机器视觉测量系统
机器视觉检测系统【深度解读】

机器视觉检测系统现代工业自动化生产中涉及到各种各样的检验、生产监视和零件识别应用,如汽车零配件批量加工的尺寸检查和自动装配的完整性检查、电子装配线的元件自动定位、IC上的字符识别等。
通常这种带有高度重复性和智能性的工作是由肉眼来完成的,但在某些特殊情况下,如对微小尺寸的精确快速测量、形状匹配以及颜色辨识等,依靠肉眼根本无法连续稳定地进行,其它物理量传感器也难以胜任。
人们开始考虑用CCD照相机抓取图像后送入计算机或专用的图像处理模块,通过数字化处理,根据像素分布和亮度、颜色等信息来进行尺寸、形状、颜色等的判别。
这种方法是把计算机处理的快速性、可重复性与肉眼视觉的高度智能化和抽象能力相结合,由此产生了机器视觉检测技术的概念。
视觉检测技术是建立在计算机视觉研究基础上的一门新兴测试技术。
与计算机视觉研究的视觉模式识别、视觉理解等内容不同,视觉检测技术重点研究的是物体的几何尺寸及物体的位置测量,如轿车白车身三维尺寸的测量、模具等三维面形的快速测量、大型工件同轴度测量以及共面性测量等,它可以广泛应用于在线测量、逆向工程等主动、实时测量过程。
视觉检测技术在国外发展很快,早在20世纪80年代,美国国家标准局就曾预计未来90%的检测任务将由视觉检测系统来完成。
因此仅在80年代,美国就有100多家公司跻身于视觉检测系统的经营市场,可见视觉检测系统确实很有发展前途。
在近几届北京国际机床展览会上已经见到国外企业展出的应用视觉检测技术研制的先进仪器,如流动式光学三坐标测量机、高速高精度数字化扫描系统、非接触式光学三坐标测量机等。
2.机器视觉检测系统构成、分类及工作原理2.1 系统构成与工作原理(1)系统构成典型的视觉系统一般包括光源、镜头、CCD照相机、图像处理单元(或图像采集卡)、图像处理软件、监视器、通讯/输入输出单元等。
(2)工作原理视觉系统的输出并非图像视频信号,而是经过运算处理之后的检测结果(如尺寸数据)。
通常,机器视觉检测就是用机器代替肉眼来做测量和判断。
机器视觉检测系统
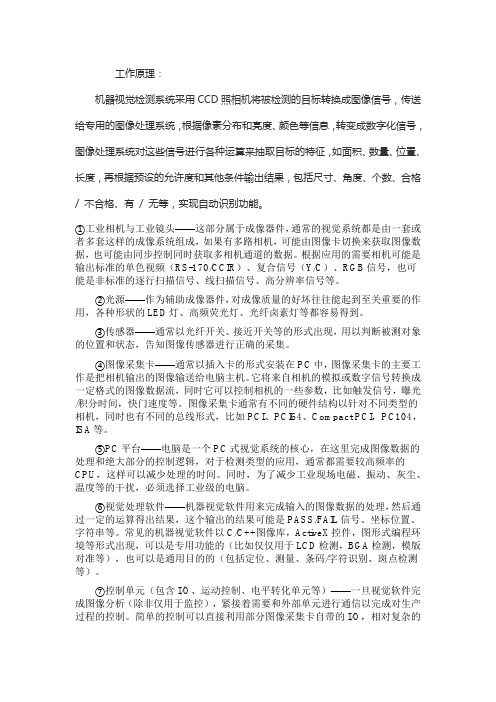
工作原理:机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/ 不合格、有/ 无等,实现自动识别功能。
①工业相机与工业镜头——这部分属于成像器件,通常的视觉系统都是由一套或者多套这样的成像系统组成,如果有多路相机,可能由图像卡切换来获取图像数据,也可能由同步控制同时获取多相机通道的数据。
根据应用的需要相机可能是输出标准的单色视频(RS-170/CCIR)、复合信号(Y/C)、RGB信号,也可能是非标准的逐行扫描信号、线扫描信号、高分辨率信号等。
②光源——作为辅助成像器件,对成像质量的好坏往往能起到至关重要的作用,各种形状的LED灯、高频荧光灯、光纤卤素灯等都容易得到。
③传感器——通常以光纤开关、接近开关等的形式出现,用以判断被测对象的位置和状态,告知图像传感器进行正确的采集。
④图像采集卡——通常以插入卡的形式安装在PC中,图像采集卡的主要工作是把相机输出的图像输送给电脑主机。
它将来自相机的模拟或数字信号转换成一定格式的图像数据流,同时它可以控制相机的一些参数,比如触发信号,曝光/积分时间,快门速度等。
图像采集卡通常有不同的硬件结构以针对不同类型的相机,同时也有不同的总线形式,比如PCI、PCI64、Compact PCI,PC104,ISA等。
⑤PC平台——电脑是一个PC式视觉系统的核心,在这里完成图像数据的处理和绝大部分的控制逻辑,对于检测类型的应用,通常都需要较高频率的CPU,这样可以减少处理的时间。
同时,为了减少工业现场电磁、振动、灰尘、温度等的干扰,必须选择工业级的电脑。
⑥视觉处理软件——机器视觉软件用来完成输入的图像数据的处理,然后通过一定的运算得出结果,这个输出的结果可能是PASS/FAIL信号、坐标位置、字符串等。
基于机器视觉的高精度工业尺寸测量系统研究
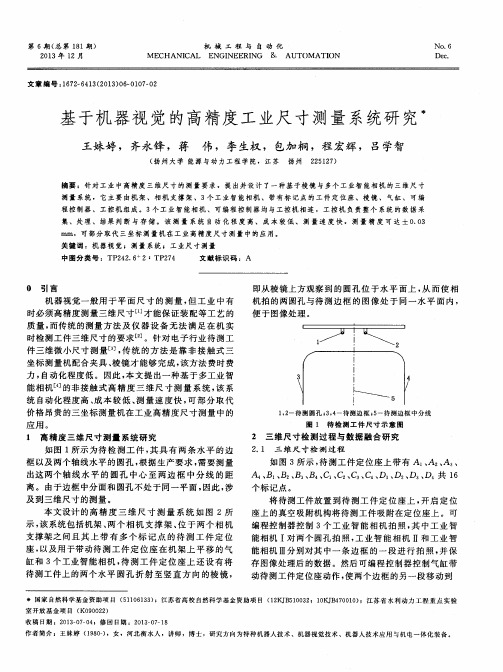
mm,可 部 分 取 代 三 坐 标 测 量 机 在 工 业 高 精 度 尺 寸 测 量 中的应 用 。 关 键 词 :机 器 视 觉 ;测 量 系统 ; 工 业尺 寸 测 量
坐 标测 量机 配合夹 具 、 棱 镜才 能 够完成 , 该 方法 费 时费 力, 自动化程 度低 。因此 , 本 文提 出一 种基 于 多工业 智 能 相机L 4 的非接 触 式 高精 度 三 维 尺 寸 测 量 系统 , 该 系 统 自动化 程度 高 、 成本较低 、 测量速度快 , 可 部 分 取 代 价 格 昂贵 的三 坐标测 量机 在工 业 高精度 尺 寸测 量 中的 应用 。 1 高精 度三维 尺寸 测量 系统 研究 如图 1 所示 为待 检 测 工 件 , 其 具 有 两 条水 平 的边 框 以及两个 轴线 水平 的 圆孔 , 根 据 生产要 求 , 需要 测量 出这 两个 轴 线 水 平 的 圆 孔 中心 至 两 边 框 中 分 线 的距 离 。由于边 框 中分面 和 圆孔 不 处于 同一 平面 , 因此 , 涉 及 到 三维尺 寸 的测 量 。 本 文设 计 的高 精 度 三 维 尺 寸 测 量 系 统 如 图 2所 示, 该 系统包 括机架 、 两 个相 机 支 撑 架 、 位 于两 个 相 机 支 撑架 之 间且 其 上 带 有 多 个标 记 点 的 待 测 工 件 定 位 座, 以及 用 于带动待 测 工 件定 位 座 在机 架 上 平 移 的 气 缸和 3 个 工业 智能 相机 , 待 测工 件 定 位 座 上 还 设 有将 待 测工件 上 的两个 水平 圆孔 折 射 至 竖 直 方 向 的棱 镜 ,
测量机器人工作原理
测量机器人工作原理测量机器人是一种具有自主定位、测量功能的先进机器人系统。
它可以应用于工业领域的测量、质检、装配等任务,以提高工作效率和精度。
本文将详细介绍测量机器人的工作原理。
一、激光测距传感器测量机器人的工作原理主要依赖于激光测距传感器。
激光测距传感器通过发射激光束,利用其特有的性质进行测距。
当激光束照射到目标物体上时,一部分激光被物体反射回来,传感器接收到反射光后,利用光的传输速度和接收时间来测量目标物体的距离。
二、机器视觉系统除了激光测距传感器外,测量机器人还配备了机器视觉系统。
机器视觉系统可以通过摄像头等视觉传感器获取目标物体的图像信息,并对图像进行处理和分析。
通过图像处理算法,机器视觉系统能够实现对目标物体的识别、定位和测量。
三、机械臂控制系统测量机器人的工作原理中,机械臂控制系统起着重要作用。
机械臂控制系统通过对机械臂关节的精确控制,实现对测量仪器和传感器的准确定位。
机械臂控制系统可以根据测量任务的需求,进行灵活的运动规划和路径控制,以达到高精度的测量结果。
四、定位与导航系统定位与导航系统也是测量机器人的关键组成部分。
通过使用定位与导航系统,测量机器人可以在工作环境中进行准确的自主定位和导航。
定位与导航系统通常利用全球定位系统(GPS)和惯性导航系统(INS),通过获取机器人当前位置和姿态信息,实现对机器人的精确定位和导航。
五、数据处理与分析测量机器人在测量过程中会产生大量的数据,包括激光测量数据、图像数据等。
数据处理与分析是测量机器人工作的重要环节。
通过利用强大的计算能力和高效的算法,测量机器人能够快速处理和分析测量数据,提取出所需的信息,并进行精确的测量结果计算。
六、应用领域测量机器人的工作原理使其可以广泛应用于各个领域。
在制造业中,测量机器人可以用于产品质检、尺寸测量和装配等任务。
在航空航天领域,测量机器人可以用于飞机表面的测量和检测。
在建筑工程中,测量机器人可以用于地形测量和建筑结构的监测。
基于机器视觉的产品尺寸自动检测系统设计

基于机器视觉的产品尺寸自动检测系统设计随着工业生产的日益发展和自动化程度的不断提高,工业自动化技术也越来越成熟。
其中机器视觉技术就是其中的一种重要的技术手段。
机器视觉技术主要通过计算机视觉系统来实现对物品的自动识别、检测、计量和分类等功能。
机器视觉技术及其相关产品应用广泛,例如工业自动生产线上的产品检测、智能交通系统中的车辆识别等。
本文主要介绍如何基于机器视觉技术来设计一个产品尺寸自动检测系统。
一、机器视觉技术的原理和应用机器视觉技术是一种通过计算机对图像信息进行处理和分析,实现自动识别、检测、计量和分类等功能的技术手段。
将这种技术应用到产品尺寸自动检测系统中,可以实现自动检测各种产品的尺寸、形状、位置等信息。
机器视觉技术主要包括图像采集、图像处理和图像识别三个方面。
图像采集:利用摄像机、线阵列扫描器、CCD、CMOS等各种不同的图像数据采集设备,将物品表面图像转化为数字信号,用以进行后续的图像处理和分析。
图像处理:对采集到的图像进行数字化、滤波、增强、分割等处理,以便对目标物体进行特征提取和分析。
图像识别:通过特征提取和匹配,对进行分类或定位等操作,以实现对目标物体的自动检测、计量、分拣和分类等功能。
二、产品尺寸自动检测系统的设计方案1、系统硬件设计系统硬件主要由采集设备、采集控制器、图像处理器、分析处理器、输出设备等组成。
其中采集设备主要采用CCD或CMOS的形态,并与采集控制器相连,控制信号进入采集设备后对尺寸进行采集。
图像处理器主要对采集的信号进行滤波和增强处理,并采用数字化处理方式,使用数字信号处理芯片实现。
分析处理器主要对处理后的信号进行分析和识别,根据实际情况使用FPGA或DSP进行处理。
2、系统软件设计系统软件的设计主要包括图像获取软件、图像处理软件和图像识别软件,软件运行在嵌入式操作系统中。
图像获取软件主要运行在采集控制器中,其主要作用是控制采集设备和实时采集信号。
图像处理软件主要通过计算机进行处理,并将处理结果传输给图像识别软件进行处理,这里主要应用数字化信号处理和算法处理。
基于机器视觉的零件尺寸检测与测量系统设计
基于机器视觉的零件尺寸检测与测量系统设计随着工业生产的发展,对零件的质量与精度要求越来越高,而传统的人工尺寸检测与测量方法已经无法满足这些要求。
因此,基于机器视觉的零件尺寸检测与测量系统应运而生。
本文将针对这一问题进行探讨。
一、介绍机器视觉技术是一门利用计算机视觉进行模式识别、目标检测和三维重建等方面的技术。
基于机器视觉的零件尺寸检测与测量系统利用计算机视觉技术,可以实现对零件尺寸的高精度检测与测量。
二、系统设计1. 摄像设备选择在设计基于机器视觉的零件尺寸检测与测量系统时,首先需要选择合适的摄像设备。
一般来说,高分辨率的摄像头能够提供更精确的检测结果。
2. 图像采集与处理图像采集是系统中的核心环节之一,通过摄像设备采集零件的图像,并对图像进行处理,提取出需要检测的特征。
图像处理算法可以采用边缘检测、二值化、滤波等方法,以提高图像的清晰度和信噪比。
3. 特征提取与分析在图像处理的基础上,需要进一步提取出零件的特征信息。
可以通过边缘检测算法提取零件的轮廓信息,或者利用模板匹配的方法提取出关键特征点。
4. 尺寸计算与结果输出根据零件的特征信息,结合相应的几何测量原理,可以计算出零件的尺寸参数。
一般来说,可以计算出零件的长、宽、高等尺寸参数,以及一些特殊形状的测量参数。
三、系统优势基于机器视觉的零件尺寸检测与测量系统相比传统的人工测量方法具有以下优势:1. 精度高:机器视觉系统可以实现对零件尺寸的高精度测量,减少了人为因素对测量结果的影响。
2. 自动化程度高:系统可以实现对多个零件的自动化测量,减少了人工测量的工作量,提高了工作效率。
3. 可靠性好:机器视觉系统的测量结果可靠性高,可以避免人工测量过程中的主观误差。
4. 数据可视化:测量结果可以通过电脑显示进行直观展示与分析,方便人们对零件质量进行评估。
四、应用领域基于机器视觉的零件尺寸检测与测量系统在很多领域都有广泛的应用,例如汽车制造、航空航天、电子电气等行业。
机器视觉系统之案例篇

2023-10-30•案例一:应用于工业生产的机器视觉系统•案例二:应用于医学影像分析的目录机器视觉系统•案例三:应用于自动驾驶的机器视觉系统•案例四:应用于农业生产的机器视觉系统01案例一:应用于工业生产的机器视觉系统机器视觉系统的定义和功能工业生产中常见的机器视觉系统类型机器视觉系统在工业生产中的重要性工业生产中的机器视觉系统介绍•案例一:检测工业产品外观缺陷•应用场景:生产线上的产品检测•技术方案:采用图像处理和深度学习技术•实现效果:自动识别和分类产品缺陷,提高生产效率和产品质量•案例二:引导机器人进行自动化操作•应用场景:生产线上的自动化操作•技术方案:采用计算机视觉和深度学习技术•实现效果:自动识别和跟踪目标,实现精准操作,提高生产效率机器视觉系统在工业生产中的应用案例工业生产中机器视觉系统的优势与挑战•优势•提高生产效率和产品质量•降低人工成本和操作失误率•提高生产线的智能化和自动化水平•挑战•算法的准确性和稳定性•系统的可靠性和稳定性•数据的采集和处理02案例二:应用于医学影像分析的机器视觉系统机器视觉系统在医学影像分析中的定义机器视觉系统是一种利用计算机、图像传感器和深度学习技术对医学影像进行分析、理解和解释的系统。
医学影像分析中的机器视觉系统介绍医学影像的特点医学影像包括X光片、CT扫描、MRI等,这些图像具有高维度、高噪声、复杂纹理等特点,需要专业的医学知识进行解读和分析。
机器视觉系统在医学影像分析中的流程机器视觉系统首先对医学影像进行预处理,包括去噪、增强等操作,然后通过特征提取和模型训练,对影像进行分类、定位和定量分析。
案例一:肺癌检测应用背景:肺癌是全球最常见的恶性肿瘤之一,早期诊断和治疗对提高患者生存率具有重要意义。
应用方法:机器视觉系统通过对CT扫描等医学影像进行分析,自动检测出肺部结节等异常组织,提高医生的诊断准确性和效率。
案例二:脑部疾病诊断应用背景:脑部疾病如阿尔茨海默病、脑梗等严重影响着人类的健康和生活质量。
机器视觉的四大功能
机器视觉的四大功能
机器视觉功能
机器视觉系统就是利用机器代替人眼来作各种测量和判断。
机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/不合格、有/无等,实现自动识别功能。
从功能上讲,机器视觉系统主要具有四大类功能:尺寸测量、缺陷检测、模式识别、视觉定位。
机器视觉的四大功能
1、尺寸测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖ 方向
▪ 直射光:入射光基本 上来自一个方向,入 射角小,被照射物体 有阴影;
▪ 散射光:入射光来自 多个方向,不会投射 出明显阴影。
光源
光源
❖ 光谱
▪ 光的组成成份,如日光由从紫外到红外的所有光谱组成。 ▪ 取决于光源的类型和光学滤色镜。 ▪ 可见光光谱如图所示:
光源பைடு நூலகம்
❖ 偏振性,又称极化光
此范围内的物体能够清晰成像,这个范围被称为景深 (Depth of View,DOV) ▪ 焦距
选择镜头的关键参数
❖ 物镜的焦距f
▪ f决定了物体在成像面成像的大小,焦距越长,成像越大; ▪ f可以短到几毫米,长达数十米; ▪ 变焦距镜头可以通过调节焦距获得不同的放大倍数。
❖ 相对孔径F=D/f(光圈)
照明技术
❖ 物体的反射特性
▪ 镜面式反射;漫反射
照明技术
❖ 颜色
▪ 相加色:两种或三种波长组合成某种波长光的效果。 ▪ 相减色:反射时从光谱中去除某些波长的光。
❖ 光学密度、折射率、纹理、表面方向
照明技术
❖ 正向照明
▪ 镜面:光线直接反射进入镜头; ▪ 离轴照明:光源在镜头轴线侧面、避开了镜面反射; ▪ 半漫射照明:光照较均匀,如环形光; ▪ 漫射照明:光线来自所有方向,镜面反射最少; ▪ 黑场:光线与镜头视线方向垂直。
▪ 一般光波的震荡方向是不定的,极化光的震荡方向处在一个 确定的平面上。
▪ 在镜面反射中保留了定向性,可以借此消除镜面反射光的影 响。
❖ 强度
▪ 光照强度会影响摄像头的曝光,光线不足会造成对比度降低, 噪声过大;
▪ 光线过强会造成图像饱和,能量浪费以及散热等问题。
❖ 均匀性
▪ 在所有机器视觉应用中,都要求均匀的光照。照射强度会随 距离和角度偏离而减小,需要特别考虑。
❖ 背光照明
▪ 漫射式:光源+平板,背面照射; ▪ 凝聚式:使用镜头将光线集中于一个方向; ▪ 黑场:适用于检测透明物体中的裂痕、气泡等。
不同光源与照明技术效果举例
❖ 高角度亮场与低角度暗场
光照强、较均匀
光滑表面的文字、伤 痕等纹理检测
不同光源与照明技术效果举例
❖ 从边上的黑场照明
最适合凹凸不平表面及表面缺陷,缺点 是阴影太大。
▪ D是镜头中光线能通过的有效圆孔直径,D越大,收集的光 线越多;如f = 50mm,D = 8.9mm,则相对孔径F= 8.9/50=1/5.6;
▪ 镜头上以1/F表示光圈值,如3.4,5.6,8,11,16等,光圈 每增加一档,光照度增加一倍;
选择镜头的关键参数
❖ 相对孔径F=D/f(光圈)
▪ F越大,景深越短;光圈越小,景深越长。为了获得较大景 深的清晰图像,可以采取加大光强,减小光圈的方法。
光源
❖ 光源的种类
▪ 按发光器件:卤素等、荧光等、LED灯、氙(xian)灯等; ▪ 按几何形状:环形、方形、穹型、长条型灯; ▪ 按发光特性:点光源、线光源、面光源等; ▪ 按照射角度:直射、间接、掠射、同轴、平行等。
▪ LED灯:颜色丰富、发光效率高、响应速度快、体积小、发 热小、功耗低、发光稳定、寿命长、易于组成不同形状的光 源,是重要的光源发展趋势。
LE = Di-f = PMAG*f
选择镜头
❖ 物距WD、放大倍数PMAG和焦距f的关系 P M A G = F S ie e ln d so o f rV S iiz e e w (m (m m m ))H H o iW D D i LE = Di-f = PMAG*f
f=WD*PMAG 1+PMAG
不同光源与照明技术效果举例
❖ 用明视野和暗视野照明对比
不同光源与照明技术效果举例
❖ 用碗状照明消除晕眩光
不同光源与照明技术效果举例
❖ 用透射光检查物体的有无
不同光源与照明技术效果举例
❖ 光源的颜色差异
中心部有银色涂层的铜框架
不同光源与照明技术效果举例
❖ 红外线照明
不同光源与照明技术效果举例
❖ 红外线照明
不同光源与照明技术效果举例
❖ 紫外线照明
不同光源与照明技术效果举例
❖ 偏振光照明
不同光源与照明技术效果举例
❖ 偏振光照明
图②镜子上灰尘指印,掠射;图③镜子上油脂指 印,暗视场;图④光盘上油脂指印,暗视场
不同光源与照明技术效果举例
❖ 偏振光照明
镜头
❖ 镜头的视野、景深和焦距示意图
❖ 视场角
▪ 物镜的视场角决定了成像面上良好成像的空间范围。 ▪ 当成像面尺寸一定时,f越长,视场角越小。反之视场角
越大。
选择镜头
PMAG:镜头的放大倍数
选择镜头
❖ 如何选择焦距 WD:工作距离 Ho:视野的高度 Hi:相机有效成 像面高度 PMAG:镜头的放大倍数 LE:镜头像平面的扩充距离——为实现聚焦像平面后移
镜头
❖ 基本概念
▪ 成像面:被测物及其背景通过镜头投影到二维图像传感器平 面,一般是长宽比为4:3的矩形;
▪ 视野(Field of View,FOV):与成像面对应的景物平面范 围;
▪ 工作距离(Work Distance,WD):被测物到物镜的距离; ▪ 景深:以镜头最佳聚焦WD为中心,前后存在一个范围,在
利用上式可通过被测物尺寸(Ho)、物距(WD) 和像平面高度(Hi)计算出所需镜头的焦距f。
选择镜头
❖ 普通镜头选择步骤:
▪ 获得物体至镜头的距离WD,如果是一个范围,取中间值; ▪ 计算图像放大倍数PMAG; ▪ 利用公式计算所需的焦距; ▪ 选取与计算值最接近的标准镜头产品,并取其焦距值; ▪ 根据所选镜头焦距重新核算镜头到物体的距离WD。 举例: 物体至镜头的距离在10cm~30cm范围内,取WD=20cm。 设视场高度为6cm,传感器成像面高度为6.6mm,则镜头放 大倍数为:P M A G = 6 . 6 m m / 6 0 m m = 0 . 1 1
现代检测技术 机器视觉测量系统
精勤求学 敦笃励志 果毅力行 忠恕任事
主要内容
•图像传感器
CCD, CMOS
•图像测量系统
照明、镜头、图像传感与采集、中央处理器
•图像处理技术
基本概念、图像增强、图像分析
视频信号
图像测量系统
图像采集
控制中枢、图像处理
镜头、图像传感器 照明
照明
❖ 光源 ❖ 照明技术 ❖ 不同光源与照明技术效果举例
选择镜头
计算所需镜头焦距:
f = W D * P M A G 2 0 0 * 0 .1 1 /1 0 .1 1 1 9 .8 2 m m