无刷直流电机仿真
基于永磁同步电机的无刷直流电机建模仿真
3ቤተ መጻሕፍቲ ባይዱ
1 0 0 0 7 2;
河南 柴油机 重 工有 限责任公 司 技 术 中心 , 河南 洛阳 4 7 1 0 0 3)
摘
要 :以无刷直流电机的 内部结构和数学模型为基础 , 提 出一种基 于 M A T L A B / S i m u l i n k模块库中永磁
同步 电机 ( P M S M) 模块 的无刷 直流 电机 ( B L D C M) 建模 与仿 真新方 法。在 MA T L A B / S i m u l i n k中, 通过建 立独 立功能模块 , 并结 合 S i m u l i n k模 块 库下 P M S M 模 块 和 通 用 电桥 模 块 等 , 对 该 模 块 进行 有 机 整 合 , 搭建 出 B L D C M 系统仿真模 型。该模 型采用 双闭环控 制 , 外 环为速度 环 , 采用 P I 控制 , 以稳定 转速和抗 负载扰 动 ; 内 环为电流环 , 以稳定 电流 。仿真结果证 明, 采用 P MS M仿 真 B L D C M, 在建模 过程 中具有简 洁高效且模 型更加 精确 的优 点 , 此模型 为改进其他控制算法提供 了建模仿 真基础 。
s y n c h r o n o u s m o t o r ( P MS M) w a s p r o p o s e d .I n M A T L A B / S i m u l i n k ,t h e i s o l a t e d f u n c t i o n a l b l o c k s c o m b i n e d w i t h
me t h o d f o r mo d e l i n g a n d s i mu l a t i o n o f B L DC M i n MA T L AB / S i mu l i n k mo d u l e l i b r a r y o f p e r ma n e n t ma g n e t
永磁无刷直流电机的Simulink仿真

永磁无刷直流电机的Simulink仿真 对磁悬浮飞轮用无刷直流电机系统进行建模,仿真得到系统工作时各种参数、数据变化趋势和实验结果,能够有效地指导和验证控制系统的设计。
本书采用Mathworks公司的MATLAB作为仿真工具,其中的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。
使用其中的S-Function模块,结合编写C MEX S-FUNCTION,结合Simulink内含的丰富的数学运算逻辑模块和电力电子模块,能够准确地构造出磁悬浮飞轮用无刷直流电机及其控制模型。
在Simulink中对无刷直流电机仿真建模,国内外已进行了广泛的研究。
电机绕组反电动势波形可采用FFT法和有限元法实现,尽管这种方法得到的反电动势波形比较精确,但结合控制系统仿真时会极大地影响仿真速度。
此外,可以根据能够反映转子位置变化的绕组电感模块来获得反电动势波形,但如果永磁无刷直流电机的相电感极小,转子位置变化引起的电感变化量可忽略,那么该方法对小电枢电感的永磁无刷直流电机的建模并不适用;也可以使用分段线性法实现梯形波反电动势,并采取一些改进的仿真方法实现电机控制系统模型。
但在这些文献中,电机的换相是基于电流滞环控制的,需要三个电流互感器测量三相电流,具体实现时成本较高,开关噪声较大。
另外,在永磁无刷直流电机系统仿真时,应体现出脉宽调制(PWM)的作用。
从仿真结果来看,上述模型基本上还是属于模拟控制系统。
以上这些模型与目前永磁无刷直流电机控制普遍采用的基于数字信号处理器(DSP)的转速、电流双闭环数字控制系统不符合。
本文中系统模型根据实际磁悬浮飞轮用无刷直流电机DSP数字控制系统构建。
实际系统采用TI公司的DSP TMS320LF2407作为主控制器,IR2130作为三相逆变桥的驱动芯片,MOSFET管IRF3710组成三相逆变桥,对直流电源输出的母线电流进行采样,DSP输出6路脉宽调制PWM信号对电机的相电流和转速进行控制。
无刷直流电机控制系统的仿真与分析
c a l c u l a t i o n r e s u l t wa s a c c u r a t e , a n d t h e r e s u l t s we r e c o n s i s t e n t wi t h t h e t h e o r e t i c a l a n a l y s i s . Th e b u i l d i n g o f t h e s i mu l a —
Ab s t r a c t :Us i n g ma t h e ma t i c a l a n a l y s i s s o f t wa r e e f f e c t i v e l y i n t h e d e s i g n o f BI DC M c o n t r o l s y s t e m c a n a c c e l e r a t e t he d e — s i g n p r o c e s s . A BI DCM c o n t r o I s y s t e m wa s r e s e a r c h e d a n d a n a l y z e d u s i n g S a b e r s o f t wa r e . Th e p o s i t i o n d e t e c t i o n s e n s o r 。
t i o n s y s t e m p r o v i d e d a n e f f e c t i v e l y d e s i g n t o o l f o r BLDCM c o n t r o l s y s t e ms .
Ke y wo r d s :B I J) CM ;p o s i t i o n d e t e c t i o n s e n s o r ;e l e c t r o n i c c o mm u t a t o r s ;t h r e e — p h a s e i n v e r t e r c i r c u i t s
无刷直流电机模糊PI控制系统建模与仿真
无刷直流电机模糊PI控制系统建模与仿真摘要:从无刷直流电机(bldcm)的工作原理和结构出发,在分析了bldcm数学模型的基础上,采用模块化方法,在matlab/simulink 中建立了bldcm 转速、电流双闭环控制系统模型。
利用该模型进行了电机动静态性能的仿真研究,仿真结果与理论分析一致,表明该方法建立的bldcm控制系统仿真模型合理、有效。
该模型简单、直观、参数易于修改和替换,可方便地用于其他控制算法仿真研究。
关键词:无刷直流电机;matlab/simulink;双闭环控制系统模型;仿真模型随着新型永磁材料、自动控制技术、电力电子技术以及电子技术的迅速发展,无刷直流电机(bldcm)也随之发展起来并已成熟为一种新型的机电一体化设备,它是现代工业设备中重要的运动部件。
无刷直流电机采用电子换相器替代直流电机的机械换向器,实现直流到交流的逆变,采用位置传感器控制绕组电流的切换,既保持了直流电机的良好调速特性,又具有交流电机结构简单、运行可靠、维护方便的特点。
bldcm以体积小、速度高、可靠性好等优点广泛地应用于航空航天、机器人、电动汽车、仪器仪表、家用电器以及数控装置等领域[1]。
近年来,无刷直流电机的应用领域不断扩大,其控制系统的要求也随之越来越高。
无刷直流电机控制系统设计的过程中,为了缩短设计周期、降低研究成本和风险,通常先采用计算机仿真技术,建立无刷直流电机控制系统的仿真模型,分析电机转速、转矩等参数变化情况,研究整个电机系统的各类定量关系, 提取设计、分析和调试电机及其驱动系统所需数据,施加不同的控制算法以寻求最佳参数,有效地节省控制系统设计时间,加快了实际系统设计和调试的进程[2]。
1无刷直流电机的数学模型由于无刷直流电机的气隙磁场、反电动势以及电流是非正弦的,因此,采用直、交轴坐标变换已不是有效的分析方法。
而在分析和仿真bldcm控制系统时,直接利用电机原有的相变量来建立数学模型却比较方便,又能获得较准确的结果。
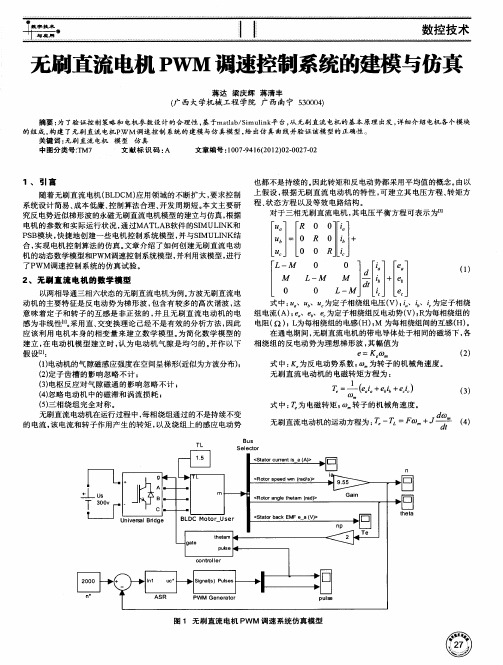
无刷直流电机PWM调速控制系统的建模与仿真
数 控 技 术
30 00
厂
2 0 50 2 0 0 010 5 0
,- . \ .
i
弓
5
J
蜱 lo O0
50 0
0 0
f f l
0. O1 0. 2 O 0. 3 0 00 .4 0. 5 0
II啊 - I_— _ 一 帅 刚 . I 一 . 啪- - I I I . - I洲 I _
2、无 捌 直 流 电机 的 数 学 模 型
以两 相 导 通 三 相 六状 态 的 无 刷 直流 电机 为 例 。 波 无 刷直 流 电 方 动机的主要特征是反 电动势为梯形波 , 包含有 较多 的高 次谐 波 , 这 意 味 着 定 子 和 转 子 的 互 感 是 非 正 弦 的 , 且 无 刷 直 流 电 动 机 的 电 并 感 为非线性【 采用 直、 l 1 。 交变换理论 己经不是有 效的分析方法 , 因此 应 该 利 用 电机 本 身 的 相 变 量 来 建 立 数 学 模 型 。 简 化 数 学 模 型 的 为 建立 , 电动 机模型建立 时 , 在 认为 电动机 气隙 是均匀的 。 并作 以下 假设【. 2 J () 1电动机 的气 隙磁感应强度在空 间呈梯形( 近似为方波分布) ; () 子齿槽的影 响忽 略不计 ; 2定 () 3 电枢 反 应 对 气 隙磁 通 的 影 响 忽 略 不 计 ; () 略 电 动 机 中 的磁 滞 和 涡 流 损 耗 ; 4忽 () 相 绕 组 完 全 对 称 。 5三 无刷直流 电动机在运行过程 中, 每相绕组通过的不是持续不变 的 电流 , 电流和转子作用产生 的转 矩 , 该 以及绕组上 的感 应电动 势
- - 一J - 一
0. 3 0 0. 4 0 0. 5 0
基于Proteus的直流无刷电机控制仿真

江苏科技大学本科毕业设计(论文)学院机电与汽车工程专业机械电子工程学生姓名李佳男班级学号 1045523218指导教师张鹏二零一四年五月江苏科技大学本科毕业论文基于Proteus的直流无刷电机控制仿真Simulation of brushless dc motor control based on the Proteus中文摘要直流无刷电动机是在有刷直流电动机的基础上发展起来的。
目前为止,虽然在传动应用领域当中占据主导的地位是各种交流电动机以及直流电动机,但是直流无刷电动机正在迅猛发展,日益受到人们广泛的关注。
BLDC电机具有直流电机方便调速的优点,但它没有机械换向的种种问题,同时扩大了调速的范围。
此外还有很多有优点,比如噪音比较低,效率高以及转矩波动较小,具有重要的研究意义。
本文在学习Proteus仿真软件的基础上,利用dsPIC33FJ12MC202单片机进行了直流无刷电机的控制研究,实现了仿真的硬件电路及单片机程序的仿真。
通过MPLAB软件对代码进行编写和调试,并且结合Proteus软件的硬件仿真。
最终得到实验结果。
以此为基础,通过程序实现了开环控制、PID控制、门限值控制等不同方案的设计;通过进行这些比较,得出开环控制难以获得较好的控制效果,而PID控制与门限值控制相比PID控制的灵活性及控制精度更高。
关键词:直流无刷电机;单片机;Proteus;仿真AbstractBrushless DC motor is based on the development of the brush DC motor . So far, although the transmission occupy the dominant position of application fields are various ac motor and dc motor, brushless dc motor is growing rapidly, however, is becoming more and more attention by people. BLDC motor has the advantages of convenient dc motor speed control motors, but it has no problems of mechanical commutation, at the same time expanding the scope of speed control. There are a lot of advantages , such as low noise, high efficiency and torque ripple is lesser, have important research significance. In this paper, based on the study of Proteus simulation software, using dsPIC33FJ12MC202 single-chip microcomputer for the study of brushless dc motor control . Realize the simulation of the hardware circuit and program. Through MPLAB software to write and debug code, and the combination of Proteus software hardware simulation .Finally the experimental results are obtained. On this basis, through the application implements open loop control and PID control, threshold control, different schemes of design; Through the comparison, it is concluded that open loop control is difficult to achieve good control effect, and compared with the threshold control PID control, PID control more flexibility and higher control precision.Keywords: Brushless DC moto r;single-chip microcomputer; Proteus; simulation目录第一章绪论 (1)1.1选题的目的和意义 (2)1.2国内直流无刷电机控制研究现状 (3)1.3本文主要研究内容 (3)第二章直流无刷电机的结构和工作原理 (4)2.1直流无刷电机的结构 (5)2.2直流无刷电机工作原理 (7)2.3直流无刷电机电机特性 (7)2.3.1 机械特性 (7)2.3.2 调速特性 (8)第三章硬件电路设计 (9)3.1 Proteus软件介绍 (9)3.2Proteus软件特点 (9)3.3 直流无刷电机的Proteus仿真模型 (10)3.4 Proteus中硬件电路搭建过程 (15)3.5 Proteus代码写入方法 (16)3.6 PCB布线过程 (16)3.6.1加载网络表及元件封装 (16)3.6.2规划电路板并布局 (17)3.6.3布线并调整 (18)3.6.4输出及制作PCB (21)第四章软件设计 (22)4.1 MPLAB软件介绍 (22)4.2单片机概述 (25)4.3直流无刷电机的控制策略 (26)4.3.1 控制策略选取考量 (27)4.3.2 PID控制策略简介 (27)4.4子程序设计及代码的通读与解释 (27)4.4.1初始化子程序 (27)4.4.2转子位置检测子程序 (29)4.4.3 PWM脉宽调制子程序 (30)4.4.4 ADC中断服务子程序 (32)4.4.5 PID算法子程序 (35)4.4.6延时服务子程序 (37)4.5主函数代码的通读与解释 (38)4.6开环控制与闭环控制的设计 (39)4.7门限控制代码的设计与解释 (40)第五章调试过程与结果分析 (41)5.1 MPLAB/PROTEUS调试过程及结果分析 (41)5.2 PID参数整定过程及结果分析 (42)5.3开环控制与闭环控制结果分析 (44)5.4 PID控制与门限值控制与结果分析 (46)第六章全文总结 (47)6.1论文总结 (48)6.2论文中存在的不足之处及改进方法 (48)致谢 (49)参考文献 (50)附录A系统原理总图及分图 (51)附录B开环控制源代码 (58)附录C闭环控制源代码 (69)第一章绪论1.1选题的目的和意义大家都知道,有刷直流电机驱动采用机械换向器的方法,方法非常的简单。
无刷直流电动机故障模式仿真及试验验证
摘要:无刷直流电动机具有结构简单、效率高、控制方便等优点,目前在国防军事、航空航天等领域都得到了广泛应用。
随着应用环境越来越复杂多样,造成无刷直流电动机故障的因素在增加。
鉴于此,深入研究了如何保证无刷直流电动机的高可靠、长时间运行。
从无刷直流电动机的故障模式出发,分析了各零部件的失效机理和故障表现,基于Matlab软件平台,建立了无刷直流电动机故障仿真模型,对不同故障特征进行了仿真研究,并进行了霍尔传感器断线故障试验。
由试验可知,在控制软件中加入无位置传感器控制子程序有助于提升无刷直流电动机的可靠性,延长其寿命。
关键词:无刷直流电动机;故障模式;仿真分析;故障试验0 引言无刷直流电动机是一个由电动机本体、电子换向电路以及转子位置传感器组成的系统,其中电子换向电路由逆变电路和控制电路组成。
无刷直流电动机工作的基本原理与有刷直流电动机不同,不需要电刷和换向片进行换相,而是通过转子位置传感器获得无刷直流电动机转子的位置信息,控制器通过对传送过来的转子位置信息进行处理,生成控制功率开关管通断的逻辑开关信号,控制电机的运转。
驱动控制电路由功率管、电阻、电容、集成芯片等元件组成,这些元件中任何一个出现故障,整个驱动控制电路基本上就无法正常工作。
也有极少数元件出现故障时整个驱动控制电路还能工作,但往往会使得电机性能下降。
因此,驱动控制电路是无刷直流电动机的可靠性薄弱环节,其中直线母线电容、IGBT对驱动控制电路可靠性的影响较大。
本文从无刷直流电动机的故障仿真出发,探讨霍尔元器件故障仿真与试验验证,研究故障模式下电动机转速、相电流变化特点。
1 无刷直流电动机故障仿真模型采用Matlab软件建立了无刷直流电动机故障仿真模型,如图1所示。
模型包括无刷直流电动机本体模块、逆变模块、PWM信号生成模块、转速电流双闭环控制电路和信号反馈电路。
仿真过程中无刷直流电动机本体采用的参数如表1所示。
逆变模块采用6个功率管组成三相逆变桥。
直流无刷电机控制系统的仿真研究
.
K e r s:b u h e sDC t r sm u ai n;m a e aia d l y wo d r s l s mo o ; i lt o h t m tc mo e l
0 引 言
直流无刷 电机 ( L M ) B DC 是功率半导体 和永磁 材 料一体化 的新 型电机 ,它 既具有直 流 电机优 良的调 速 性能 ,又具有交 流电机结构 简单 、易于控制 、运行 效 率高 、运行可靠 ,维 护方便 等优点 …。广泛应 用于伺
Absr c ta t: S m u a o o e ft eb u he sD C t rc n r ls se b s do A TLAB /S mu ik o sr ce i lt n m d l r s ls i o h mo o o to y t m a e n M i ln i c n tu td s a c r i n l zn emah ma ia o e fb u he sDC oo . nt i o to y tm ,P o to lri d pe nt e c o dngt a ay i gt te t l o h c m d l r s ls o m tr I sc n r l se h s Ic nr l a o t di e s h s e dl o d ah se e i u rn on o lri d pe ntec re t o p S m uai nc r er fe t eb u he sDC t r p e pa y tr ssc re t o n c t le sa o tdi u r n o . i lt u v l c st r s ls r h l o e h mo o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷直流电机仿真
学号:2110903073 姓名:方浩
1 无刷直流电机仿真模型
本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图
以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图
1.1
在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块
根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i,i,ab
i必须首先求得三相反电动势信号e,e,e,整个电动机本体模块的结果如下图cabc
3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块
和位置检测模块。
图3 电机本体模块
1. 反电势求取模块
本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图 4 反电势求取模块
Lookup Table模块的实质是通过查表构造反电动势波形,只要把360?内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
其中Ke为电机的反电动势系数。
具体的Lookup Table参数设置参照下表 1。
表 1 位置信号和单位反电动势的关系
0 60 120 180 240 300 360 位置
A 1 1 1 -1 -1 -1 1
B -1 -1 1 1 1 -1 -1
C 1 -1 -1 -1 1 1 1 2. 转矩计算模块
依据数学模型建立转矩计算模型如图5所示。
图5 转矩计算模块
3. 中性点求取模块
求出反电动势后根据电压平衡方程来求中性点电压,具体模块如图6所示。
图6 中性点求取模块
4.转子位置检测模块
图7 转子位置检测模块
1.2 PID
速度控制模块采用PID调节。
图 8 PID控制模块
1.3
参考电流模块的作用是根据电流幅值信号Is和位置信号pos求出三相参考电流。
参考电流模块的功能通过S函数实现。
图9 参考电流模块
1.4
电流滞环控制模块的作用是实现滞环电流控制,输入端l、2、3为三相实际电流,4、5、6为三相参考电流,输出为脉冲信号,滞环的环宽设为0-1之间。
模块结构框图如图10所示。
图 10 电流滞环控制模块
1.5
电压逆变器模块实现的是逆变器功能,输入为位置信号和电流滞环控制模块信号及电压逆变控制信号,输出为三相端电压,其中,可以通过编写S函数实现从转子位置信号得到六个MOSFET导通开关信号。
如图11所示。
图 11 电压逆变模块
三相的上桥臂控制信号与电流滞环控制模块得到的信号进行逻辑与运算,即
可得到控制开关的逻辑信号,如图11所示。
由于6个MOSFET只可能同时有两个导通,且两个管不能为同相,所以可选用二选一开关来得到三相端电压,如图12所示。
在本文设计的模型中,额定电压设为72V,则端电压的一半为36V。
图 12 开关功率管模块
2 仿真结果
仿真中,BLDCM参数设置为:额定转速n=120rad/s,定子相绕组电阻R=1.25 2欧姆,定子相绕组自感L=0.055H,互感M=0.003H,转动惯量为0.006kg.m,反电势系数为Ke=0.22V/rad/s。
极对数为n=1,72V直流电源供电。
p 待系统稳定后,在t=0.2s时,加负载2N.m。
可得到系统转速,转矩,相电流,相反电动势仿真曲线如图13-16所示。
图13 转速响应曲线
图14 转矩响应曲线图15 相电流波形
图16相反电动势波形
由仿真波形可以看出,在n=120rad/s参考转速下,系统响应快速且平稳相电流和反电动
势波形较为理想。
仿真结果证明了本文所提出的这种BLDCM仿真建模方法的有效性。
3 总结
在Matlab/Simulink仿真环境下,可以方便地建立BLDCM的仿真模型。
对于个别新的Simulink模块,应用S函数来实现,可以充分发挥Matlab编程的灵活性与Simulink的简单直观性,加速无刷直流电动机调速系统的开发。