基于足式移动的果蔬采摘机器人设计
自动水果采摘机器策划书3篇
自动水果采摘机器策划书3篇篇一《自动水果采摘机器策划书》一、项目背景随着农业现代化的发展,水果种植规模不断扩大,传统的人工采摘方式面临着效率低下、成本高昂等问题。
为了提高水果采摘的效率和质量,降低人工成本,我们计划研发一款自动水果采摘机器。
二、产品概述1. 名称:自动水果采摘机器2. 功能:能够自动识别水果的成熟度,精准采摘成熟的水果,并进行初步的分类和包装。
3. 特点:智能化:采用先进的图像识别和传感器技术,实现精准采摘。
高效率:大大提高采摘速度,减少人工成本。
适应性强:可适用于多种水果的采摘。
三、市场分析1. 市场需求:水果种植户对高效采摘工具的需求日益增长。
2. 竞争情况:目前市场上已有一些类似产品,但在智能化和适应性方面还有提升空间。
3. 市场潜力:随着农业现代化的推进,自动水果采摘机器的市场前景广阔。
四、技术方案1. 硬件设计:包括采摘机械臂、图像识别系统、传感器等。
2. 软件设计:开发智能控制算法,实现自动采摘和分类。
五、项目实施计划1. 研发阶段:[具体时间区间 1],完成产品的设计和研发。
2. 测试阶段:[具体时间区间 2],进行实地测试和优化。
3. 生产阶段:[具体时间区间 3],开始批量生产和投放市场。
六、营销策略1. 与水果种植大户合作,进行产品推广。
2. 参加农业展会,提高产品知名度。
3. 通过网络平台进行宣传和销售。
七、财务预算1. 研发费用:[具体金额]2. 设备采购费用:[具体金额]3. 营销费用:[具体金额]4. 其他费用:[具体金额]八、风险评估与应对1. 技术风险:可能存在技术难题,需加强研发团队建设。
2. 市场风险:市场接受度存在不确定性,要做好市场调研和推广。
3. 应对措施:持续进行技术创新,根据市场反馈及时调整产品和营销策略。
篇二《自动水果采摘机器策划书》一、项目背景随着农业现代化的不断推进,水果采摘作为农业生产中的一个重要环节,面临着劳动力短缺、人工成本高、效率低下等问题。
日光温室番茄采摘机器人设计与试验

日光温室番茄采摘机器人设计与试验一、本文概述Overview of this article随着农业科技的不断进步和劳动力成本的逐渐上升,自动化和智能化的农业机械设备已成为现代农业发展的重要方向。
其中,日光温室番茄采摘机器人作为智能农业的重要组成部分,其研发与应用对于提高农业生产效率、降低人工成本以及保障食品安全具有重要意义。
本文旨在探讨日光温室番茄采摘机器人的设计与试验,以期为相关领域的研究与应用提供有益的参考。
With the continuous progress of agricultural technology and the gradual increase in labor costs, automated and intelligent agricultural machinery and equipment have become an important direction for the development of modern agriculture. Among them, the tomato harvesting robot in the sunlight greenhouse is an important component of intelligent agriculture, and its research and application are of great significance for improving agricultural production efficiency, reducing labor costs, and ensuring food safety. This articleaims to explore the design and experimentation of tomato harvesting robots in solar greenhouses, in order to provide useful references for research and application in related fields.本文首先介绍了日光温室番茄采摘机器人的研究背景和意义,阐述了国内外在该领域的研究现状和发展趋势。
果蔬采摘机器人机械系统设计与关键技术研究的开题报告
果蔬采摘机器人机械系统设计与关键技术研究的开题报告一、研究背景随着国民生活水平的提高,人们对食品质量和健康日益关注,果蔬成为人们日常饮食中必不可少的一部分。
然而,传统的果蔬采摘方式存在着人力成本高、效率低且难以保证采摘质量等问题。
因此,发展一种适应现代农业生产需求的果蔬采摘机器人势在必行。
二、研究目的和意义本研究旨在设计一种能够自主采摘水果和蔬菜的机器人,并对相关技术进行深入研究。
研究成果可以实现果蔬采摘作业的自动化、智能化和信息化,提高采摘的效率、减少人力成本并保证采摘质量。
同时,该研究对于推动现代农业的可持续发展、实现农业生产的高效化与智能化具有重要的现实意义。
三、研究内容和方法1. 系统设计本研究采用机械、电气、控制等多学科综合设计方法,搭建果蔬采摘机器人机械系统。
涉及到机器人结构设计、选用关键元器件、机械系统动态分析等内容。
2. 传感器技术采用多种传感器对果蔬进行检测和定位,以实现机器人的自主操控。
包括图像处理技术、深度学习算法、惯性导航等。
3. 控制系统设计机器人运动轨迹控制算法和运动控制系统,保证机器人按照预定路径精准移动和执行采摘任务。
同时,实现机器人自我保护和避障能力,提高其安全性。
4. 智能化管理系统建立智能云平台,对机器人的运作进行远程监控管理。
通过大数据分析和机器学习技术,提高机器人采摘效率和准确性,并为农业生产提供更多的数据决策支持。
四、研究计划1. 第一年进行果蔬采摘机器人的机械结构设计和选型;开展机械系统动态分析和传感器技术的研究;确定机器人运动轨迹控制算法和控制系统设计方案。
2. 第二年开展机器人运动轨迹控制系统的实现和机器人自主避障算法的设计;研究智能化管理系统的设计和开发。
3. 第三年集成机器人的各项功能;实现机器人对各类果蔬的自主采摘;进行机器人的性能测试和系统优化。
五、预期成果1. 设计一种可实现水果和蔬菜自主采摘的机器人;2. 确定最佳机械和电气元器件的选型方案,并构建出一套完善的机械系统;3. 实现机器人的自主运动和采摘功能,提高采摘效率和准确率;4. 建立智能化管理系统,对机器人运作进行远程监控和管理,并为农业生产提供数据决策支持。
《基于机器视觉的乔木类水果采摘装备设计与试验研究》

《基于机器视觉的乔木类水果采摘装备设计与试验研究》 一、引言 随着科技的不断进步,农业自动化和智能化已成为现代农业发展的重要方向。其中,基于机器视觉的乔木类水果采摘装备的设计与试验研究,对于提高采摘效率、降低人工成本、保障果实品质具有重要意义。本文旨在探讨基于机器视觉的乔木类水果采摘装备的设计原理、方法及试验研究,以期为相关领域的研究与应用提供参考。 二、机器视觉在乔木类水果采摘中的应用 机器视觉技术通过模拟人眼功能,实现对目标的识别、跟踪和测量。在乔木类水果采摘中,机器视觉技术可应用于果实定位、识别和分级等方面,从而提高采摘效率和果实品质。机器视觉技术能够快速准确地识别果实的位置、大小、颜色等特征,为采摘装备提供精确的采摘指令。 三、乔木类水果采摘装备设计 1. 设备构成:乔木类水果采摘装备主要包括机械臂、视觉系统、控制系统等部分。其中,机械臂负责实现果实的采摘动作,视觉系统负责识别和定位果实,控制系统负责协调各部分的工作。 2. 设计原则:在设计过程中,应遵循可靠性、稳定性、高效性、低成本等原则,确保采摘装备能够在复杂的环境中稳定工作,提高采摘效率,降低运营成本。 3. 关键技术:采摘装备的关键技术包括果实识别与定位技术、机械臂运动控制技术、图像处理与分析技术等。其中,果实识别与定位技术是确保采摘准确性的关键。 四、试验研究 1. 试验材料:选用常见的乔木类水果,如苹果、梨、桃等作为试验对象。 2. 试验方法:通过搭建试验平台,对采摘装备进行实际采摘测试。测试内容包括果实识别准确性、采摘速度、采摘损失率等指标。 3. 试验结果与分析:根据试验数据,对采摘装备的性能进行评价。通过分析试验结果,找出存在的问题和不足,对设备进行优化改进。 五、结论 基于机器视觉的乔木类水果采摘装备的设计与试验研究,对于提高采摘效率、降低人工成本、保障果实品质具有重要意义。通过实际应用,可以有效地提高果农的生产效率,降低劳动强度,提高果实品质和产量。同时,该技术的应用还有助于推动农业现代化和智能化的发展。 在未来的研究中,可以进一步优化果实识别与定位技术,提高机械臂的运动控制精度和稳定性,以进一步提高采摘效率和果实品质。此外,还可以探索将其他先进技术如人工智能、物联网等应用于乔木类水果采摘装备中,以实现更加智能化的农业生产。 总之,基于机器视觉的乔木类水果采摘装备的设计与试验研究具有重要的现实意义和应用价值。通过不断的技术创新和优化,将为农业现代化和智能化的发展做出更大的贡献。 六、技术创新与展望 基于机器视觉的乔木类水果采摘装备,无疑是一项充满技术创新的研究项目。然而,科技发展的脚步永不停歇,这一技术还有很大的发展空间和潜力。 首先,对于果实识别与定位技术,可以进一步引入深度学习和计算机视觉的最新研究成果。利用深度学习算法,可以更准确地识别果实的位置、大小、形状等特征,从而更精确地指导机械臂进行采摘。此外,可以利用多传感器融合技术,如激光雷达、红外传感器等,提高采摘装备在复杂环境下的工作能力。 其次,在机械臂的运动控制方面,可以引入更先进的控制算法和硬件设备。例如,可以采用更高精度的伺服电机和控制器,提高机械臂的运动速度和定位精度。同时,可以引入自适应控制算法,使机械臂能够根据不同果实的特点和采摘环境的变化,自动调整运动参数和策略,从而提高采摘效率和果实品质。 此外,可以进一步探索将人工智能、物联网等技术应用于乔木类水果采摘装备中。例如,可以通过物联网技术,将多个采摘装备连接起来,形成一个智能化的采摘系统。在这个系统中,可以通过云计算和大数据技术,对采摘数据进行实时分析和处理,从而实现对采摘装备的远程监控和智能控制。同时,可以利用人工智能技术,对采摘装备进行自我学习和优化,使其能够适应不同的采摘环境和任务。 在未来的研究中,还可以探索将这一技术应用于其他类型的果树和农作物。通过对不同类型果树的采摘需求进行深入研究和分析,可以进一步优化采摘装备的设计和性能,从而更好地满足农业生产的需求。 总之,基于机器视觉的乔木类水果采摘装备的设计与试验研究具有重要的现实意义和应用价值。通过不断的技术创新和优化,不仅可以提高果农的生产效率、降低劳动强度、提高果实品质和产量,还可以推动农业现代化和智能化的发展。在未来,我们有理由相信这一技术将会在农业生产中发挥更大的作用。 基于机器视觉的乔木类水果采摘装备设计与试验研究,在当下农业科技发展中具有举足轻重的地位。随着技术的不断进步,我们可以进一步深化这一领域的研究,为农业生产带来更多的可能性。 一、深入探索机器视觉技术 在现有的基础上,我们可以进一步研究并优化机器视觉算法,使其能够更准确地识别不同类型的果实,包括其形状、大小、颜色、成熟度等特征。通过提高识别精度,采摘装备可以更准确地定位果实,从而提高采摘速度和定位精度。此外,还可以研究如何使机器视觉技术适应不同的光照条件、果实颜色和背景等复杂环境,以增强其在实际应用中的稳定性和可靠性。 二、引入深度学习技术 深度学习技术可以为机械臂提供更强大的学习和决策能力。通过训练,机械臂可以学习如何根据果实的特征和环境变化自动调整运动参数和策略,从而更好地适应不同的采摘任务。此外,深度学习还可以用于优化物联网和云计算平台的数据处理和分析能力,实现对采摘装备的更精准的远程监控和智能控制。 三、优化物联网和云计算技术应用 在物联网技术的应用上,我们可以进一步研究如何将多个采摘装备有效地连接起来,形成一个高效、智能的采摘系统。在这个系统中,云计算和大数据技术可以实时处理和分析大量的采摘数据,为采摘装备的远程监控和智能控制提供支持。此外,我们还可以研究如何利用物联网技术实现采摘装备的自我诊断和自我修复功能,提高其维护效率和寿命。 四、拓展应用范围 除了乔木类水果,我们还可以探索将这一技术应用于其他类型的果树和农作物。针对不同类型果树的采摘需求,我们可以对采摘装备进行定制化设计,优化其性能和适应性。例如,针对某些需要特殊处理或采摘技巧的果树,我们可以研究如何通过机器学习和人工智能技术,使采摘装备具备更强的自适应能力和学习能力。 五、关注用户体验与设备交互 在设计与试验研究中,我们还应关注用户体验和设备交互。通过设计友好的人机交互界面,使果农能够更方便地操作和控制采摘装备。同时,我们还应关注设备的安全性和可靠性,确保在采摘过程中不会对果实和果树造成损害。 六、推动产业化和标准化发展 在技术研究的同时,我们还应关注产业的实际需求和市场前景。通过推动采摘装备的产业化和标准化发展,降低生产成本和价格,使更多的果农能够享受到科技进步带来的红利。同时,我们还应加强与相关企业和机构的合作,共同推动农业现代化和智能化的发展。 总之,基于机器视觉的乔木类水果采摘装备的设计与试验研究具有重要的现实意义和应用价值。通过不断的技术创新和优化,我们将能够为农业生产带来更多的可能性,推动农业现代化和智能化的发展。 七、技术实现的挑战与解决方案 在基于机器视觉的乔木类水果采摘装备的设计与试验研究中,我们面临着诸多技术实现的挑战。首先,如何准确识别不同类型的果实,特别是在复杂多变的自然环境中,是一个巨大的技术难题。此外,对于果实成熟度的判断,也需要我们通过深度学习和图像识别技术来进一步提高精度。同时,机器人的操作灵活性和作业效率也需要我们在设计中充分考虑。 针对这些问题,我们可以采取一系列的解决方案。首先,我们可以采用先进的图像处理和机器学习技术,通过大量的训练和学习,提高果实的识别精度和成熟度判断的准确性。其次,我们可以对采摘装备进行优化设计,提高其操作灵活性和作业效率。例如,我们可以采用多传感器融合技术,提高采摘装备对环境的感知能力,使其能够更好地适应不同的采摘环境。 八、安全性与维护性的考虑 在设计与试验过程中,我们还需要充分考虑采摘装备的安全性和维护性。首先,我们要确保采摘装备在作业过程中的安全性,避免对果农和果树造成伤害。其次,我们要考虑采摘装备的维护性,使其在使用过程中能够方便地进行维护和保养,延长其使用寿命。 九、实地试验与效果评估 在设计与试验研究完成后,我们还需要进行实地试验和效果评估。通过在真实的果园环境中进行试验,我们可以了解采摘装备的实际性能和效果,进一步优化其设计和性能。同时,我们还需要对试验结果进行评估和分析,了解其在实际应用中的优缺点和改进方向。 十、培训与推广 在技术研究完成后,我们还需要进行培训与推广工作。通过培训果农如何使用和维护采摘装备,帮助他们更好地应用这一技术。同时,我们还需要加强与相关企业和机构的合作,共同推广这一技术的应用,促进农业现代化和智能化的发展。 十一、未来展望 未来,随着人工智能、物联网等技术的不断发展,基于机器视觉的乔木类水果采摘装备将会有更广阔的应用前景。我们可以预见,未来的采摘装备将具备更高的识别精度、更强的自适应能力和更高效的操作性能。同时,随着产业化和标准化的发展,采摘装备的生产成本将进一步降低,使更多的果农能够享受到科技进步带来的红利。 总之,基于机器视觉的乔木类水果采摘装备的设计与试验研究具有重要的现实意义和应用价值。通过不断的技术创新和优化,我们将能够为农业生产带来更多的可能性,推动农业现代化和智能化的发展。 十二、挑战与应对 虽然基于机器视觉的乔木类水果采摘装备设计有着显著的潜力和价值,但在实际操作和研发过程中仍面临着许多挑战。这些挑战主要包括技术的先进性、应用的实际性和环境因素等。 技术的先进性挑战在于不断进步的科技发展速度和不断变化的市场需求。为了保持技术的领先地位,我们需要持续关注最新的科研成果和技术动态,及时将新的技术应用到采摘装备的设计和研发中。同时,我们还需要加强与科研机构和高校的合作,共同推动相关技术的研发和应用。 应用的实际性挑战在于如何将理论研究和实际应用相结合。在设计和试验过程中,我们需要充分考虑果树的生长环境、果实的特点以及果农的实际需求等因素,确保采摘装备在实际应用中能够发挥最佳效果。此外,我们还需要加强与果农的沟通和交流,了解他们的实际需求和反馈意见,及时调整和优化设计和研发方案。
基于自动化的苹果采摘机器人

基于自动化的苹果采摘机器人一、引言随着农业科技的不断发展,自动化农业机器人在现代农业生产中起到了重要的作用。
本文将介绍一种基于自动化的苹果采摘机器人,该机器人能够实现高效、准确地采摘苹果,提高农业生产效率,减轻农民的劳动强度。
二、机器人的工作原理1. 机器人结构该苹果采摘机器人由机械臂、视觉系统、控制系统和移动底盘组成。
机械臂负责采摘苹果,视觉系统用于识别成熟的苹果,控制系统控制机器人的运动,移动底盘使机器人能够在果园中自由移动。
2. 视觉系统机器人配备了高分辨率的摄像头和图像处理算法,能够准确地识别苹果的成熟度和位置。
通过对苹果的颜色、形状和纹理等特征进行分析,机器人能够判断苹果是否成熟,并确定采摘的位置。
3. 机械臂机械臂采用多关节结构,具有灵活的动作能力。
根据视觉系统的识别结果,机械臂能够精确地定位并采摘苹果。
机械臂末端配备了夹爪,能够稳固地抓住苹果并将其放入篮子中。
4. 控制系统控制系统是机器人的大脑,负责协调机器人的各个部分工作。
通过与视觉系统和机械臂的实时通信,控制系统能够根据果园的情况调整机器人的运动轨迹和采摘策略,以最大限度地提高采摘效率。
5. 移动底盘移动底盘由多个驱动轮和电动机组成,能够使机器人在果园中自由移动。
底盘上安装有传感器,能够感知地形和障碍物,确保机器人的安全运行。
三、机器人的工作流程1. 果园扫描机器人首先通过视觉系统扫描整个果园,获取果树的分布和苹果的成熟度信息。
机器人会记录下每棵果树的位置和苹果的数量,为后续的采摘工作做准备。
2. 目标定位根据果园扫描的结果,机器人会选择一个目标果树,并确定采摘的顺序。
机器人会使用视觉系统精确定位目标果树,并计算出采摘的路径。
3. 采摘操作机器人的机械臂会根据目标果树的位置和苹果的成熟度,精确地采摘苹果。
机械臂会将采摘的苹果放入篮子中,并记录下采摘的数量和时间。
4. 移动到下一个目标采摘完成后,机器人会根据预先设定的路径移动到下一个目标果树。
水果采摘机械手的设计
水果采摘机械手的设计摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子轻工和原子能等部门。
由于机械臂在各行各业中得到了愈来愈广泛的应用,机械臂控制的多样化、复杂化的需要也随之日趋增多。
作为当今科技领域研究的一个热点,提高机械臂的控制精度、稳定性、操作灵活性对于提高其应用水平有着十分重要的意义。
在原有机械手上进行PLC等设计可使机械手实现自动化定位控制丶自动化工作等。
通过重新编程序可使其变成多功能机器。
关键词:采摘;机械手;水果1、机械手的发展趋势机械手是集机械、电子、控制、计算机、信息等多学科交叉综合,它的发展和进步依赖并促进相关技术的发展和进步。
因此,机械手的主要发展方向如下:机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。
机械手控制系统向基于pc机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。
机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机械手还应用了视觉、力觉等传感器,而遥控机械手则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制。
虚拟现实技术在机械手中的作用从仿真、预演向用于过程控制发展,如使遥控机械手操作者产生置身于远端作业环境中的感觉来操纵机械手2、设计水果采摘机械手的作用据统计,2017年全国水果总产量(不含瓜果类,下同)达到1.82亿吨,比1978年增长26.7倍,年均增速8.9%。
自1994年以来,我国水果总产量稳居世界第一。
但目前存在果园人力不足、采摘效率低、有时因为采摘不及时水果坏掉、果子结在高处人工面临着高空采摘的危险等问题,而一切采摘过程目前都由人工采摘,在我国机械化的采摘目前处于空白期,即使有机械化机器的投入和使用也是个别体,且机器的投入成本往往很大,果农无法承担此高昂的成本使用该器械。
水果采摘装置设计说明
水果采摘装置设计0文献综述0.1水果采摘实现机械化的必然趋势在水果的生产作业中,收获采摘是整个生产中最耗时最费力的一个环节。
水果收获期间需投入的劳力约占整个种植过程的50%~70%。
采摘作业质量的好坏直接影响到水果的储存、加工和销售,从而最终影响市场价格和经济效益。
水果收获具有很强的时效性,属于典型的劳动密集型的工作。
但是由于采摘作业环境和操作的复杂性,水果采摘的自动化程度仍然很低,目前国水果的采摘作业基本上还是手工完成。
在很多国家随着人口的老龄化和农业劳动力的减少,劳动力不仅成本高,而且还越来越不容易得到,而人工收获水果所需的成本在水果的整个生产成本中所占的比例竟高达33%~50%。
高枝水果的采摘还带有一定的危险性。
因此实现水果收获的的机械化变得越来越迫切,发展机械化的收获技术,研究开发水果采摘机器人具有重要的意义。
研究和开发果蔬收获的智能机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本、保证新鲜果蔬品质,以及满足作物生长的实时性要求等方面都有着重要的意义。
采摘机器人是未来智能农业机械化的发展方向,具有广阔的应用前景。
2004年11月1日颁布施行的《中华人民国农业机械化促进法》还明确规定国家采取措施鼓励,扶持农业机械化的发展,机械采摘取代手工作业是必然的发展趋势。
0.2国外水果机械化采摘装置研究进展及现状水果的机械化收获技术已有40余年的研究历史。
收获作业的自动化和机器人的研究始于20世纪60年代的美国,1968年美国学者Schertz和Brown首次提出应用机器人技术进行果蔬的收获,当时开发的收获机器人样机几乎都需要有人的参与,因此只能算是半自动化的收获机械。
采用的收获方式主要是机械震摇式和气动震摇式,其缺点是果实易损,效率不高,特别是无法进行选择性的收获。
从20世纪80年代中期开始,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,以日本为代表的西方发达国家,包括美国、英国、法国、荷兰、以色列、西班牙等国家,都在水果采摘机器人方面做了大量的研究工作,涉及到的研究对象主要包括甜橙、苹果、樱桃、甜瓜、葡萄、草莓等,试验成功了多种具有人工智能的收获采摘机器人。
基于PLC三轴伺服控制系统的果蔬采摘机械手设计
基于PLC三轴伺服控制系统的果蔬采摘机械手设计丁辉;陈晓林【摘要】In order to improve fruit picking manipulator's working efficiency and positioning accuracy and reduce the fruit and vegetable picking manipulator in picking process caused by the broken rate, simplify the structure and control method of manipulator design a new PLC triaxial servo control of fruit and vegetable picking manipulator based on, the manipula-tor can be flexibly the realization of moving, lifting and clamping and relax.For the validity and reliability of the test of mechanical hand, through the apple picking experiments of the manipulator performance were tested.Through the test found that, manipulator position and swing angle adjustment in less time, overshoot is low, in line with the design re-quirements.And accurate localization rate is higher, the highest reached 98.56%, fruit and vegetable picking manipula-tor has good localization performance, single positioning time consuming is low, manipulator mechanical higher operating efficiency to meet design requirement of picking fruits and vegetables on a large scale.%为了提高果蔬采摘机械手的工作效率和定位精度、降低果蔬采摘机械手在采摘过程中造成的破碎率,以及简化机械手的结构和控制方式,设计了一种新的基于PLC 的三轴伺服控制果蔬采摘机械手. 该机械手可以灵活地实现移动、升降和夹紧与放松. 为了测试机械手的有效性和可靠性,通过苹果采摘试验对机械手的性能进行了测试. 测试发现:机械手的位置和摆角调整时间较少、超调量较低,符合设计需求. 其准确定位率较高,最高达到了98 .56%;且具有较好的定位性能,单次定位时间耗时较低,机械作业效率较高,能够满足大规模果蔬采摘的设计需求.【期刊名称】《农机化研究》【年(卷),期】2016(038)007【总页数】5页(P182-186)【关键词】三轴机械手;伺服控制;果蔬采摘;PID控制;超调量;PLC【作者】丁辉;陈晓林【作者单位】常州轻工职业技术学院,江苏常州 213164;常州轻工职业技术学院,江苏常州 213164【正文语种】中文【中图分类】S225;TP2421962年,世界第一台工业机器人问世以来,机器人技术得到了迅速的发展,机器人的使用范围已经不再局限于传统的制造业,除了工业外已被众多领域所采用,如我国也已经研发出多种特种机器人和农业采摘机器人等。
基于TRIZ理论苹果采摘机器人的设计与分析
2023年第47卷第5期Journal of Mechanical Transmission基于TRIZ理论苹果采摘机器人的设计与分析桓源任工昌孙建功徐若萱(陕西科技大学机电工程学院,陕西西安710021)摘要针对现阶段人工采摘苹果效率低、劳动强度大、采摘设备功能单一的问题,以TRIZ理论为基础,通过发明原理的启发,对苹果采摘机器人的末端执行器、运输装置、收集箱和其他结构进行了创新设计,设计出一款集采摘、收集、分拣功能于一体的机器人。
建立采摘机械臂的D-H 模型,运用Matlab对机器人的工作空间进行了分析;通过Adams对机器人采摘过程进行运动仿真,并制作1∶3实验样机,对各部分功能可行性进行了验证。
结果表明,该机器人的各部分功能完善、设计合理、运行可靠、满足使用需求,为后续机器人的进一步研制和改进提供了理论支撑。
关键词TRIZ理论采摘机器人末端执行器工作空间分析动力学仿真Design and Analysis of Apple Picking Robots Based on TRIZHuan Yuan Ren Gongchang Sun Jiangong Xu Ruoxuan(School of Mechanical and Electrical Engineering, Shaanxi University of Science and Technology, Xi'an 710021, China)Abstract Aiming at the problems of low efficiency, high labor intensity and single function of picking equipment at the current stage of manual apple picking, this study is based on the TRIZ and inspired by the principle of invention, to analyze the end effector, transport device, collection box and other structures of the apple picking robot. With innovative design, a robot integrating picking, collecting and sorting functions has been designed. The D-H model of the picking manipulator is established, the working space of the robot is analyzed by Matlab, the motion simulation of the picking process of the robot is carried out by Adams, and a 1∶3 experimental prototype is made to verify the functional feasibility of each part. The results show that the functions of each part of the robot are perfect, the design is reasonable, the operation is reliable, and it meets the needs of use, which provides theoretical support for the further development and improvement of the follow-up robot.Key words TRIZ Picking robot End-effector Analysis of operating range Dynamic simulation0 引言苹果作为常见水果,在我国已有2 000多年的栽培历史,我国作为苹果生产和种植大国,种植面积和产量稳居世界第一[1]。
基于机器视觉的苹果采摘机器人的设计与试验
总754期第二十期2021年7月河南科技Henan Science and Technology基于机器视觉的苹果采摘机器人的设计与试验赵君爱(江苏海事职业技术学院,江苏南京211100)摘要:未来农业向着自动化和智能化发展。
基于机器视觉的苹果采摘机器人系统克服了苹果生长的不规律性、视觉定位及采摘方式等技术难题,提出了一套性能稳定的硬件及软件设计方案。
因此,概述苹果采摘机器人的整体设计思路,介绍机器视觉系统的工作原理、工作流程以及系统设计。
试验结果证明,该机器人采摘表现优良。
关键词:机器视觉;苹果采摘机器人;系统设计中图分类号:TP242文献标识码:A文章编号:1003-5168(2021)20-0027-03 Design and Experiment of Apple Picking Robot Based on Machine VisionZHAO Jun’ai(Jiangsu Maritime Vocational and Technical College,Nanjing Jiangsu211100)Abstract:The trend of future agriculture is automation and intelligence.The design process of apple picking robot system based on machine vision overcomes the technical problems such as irregular apple growth,visual positioning and picking mode,puts forward a set of hardware and software design scheme with stable performance,and summariz⁃es the overall design scheme of apple picking robot,The working principle,working process and system design of ma⁃chine vision system are introduced.The experimental results show that the robot has excellent picking performance. Keywords:machine vision;apple picking robot;system design我国各行各业用工成本不断上升,特别是农业生产领域,农产品采摘耗费人力成本较高,约占整体生产成本的40%。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计制作
数码世界 P .149
基于足式移动的果蔬采摘机器人设计
刘富成 田壮 西北农林科技大学
摘要:一种基于足式移动的果蔬采摘机器人,移动方式为足式,适合在松软地面或严重崎岖不平的地形上进行果蔬采摘,具有较好的
灵活性,且机身下板有矩形排布的传感器,可按照预定轨迹行进,机械臂上安装有视觉识别模块,增加采摘准确性,实现了可在相对不平坦地形按设定轨迹,自行采摘的目的。
关键词:足式移动 采摘机器人
引言
随着中国农业机械化的不断发展,农民越来越需要一种可适应复杂地面环境并且可精确采摘果蔬的智能装备,为实现一种可适应崎岖地面的果蔬采摘机器人,本文介绍了一种可以在崎岖路面稳定行走的多足果蔬采摘机器人,其主要由足式移动系统和视觉采摘收集系统两部分组成。
1 机器人系统组成部分
1.1足式移动系统根据实际使用需求,设计足式移动机器人,通过离散的点接触地面对环境的破坏程度也较小可以在可能到达的地面上选择最优的支撑点对崎岖地形的适应性强,六足步行机器人的腿部具有多个自由度使运动的灵活性大大增强,它可以通过调节腿关节的角度保持机身水平,不易翻倒稳定性更高。
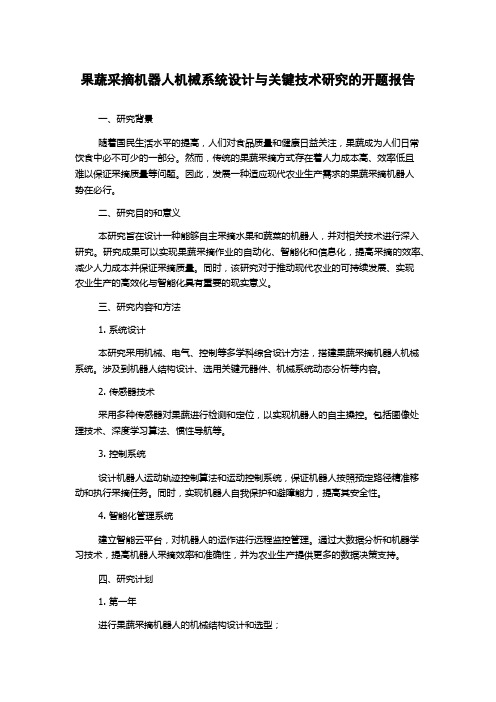
其正视图和俯视图如图1,其由机身与机械腿组成,足式移动系统包含六只机械腿,机械腿均为由三个大功率舵机构成,具有两段机体、两个关节的仿生腿。
机械腿可按照程序运动至相应位置,使机身可以精确的沿直线大步前进、大步后退、小步前进、小步后退,自身轴线与所走直线形成的偏角大于预定值时,也可以进行角量弥补调整。
图1
1.2视觉采摘收集系统
视觉采摘收集系统由采摘机械臂、视觉识别模块与收集箱组成。
采摘机械臂包括可旋转底盘、两关节机械臂、采摘抓手,可旋转底盘与两关节机械臂之间、两关节机械臂与采摘抓手之间均为大功率舵机相连接,底盘可使机械臂和抓手绕竖直轴旋转,机械臂可调整抓手的高低位置,方便采摘不同位置的蔬菜或者果实,抓手可调整其抓取装置的仰角和展角,方便其在尽量保证果蔬完整性的条件下采摘。
视觉识别部分由openmv 构成,置于采摘机械臂的第二段机体,在机械臂调整姿态过程中,会随机械臂随时记录摄像头前的图像,观察到所采摘果实会向控制板反应特殊信号;收集箱为由木质骨架和塑料构成的轻质立方体状的箱子,收集箱分为两个,放置在采摘机械臂两侧,同置于机身上板上方,前侧收集箱放置水果,后侧收集箱放置蔬菜。
2 控制电路及传感器部分
机身所包括的三块控制板,两块为舵机控制板,一块与六只机械腿相连,用于编写并存放机器人行进过程中机械腿的动作与形态,另一块与采摘机械臂相连,用于编写并存放机器人采摘过程中机械臂
的动作与形态,第三块控制板为arduino 2560,与两块舵机控制板
相连接,用于编写并存放机器人行进、调整、采摘的主函数,控制线路板为自行设计的方便控制板、传感器、电机等电路元件相连接的合理排布排针排母的电路板,供电电源分别为机械腿、传感器和机械臂、视觉模块供电。
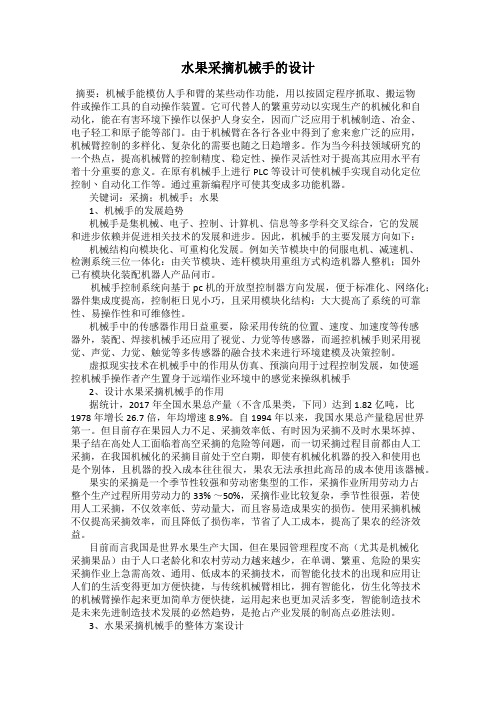
传感器排布板如图2,其由14个灰度传感器围成一个80mm ×100mm 的矩形检测范围的板子,其具体排布形式如图2,单个灰度传感器检测区域的宽度约为8mm,会时时将地面规划好的路迹反馈至主控板。
陀螺仪传感器放置在机身上,实时向主控板发送位置及速度信息,协同灰度传感器共同工作,使机器人根据所反馈信息精准地按照预定轨迹行走。
图23 机器人具体工作流程
足式移动的果蔬采摘机器人在由白色24mm 的反光条制成的预定轨迹上行走,根据多路传感器反馈的信号情况,进行相应调整使机身轴线始终与轨迹线重合,遇到由白色反光条构成的十字标,会从前行状态转至立正姿态,然后再通过多路传感器反馈的信号情况,使机身形心尽量靠近十字标交点,然后执行采摘,采摘完毕继续前行,遇到转弯相关标记则变化机械腿的姿态以另一种形式在转完后的路迹上前行,整个机身不发生方位变化,在没有十字标而有白色路迹线的停滞点的路线上,机器人根据陀螺仪所反馈的信息自动调整位置,使其沿预定轨迹行走,机器人会根据视觉识别系统反馈的结果进行采摘,在没有白色路迹线只有十字标的路线上,机器人会根据导航模块按预先设定的路线行进,在十字标处停滞进行采摘。
4 结语
目前果蔬采摘机器人多为轮式或履带式机器人,但大多数实际采摘地地形不规则且崎岖不平,轮式机器人和履带式机器人的应用受到限制。
在这种背景下本设计方案中,足式移动的果蔬采摘机器人具有独特优势,本设计方案解决在相对不平坦路面精确循迹和准确采摘果实或者蔬菜的问题。
参考文献
[1]陈敏生,徐梓麒,肖钰伦,姚伟林,潘嘉伟,毛星,王杏进.多足行走
自动摘果机器人的设计[J].科学与财富,2018,(第13期).
[2]尹晓琳.六足仿生机器人步态规划及其控制策略研究[D].哈尔滨工业大学, 2013.
[3]丁凯.六足机器人仿生运动步态规划与控制系统研究[D].东南大学, 2016.。