现代控制理论 4-2 非奇异线性变换的不变特性
浙大控制考研-现代控制理论(浙大)第二章
1 A2t 2 2!
1 k
Aktk
)
b0
t 0 x(0) b0
x(t) (I At 1 A2t 2 1 Akt k )x(0)
2!
k
eAt I At 1 A2t 2 1 Akt k
2!
k
矩阵指数函数
Φ(t) 状态转移矩阵
x(t) eAtx(0) 描述了状态向量由初始状态x(0)向任意时 刻状态 x(t)转移的内在特性。
eAt I At 1 A2t 2 1 Akt k
2!
k
1)根据状态转移矩阵的定义求解:
eAt I At 1 A2t 2 1 Akt k
2!
k!
对所有有限的t值来说,这个无穷级数都是收敛的 。
求出的解不是解析形式,适合于计算机求解。
例:求解系统状态方程 解:
x1
x2
0 0
-11
6
-6 -11 5
试计算状态转移矩阵 eAt .
解: 1) 特征值
1 1
I A 6 -11 6 1 2 3 0
6 11 5
1 1,2 2,3 3
2) 计算特征向量:
1 1 1 p1 0, p2 2, p3 6
1 4 9
3) 构造变换阵P:
1 1 1 P 0 2 6
(A B)3 A3 B3 3A2B 3AB 2
(9) x Px Φ(t) P-1Φ(t)P P-1eAtP
证明:非奇异线性变换
x Px
n n非奇异矩阵 另一组状态变量
x Px
x P1AP x x(t) eP1AP x(0)
x Ax APx 新的系统矩阵 新的状态转移矩阵
Ax
eAt x(0) Φ(t)x(0)
现代控制理论中线性变换矩阵的构造方法
统在某一方面的特性 ,或者可以简化问题 的分析计算。因此 ,基底 的变换是系统状态分析方法中广泛采用 的一种手段 。所以 , 有必要研究一下常用非奇异线性变换矩阵 P的构造方法。
2 A矩 阵的约 当规范化
令 =P 则 : A:P Fq J
约 矩 求 首 把 为si标 = (,( ,, ] … 为 当 阵 的 法:先 一 化 mh 准 t [ d … ( 。 ,,, )2 ) )设 的 异 征 , 复 域 = (,( ,, 】 解 一 因 的 积 相特值在数将 [ d … )分 为 次 式 幂 )2 ) (
统 特 值 项 为 d(-)d(—) + + + 口 则 的 征 多 式 :eM =es = 口 … 口 。 t t l +
1
尸 c 。 ,, = 6 6, 一, 6 …
口
- : :
4 把系统化 为能观测标 准型
4 x: - 则 : : - pI 。 :P6, : P I , C -。能观测标准型为 : =A b ,Y= — X+ u
其 系 的 征 多 式 :es A=e 一) 口 十 十1 口 则 中 统 特 值 项 为 d(-)d( = 一 a+0 : t l t + 8 。
f , l口 PJ :
I : :
0 …
维普资讯
一 :
齐 齐 哈 尔 大 学 学 报
曹伟 ,乔金 杰
(. 1 齐齐哈尔大学计算机与控制工程学院 ,黑龙江 齐齐哈尔 110 ; 606 2 . 哈尔大学经济管理学院 , 齐齐 黑龙江 齐齐哈尔 110 ) 606
《现代控制理论》第三版课件_第4章
e λ1t z10 λ2t e z 20 z (t ) = λnt e z n0
ˆ C11 ˆ C 21 y (t ) = ˆ C m1 ˆ C12 ˆ C
λt ˆ C1n e 1 z10 ˆ e λ2t z 20 C2n ˆ e λnt z n 0 C mn
J = diag{λ1 , λ2 , , λn }
[ p1
p2
λ1 0 pn ] 0
0 λ2 0
0 0 = A [p 1 λn
p2 pn ]
J1 0 J = P −1 AP = 0
0 J2 0
λ j 0 0 0
零空间(核空间)
n
4-5 状态向量的线性变换
x = Ax + Bu y = Cx + Du
x = Pz
ˆ ˆ = P −1 APz + P −1 Bu = Az + Bu z ˆ y = CPz + Du = Cz + Du
状态向量的线性变换不影响系统的状态能控 性、能观性和传递函数阵,也不影响系统矩 阵的特征值和系统平衡状态的稳定性。
[
p j 2 p jq
]
( λ j I − A) p j1 = 0
Pj = p j1
[
p j2
p jq
]
( λ j I − A) p j 2 = − p j1 ( λ j I − A) p j 3 = − p j 2 ( λ j I − A) p jq = − p j ( q −1)
( λ j I − A) p j1 = 0 ( λ j I − A) p j 2 = − p j1 ( λ j I − A) p j 3 = − p j 2
现代控制理论:4.5g 线性系统的结构分解和零极点相消
能观性分解(8/10)—例4-16
例4-16 试求如下系统的能观子系统:
0 0 -1 1 x 1 0 - 3x 1u
0 1 - 3 0
y [0 1 - 2]x
列3=列1-2列2
解 由于
C
0 1 - 2
rank QO
rank
CA
rank
1
-2
3
2
3
CA2
- 2 3 - 4
故该系统为状态不完全能观且能观部分的维数为2。
能控性分解(1/18)—能控性分解定理
4.5.1 能控性分解
对状态不完全能控的线性定常连续系统,存在如下能控性结 构分解定理。
定理4-17 若线性定常连续系统
x Ax Bu
y
Cx
状态不完全能控,其能控性矩阵的秩为
rankQc=rank[B AB … An-1B]=nc<n 则存在非奇异线性变换x=Pc x ,使得状态空间模型可变换成
4.5 线性系统的结构分解和零极点相消
一个系统状态不完全能控,意味着系统的部分状态不能控, 但也存在部分状态能控。 ➢ 到底哪一部分状态能控,哪一部分状态不能控的问题,对 于控制系统的分析、设计和综合,显然是至关重要的。 ➢ 由前面的结论已知,系统的非奇异线性变换不改变能控 性,那么是否存在线性变换后将系统的状态变量中完全 能控的部分和完全不能控的部分分离开来? ➢ 对状态不完全能观的系统, ✓ 也存在类似的区分哪些状态能观,哪些状态不能观 的问题。
0 1 0
A~ Po1APo -1 - 2
0
1 0 -1
C~ CPo [1 0 0]
则能观子系统的状态方程为
1 B~ Po1B -1
0
现代控制理论四-控制系统稳定性
则 xe 0 为不稳定的。
例4-5 系统的状态方程为 x1 x2 x2 x1 x2
分析系统平衡状态的稳定性。
解 系统的平衡状态为 xe 0
选取Lyapunov函数:V ( x) x12 x22
显然它是正定的,即满足
V (x) 0 x 0 V (x) 0 x 0
数,并且满足:
1)V ( x)为正定; 2)V ( x) 为半负定;3)除了xe 0 平衡状态外, 还有V( x) 0 的点,但是不会在整条状态轨线上有 V ( x) 0
则 xe 0 为一致渐近稳定的。
如果 x ,V ( x) ,则V ( x) 是大范围一致渐近稳定的。
Lyapunov第二法是研究系统平衡状态稳定性的。
平衡状态—— 一般地,系统状态方程为 x f (x,t) ,其初始状态
为x(t0 )。系统的状态轨线 x(t)是随时间而变化的。当且仅当 x xe
(当 t≥t0 )则称 xe 为系统平衡。
xe如果不在坐标原点,可以通过非奇异线性变换,使 xe 0 ,
数,并且满足:
1)V ( x)为正定; 2)V ( x) 为半负定;
则 xe 0 为一致稳定的。
如果 x ,V ( x) ,则 xe 0是大范围一致稳定的。
(注:本定理只是比定理4-2少了第3个条件,不能保证 渐近稳定,只能保证一致稳定。)
因为 V ( x)≤0
则系统可能存在闭合曲线(极限环),在上面恒有 V( x) 0 ,则系
4.4 线性连续系统的稳定性
对线性时变系统,其相应的齐次状态方程为 x A(t)x
由第2章介绍的方法求出其解为 x(t) (t, t0 ) x(t0 )
《现代控制理论》课后习题答案2
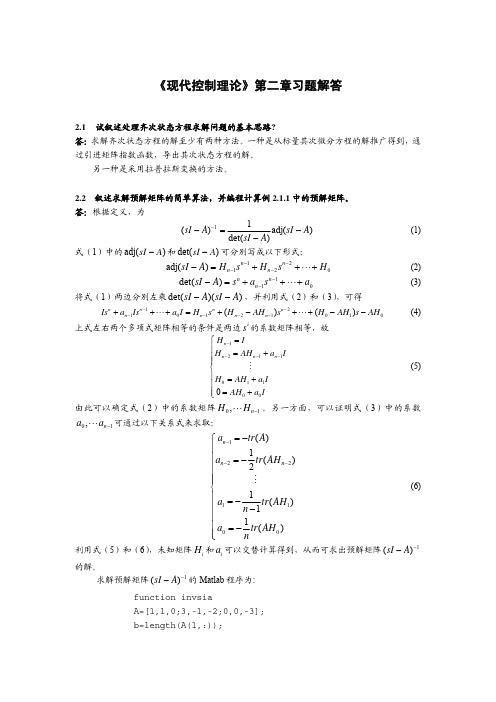
( sI − A) −1 =
1 adj( sI − A) det( sI − A)
(1)
式(1)中的 adj( sI − A) 和 det( sI − A) 可分别写成以下形式:
adj( sI − A) = H n −1s n −1 + H n − 2 s n − 2 + " + H 0 det( sI − A) = s + an −1s
故
Φ (t ) = α 0 (t ) I + α1 (t ) A + α 2 (t ) A2
⎡ −2tet + e 2t ⎢ = ⎢ −2(1 + t )et + 2e 2t ⎢ −2(2 + t )et + 4e 2t ⎣
(3t + 2)et − 2e 2t (3t + 5)et − 4e 2t (3t + 8)et − 8e 2t
n n −1
(2) (3) (4)
+ " + a0
,可得 将式(1)两边分别左乘 det( sI − A)( sI − A) ,并利用式(2)和(3)
Is n + an −1 Is n −1 + " + a0 I = H n −1s n + ( H n − 2 − AH n−1 ) s n − 2 + " + ( H 0 − AH1 )s − AH 0
e jt = a0 (t ) + a1 (t ) j , e − jt = a0 (t ) − a1 (t ) j
而
e jt = cos t + j sin t , e− jt = cos t − j sin t 因此, a0 (t ) = cos t , a1 (t ) = sin t 。由此得到状态转移矩阵 ⎡ cos t sin t ⎤ Φ (t ) = e At = a0 (0) I + a1 (t ) A = ⎢ ⎥ ⎣ − sin t cos t ⎦
现代控制理论 极点配置
− −
= [ − − A − ]
= [ − − + ( − )( )]
ഥ−
ഥ
ഥ )]
= [ − (
ഥ −
其中, = , 即 =
这说明对于任意给定的期望极点 ∗ ,∗ , ⋯ ,∗ ,都可以找到状态反馈矩阵
,
= 2
1 3
满秩,系统是完全能控的,可由状态反馈任意配置系统的闭环极点。
(2)闭环系统的期望特征多项式为 :
∗ = ( − 1 )( − 2 ) = 2 + 2 + 5
(3)设状态反馈阵为: =
− −
=
−
−2
4Hale Waihona Puke ,则状态反馈控制系统的特征多项式为:
二. 状态反馈极点可配置的条件
定理:线性定常系统
ሶ =A+B , 0 = , ≥0
=
可通过状态反馈 = − + 任意配置全部极点的充要条件是系统完全能控。
5.2
极点配置问题
证明:充分性(只讨论单输入单输出系统)
已知系统为完全能控,证明可任意配置极点。
即通过状态反馈必成立 − −
1. 利用非动态输出反馈 = − + ,不能任意地配置系统的全部极点。
以单输入单输出系统为例,设受控系统的传递函数为 (),则输出反馈系统的传递函
数为:
()
=
1 + ()
因此,闭环系统的根轨迹方程为: 1 + =
当从0到∞ 变化时,就得到了闭环系统的根轨迹。
5.2
极点配置问题
三.单输入单输出系统状态反馈极点配置的算法
现代控制理论-第二章 控制系统的状态空间描述
DgXu
2.2.1.由物理机理直接建立状态空间表达式: 例2.2.1 系统如图所示
L
R2
u
iL
R1
uc
选择状态变量:
x1 iL , x2 uC ,
13 中南大C diL 1 iL (u L ) C dt R1 dt duC diL L uC C R2 u dt dt
y(s) [C(sI A) B D]U (s)
1
1
得
9
G(s) C (sI A) B D
命题得证
中南大学信息学院自动化系
1
DgXu
例2.1.3
已知系统的状态空间描述为
x1 0 1 0 x1 0 x 0 1 1 x 1 u 2 2 x3 0 0 3 x3 1
28 中南大学信息学院自动化系
DgXu
故有(n-1) 个状态方程:
对xl求导数且考虑式 (2.3.12),经整理有:
则式 (2.3.12) bn=0 时的动态方程为:
(2.3.16)
式中:
29 中南大学信息学院自动化系
DgXu
30 中南大学信息学院自动化系
DgXu
3)
化输入-输出描述为状态空间描述
11 中南大学信息学院自动化系
DgXu
2.3. 线性定常连续系统状态空间表达式的建立
建立状态空间表达式的方法主要有两种: 一是直接根据系统的机理建立相应的微分方程或差分方 程,继而选择有关的物理量作为状态变量,从而导出其状态 空间表达式; 二是由已知的系统其它数学模型经过转化而得到状态达 式。由于微分方程和传递函数是描述线性定常连续系统常用 的数学模型,故我们将介绍已知 n 阶系统微分方程或传递函 数时导出状态空间表达式的一般方法,以便建立统一的研究 理论,揭示系统内部固有的重要结构特性。
现代控制理论4稳定性
现代控制理论4稳定性4 稳定性分析4.1李氏稳定性分析(1)平衡状态设系统 [],x f x t = x —n 维状态向量。
f —n 维函数向量。
若存在状态向量ex ,对所有的t ,使得 []0ef x t ≡成立,则称ex 为系统的平衡状态。
例如系统1132122x x x x x x =-??=+-?解:有3个平衡点 100e x=,201e x=??-??,301e x=(2)稳定性分析1)李亚普诺夫意义下的稳定对于任选0ε>,都对应存在0(,)0t δε>的实数,当00(,)e x x t δε-≤时其解满足00(,,)x t t εΦ≤ 0t t ≤<∞则称平衡状态ex 为李亚普诺夫意义下的稳定,如果δ与t 无关,则称ex 是一致稳定2)渐近稳定由非0初始状态引起的自由运动是衰减的,当t →∞时, 0(,,)0et x t x Φ-=则ex 平衡点是渐近稳定的。
3)大范围稳定如果ex 稳定,而且对于所有的0x ,00(,,)0et x t x Φ-→,则称平衡状态是大范围渐近稳定的。
4)不稳定由初始状态引起的运动无论0ex x δ-≤,δ多么小,至少有一个状态超出任意指定的空间范围,则称平衡点ex 是不稳定的。
4.2李氏第一方法(1)线性定常系统的稳定判据:x Ax Bu =+ y Cx =系统稳定的充要条件是0SI A -=的特征根全位于S 左半面,输出稳定的充要条件是B A SI C S W 1)()(--=的极点全位于S 左半面,当存在零、极点对消情况时两者是不一致的。
101-=A ,11B ??=, []10C = 0)1()1(=+?-=-S S A SI 11S =-,21S =状态不全稳定,属于状态不稳系统,而输出为[]1)1)(1(111100101)()(1+=-+-=-+=-=-S S S S S S B A SI C S W 是输出稳定系统。
现代控制理论(第三章)
3 2 5 4 2 1 1 1 2 2 2 4 4 M B AB A B 1 1 2 2 4 4
rankM rankMMT 2 dim A 3
系统不可控!
EAST CHINA INSTITUTE OF TECHNOLOgy
多输出:
C CA dim A n rankN rank n 1 C A
条件满足即可, 不必写出所有的行!
nm n
阶可观测性矩阵
EAST CHINA INSTITUTE OF TECHNOLOgy
3.4* 离散时间系统的能控性与能观性
3.4.1 能控性矩阵 M 离散时间系统的状态方程如下: (1) 当系统为单输入系统时,式中 列矢量;G为系统矩阵 3.4.2 能观性矩阵N 离散时间系统的能观性,是从下述两个方程出发的。 (2) 式中, 为 维列矢量;C 为 输出矩阵,其余同式(6)。 ; 为标量控制作用.控制阵 为状态矢量 。 为 维
,在有限时间
。在这种情况下,称为状态的能达性。 驱动到 ,而不计较
3)在讨论能控性问题时,控制作用从理论上说是无约束的,其取值并非
唯一的,因为我们关心的只是它能否将 的轨迹如何。 2.线性连续时变系统的能控性定义 线性连续时变系统: 3.离散时间系统
这里只考虑单输入的n阶线性定常离散系统:
EAST CHINA INSTITUTE OF TECHNOLOgy
4
1 x
x1
u
2 x
5
x2
6
y
EAST CHINA INSTITUTE OF TECHNOLOgy
3.1 能控性的定义
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c⎡ 1
⎢ ⎢
s
−
λ1
y ( ) sI
−
A
−1 b
=
⎢ ⎢
⎢
⎢
tc ⎢
⎢⎣
1 s − λ2
O
1
⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎡α1 ⎢⎢α 2 ⎢M ⎢⎣α n
⎤ ⎥ ⎥ ⎥ ⎥ ⎦
=
⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
α1
s − λ1 α2
s − λ2 M αn
⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
=
⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
y = CPP−1(sI − A)−1PP−1B + D tc = C(sI − A)−1B + D = G(s)
A = P−1AP, B = P−1B, C = CP, D = D
系统可控性 不变!
e[ ] rank S′ = rank B AB A2B L An−1B [ a ] ( ) ( ) = rank P−1B P−1APP−1B P−1AP 2 P−1B L P−1AP n−1P−1B c[ ] = rank P−1B P−1AB P−1A2B L P−1An−1B y [ ] = rank P−1 B AB A2B L An−1B tc [ ] = rank B AB A2B L An−1B = rank S
a 可控、可观性、传递函数 不变! 不可控!
前页
c( ) sI − A −1b
返回
tcy =
⎡ ⎢ ⎢ ⎢
s
α01 − λ1 α2
⎢ ⎢ ⎢ ⎢
s
− λ2 M αn
⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
=
提取最小公分母
(s −1λ1) (s − λ11)(s − λ2 )L(s − λn
零极点对消
)
⎡
00
⎤
c系统可观 ⇔ c(sI-A)-1 不存在零极点对消/
1× n 列线性无关
y 系统可控可观 ⇔ c(sI-A)-1b 不存在零极点对消 tc 1×1 G(s) 传递函数不可约!
返回
单输入单输出
可控 u ⇒ x 令初态为零
⎧x& = Ax + bu
⎨ ⎩
y
=
cx
e sX (s) = AX (s)+ bU (s) ⇒ X (s) = (sI − A)−1bU (s) 前页
⇒ Y (s) = cX (s) = c(sI − A)−1bU (s)
4
⎧x& = Ax + bu
⎨ ⎩
y
=
cx
e向量动态方程的系统结构图 a 前页
cu(t) b
x& (t )
x(t )
y(t )
∫
c
tcy A
返回
P变换
⎧x& = Ax + bu
⎨ ⎩
y
=
cx
x = Px
⇒
⎧x& ⎨ ⎩y
= =
⎢ ⎢
α
2
(s
−
λ1
)(s
−
λ3
)L(s
−
λn
)
⎥ ⎥
⎢⎢⎣ααnn((ss−−λλ11))((ss−−MλλM22))LL((ss−−λλnn−−11))⎥⎥⎦
⎢⎣ s − λn ⎥⎦
6
可可控控性性
⎡λ1
⎢
A = P−1AP = ⎢ ⎢
⎢
e⎣
λλ21
O
⎤
⎡α1 ⎤
⎥ ⎥
b
=
P −1b
=
⎢⎢α 2
零极点 对消
e消去 s-λ1 ⇒ α1β1 = 0
aα1 = 0 β1 ≠ 0 不可控、可观
cβ1 = 0 α1 ≠ 0 可控、不可观
α1 = 0 β1 = 0 不可控、不可观
y 无零极点对消 可控、可观 tc 传递函数不可约
例:判断下列系统的可控、可观性。
e x&
=
⎡− 4 ⎢⎣ 1
5⎤ 0⎥⎦x
− 5⎤ 5 ⎥⎦
=
1
返回
例:判断下列系统的可控、可观性。
e x&
=
⎡− 4 ⎢⎣ 1
5⎤ 0⎥⎦x
+
⎡− 5⎤ ⎢⎣ 1 ⎥⎦u,
y = [1 -1]x + u
解:
aY(s)
U (s)
=
c(sI − A)−1b
=
(s
+
1
5)(s
−1)
[s
−1
1− s]⎢⎣⎡−15⎥⎦⎤
c可控、不可观
=
− 6s +
不变!
tc ( ) sI−A −1b
可控、可观性
( ) ( ) c sI − A −1 c sI − A −1b
传递函数
5
可可控控性性
⎡λ1
⎢
A = P−1AP = ⎢ ⎢
⎢
e⎣
λ2
O
⎤
⎡α1 ⎤ α1 = 0
⎥ ⎥ ⎥
b
=
P −1b
=
⎢⎢α 2
⎥ ⎥
⎢M⎥
全零行
λn
⎥ ⎦
⎢⎣α
n
⎥ ⎦
a 可控、可观性、传递函数 不变! 不可控! 返回
2
A = P−1AP, B = P−1B, C = CP, D = D
系统可观测性 不变!
[ e ] ( ) ( ) rank V′ = rank CT AT CT AT 2 CT L AT C n−1 T
a ( ) ( ) = rank ⎢⎣⎡(CP)T P−1AP T (CP)T
c( ) ( ) ( ) L
5⎤ ⎥ ⎦
=
(s
(s −1) + 5)(s −
1)
⎡− 5⎤
⎢ ⎣
1
⎥ ⎦
tc 不可控!
rank[b
Ab]
=
rank
⎡− 5
⎢ ⎣
1
25 ⎤ − 5⎥⎦
=
1
判据 返回
10
例:判断下列系统的可控、可观性。
e x&
=
⎡− 4
⎢ ⎣
1
5⎤ 0⎥⎦x
+
⎡− 5⎤
⎢ ⎣
1
⎥u, ⎦
y = [1 -1]x + u
第四章 线性定常系统的线性变换
ae §1 状态空间表达式的线性变换 c§2 非奇异线性变换的不变特性 tcy §3 线性定常系统的结构分解
以P变换 ⎧x& = Ax + Bu 为例 ⎩⎨y = Cx + Du
x = Px
⇒
⎧x& ⎨ ⎩y
= =
P y
−1APx + P−1Bu = CPx + Du
e 对角标准形 a 约当标准形
−
λn
)
[0
L
β2 (s − λ1)(s − λ3 )L(s − λn ) βn (s − λ1 )(s − λ2 )L(s − λn−1 ) ]
可可观观性性 ⎡λ1
⎤
⎢ A = P−1AP = ⎢
λλ21
⎥ ⎥
⎢
O⎥
e⎢
⎣
λn
⎥ ⎦
可控、可观性 传递函数
不变!
a c = cP = [β1 β2 L βn ] 不可观!
ca =
α1β1
(s
−
λ2
)(s
−
λ3
)
+ α2β2 (s − λ1 )(s − λ3 ) (s − λ1)(s − λ2 )(s − λ3
+
)
α
3β
3
(s
−
λ1
)(s
−
λ2
)
tcy 何时消去 s-λ1?⇒α1β1 = 0
9
∑ ( ) Y (s)
U (s)
=
c
sI − A
−1 b
=
n i =1
αiβi s − λi
λ2
O
⎤
⎥
⎥
⎥
λn
⎥ ⎦
⎡α1 ⎤
b
=
P −1b
=
⎢⎢α 2
⎥ ⎥
⎢M⎥
前页 返回
⎢⎣α
n
⎥ ⎦
ac = cP = [β1 β2 L βn]
c可控、可观性 不变! ⎡ 1
传递函数
⎢ ⎢
s
−
λ1
y ( ) c sI − A −1b = [β1 β2 L βn ]⎢⎢ ⎢
tc ∑ Y(s)
U (s)
=
n i =1
αiβi s − λi
⎢ ⎢ ⎢⎣
1 s − λ2
⎤
O
1
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎡α1 ⎢⎢α 2 ⎢M ⎢⎣α n
⎤ ⎥ ⎥ ⎥ ⎥ ⎦
s − λn ⎥⎦
∑ ( ) Y (s)
U (s)
=
c
sI − A
−1 b
=
n i =1
αiβi s − λi
零极点 对消
前页
返回
e∑ 例如 3 αiβi = α1β1 + α2β2 + α3β3 i=1 s − λi s − λ1 s − λ2 s − λ3
1
A = P−1AP, B = P−1B, C = CP, D = D
系统传递矩阵 不变!
e G′(s) = C(sI − A)−1B + D a( ) = CP sI − P−1AP −1P−1B + D c ( ) = CP P−1sIP − P−1AP −1P−1B + D