非线性振动第1章 多尺度复习课程
合集下载
非线性振动第1章 等效
2
ε 2π ω 2 = ω02 − ∫ f (a cos ϕ , −ap0 sin ϕ ) cos ϕ dϕ πa 0
例1
mɺɺ + cx + kx + µx3 + γx5 = 0 x ɺ
1 ɺ (cx + kx + µx3 + γx5 ) = 0 m
ɺɺ + x
k ω = m
2 0
1 ɺ ɺ f ( x, x) = (cx + kx + µx3 + γx5 ) m
∫ε
0
[ 2 λ ( − a ω 0 sin ϕ ) + ω 2 a co s ϕ + ω 02 a co s ϕ − f ( a co s ϕ , − a ω 0 sin ϕ )] 2 d ϕ
2 2[2λ(−aω0 sin ϕ) + ω2a cosϕ − ω0 a cosϕ + ε f (a cosϕ, −aω0 sin ϕ)]
2π 2π
0
ψ 1 − sinψ = π 2 4 0
将解代入等价线性化方程
& & & x + λe x + ke x = F0 sin ωt
则得
F0 F0 = a= 2 3 2 ke − ω 2 ω0 + ε a − ω 2 4
幅频特性曲线
例3
用等价线性化法求如下非自治振动方程的定常解:
0
∫ caω0
0
1 − cos 2ϕ c dϕ = 2 2m
1 1 ω2 = [c(−aω0 sin ϕ) + ka cosϕ + µ(a cosϕ)3 + γ a(cosϕ)5 ]cosϕdϕ πa m ∫ 0 1 1 [ka cos2 ϕ + µa3 cos4 ϕ + γ a5 cos6 ϕ]dϕ = πa m ∫ 0 1 1 1 1 3 2 5 5 3 3 1 5 5 3 1 π = ⋅ 4 ⋅[ka ⋅ + µa ⋅ + γ a ⋅ ⋅ ] = (k + µa + γ a ) πa m 2 4 2 6 4 2 2 m 4 8
ε 2π ω 2 = ω02 − ∫ f (a cos ϕ , −ap0 sin ϕ ) cos ϕ dϕ πa 0
例1
mɺɺ + cx + kx + µx3 + γx5 = 0 x ɺ
1 ɺ (cx + kx + µx3 + γx5 ) = 0 m
ɺɺ + x
k ω = m
2 0
1 ɺ ɺ f ( x, x) = (cx + kx + µx3 + γx5 ) m
∫ε
0
[ 2 λ ( − a ω 0 sin ϕ ) + ω 2 a co s ϕ + ω 02 a co s ϕ − f ( a co s ϕ , − a ω 0 sin ϕ )] 2 d ϕ
2 2[2λ(−aω0 sin ϕ) + ω2a cosϕ − ω0 a cosϕ + ε f (a cosϕ, −aω0 sin ϕ)]
2π 2π
0
ψ 1 − sinψ = π 2 4 0
将解代入等价线性化方程
& & & x + λe x + ke x = F0 sin ωt
则得
F0 F0 = a= 2 3 2 ke − ω 2 ω0 + ε a − ω 2 4
幅频特性曲线
例3
用等价线性化法求如下非自治振动方程的定常解:
0
∫ caω0
0
1 − cos 2ϕ c dϕ = 2 2m
1 1 ω2 = [c(−aω0 sin ϕ) + ka cosϕ + µ(a cosϕ)3 + γ a(cosϕ)5 ]cosϕdϕ πa m ∫ 0 1 1 [ka cos2 ϕ + µa3 cos4 ϕ + γ a5 cos6 ϕ]dϕ = πa m ∫ 0 1 1 1 1 3 2 5 5 3 3 1 5 5 3 1 π = ⋅ 4 ⋅[ka ⋅ + µa ⋅ + γ a ⋅ ⋅ ] = (k + µa + γ a ) πa m 2 4 2 6 4 2 2 m 4 8
非线性振动第1章

在最近一个时期,科技工作者对许多非线性振动问题进行 了深入研究,在定量研究或是定性研究方面都提出了一些新的 有效的方法。特别是对混沌运动现象的揭示及对其开展的研究 工作,被认为是当今重大发现和重要成就之一。
近20多年来计算机技术的迅速发展,许多非线性振动问题 可以借助数值计算与数值模拟方法予以解决,这就使得非线性 振动问题的解法向前推进了一大步。
1 非线性振动的利用; 2 非线性振动的控制; 3 非线性振动的机理 。
目前在工程技术部门中,对许多非线性振动机理的研究 还很不深入。例如,对于一些在复杂非线性因素影响下的强 非线性多自由度系统的精确求解、复杂时变过程的特性、复 杂系统失稳的机理、复杂自激振动的起因和发展过程,一些 重大机械设备产生重大事故和发生破坏的原因,亚谐分叉解 的形成,混沌运动的产生等等。
工作温度:287.9o C
转速: 1490 r/min
额定功率:4000-13000 KW
高 度:8 m
价 格:9000 万元
2021/3/15
非线性振动第1章
10
沈阳鼓压缩机股份有限公司和我们的合作项目:4.8万千瓦 煤液化用大型气体离心压缩机
功率;48000 千瓦;转速:高速轴:8100 转/分, 低速轴:4700 转/分;
8. 复杂非线性振动系统的自激振动;
9. 带有冲击的非线性振动系统的振动机理与振动特性;
10. 非线性系统的振动及其稳定性的控制;
11. 有关非线性振动的动态过程的机理及利用;
12. 与非线性振动有关的设备或结构破坏的机理及故障的诊断方法;
13. 在复杂因素影响下的非线性波的机理及其控制与利用;
14. 板壳及复杂结构在大变形情况下的非线性振动的研究;
非线性振动第1章
近20多年来计算机技术的迅速发展,许多非线性振动问题 可以借助数值计算与数值模拟方法予以解决,这就使得非线性 振动问题的解法向前推进了一大步。
1 非线性振动的利用; 2 非线性振动的控制; 3 非线性振动的机理 。
目前在工程技术部门中,对许多非线性振动机理的研究 还很不深入。例如,对于一些在复杂非线性因素影响下的强 非线性多自由度系统的精确求解、复杂时变过程的特性、复 杂系统失稳的机理、复杂自激振动的起因和发展过程,一些 重大机械设备产生重大事故和发生破坏的原因,亚谐分叉解 的形成,混沌运动的产生等等。
工作温度:287.9o C
转速: 1490 r/min
额定功率:4000-13000 KW
高 度:8 m
价 格:9000 万元
2021/3/15
非线性振动第1章
10
沈阳鼓压缩机股份有限公司和我们的合作项目:4.8万千瓦 煤液化用大型气体离心压缩机
功率;48000 千瓦;转速:高速轴:8100 转/分, 低速轴:4700 转/分;
8. 复杂非线性振动系统的自激振动;
9. 带有冲击的非线性振动系统的振动机理与振动特性;
10. 非线性系统的振动及其稳定性的控制;
11. 有关非线性振动的动态过程的机理及利用;
12. 与非线性振动有关的设备或结构破坏的机理及故障的诊断方法;
13. 在复杂因素影响下的非线性波的机理及其控制与利用;
14. 板壳及复杂结构在大变形情况下的非线性振动的研究;
非线性振动第1章
非线性振动第1章 等效
1 2 2 1 2
2
2
0
1 2 ( x, x)dx 2
2
2 2 2 [2 x x x f ( x , x )] d 0 0
f (a cos , a
0
2
2 [2 ( a0 sin ) 2 a cos 0 a cos 2 sin )] d 0
3 5 0 2 a 2 a 4 4 8
则原方程的等价线性方程为:
骣2 3 5 2 ç & & & x + cx + ç0 + a + a 4 ÷ x = F0 sin t ÷ ÷ ç 桫 4 8
强迫振动的稳态解为:
x t a cos t
1 kx x 3 x 5 ) 0 (cx m
x
k m
2 0
1 ) (cx kx x 3 x 5 ) f ( x, x m
1 2a0 1
2
x 2 x x 0
2
0
f (a cos , a0 sin )sin d
根据线性振动理论振幅和相位角分别为:
a F0 2 3 5 2 2 4 2 0 a a c 4 8
2 1/ 2
arctan
c 02 a 2 a4 2
3 4 5 8
2 3 5 & & & x + 0 x + (cx + x + x ) = F0 sin t
等效线性化方程
& & & x + e x + ke x = F0 sin t
(振动理论课件)非线性振动概述
而线性常微分方程的数学理论已十分完善,因此将非 线性系统以线性系统代替是工程中常用的有效方法, 但仅限于一定的范围。 ➢ 至于什么属于线性振动问题,在未说明该系统预期工 作范围之前没有明确答复。因为系统中某些部件响应 与其激励之间的关系可能会依赖与其工作范围
非线性振动概述
➢ 当非线性因素较强时,用线性理论得出的结果 不仅误差过大,而且无法对自激振动、参数振 动、多频响应、超谐和亚谐共振、跳跃现象等 实际现象作出解释。
A
几何非线性
➢几何非线性—例2
单摆振动方程 gsin 0
l 这是一个非线性方程,对于小偏角,sin
可以得到足够精确的线性方程 g 0
l
可得单摆的固有振动周期为 T 2 l 与摆角无关,具有等时性
g
但是对于较大的偏角,必须考虑动非线性的影响。如果偏角并不 十分大,可以对sinθ展开成泰勒级数只取前两项,
非线性振动概述
➢几何方法—研究非线性振动的定性分析方法
❖ 传统的几何方法是利用相平面内的相轨迹作为对运动 过程的直观描述。
❖ 在常微分方程定性理论的基础上,根据相轨迹的几何 性质判断微分方程解的性质。利用相平面内的奇点和 极限环作为平衡状态和孤立周期运动的几何表述。
❖ 因此,关于奇点的类型和稳定性的研究,关于极限环 的存在性和稳定性的研究,以及稳定性随参数变化的 研究,是传统几何方法讨论的主要内容。
➢ 在工程问题中,稳态运动往往对应于机械系统的正常 工作状态。这种工作状态必须是稳定的,因为只有稳 定的运动才是可实现的运动。
非线性振动的定性分析方法
➢ 相平面法是最直观的定性分析方法,它只适用于单 自由度系统
➢ 相平面法利用相轨迹描绘系统的运动性态。相轨迹 的奇点和极限环分别对应于系统的平衡状态和周期 运动。
非线性振动概述
➢ 当非线性因素较强时,用线性理论得出的结果 不仅误差过大,而且无法对自激振动、参数振 动、多频响应、超谐和亚谐共振、跳跃现象等 实际现象作出解释。
A
几何非线性
➢几何非线性—例2
单摆振动方程 gsin 0
l 这是一个非线性方程,对于小偏角,sin
可以得到足够精确的线性方程 g 0
l
可得单摆的固有振动周期为 T 2 l 与摆角无关,具有等时性
g
但是对于较大的偏角,必须考虑动非线性的影响。如果偏角并不 十分大,可以对sinθ展开成泰勒级数只取前两项,
非线性振动概述
➢几何方法—研究非线性振动的定性分析方法
❖ 传统的几何方法是利用相平面内的相轨迹作为对运动 过程的直观描述。
❖ 在常微分方程定性理论的基础上,根据相轨迹的几何 性质判断微分方程解的性质。利用相平面内的奇点和 极限环作为平衡状态和孤立周期运动的几何表述。
❖ 因此,关于奇点的类型和稳定性的研究,关于极限环 的存在性和稳定性的研究,以及稳定性随参数变化的 研究,是传统几何方法讨论的主要内容。
➢ 在工程问题中,稳态运动往往对应于机械系统的正常 工作状态。这种工作状态必须是稳定的,因为只有稳 定的运动才是可实现的运动。
非线性振动的定性分析方法
➢ 相平面法是最直观的定性分析方法,它只适用于单 自由度系统
➢ 相平面法利用相轨迹描绘系统的运动性态。相轨迹 的奇点和极限环分别对应于系统的平衡状态和周期 运动。
非线性振动1
1 0 0 x 1 x 1 c o s k ( t t 0 ) x 2 s in k ( t t 0 ) k x k x 0 s in k ( t t ) x 0 c o s k ( t t ) 1 0 2 0 2
通解为:
式中 x , x 2 0是初扰动,由此得:
1 2 n
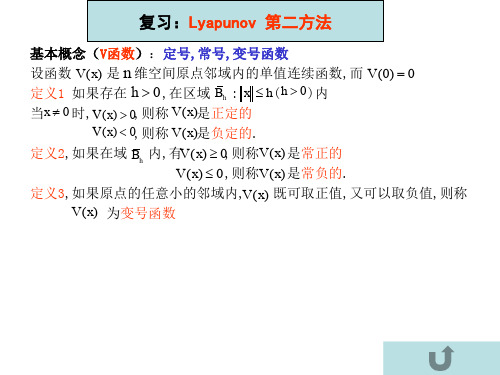
严格的稳定性概念由 A .M 李雅普诺夫给出: 定义1 如果任取 0 ( H , 无论如何小),对于任意给定的初时 刻 t 0 0 ,存在 ( t , ) 0 ,( 由 t 0 和 确定),任取初扰动 x 0,只要满 足 x ,对于一切 t t 0 有 X ( t ) 那么系统(1)的平衡就是稳定的.
故单摆运动在其平衡位置是稳定的. 另外,根据,定理2,不是渐近稳定的 定理3 (巴尓巴欣---克拉索夫斯基,1952)如果存在正定函数 ,它由(1)构成 的全导数是常负的,并且在全导数为零的集合 ,除原点外,不包含(1)的整 条轨线在内,则(1)的无扰动运动是渐近稳定的. 例如,证明对于有阻尼的下垂摆,平衡是渐近稳定的. 证明:扰动运动的微分方程是:
T 1 2
1 2 k 2 A 1 2
1
2
1 2
求得 a 1 1
1 2
k
2
0
,
A
1 4
(k )
2 2
根据定理1,只要 A
0 ,即 k
时,函数 V ( x1 , x 2 )是正定的.
n
对于扰动运动微分方程 x X ( x ) x R , (1) 以下假设函数V ( x ) 是单值连续的.V (0 ) 0 ,对x具有连续偏导数 (i=1,2…n)
通解为:
式中 x , x 2 0是初扰动,由此得:
1 2 n
严格的稳定性概念由 A .M 李雅普诺夫给出: 定义1 如果任取 0 ( H , 无论如何小),对于任意给定的初时 刻 t 0 0 ,存在 ( t , ) 0 ,( 由 t 0 和 确定),任取初扰动 x 0,只要满 足 x ,对于一切 t t 0 有 X ( t ) 那么系统(1)的平衡就是稳定的.
故单摆运动在其平衡位置是稳定的. 另外,根据,定理2,不是渐近稳定的 定理3 (巴尓巴欣---克拉索夫斯基,1952)如果存在正定函数 ,它由(1)构成 的全导数是常负的,并且在全导数为零的集合 ,除原点外,不包含(1)的整 条轨线在内,则(1)的无扰动运动是渐近稳定的. 例如,证明对于有阻尼的下垂摆,平衡是渐近稳定的. 证明:扰动运动的微分方程是:
T 1 2
1 2 k 2 A 1 2
1
2
1 2
求得 a 1 1
1 2
k
2
0
,
A
1 4
(k )
2 2
根据定理1,只要 A
0 ,即 k
时,函数 V ( x1 , x 2 )是正定的.
n
对于扰动运动微分方程 x X ( x ) x R , (1) 以下假设函数V ( x ) 是单值连续的.V (0 ) 0 ,对x具有连续偏导数 (i=1,2…n)
非线性物理(单摆杜芬方程)讲义
面。所有相轨线都将呈现在柱
2 任意角度无阻尼单摆振动
单摆周期 周期与摆角无关?
T0 2 / 0 2 l g ? T ?
T0为零摆角极限下的周期 看看实验结果:
T/T0
0 1.0000 5 1.0005 10 1.0019 20 1.0077 30 1.0174 45 1.0369
定性结论:
1. 周期随摆角增加 而增加 2. 随摆角增加波形 趋于矩形
d 2 g sin 0 2 dt l
d 2 2 0 sin 0 2 dt
(1) (2) (3)
非线性方程, 式中角频率:
0 g / l
线性化处理
d 2 2 0 sin 0 2 dt
x x x sin x x 3! 5! 7!
g l
t
看作 t ),可得
(16)
1 2 E 1 cos H 2 mgl
由此解得
常量
2H 1 cos
(17)
3 任意角度无阻尼单摆的相图与势能曲线
单摆完整相图
0 ]附近相轨线为近似椭圆形的闭合道; 1.坐标原点[ 0, 2.平衡点[ 0 ]为单摆倒置点(鞍点),附近相轨线双曲线; 0 ]或相反的连线为分界线. 0 ]到[ 3.从[
相图
引入代换 0t t 得: d 2 0 2 dt 一次积分后:
1 d 1 2 E 2 dt 2
2
(6)
式中E 为积分常数,由初始条件决定。把 d dt , 看作为两 个变量,则方程是一个圆周方程,圆的半径为 2 E ,振动过 程是一个代表点沿圆周转动。
非线性振动.ppt
t 0 x 2 V (t, x1, x2, x3) 2 x 2
这里,a( x ) x 2 ,b( x ) 2 x 2 。
注意: 设 V(t, x) 是具有无穷小上界的正定函数,
即 a( x ) V (t, x) b( x )
则 V(t, x) 的变化范围如图(手绘图)。
e t x1
取正定函数
V
x12
e
t
x
2 2
[注:V x12 x22 x,2 V (t,0) 0]
求得:V. et x22 (2a(t) 1)
。 根据定理(1),如果对一切 t
t0
,有a(t)
1 2
,则无扰运动是稳定的
定义4 如果存在K类函数b(r) ,使得函数V (t, x)在区域 t 0, x h, (h H)内, 满足:V (t, x) b( x ),则函数 V (t, x)具有无穷小上界。
(1) V (t, x) a( x ), V (t,0) 0 (正定的)
(2)
.
V (t, x)
0,
(常负的)
则非驻定系统(1)的无扰运动是稳定的。
例
求单自由度系统,q..
a(t)
.
q
e
t
q
0
无扰运动 q 0的稳定条件
解:化成标准形式
.
x1
x2
.
x2
a(t ) x 2
解析方法: 摄动法(小参数法) 渐进法(KBM法) 谐波法 多重尺度法
(3)数值解法
摄动法(小参数法)
L-P方法的基本概念由天文学家A. Lindstedt于1883年提出,
第一章非线性振动初步讲解

2 任意角度无阻尼单摆振动
单摆周期数学表达式
对方程
d 2 2 sin 0 0 2 dt
双曲点
乘以 d / dt 后积分 其中 E 2 2 cos 0 0
d 2 E 20 cos dt
2
积分 d [2(cos cos )1 / 2 0 0
势能曲线
• 基本方程 若取 0 1后积分得
d 2 2 sin 0 0 dt2
2
1 d cos E 2 dt 左边第一项是单摆动能 K, 左边第二项是势能 V 右边积分常数E是单摆总能
势能曲线是余弦函数
V ( ) cos
3 无阻尼单摆的相图与势能曲线
2 dt 2
2 任意角度无阻尼单摆振动
单摆周期
周期与摆角无关? 看看实验结果:
T/T0
双曲点
T0 2 / 0 2 l g ? T
0 1.0000 5 1.0005 10 1.0019 20 1.0077 30 1.0174 45 1.0369
定性结论: 1. 周期随摆角增加而增加 2. 随摆角增加波形趋于矩形
dt
0t
d [2(cos cos0 )]1/ 2
设t = 0时, 0 ,周期为 T,在 t T / 4时应有 0 ,故有:
0T / 4
0
0
2 sin 2 0 / 2 sin得:
1 2 2 0 1 3 2 4 0 T T0 1 sin sin 2 2 4 2 2
0 0
该式是振幅为P,角频率为 0 的简谐振动,其振动波形为正弦曲线。角频 率只与摆线 l 得长度有关,与摆锤质量无关,称为固有角频率。