置来对车辆的位置进行校正。
这种技术能够实现亚米级的定位精度,非常适用于无人驾驶车辆的定位需求。
在使用DGPS技术时,首先需要安装基站来获取参考站的真实位置信息。
基站会通过无线电信号将这些信息传输给车辆上的接收器设备。
接收器设备会比较接收到的信号和本地存储的参考站的位置信息,以确定车辆的准确位置。
这样,定位误差将被大大减小,无人驾驶车辆将能够更准确地导航和行驶。
二、激光雷达激光雷达是另一种常用的高精度定位技术,它利用激光器发射出的激光来扫描周围环境,并通过接收返回的反射波来计算出距离和方向。
激光雷达能够提供非常精确的三维地图数据,对于无人驾驶车辆的定位和避障非常重要。
在使用激光雷达进行定位时,首先需要在车辆上安装一个或多个激光雷达传感器。
这些传感器会不断扫描周围环境,将扫描数据传输给车辆的计算机系统进行处理。
计算机系统将根据扫描数据生成一个高精度的三维地图,并结合其他传感器数据来确定车辆的位置。
这样,无人驾驶车辆将能够在未来的行驶过程中准确地导航和定位。
三、惯性导航系统惯性导航系统是一种可以测量和跟踪车辆在空间中的加速度和角速度的技术。
通过测量这些数据,惯性导航系统可以计算出车辆的位置和姿态。
惯性导航系统可以提供很高的定位精度,并在无GPS信号的情况下仍然有效。
在使用惯性导航系统进行定位时,车辆上会安装多个惯性测量单元(IMU),包括加速度计和陀螺仪。
这些传感器会不断地测量车辆的加速度和角速度,并将数据传输给计算机系统进行处理。
计算机系统会根据测量数据进行积分运算,从而得出车辆的位置和姿态信息。
智能车辆位置定位系统的研究与设计

智能车辆位置定位系统的研究与设计摘要:智能车辆位置定位系统是现代汽车领域中的一个重要技术。
本文通过对智能车辆位置定位系统的研究,重点分析了GPS、惯性导航系统和混合导航系统这三种常见的定位技术,并对它们进行了比较与评估。
同时,文章还介绍了智能车辆位置定位系统的设计原理和流程,并探讨了该系统在汽车行驶安全、导航系统以及车辆自动驾驶等方面的应用前景。
1. 引言智能车辆的发展为交通运输领域带来了巨大的变革。
其中一个关键技术就是车辆位置定位系统。
智能车辆位置定位系统不仅能够实现精确定位,还能为车辆导航、路径规划和自动驾驶等提供支持。
本文旨在对智能车辆位置定位系统进行研究与设计,探讨其原理、技术以及应用前景。
2. GPS定位技术GPS(全球定位系统)是一种基于卫星导航的定位技术。
通过接收多颗卫星发射的信号,并计算信号的传播时间和卫星的位置,就可以确定接收器的位置。
GPS定位技术具有全球覆盖、高精度和高可靠性的优点,已经广泛应用于智能车辆定位系统中。
然而,GPS定位技术在密闭环境、高层建筑区域以及天气恶劣的情况下,会受到信号遮挡和干扰,导致定位不准确。
3. 惯性导航系统惯性导航系统是通过测量车辆的加速度和角速度改变来实现定位。
惯性导航系统具有短时间内高精度的优点,对于短距离行驶的定位非常有效。
然而,惯性导航系统存在积分漂移问题,时间越长精度越低。
为了解决这个问题,通常会将惯性导航系统与其他定位技术,例如GPS技术相结合,形成混合导航系统。
4. 混合导航系统混合导航系统将多个定位技术相结合,通过各自的优势来弥补不足。
常见的混合导航系统是将GPS技术和惯性导航系统相结合。
GPS提供长时间内的位置精度,而惯性导航系统则提供短时间内的高精确度。
通过融合两种技术的数据,可以获得更精确、稳定的车辆定位结果。
混合导航系统在智能车辆位置定位系统中得到了广泛应用。
5. 智能车辆位置定位系统的设计智能车辆位置定位系统的设计包括以下几个步骤:(1)传感器选择:选择合适的传感器,例如GPS接收器、加速度计和陀螺仪等。
车载定向定位精对准

车载定向定位精对准
精对准通常在粗对准结果的基础上进行姿态和速度解
算,并从速度误差中估计姿态失准角,算法本身具有一定的
抗晃动能力。常用的静基座精对准方法有最小二乘参数辨识、
卡尔曼滤波和捷联罗经法等,其中卡尔曼滤波法最为常用。
一、精对准
二、可观测性与对准精度分析
各种精对准方法都直接或间接利用了静基座条件下载
体真实速度(或平均有效速度)为零这一观测量进行对准,
所以SINS本身的误差方程决定了状态的可观测性和对准的
极限精度。
高精度车载导航定位系统的研究
系, 并作 为人机交 互 的工 作平 台 。 系统集 成 了地 该
车载 导航最 重 要 的部 分 此 , 文针对 车辆 的定 为 本 位 与导航 展开 研究 。
配 置为 :0 30 MHz的C U; P 内存 采 用6 / 2 h— 4 1 8M i
S edC pe F卡存储 器 ; 配有 12mm(. ) 清晰 6 64i 高 n 真 彩数字 、 触摸屏 ;M/ F AM 收音 功能 ; 有 D 配 VD 光驱, 可播 放各类 D出 VC 以及 MP 3等 多媒体 = 一 不一 VD、 D 文件 ; 数字 地图容量 大 , 目前提 供 12个 城市 地图 7
收稿 日期 :0 60— 6 修改稿 收到 日期 :0 6I -7 2 0—8 1 ; 2 0一 II
目前 , S民用 动 态定 位 精 度可 达 到 1 GP 5m,
维普资讯
交通 与期
维普资讯
高精 度 车栽 导 航 定 位 系统 的研 究 —— 黄 袁斌 孙 永 荣 沈 雪松 陈 武
高精度车载导航定位系统的研究
黄袁斌 孙 永 荣“ 沈 雪松 陈 武。
( 南京航空航天大学 南京 2 0 1 ) ( 10 6 香港理工大学 。 香港 ) 扁 要 通过对 车载导航 系统结构 、 功能的分析 , 车辆 的高精度导航 定位进行 了研究 。 对 在常
_ 图+图 =地 I l 地 城 市
I I L — —r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
匣亟互亘司篓釜篓鐾銎兰兰鳖兰竺坠
文章编号:1671—4598(2011)10—2501—03中围分类号:V249.3文献标识码:A基于捷联惯导/里程计的车载高精度定位定向方法研究
杨波1,王跃钢1,彭辉煌2
(1.第二炮兵工程学院自动控制系,陕西西安710025;2.第二炮兵驻8602厂军事代表室。湖北孝感432100)
摘要:研究了一种基于捷联惯导系统和里程计进行车载高精度定位定向的方法;采用里程计与捷联惯导中的陀螺仪构成航位推算系统,建立了航位推算系统的误差模型l为了增强航位推算姿态误差的估计效果。将载车姿态与位置信息一起作为量测。构建组合定位定向的量测方程l采用Sage-Husa自适应滤波设计捷联惯导/里程计组合定位定向算法,以增强算法对外界环境和载车机动的鲁棒性;仿真结果表明.基于捷联惯导/里程计的车载定位定向方法能够达到士20.4m(3d)的定位精度,航向精度达到土3.1’(30).水平姿态精度达到士0.6’(3d)。关键词:捷联惯导I里程计,定位定向l自适应滤波ResearchonPrecisePositionandOrientationDeterminationfor
VehicleBasedonSINS/Odometer
YangB01WangYuegan91PengHuihuan92(1.DepartmentofAutomation,SecondArtilleryEngineeringCollege,Xi’an710025,China;2.MilitaryDeputyCIfficeofSecondArtilleryinPlant8602,Xiaogan432100,China)
Abstract:Amethodofprecisepositionandorientationdeterminationforvehiclebasedstrapdowninertialnavigationsystem(SINS)
andodometerwasresearchedinthispaper.TheodometerandgyroscopesinSINSwereadoptedtOconstructthedeadreckoningsystem,and
modelsofthedeadreckoningsystemwerebuilt.InordertOenhancetheestimateeffectofattitudeindeadreckoning。theattitudeandpositionofthevehiclewerechozentheobservations,andthustheobservationequationofintegratedpositionandorientationdetermi—nationwerebuilt.Sage-Husaself-adaptivefilteringwasadoptedinthedesignofSINS/odometerintegratedpositionandorientationdetermi—nationalgorithm,whichenhancetherobustnesstooutsideenvironmentandmaneuverofthevehicle.Simulationresultsshowedthat,po—
sitionaccuracyofthispositionandorientationdeterminationmethodforvehiclebasedSINS/odometerreached士20.4m(30).heading
curacyreached士3.1’(3口),andhorizontalattitudeaccuracyreached士0.6’(3d).Keywords:strapdowninertialnavigationsystem(SINS);odometer;positionandorientationdetermination;self—adaptivefilter
O引言
现代战争中,为了增强车载武器系统的快速机动性,要求诸如发射车、指挥车、装甲车等特殊军用车辆具备精确、快速的定位定向能力,以期实现。停车就打”,甚至“边走边打”;同时,还要求车载定位定向系统在战场恶劣环境下具备较强的独立自主性和抗干扰性。目前,国内外广泛研究采用了以卫星/航位推算或惯导/卫星组合导航为主要模式的车载定位定向技术D-33。但是,由于卫星导航信号容易被遮挡或干扰,在战场环境下不能绝对依赖,而一旦卫星导航失效,仅靠航位推算或惯导本身无法实现较高精度导航定位,因此上述两种模式的独立自主性和抗干扰能力较差。针对自主性和抗干扰问题,采用惯导与里程计进行组合导航是一个有效的解决办法。文献[4]将捷联惯导与里程计输出的速度之差作为组合导航量测。有效减缓了定位误差的发散
收稿日期:2011—03—18l傣回日期:2011—05—10。基金项目:中国博士后科学基金资助(20090461471).作者简介:杨渡(1980一)。男.江苏省滨海县人,讲师,博士后,主
要从事惯性导航与组合导航等方向的研究.
速度,但随着时间推移定位误差仍然明显发散,而且未考虑里程计刻度系数误差的影响。事实上,里程计刻度系数误差对航位推算精度的影响比较大[5],必须对其建模并进行估计补偿。文献[6]以捷联惯导与航位推算的位置之差作为量测没计组合导航算法,由于直接将捷联惯导姿态矩阵作为航位推算的姿态矩阵,必将导致航位推算误差会随着惯导姿态误差的发散而较快增大,从而也影响了最终的组合导航精度。为此,本文利用里程计输出与捷联惯导中陀螺仪输出独立进行姿态解算,在一定程度上减缓航位推算姿态误差的发散程度;对里程计刻度系数误差进行建模并列人系统状态,引入载车姿态信息作为组合导航量测之一,以提高姿态误差的估计补
偿效果;采用Sage-Husa自适应滤波设计捷联惯导/里程计组合定位定向算法,以增强系统对外界环境和载车机动等的鲁棒性。
l基于捷联惯导/里程计的车载定位定向原理
在车载定位定向系统中,采用东一北一天地理坐标系作为导航坐标系。捷联惯导与里程计均捷联安装在载车上。其中里程计安装在载车的前轮轴上。因为后轮作为驱动轮,容易出现打滑或滑行而引起较大误差;而前轮是从动轮,出现上述现象的情况相对较少[7】.捷联惯导经过导航解算输出载车的姿态、位
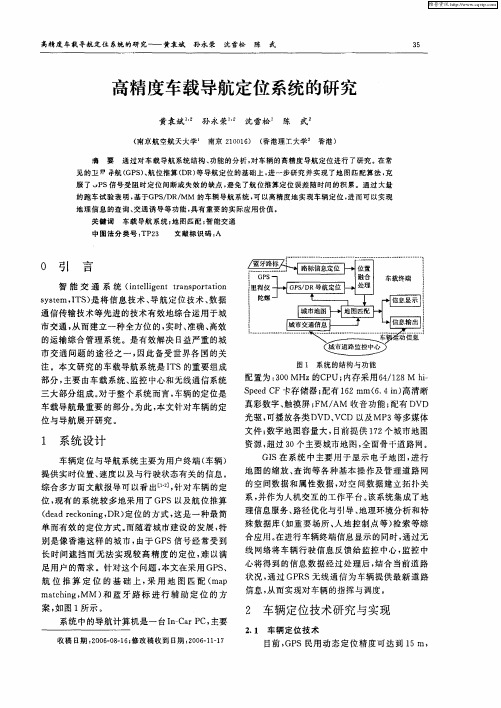
万方数据·2502·计算机测量与控制第19卷置和速度信息,里程计采用路程增量输出。首先,利用里程计与捷联惯导中的陀螺仪构成航位推算系统,经过解算获得载车的姿态、位置和速度信息;然后,将捷联惯导输出的姿态、位置与航位推箅系统输出的对应信息相减作为量测,送入组合定位定向滤波器(采用Sage-Husa自适应滤波)进行滤波;经过滤波计算,获得系统状态(即捷联惯导与航位推算系统误差)的最优估计值;最后,利用所获得的系统误差估计值实时对捷联惯导和航位推算系统进行误差校正,并将校正后的捷联惯导系统输出作为整个车载定位定向系统的输出。因此,基于捷联惯导/里程计的车载定位定向原理方案如图1所示。广—————T姿奈、位置、速度定付定目信息输『{:捷联惯导II——坛习姿态|f、,骨
误并按lFS{lge_删usafI辽成滤波器
i统潢差仍汁值
图1基于捷联惯导/里程计的车载定位定向原理框图
2航位推算系统的误差模型本文采用间接法滤波,即选取系统误差作为组合定位定向滤波器的状态,为此需要对捷联惯导和航位推算系统进行误差分析与建模。捷联惯导的误差方程在很多文献中已有研究,这里就不作赘述了,文中只给出航位推算系统的误差方程。2.1航位推算系统的误差源及其模型在航位推算系统中,除了初始误差,里程计和陀螺仪误差是最主要的误差源。其中,里程计的误差主要为刻度系数误差,通常可考虑为随机常值,即艿R一0(1)
陀螺仪误差经标定补偿后,主要还剩下一些无法标定的随机漂移,主要有随机常值漂移和自噪声。因此,陀螺仪的误差可表示为:ei一“+%(i=工,Y,z)(2)
其中,i=。,Y,z表示分别沿载车坐标系的z、Y、z轴;%
为i轴上陀螺仪的白噪声;“为i轴上陀螺仪的随机常值误差,其满足eh一0(i=z,Y,z)(3)
2.2航位推算系统的误差方程在航位推算系统中,如果以捷联惯导姿态矩阵作为航位推算的姿态矩阵,则会导致航位推箅误差将随着捷联惯导姿态误差的发散而迅速增大。而捷联惯导姿态误差发散的重要原因之一是,惯导速度和位置误差随时间快速发散而引起位置速率嘁的计算存在较大误差。
由于里程计测量误差不随时间增长。而随路程增长,因此航位推算的速度和位置误差其发散速度要明显低于惯导。此时,如果利用航位推算获得的速度、位置信息并结合陀螺输出来进行航位推算姿态解算,可在一定程度上减缓姿态误差的发散速度,进而有效提高整个航位推算的精度,而具体解算方法则与捷联惯导姿态解箅相似。因此,只需以航位推算系统的输出信息及其误差来替代捷联惯导姿态误差方程中的对应物理量即可,则航位推算系统的姿态误差方程可表示为:妒D=M19D+M2铲D+眠Ⅸ+M4岛+M5wg(4)其中,伽=[‰,,I肼,≯DU]7,SP。=[乩o,毅。,赫D]7,Eb=k,%,e“]7,毗=[%,%,%]7。这里,虹,庐DⅣ,‰为航位推算沿东、北、天向的姿态误差角;3/-D,毅D,虢。为航位推算的纬、经、高度误差。类似于捷联惯导位置误差方程的推导方法,可获得航位推算系统的位置误差方程为:护D—M6伽+M7铲D+M8SK(5)上述矩阵M。,M2…M8的具体表达式可参见文献[7]。3捷联惯导/里程计组合定位定向算法为了设计获得捷联惯导/里程计组合定位定向算法,需要分别建立组合定位定向的状态方程和量测方程,并在此基础上采用适当的滤波算法进行滤波计算。3.1组合定位定向的状态方程由于采用间接法滤波,因此选取系统误差作为组合定位定向滤波器的状态。捷联惯导/里程计组合定位定向的系统误差主要包括:捷联惯导的数学平台姿态误差角托,“,如,速度误差加z,知。,跏u,位置误差乩,毅,虢,陀螺常值漂移£“,£钾,‰,加速度计常值误差v。,v妇,v。;航位推算的姿态误差角簪D£,‰。声DU,位置误差孔o,毅o,脯o。里程计刻度系数误差涨。即捷联惯导/里程计组合定位定向的系统状态x为:X一[九.“,丸,舳£,枷~,劬u,乩,毅,虢,ek,£b,‰,vk,v如,vh,声DE,≯W,≯聊,乩D.双D,胁D,涨]丁(6)于是,根据捷联惯导和航位推算系统的误差方程,并结合系统状态x,可列写出捷联惯导/里程计组合定位定向的状态方程为:文=FX+GW(7)其中,F为系统状态矩阵,G为系统噪声驱动阵,w为系统白噪声。这里,w=[%,%,%,%,%,%]丁’其中%,%,%为陀螺自噪声,t‰,%,%为加速度计自噪声。3.2组合定位定向的量测方程由于航位推算精度受到姿态矩阵精度的影响,为此除了位置信息再引人姿态信息作为组合定位定向的量测,这样能够有效提高航位推算姿态误差的可观测性和估计效果,从而提高航位推算的姿态精度和定位精度。因此,将捷联惯导的姿态、位置输出与航位推算系统的对应输出相减作为量测z,即Z=[豳一如,良一如,ys一扬,Ls—Lo,2s—b,hs—ho]7(8)这里,如,如,Ys分别为捷联惯导输出的载车航向、俯仰和滚动角;如,如,yD分别为航位推算输出的航向、俯仰和滚动角;Ls,As,hs为捷联惯导输出的纬、经、高度;LD,AD,hD为航位推算输出的纬、经、高度。设捷联惯导的航向、俯仰和滚动角误差分别为劫,留,村,航位推算的航向、俯仰和滚动角误差分别为却D,帮。,毋。,则根据式(8)可得:Z=[劬一劬D,田一田D,渺一毋D,乩’_乩D,毅一擞D,赫一蕊Dr(9)