斜坡补偿原理
斜坡补偿(3842)

图 4 占空比大于 50 %并带坡度补偿
图 5 - m = m2 时 ,电感电流波形
对于 BUC K 电路 , 补偿坡度是 V O/ L , 由于输 出电压恒定 , 所以补偿值便于计算并恒定; 对于 BOOST 电路 ,补偿坡度是 ( V IN - V O) / L , 由于输入 电压随电网变化 ,所以补偿值不恒定 ,这样对于固定 补偿网络 ,很多时候会发生过补偿或补偿不足 ,降低 了电路的性能并导致波形畸变 , 因此 BOOST 电路 通常不采用峰值电流控制而采用平均电流控制的模 式 ,来避免斜坡补偿 。 2. 2 减小尖峰值/ 平均值误差
(4) 计算晶振充电时的坡度 : V OSC = d ( V OSC) / TON = 2/ 12. 3 = 0. 17V/μs ;
(5) 计算斜坡补偿值 ,补偿比例 M 取 0. 75 , R1 = 1kΩ,计算 R2 的值 。
根据式 (2) 得 :
R2
=
R1
V OSC V m2 M
= 3. 8kΩ
图 15 采用射极跟随器减小晶振的输出阻抗
4. 2 参数选择
采用单端正激电路设计的 1000W 通信电源 ,以
UC3846 作为控制芯片 ,交流输入 165~275V ;输出
50V 、20A ; 工作频率 80k Hz ; 匝比 8/ 1 ( N P/ N S) ,检 测电阻 R SENSE = 0. 4Ω;输出电感 L = 40μH ;晶振电 容 CT = lnF ;死区时间 0. 145μs 。
入斜坡补偿有两种方法 , 一种是将斜坡补偿信号加 到电流检测信号中 , 如图 13 所示 ; 另一种是将斜坡 补偿信号从误差电压信号中减去 ,如图 14 所示 。
图 10 斜坡补偿电路
详解开关电源斜坡补偿的推导过程
详解开关电源斜坡补偿的推导过程
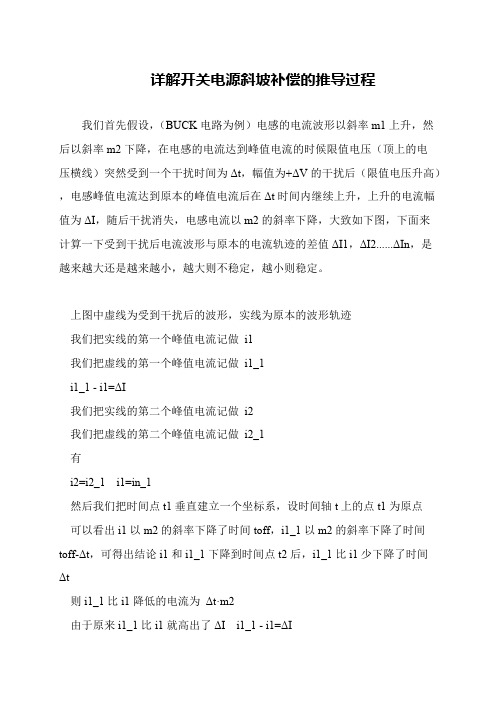
我们首先假设,(BUCK电路为例)电感的电流波形以斜率m1上升,然后以斜率m2下降,在电感的电流达到峰值电流的时候限值电压(顶上的电
压横线)突然受到一个干扰时间为Δt,幅值为+ΔV的干扰后(限值电压升高),电感峰值电流达到原本的峰值电流后在Δt时间内继续上升,上升的电流幅值为ΔI,随后干扰消失,电感电流以m2的斜率下降,大致如下图,下面来
计算一下受到干扰后电流波形与原本的电流轨迹的差值ΔI1,ΔI2......ΔIn,是
越来越大还是越来越小,越大则不稳定,越小则稳定。
上图中虚线为受到干扰后的波形,实线为原本的波形轨迹
我们把实线的第一个峰值电流记做i1
我们把虚线的第一个峰值电流记做i1_1
i1_1 - i1=ΔI
我们把实线的第二个峰值电流记做i2
我们把虚线的第二个峰值电流记做i2_1
有
i2=i2_1 i1=in_1
然后我们把时间点t1垂直建立一个坐标系,设时间轴t上的点t1为原点
可以看出i1以m2的斜率下降了时间toff,i1_1以m2的斜率下降了时间toff-Δt,可得出结论i1和i1_1下降到时间点t2后,i1_1比i1少下降了时间
Δt
则i1_1比i1降低的电流为Δt·m2
由于原来i1_1比i1就高出了ΔI i1_1 - i1=ΔI。
峰值电流模式斜坡补偿电路研究

71
定稿日期:2008—08—06
作者简介:夏泽中(1958一),男,湖北武汉人,博士,教授,研究
方向为电力电子与电力传动。
万方数据
第42卷第12期
2008年12月
电力电子技术
Power Electronics
V01.42
No.12
December,2008
该数量级的电阻取值显然不利于系统的稳定,因此 简单的RC补偿电路并不能达到满意的补偿效果。 (2)射极跟随器补偿电路 图5示出由射极跟随器构成的斜坡补偿电路及 其RAMP波形。R:和三极管组成斜坡补偿网络,CT
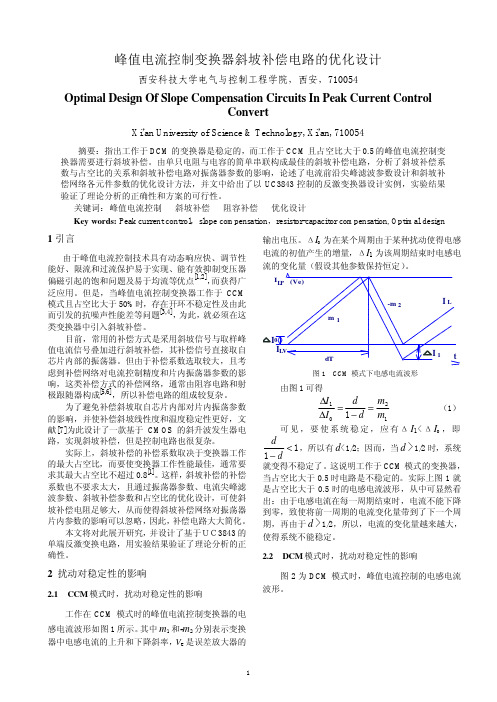
图1峰值电流模式控制全桥移相变换器的斜坡补偿原理图
2.2峰值电流控制电路稳定性分析 图2示出CCM模式下峰值电流控制变换器在 占空比D<0.5和D>0.5时的电感电流i。波形。可见,
当D<O.5时,A12<M。,AI周期性减小,系统是收敛 的,说明系统可以稳定;当D>0.5时,A12>AI,,AI周
(a)D<0.5,△如<AII (b)D>0.5,A/2>△,
引脚的波形通过三极管和R:耦合到RAMP上。通 常三极管的放大倍数大于100,引入射极跟随器后, 其补偿电路的等效电阻增加.减小了补偿电路对工 作频率的影响。
图2
CCM模式下五波形
△,
图5射极跟随器构成的斜坡补偿电路及波形
但因为三极管基射极间的导通门槛电压(通常 为0;7V)高于CT波形的最低电压(0.2V),使得耦 合到RAMP、引脚的补偿信号中有一段死区.如图5b 中所示的&时问段。从而不能实现占空比全程可 调,特别是当占空比很小时,会有一个跳跃的过程。 因此.需要对其补偿电路进行改进。改进的思路是抬 高CT耦合到三极管的基极电压,如图6a所示。通 过R,和R。的上拉分压作用,使得CT耦合到三极管 基极的信号高于其导通门槛电压,从而消除补偿到 RAMP引脚信号的死区,如图6b所示。
峰值电流控制模式中的分段线性斜坡补偿技术

(誊)。z(警)。:(半)。钏…-
又因为:踟=√单一。I。f孚1 、一, 可以得到腑:跏:跏=4;2:1
’
㈣
(9) (10)
厂——————1矿
设计V一变化范围为[y一△y,y+△明,A。、
&和凡的线性区分别为[yRL一△y】,yn+
△¨]、[VRL一△%,%+△K]和[vRH一△n,
A1、Az和A3的线性区范围,可知:
7n1
(1)
(注:m。、mz为上升、下降斜率,单位A/s。)同 理,可以证明经过n个周期后,△厶引起的电流误
差△L为:
她一弛×(署)“
由上式可以得即D<50%时,电流误差△L将逐 渐趋于0,故而系统稳定; 当mz>m,,即D>50%时,电流误差△J。将逐 渐放大,从而导致系统失控。电源的抗干扰性能差。 不能稳定工作。为了使当占空比大于50%时,系统 仍稳定,故引入斜率为的斜坡补偿信号。该方法就 是在控制电压vc上叠加斜坡补偿电压形成新的控 制电压输入到PWM比较器一端,与PwM比较器 另一端的电流反馈电压比较。图2是该种补偿方法 的原理示意图。其中是补偿斜坡电压的斜率。
1斜坡补偿的引入及原理
电流模式控制是一种固定时钟开启、峰值电流 关断的控制方法。因为峰值电感电流容易传感,而 且在逻辑上与平均电感电流大小变化相一致。但 是,峰值电感电流的大小不能与平均电感电流大小 一一对应,因此在占空比不同的情况下,相同的峰值 电感电流的大小可以对应不同的平均电感电流大 小。而平均电感电流大小才是唯一决定输出电压大 小的因素。若要电感的峰值电流与其平均电流一一 对应,从而唯一决定输出电压,则需要对电感的峰值 电流做进一步的处理,并需注意当占空比D大于 50%时开环不稳定(如图1),其存在难以校正的峰 值电流与平均电流的误差;容易发生次谐波振荡。 故在峰值电流模控制的PWM模式中引入了斜坡补 偿信号o]。使输入到PWM比较器的合成波形信号
斜坡补偿电路的选择和参数优化设计(0228_
当占空比大于 0.5 时电路是不稳定的。实际上图 1 就
是占空比大于 0.5 时的电感电流波形,从中可显然看
出:由于电感电流在每一周期结束时,电流不能下降
到零,致使将前一周期的电流变化量带到了下一个周
期,再由于 d >1/2,所以,电流的变化量越来越大,
使得系统不能稳定。
2.2 DCM 模式时,扰动对稳定性的影响
极跟随器,使补偿网络的等效电阻增加,从而减小补
偿网络对工作频率的影响,如图 5(c)所示,但这增加 了电路的复杂程度。实际上,通过合理选择振荡器参
2
数、电流前沿滤波参数和最大占空比的合理选择,应 用简单的阻容补偿网络也可达到满意的补偿效果。下 面就对阻容补偿网络进行深入研究。
R2
C1 CT RT
UC3843
当接入电阻或阻容补偿网络时,定时电容的充电
电路如图 6(b )所示,则电容 CT 由某下门限电压VTL
充电至某上门限电压VTH 经历的时间 TC2 为
TC2
=
ART CT
ln
5A − VTL 5A −VTH
(6)
其中 A = (R1 + R2 ) (R1 + R2 + RT ) 。
比较式(5)与式(6)可以看出:当 R1 + R2 >> RT
RT 对定时电容 CT 充电,CT 充到一定电压时再通过内
部的电流源放电,CT 上的波形如图 5(d)所示。根据如
图 6(a)所示电路,可得
RT CT
∂VC ∂t
+ VC
=5
(4)
由图 5(d)所示的波形可知:与充电时间相比,放
电时间短得多(当 RT>5 KΩ时)[1],因此,电容的充电
一种适用于高频电流模式转换器的斜坡补偿电路的设计与实现

电子元件及应用
2 适 用 于 高 频 电流 模 式 转 换 器 的 斜 坡 补 偿
电路 的 实 现
本文 设计 的斜坡 电路 如 图3 示 ,斜 坡 补偿 电 所
路包 括 电流 源,,电容 C ,电阻 ,开 关V T , 2 : T ,V 。
VT和反 相 器 ,这种 简 单 的结 构 没 有加 法 器 的 内 4
可 以看到 .一个 周 期后扰 动 电流变 为 : A 1△ I ・ =
m l
整个 电路 工 作 原 理 如 下 :逻辑 单元 产 生 一 个 充 放
电 的脉 冲来 控 制开 关V , T 的开关 ,从 而控 制 电 容 的 充放 电 。当开关V T是关 闭 时 ,电流源, 电容C充 对
n 周期 后 个
=
【J
( 2 )
电。 此 时A点 电压 线 性 增加 ,当A 电压 超 过 点
当』小 于05 ,此 时m 大 于 ,所 以经 过 D .时 个
电子 元件及应用
d i 0 9 9 .s .5 3 4 9 . 1 .20 3 o: . 6 /i n1 6 - 7 52 20 .1 1 3 js 0 )
一
种适用于高频电流模式转换器 的 斜坡补偿 电路 的设计 与实现
罗 小勇 ,毕 长红 ,文 皓
( 电子 科技 大 学 电子 薄膜 与 集成 器件 国 家重点 实验 室 ,四川 成都 6 0 5 ) 10 4
1 斜 坡 补 偿
11 斜 坡补偿 的 必要 性 .
峰值 电流 模 式 P WM开关 电 源 工 作 在C M模 式 C
下 且 占空 比 ( )大 于 05 ,系 统 存 在 稳 定 性 问 D .时
活学活用PWM控制器之斜坡补偿方法科普
活学活用PWM控制器之斜坡补偿方法科普
PWM控制器作为一种非常常见的重要电子元件,在中小功率开关电源
及消费类电子产品的电路系统设计中应用广泛。
本文将会针对PWM控制器
的斜坡补偿方法进行简单介绍和科普,希望能够对正在进行电子技术学习的
爱好者和初学者带来一定的帮助。
在一些中小功率开关电源模块的研制过程中,很多工程师都需要面对一个
问题,那就是在采用了电流型PWM控制器的电路系统中,会出现输出电压
正比于输出电流平均值而不是正比于峰值电流的情况。
众所周知,功率开关
管的峰值电流由PWM控制器保持恒定控制,当输入电压减小时,为了使电
流恒定,占空比将调节为D2,这时平均电流将上升为I2,输出电压也将上升。
在电流型控制器件的调节下,仅有输出电压能够得到控制。
那幺,采用斜坡补偿的方式可以解决电流型PWM控制器的这一应用弊端吗?答案是肯定的。
首先来看斜坡补偿的技术原理。
为了维持一个恒定的平
均电流(输出电压),要求有一个与占空比无关的电流波形补偿斜坡,当(NsPNp)Rs(m2P2)=m成立时,输出电感平均电流与Ton无关,则保持
了输出电压恒定。
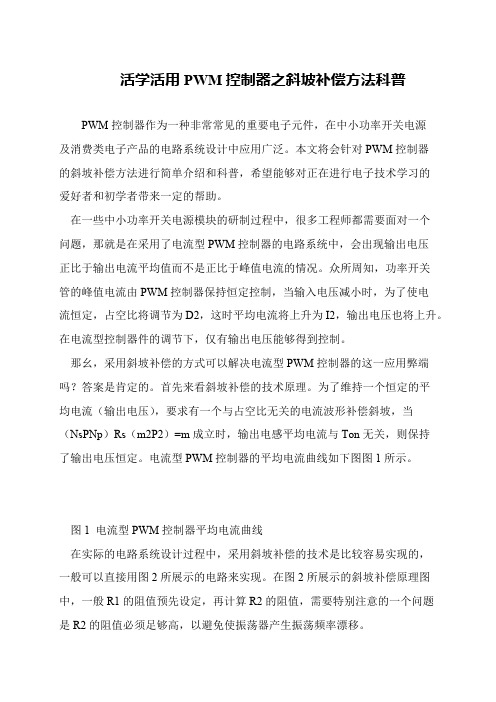
电流型PWM控制器的平均电流曲线如下图图1所示。
图1 电流型PWM控制器平均电流曲线
在实际的电路系统设计过程中,采用斜坡补偿的技术是比较容易实现的,
一般可以直接用图2所展示的电路来实现。
在图2所展示的斜坡补偿原理图中,一般R1的阻值预先设定,再计算R2的阻值,需要特别注意的一个问题
是R2的阻值必须足够高,以避免使振荡器产生振荡频率漂移。
关电源中斜坡补偿电路的分析与设计[1]
![关电源中斜坡补偿电路的分析与设计[1]](https://img.taocdn.com/s3/m/55afd8323968011ca300919a.png)
路, 不仅实现了内 部同步补偿, 而且能随占 空比变化自 动调节补偿量。 电路分析和仿真结果表明, 路能弥补传统电流模式的 该电 不足
有效地稳定开关电源的输出电压 关健词 开关电源,电流模式,斜坡补偿,占空比
1 .引言 开关电源是利用现代电力电子技术, 控制开关晶体管 的导通和关断的时间比率, 维持输出电压稳定的一种电源, 它和线性电源相比, 具有效率高、功率密度高、 可以 实现 和 输人电网的电 气隔离等优点, 被誉为 离效节能电 源M 目 前开关电源已经应用到了 各个领域, 尤其在大功率应用 的场合,开关电源具有明显的优势。 开关电源一般由脉冲宽度控制( ) 、 P I 功率开关管、 WM C 整流 二极管和L 滤 路构成。 小功率开 源中, C 波电 在中 关电 功率开 关管可以集成在PM W 控制I C内。 开关电源按反馈方 式分为电压模式和电流模式。电流模式开关电源因其突出 的优点而得到了快速的发展和广泛的 应用。 但是电流模式 的 结构决定了它存在两个缺点: 恒定峰值电流而非恒定平 均电 流引起的系统开环不稳定:占 空比大于 5% 0 时系统的 开环不稳定[ 2 1 本文旨 在从原理上分析传统电流模式的 缺陷及改进方 案,之后分析一个实用的斜坡补偿电路。
m,
波电 一 因 反 路的 可以 简 r 路的 半。 此 馈电 设计 大幅 化 n
④ 改善了负载 调整率。 在电流 模式中, 误差放大器 的带宽更大, 因而负载调整率更好。 3 .电流模式的缺点 3 恒定峰值电流引起的电感平均电流不恒定。 . 1
电流模式的实质是使电感平均电流跟随误差放大器输
图a 电感电流扰动被放大
I= II ( _ I d . g . 一 - 2 ) _ 一 - m t
2 产 2